
Abstract
We propose an underwater CSMA/CA protocol with multi-RTS and multi-DATA receptions using the long underwater propagation delay. We analyze the throughput and delay of the proposed underwater CSMA/CA protocol through a ring-based underwater network modeling. The proposed protocol does not need to maintain the information of internode propagation delay for each pair of underwater nodes. In the proposed protocol, when there are simultaneous transmissions of RTS frames from different underwater sensors to an underwater sink as their back-off counters reach zero, the sink can recover some RTS frames which are not overlapped at the sink in the time domain due to the long underwater propagation delay. Then, the sink transmits CTS frame containing the DATA transmission order and the IDs of the sensors which transmitted the recovered RTS frames. Sensors which correspond to the IDs contained by the CTS frame can transmit DATA frame to the sink according to the DATA transmission order. We evaluate the throughput and delay performance of the proposed protocol with varying the number of sensors and the contention window size compared to the conventional protocols. The analytical results agree with the simulation results well for the proposed protocol with various numbers of sensors and contention window sizes. The analytical and simulation results show that the proposed protocol outperforms the conventional protocols.
1. Introduction
Nowadays, medium access control (MAC) protocols in underwater acoustic networks (UANs) have been studied for underwater nodes to share the medium effectively [1–3]. Since the radio signals in the underwater medium suffer severe path losses, the acoustic signals need to be utilized for underwater communications. Akyildiz et al. [1] investigated several fundamental aspects and research challenges of underwater acoustic sensor networks (UASNs). UASNs have many applications such as gathering of underwater sensing data, assisting in ocean navigation, monitoring of oceanic pollution, and prevention of the forthcoming disasters. Stojanovic and Preisig [2] studied the underwater acoustic communication channels including propagation models and statistical characteristics. Pompili and Akyildiz [3] presented the networking protocols for UANs which are MAC, routing, transport-layer, and cross-layer protocols.
There have been many researches on MAC protocols for terrestrial networks. Bianchi [4] studied the saturation throughput analysis of IEEE 802.11 distributed coordination function (DCF). Bianchi and Tinnirello [5] presented an analytical model to evaluate the throughput and delay performance of the DCF. Hwang et al. [6] analyzed the performance of IEEE 802.11e enhanced distributed channel access (EDCA) with a virtual collision handler (VCH). Hwang et al. [7] proposed a more accurate analytical model for the throughput analysis of the DCF which takes into account the back-off freezing mechanism. Since the acoustic signals propagate the underwater very slowly at the speed of about 1500 m/sec, direct applications of terrestrial MAC protocols to UASNs are not appropriate.
To consider unique characteristics of underwater communications which are different from those of terrestrial communications, many researchers have studied MAC protocols for UANs. Molins and Stojanovic [8] presented a slotted floor acquisition multiple access (FAMA) protocol for UANs. Slotted FAMA employs the carrier sensing (CS) and handshaking of control packets between a sender and a receiver with time slotting. Peleato and Stojanovic [9] proposed a distance-aware collision-avoidance protocol (DACAP) for ad hoc UASNs. Since DACAP is an asynchronous protocol, DACAP utilizes different handshaking durations for different receivers to minimize the mean handshaking duration. Chirdchoo et al. [10] proposed Aloha with collision avoidance (Aloha-CA) and Aloha with advance notification (Aloha-AN) for UANs. Aloha-CA and Aloha-AN do not need handshaking and clock synchronization. Ng et al. [11] proposed a MACA-U protocol which is an adaptation of multiple access collision-avoidance (MACA) protocol to UANs. They presented the state transition rules, packet forwarding strategy, and back-off algorithm. Syed et al. [12] proposed a distributed and energy-efficient MAC protocol for UASNs, called Tone Lohi (T-Lohi). T-Lohi utilizes a tone-based contention resolution and a low-power wake-up receiver for the energy efficiency. Chirdchoo et al. [13] proposed a receiver-initiated packet train (RIPT) protocol for UANs. RIPT includes receiver-initiated reservations and four-way handshaking to coordinate frames from neighboring stations. Guo et al. [14] presented an adaptive propagation-delay-tolerant collision-avoidance protocol (APCAP) for UASNs. APCAP uses the MAC level pipelining for transmissions of packets from a source node to destination nodes. APCAP employs a compulsory maximum latency for the potential interferers not to interfere. Pompili et al. [15] proposed a CDMA-based MAC protocol for UASNs. They presented a closed-loop distributed algorithm to optimize the transmit power and the code length jointly. Fan et al. [16] proposed a hybrid reservation-based MAC (HRMAC) protocol for UASNs. HRMAC has a circle period which is divided into notice period (NP), order period (OP), data period (DP), and reply period (RP). In NP, each sender broadcasts a NOTICE message. In OP, a coordinator broadcasts an ORDER message. In DP, the senders send data in a round-robin manner. In RP, receivers respond to the senders using REPLY messages. Ng et al. [17] proposed an