
Abstract
Node localization is an important supporting technology in wireless sensor networks (WSNs). Traditional maximum likelihood estimation based localization methods (MLE) assume that measurement errors are independent of the distance between the anchor node and a target node. However, such an assumption may not reflect the physical characteristics of existing measurement techniques, such as the widely used received signal strength indicator. To address this issue, we propose a distance-based MLE that considers measurement errors that depend on distance values in this paper. The proposed distance-based MLE is formulated as a complicated nonlinear optimization problem. An exact solution is developed based on first-order optimal condition to improve the efficiency of search. In addition, a two-dimensional search method is also presented. Simulation experiments are performed to demonstrate the effectiveness of this localization. The simulation results show that the distance-based localization method has better localization accuracy compared to other range-based localization methods.
1. Introduction
Wireless sensor networks (WSNs) are self-organizing networks. In most applications, wireless sensor nodes in a WSN are randomly deployed. Thus, the location information of nodes is essential for WSNs [1]. However, due to energy constraints of the nodes, regular sensor nodes or unknown nodes cannot locate their own positions directly. These nodes have to rely on some external nodes that are often referred to as the anchor nodes to help them accomplish the task of determining their locations. Localization of wireless sensor nodes has become a hot research issue in recent years.
Anchor nodes in WSNs are usually equipped with GPS modules and can thus obtain their own locations through corresponding localization functions. Unknown nodes, on the other hand, derive their location information with the help of the anchor nodes [2]. More specifically, the unknown nodes would calculate their own locations through communication with the anchor nodes based on a localization algorithm although there are some applications in which the unknown nodes may not have to rely on the anchor nodes for coarse localization [3].
Localization methods can be divided into range-based and range-free methods [4]. Range-based location methods generally measure the absolute distance or azimuth information between an anchor node and an unknown node as the basis for the calculation of the location of the unknown node [5]. Range-free localization methods do not need to measure the absolute distance or azimuth information. Rather, they estimate the distance between nodes based on the internode connectivity, the plurality of routing information exchange, and the overlapping areas [6]. Although range-free location methods have lower requirements for hardware and power consumption, the accuracy of localization is generally lower than that of the range-based methods [7,8]. In this paper, we employ an approach that follows the range-based methods.
Range-based localization methods have relatively higher localization accuracy. In such a method, one or more distance measurement techniques are used to estimate the localization of the unknown nodes [9]. Existing techniques for distance measurement include received signal strength indicator (RSSI) [10], time of arrival (TOA) [11], time difference of arrival (TDOA) [12], and angle of arrival (AOA) [13].
Range-based techniques based on RSSI rely on the principle that the radio signal is attenuated regularly as the distance increases [14]. Such techniques use the attenuation degree of received signals to estimate the distance between the anchor node and the unknown target node without requiring any additional hardware and data exchange. The cost of implementation is low and can thus be realized easily [15]. Therefore, such techniques have become the most commonly used techniques for localization of wireless sensor nodes in WSNs. Based on the general principle of RSSI, most traditional maximum likelihood estimation (MLE) localization methods assume that measurement errors are independent of the distance between the anchor node and the unknown target node and thus calculate the position of the unknown target node by solving a convex optimization problem. However, the assumption may contradict with the physical characteristics of RSSI.
To address this issue, we propose a distance-based MLE in which we take into consideration measurement errors that vary with the distance. The proposed distance-based MLE is then formulated as a complicated nonlinear optimization problem. To solve this optimization problem, two solutions will be presented. The first one is based on the first-order optimal condition and the second is based on a two-dimensional search. Simulation experiments will also be performed to demonstrate the effectiveness of our proposed localization methods. The simulation results show that our distance-based localization methods have better localization accuracy compared to other range-based localization methods.
The rest of this paper is organized as follows. In Section2, we review some related work on sensor localization. In Section3, we present a model in which a mobile anchor node is introduced into sensor localization to help further reduce energy consumption of regular sensor nodes for localization. In Section4, we present our proposed methods. In Section5, we conduct some experiments to evaluate the proposed methods and to demonstrate the advantages of our methods through comparison analysis. Finally, in Section6, we conclude this paper.
2. Review of Existing Work
Suppose, in a two-dimensional space, there are N anchor nodes
In the following subsections, we will briefly review two commonly used range-based localization methods: the traditional range-based multilateral measurement localization method and the maximum likelihood estimation method.
2.1. Range-Based Multilateral Measurement Based Methods
The range-based multilateral measurement localization method (RB-MML) is commonly used for node localization in WSNs. If there is no measurement noise, the positions of the unknown node and the anchor nodes satisfy the following equations [16]. Thus, to obtain the position of the unknown node, we need to solve the following equations:

From the above equation system, we can get the following solution:

It should be noted that traditional range-based multilateral measurement localization methods ignore the effect of measure noises, affecting the accuracy of localization. Thus, methods that consider the effect of measure noises should be investigated such as the maximum likelihood estimation method.
2.2. Maximum Likelihood Estimation Based Methods
Maximum likelihood estimation (MLE) methods suggest that the measured distance
Recall that the probability density functions of


By solving the above equations, we can obtain the maximum likelihood estimation value for the unknown node. This method improves the accuracy of localization compared to range-based multilateral measurement localization methods.
3. Mobile Anchor Node Localization Model
Boukerche et al. proposed the LTS-MB model to locate unknown nodes using a single mobile anchor node [17] in which the mobile anchor node is assumed to have unlimited energy supply. In this model, the mobile anchor node moves along a prespecified path in the deployment area of the sensor nodes and broadcasts its position information to unknown nodes along the way. After receiving the position information from the mobile anchor node, an unknown node would use the RSSI based location method to calculate its own position.
To reduce the energy consumption of unknown nodes, especially that resulting from location computation, we improve the LTS-MB model in our proposed method. First, during communication, after receiving the position information from the mobile anchor node, the unknown node only returns a confirmation message and never calculates its own position. The calculation of the position of the unknown node is performed by the mobile anchor node, which has sufficient energy and computation power. Therefore, the energy consumption of unknown nodes is further reduced in our model. Second, we improve the localization method based on RSSI and propose an improved distance-based maximum likelihood estimation (DB-MLE) localization method. In this method, a distance influence factor is introduced to reflect the influence of ranging errors on the location values. Our proposed method is suitable for applications where the requirement on the accuracy of positions is very high. To make our method suitable for applications that require quick response, we further design a quick local search method in the calculation of the position of the unknown nodes.
4. The Proposed DB-MLE Method
Traditional MLE methods can improve the accuracy of range-based localization to a certain extent. However, they fail to consider the effect of measurement errors on the measured distances. Here, we propose an improved distance-based maximum likelihood estimation (DB-MLE) localization method in which we consider measurement errors that depend on distance values. Specifically, DB-MLE assumes that measurement error will increase as the distance between the anchor node and the unknown node increases. Based on this assumption, DB-MLE introduces the concept of the measurement error factor which weighs the importance of different measurement values to reduce the effect of measurement errors on localization results, thus further improving the accuracy of localization.
4.1. Assumptions and Model
Given a mobile anchor node
Based on the ranging principle, we make the following assumptions:
The measured distance is proportional to the true distance, which satisfies the following condition:
where the random variable ξ is the Gauss white noise that follows the normal distribution Different measurement distances among different nodes are independent of each other.

With the above assumptions, the joint probability density function is as follows:


The corresponding likelihood function becomes

DR-MLE calculates the position of the unknown node by maximizing the above objective function. Due to its nonconvexity, we propose two different methods to solve this problem.
4.2. The First-Order Optimality Method
Note that solving DR-MLE is equivalent to minimizing the following objective function:
And its partial derivative is

We then propose the following method based on the first-order optimality condition.
Solve the following equations. Suppose that all roots are given as Calculate the objective value

4.3. The Two-Dimensional Search Method
According to the characteristics of multilateral triangle localization method, we further design a two-dimensional search method. Define the position coordinate of the unknown node

In (13), λ is a unitless weight and (

Geometric illustration of (13).
4.4. A Quick Local Search Method
The proposed first-order optimality and two-dimensional search methods can find the optimal location of the unknown node in our DB-MLE model. However, the computational efficiency of these methods may be low. To reduce the computation burden, we propose a quick local search method (QLSM) based on gradient descent.
QLSM includes three phases: initialization, gradient descent, and optimal selection. In the initialization phase, we generate K initial solutions based on the range-based multilateral measurement localization method. Specifically, to generate the kth initial solution
In the gradient descent phase, we separately search for a near-optimal solution based on each initial solution. The update equation based on the kth initial solution is as follows:


The step size is chosen as
In the optimal selection phase, supposing that the near-optimal solutions obtained in the gradient descent phase are

5. Simulation Results
Using the MATLAB simulation platform, we perform some simulation experiments to evaluate the three different location methods described in this paper, RB-MML, MLE, and DB-MLE. In the experiments, we select the commonly used trilateration, that is,
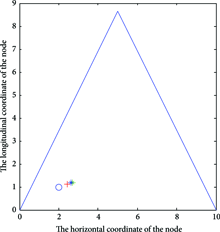
Figures2–5 show the influence of the different ranging random error parameters on the precision of localization. The error parameter represents the degree that the ranging error is affected by the measured distance since the ranging error affects the precision of localization directly. In all the figures, the x-axis indicates the horizontal coordinates of the node position and the y-axis indicates the longitudinal coordinate of the node position. The four figures present the localization effects of the three different localization methods when the error parameter takes four different values; that is,