underwater acoustic MAC protocol with reverse opportunistic packet appending (ROPA). ROPA is an asynchronous and sender-initiated protocol based on handshaking and packet appending. In ROPA, a sending node initiates the handshaking to schedule its neighboring nodes to append their packets. Noh et al. [18] proposed a delay-aware opportunistic transmission scheduling (DOTS) protocol for mobile underwater networks. In DOTS, by utilizing the expected transmission schedules and the propagation delay map of neighboring nodes, the exposed nodes among the neighboring nodes can transmit packets concurrently. Han et al. [19] proposed a multisession FAMA (M-FAMA) protocol based on a sender-initiated handshaking for underwater acoustic streams. In M-FAMA, a sending node initiates the handshaking for concurrent transmissions of multiple sessions from the sending node to different receiving nodes. Lee and Cho [20] proposed a cascading multihop reservation and transmission (CMRT) for UASNs. In CMRT, relay stations initiate the handshake of control packets for the next hop during the handshake for the previous hop. CMRT cascades the flow of packets from a source to a destination via the handshakes of relay stations. Chirdchoo et al. [21] proposed a MACA-based MAC protocol for multiple neighbors (MACA-MN) for UANs. MACA-MN is a sender-initiated packet train protocol with the three-way handshake and sender-initiated reservations using the internode propagation delay information. Peng et al. [22] proposed a contention-based parallel reservation MAC (COPE-MAC) for UANs. In COPE-MAC, they presented a cyber carrier sensing technique by using the propagation delays to neighbor nodes.
In this paper, we propose an underwater CSMA/CA protocol with multi-RTS and multi-DATA receptions using the long underwater propagation delay. We analyze the throughput and delay of the proposed underwater CSMA/CA protocol through a ring-based underwater network modeling. The proposed protocol does not need to maintain the information of internode propagation delay for each pair of underwater nodes. In the proposed protocol, when there are simultaneous transmissions of RTS frames from different underwater sensors to an underwater sink as their back-off counters reach zero, the underwater sink can recover some RTS frames which are not overlapped at the sink in the time domain due to the long underwater propagation delay. Then, the underwater sink transmits CTS frame containing the DATA transmission order and the IDs of the underwater sensors which transmitted the recovered RTS frames. Each underwater sensor which corresponds to the ID can transmit DATA frame to the underwater sink according to the DATA transmission order. We evaluate the throughput and delay performance of the proposed protocol with varying the number of sensors and the contention window size compared to the conventional protocols. The analytical results agree with the simulation results well for the proposed protocol with various numbers of sensors and contention window sizes. The analytical and simulation results show that the proposed underwater protocol outperforms the conventional protocols in underwater sensor networks.
The rest of the paper is organized as follows. In Section 2, we propose an underwater CSMA/CA protocol with multi-RTS and multi-DATA receptions for underwater sensor networks. In Section 3, we present a ring-based underwater network modeling for performance analysis of the proposed underwater CSMA/CA protocol. In Section 4, we analyze the throughput and delay performance of the proposed protocol by using the ring-based modeling. In Section 5, we present the analytical and simulation results for the throughput and delay performance of the proposed protocol with varying the number of sensors and the contention window size compared to the conventional protocols. Finally, Section 6 concludes this paper.
2. An Underwater CSMA/CA Protocol with Multi-RTS and Multi-DATA Receptions
We consider 1-hop underwater sensor networks with n underwater sensors and an underwater sink node. Each of n underwater sensors can transmit the sensing data to the underwater sink via 1-hop underwater communication. Underwater sink and underwater sensors can access the underwater wireless medium via the proposed underwater CSMA/CA protocol. The operation of the proposed underwater CSMA/CA protocol with multi-RTS and multi-DATA receptions is as follows.
Each underwater sensor performs the back-off procedure which is based on the RTS/CTS exchange method of the conventional CSMA/CA protocol [10, 11]. When the transmission of RTS and DATA frames from an underwater sensor to an underwater sink is successful, the value of the back-off counter for the underwater sensor which successfully transmitted RTS and DATA frames is randomly chosen from
Each underwater sensor performs carrier sensing to detect the transmissions from other underwater sensors. If there is no transmission from other underwater sensors for a slot time, each underwater sensor reduces the value of its back-off counter by one. Otherwise, each underwater sensor freezes its back-off counter. When the back-off counter of an underwater sensor reaches zero, the underwater sensor transmits RTS frame containing its ID to the underwater sink. When there are simultaneous transmissions of RTS frames from different underwater sensors to the underwater sink as their back-off counters reach zero, the underwater sink can recover some RTS frames which are not overlapped at the sink in the time domain due to the long underwater propagation delay, as shown in Figure 1(a).

Proposed underwater CSMA/CA protocol with multi-RTS and multi-DATA receptions.
The underwater sink reads the IDs of underwater sensors from the recovered RTS frames. Then, the underwater sink transmits CTS frame containing the DATA transmission order and the IDs of the underwater sensors which transmitted the recovered RTS frames. Each underwater sensor can hear the CTS frame transmitted from the underwater sink via 1-hop underwater communication. Each underwater sensor which corresponds to the ID can transmit DATA frame to the underwater sink according to the DATA transmission order. Then, the underwater sink transmits ACK frame to each underwater sensor as shown in Figure 1(b).
3. A Ring-Based Modeling for the Proposed Underwater CSMA/CA Protocol
Let

According to (1), we present a ring-based underwater network modeling as shown in Figure 2. When the back-off counters of both underwater sensor 1 and sensor 2 reach zero, sensor 1 and sensor 2 transmit RTS frames simultaneously to the underwater sink. When sensor 1 is located at ring 1 and sensor 2 is located at ring 2 in Figure 2, RTS frames transmitted simultaneously from sensor 1 and sensor 2 may not be overlapped at the sink according to (1). When the back-off counters of underwater sensors reach zero, the sensors transmit RTS frames to the underwater sink simultaneously. When the sensors are located at different rings in Figure 2, RTS frames transmitted simultaneously from the sensors to the sink can be recovered at the sink according to (1).
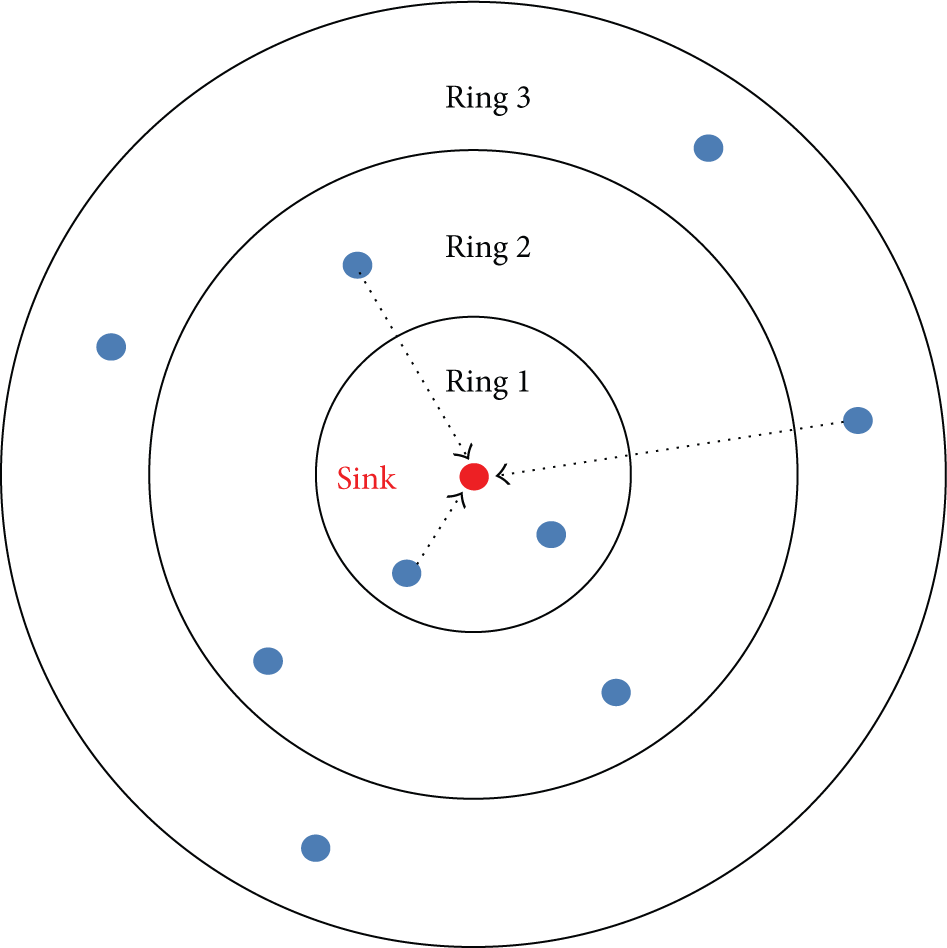
A ring-based underwater network modeling.
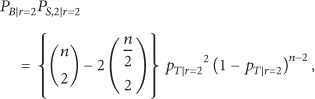
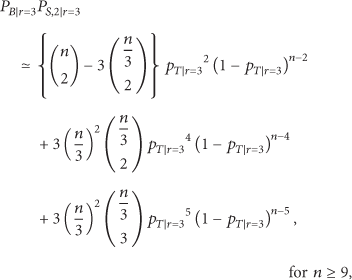
We analyze the proposed underwater CSMA/CA protocol by using the ring-based underwater network modeling with r rings. We consider