Localization effect with
Localization effect with

Localization effect with

Localization effect with
From the figures, we can see that when
Figure6 shows the location errors of DR-MLE, MLE, and RB-MML, respectively, as σ varies. It is easy to see that although localization error increases in all the three localization methods, in general, localization error in DR-MLE is smaller than the other two methods. That is, our proposed method improves the accuracy of location.
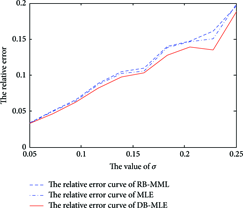
Localization error of the methods as σ changes.
Figure7 is the histogram of the relative localization errors of the three methods with different values of the communication radius R. As can be seen from the graph, when radius R is 15, the localization error is relatively small. But no matter how R changes, the relative error of DB-MLE localization method is always smaller than the other two methods with the second best one being MLE and the conventional range-based localization method exhibiting the biggest localization error.

The histogram of relative error with the communication radius of R changes.
In the last experiment, we deployed 50 unknown nodes and 10 anchor nodes randomly in a rectangular area of
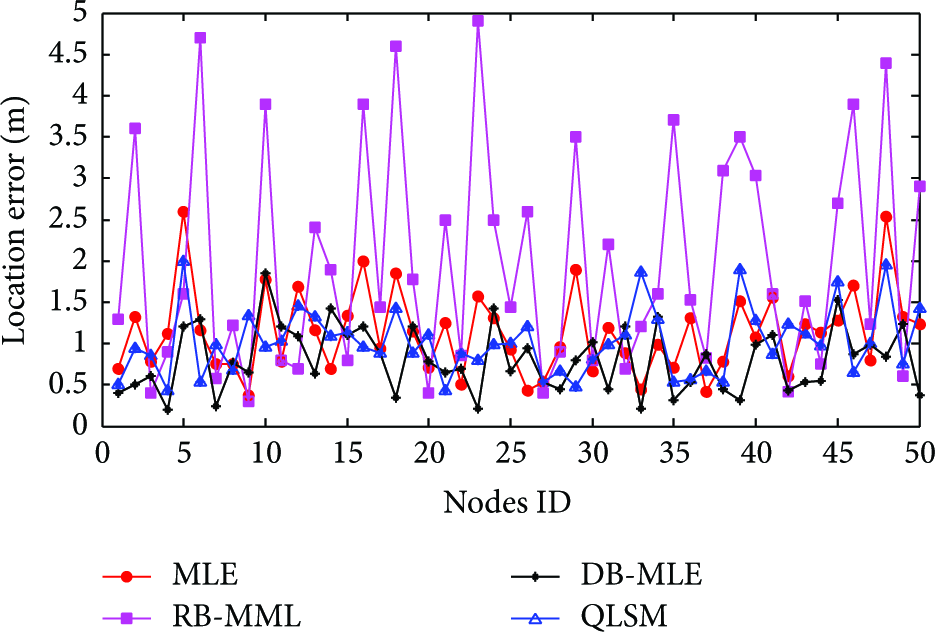
Localization error of the evaluated methods in a single instance of the experiment.

Average localization error in 20 experiments.
From Figures8 and9, we see that the localization accuracy of DB-MLE is a little higher than that of QLSM which is a little higher than MLE and RB-MML has the biggest average error. As far as the time complexity is concerned, QLSM runs much faster than DB-MLE though.
6. Conclusion
In this paper, we proposed a distance-based maximum likelihood localization estimation method called DB-MLE for node localization in WSNs. Unlike the traditional range-based multilateral measurement localization method, which does not consider the effect of measurement errors, and the traditional maximum likelihood estimation method, which assumes that the measurement errors are independent of the measurement distances, the proposed DB-MLE considers measurement errors that depend on the measured distances. Such assumptions are more suitable for practical distance measurement techniques, such as RSSI.
The optimization for DB-MLE leads to a complex nonconvex optimization problem. To solve the problem, we proposed two solutions based on the first-order optimality condition and the two-dimensional search. We evaluated the performance of the proposed methods through simulation experiment in which we also compared them to some existing localization methods. Simulation results showed that DB-MLE provides higher localization accuracy compared to the other methods.
Footnotes
Competing Interests
The authors declare that they have no competing interests.
Acknowledgments
The work presented in this paper has been supported by Beijing Natural Science Foundation (Grants nos. 4142008 and 4164089), National Natural Science Foundation of China (Grant no. 61272500), National High-Tech R&D Program (863 Program) (Grant no. 2015AA017204), and Shandong Natural Science Foundation (Grant no. ZR2013FQ024).