When the back-off counter of at least one of n sensors reaches zero, the sensor transmits RTS frame via the underwater wireless channel. The channel is busy when at least one of n sensors transmits RTS frame. The channel busy probability

In the case of

In the case of



In the case of




4. Throughput and Delay Analysis of the Proposed Underwater CSMA/CA Protocol
To evaluate the throughput of the proposed underwater CSMA/CA protocol with n underwater sensors and an underwater sink, the normalized throughput

To evaluate the mean access delay of the proposed underwater CSMA/CA protocol with n underwater sensors and an underwater sink, we use an approach which is similar to [5]. The mean access delay

5. Analytical and Simulation Results
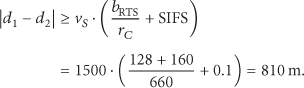
To evaluate the throughput and delay of the proposed underwater CSMA/CA protocol by using the ring-based underwater network modeling, we use the input parameters for analytical and simulation results as shown in Table 1 [1–5]. According to (1), we can obtain the following inequality:
Input parameters.

Figure 3 shows the throughput of the proposed underwater CSMA/CA protocol in the case of
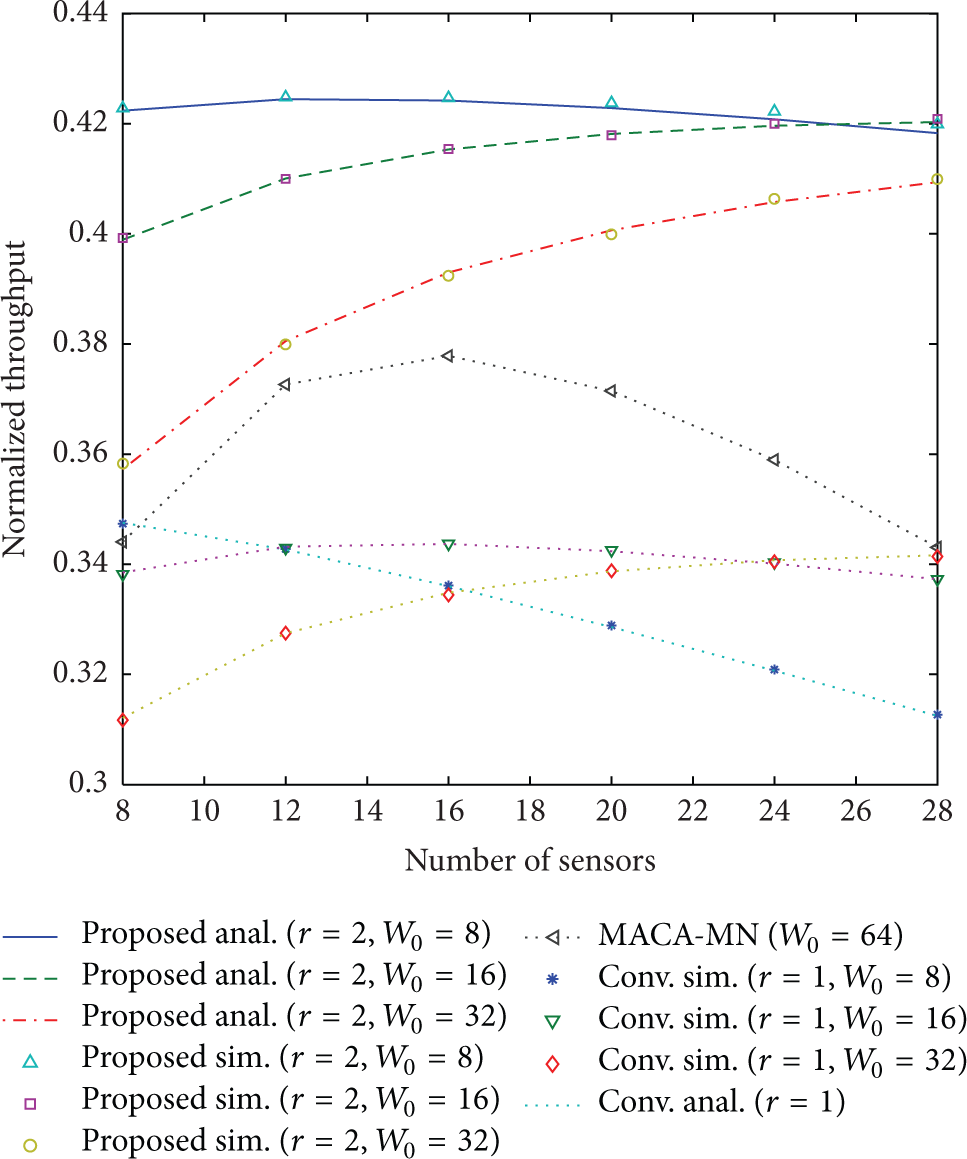
Throughput of the proposed underwater CSMA/CA protocol (
Figures 3–6 show a comparison of the results of the proposed analytical model (lines) and simulation (marks) in terms of normalized throughput and mean access delay. The analytical results agree with the simulation results well for the proposed protocol with various numbers of sensors and contention window sizes. Figures 3–6 also show that the analytical (lines) and simulation (marks) results for the conventional CSMA/CA protocol agree well. In Figures 3–6, we also compare the throughput and delay performances of the proposed protocol with those of MACA-MN [21]. For the comparison, we slightly modified MACA-MN in order to consider SIFS additionally for the switching time between transmission and reception at each sensor. Since MACA-MN uses a simple back-off algorithm, each sensor randomly selects a slot from a constant contention window size, which may yield a lower performance than the proposed protocol.

Throughput of the proposed underwater CSMA/CA protocol (

Mean access delay of the proposed underwater CSMA/CA protocol (
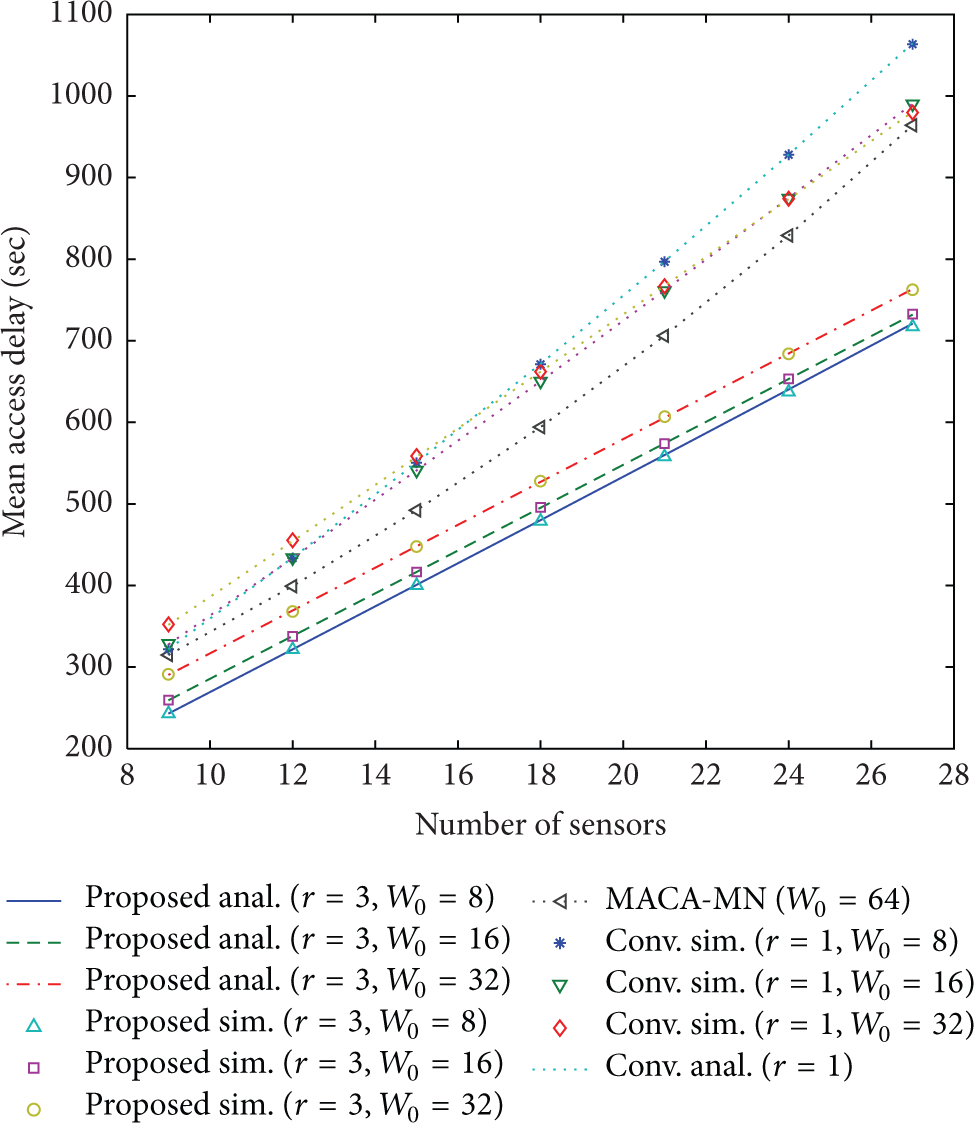
Mean access delay of the proposed underwater CSMA/CA protocol (
Figure 4 shows the throughput of the proposed underwater CSMA/CA protocol in the case of
Figure 5 shows the mean access delay of the proposed underwater CSMA/CA protocol with varying the number of sensors n and the value of
Figure 6 shows the delay performance of the proposed protocol with varying the values of n and
6. Conclusions
In this paper, we proposed an underwater CSMA/CA protocol with multi-RTS and multi-DATA receptions using the long underwater propagation delay. We analyzed the throughput and delay of the proposed underwater CSMA/CA protocol through a ring-based underwater network modeling. The proposed protocol does not need to maintain the information of internode propagation delay for each pair of underwater nodes. In the proposed protocol, when there are simultaneous transmissions of RTS frames from different underwater sensors to an underwater sink as their back-off counters reach zero, the sink can recover some RTS frames which are not overlapped at the sink in the time domain due to the long underwater propagation delay. Then, the sink transmits CTS frame containing the DATA transmission order and the IDs of the sensors which transmitted the recovered RTS frames. Sensors which correspond to the IDs contained by the CTS frame can transmit DATA frame to the sink according to the DATA transmission order. We evaluated the throughput and delay performance of the proposed protocol with varying the number of sensors and the contention window size compared to the conventional protocols. The analytical results agree with the simulation results well for the proposed protocol with various numbers of sensors and contention window sizes. The analytical and simulation results show that the proposed protocol outperforms the conventional protocols. As a further study, we will extend the proposed protocol to work with multiple receivers in multihop networks. Using the proposed protocol, each receiver can recover some simultaneously transmitted frames from senders to the receiver in multihop networks.
Footnotes
Competing Interests
The authors declare that there are no competing interests regarding the publication of this paper.
Acknowledgments
This research was a part of the project titled “Development of Distributed Underwater Monitoring & Control Networks,” funded by the Ministry of Oceans and Fisheries, Korea, and supported in part by the Research Grant of Kwangwoon University in 2015.