
Abstract
In practical RFID tracking systems, usually it is impossible that the readers are placed right with a “grid” structure, so effective estimation method is required to obtain the accurate trajectory. Due to the data-driven mechanism, measurement of RFID system is sampled irregularly; therefore the traditional recursive estimation may fail from K to
1. Introduction
Unlike Global Positioning System (GPS) applied in the outdoor cases, radio frequency identification (RFID) can effectively get more accurate indoor location information. So RFID has been widely used in the indoor tracking systems [1–3], especially in the Internet of Things (IoT) system [4]. Location information is one of the most important and frequently used contexts in many significant indoor tracking applications, such as asset tracking, industrial automation, goods management, supply chain management, and healthcare systems [5].
In the RFID system, once the tag gets close to the readers, the distance between the tag and readers can be extracted from the received signal strength information (RSSI), which follows a nonlinear relationship. Since the RSSI would be perturbed by some noise source, for example, the backscattered signal power propagated from nearby RFID tags, the measurement of RFID system is uncertain. And the data-driven mechanism leads to the irregular sampling interval.
Furthermore, the number of the sensors is also significant in the RFID tracking system compared to other multisensor systems. In order to measure the distance, some regular placement such as the “grid” structure [6] (shown in Figure 1) will make the trilateration estimation simpler and more effective. However, it is not feasible in most practical applications. For example, in the supermarket, the readers are often placed where not interfering customers’ shopping (shown in Figure 2). Therefore in the practical indoor tracking system, the distribution density of the readers is usually nonuniform. When the target gets into a reader-intensive area, several readers may obtain distance information simultaneously, while no or few measurements will be executed in a reader-sparse area.

Layout of square grid RFID reader network in [6].

A RFID reader/fixed items where RFID readers can not be installed.
In a word, measurements in the RFID tracking system have the following characteristics: nonlinear, uncertain, irregularly sampled, and multivariate. All these characteristics make the distance measurement in such kind of system quite novel and challenging.
In order to locate the target, at least three measurements were required [6] by trigonometry relationship. If the trajectory of target is of concern, different location points could then be lined to form the trajectory. However, the obtained trajectory might be inaccurate, because the location measured by RFID readers was with the measurement noise. In this case, filters were introduced to solve this problem. Considering the nonlinearity feature mentioned above, nonlinear filters were considered, like the representative EKF and UKF [8–12]. Reference [10] had developed a square-root unscented Kalman filter- (SR-UKF-) based algorithm to determine the real-time location of a moving target in an IoT environment, where there exist quantities of sensors, by which the good performance was shown in estimation of both position and velocity of the target with either uniform linear motion or variable-speed curve motion. In [13], a hybrid method which combines PF with Weighted Centroid Localization (WCL) was proposed to achieve high accuracy and low computational cost, but there existed some limit on the mobile speed.
Another reason possibly leading to an inaccurate trajectory is that sometimes not enough measurements could be obtained to locate the target in the sparse area with few readers. Therefore, effective estimation method was required to help complete the tracking process. A novel particle filter algorithm which used a moving direction estimation-based feature improvement scheme was proposed in [14] to enhance both relatively good accuracy and precision in passive RFID system, but there are requirements on distribution density of the tags which needs to be dense enough. Another related work could be found in [15], where a real-time portable RFID indoor positioning device and cost-effective scalable RFID indoor positioning infrastructure were demonstrated, based on Kalman-filter drift removal, Heron-bilateration location estimation, and four novel preprocessing/postprocessing techniques.
Due to the irregular feature of the RFID system, the traditional recursive estimation from K to
In authors’ previous work, an adaptive dynamic model was used, which can adapt the parameters of the system according to the dynamic features online [7]. Figure 3 depicts the structure of the system proposed in [7], including states estimation and update of the adaptive parameters and system model. In each step, the state was first estimated and the system parameters were updated on the basis of this; then the process was turned to the next step. Since the state estimation and update of the parameters and model were conducted alternatively, the process was actually in a serial mode.

The serial structure of the adaptive model and the estimating method proposed in [7].
However, for the RFID tracking system, the serial structure will result in the larger computing time cost and it will be difficult to carry out the online tracking. Therefore the parallel structure of the RFID tracking system should be considered. Reference [19] had developed a parallel structure for the adaptive model with its tracking, but the structure is actually a partial-parallel structure. Because the adaptive parameter is updated by the one-step-ahead prediction and the state estimation should be calculated before the updating adaptive parameter, the calculating time cost can not be shortened obviously.
Evidently, issues of filter, estimation method, and the model structure should not be considered separately. They all need to be carefully chosen to produce better performance. Therefore in this paper, a totally parallel structure for the RFID tracking system was designed, and two centralized fusion estimation methods were proposed based on the extended Kalman filter (EKF) and unscented Kalman filter (UKF), respectively. It needs to be pointed out that the dynamic model of the target was also taken into account in the estimation methods, which provide more accurate trajectory for the RFID tracking system. The advantage is obvious: (1) the proposed estimation methods can eliminate the disturbance of the measurement noise and (2) movement of the target could still be predicted when not enough measurements were available. The performance of these two algorithms, such as the tracking covariance and the calculating time, was verified and comparison with some existing methods was also given.
The following parts of the paper are organized as follows: Section 2 built the RFID measurement model and target dynamic model under the irregular sampling interval. Section 3 stated the estimation methods based on EKF and UKF, respectively. Simulation of the proposed methods was provided in Section 4. Finally, some conclusion was given in Section 5.
2. System Model with the Irregularly Sampled Measurements
First, measurement model of RFID needs to be confirmed before constructing the description model of the tracking system. The distance

Let


In general, the measured distance



According to the adaptive statistics model in [18], the system parameters of the horizontal and longitudinal axis are as follows:

For our tracking system, the models of the horizontal and the longitudinal axis are decoupled, so update of parameters can be carried out by each axis, respectively. Assume the estimated acceleration

Then we can use the relation equation
3. Tracking with Variable Number of RFID Readers
The parallel structure of the developed strategy was shown in Figure 4. After the

The parallel structure of the system.
3.1. EKF-Based Method
The general EKF method linearizes the nonlinear system by Taylor series method and then applies the Kalman filter to obtain the state estimates. It has obtained much interest because of its relative simplicity and demonstrated efficacy in handling nonlinear systems.
The proposed EKF-based tracking algorithm was implemented as follows.
(1) State Updating. It is as follows:







(2) Parameter Adaptation. Set the estimation of acceleration

When

3.2. UKF-Based Method
UKF propagates the so-called sigma points by function evaluations using the unscented transformation (UT), and this is at first glance very different from the standard EKF algorithm which is based on a linearized model. Suppose a set of points are constructed with a given mean and covariance. When another point with the same mean was added to the set, the mean of the set would be unaffected, but the remaining points would have to be scaled to maintain the given covariance. Then the following fusion estimation algorithm based on UKF was proposed.
(1) State Updating. By convention, let

The transformed set is given by instantiating each point through the processing model

The predicted mean is computed as
The predicted covariance is computed as

Instantiate each of the prediction points through the measurement model

The predicted observation is calculated by

The innovation covariance is

The cross covariance matrix is determined by

Finally, the update can be performed using the fusion estimation



(2) Parameter Adaptation (This Part is the Same as Step
4. Experiment Results
A 2D simulation platform of tracking system with RFID readers was developed to simulate the measurement mechanism, such as the measurement noise and the uncertainty of RFID readers discussed in Section 2. The relation of loss measurement is assumed to be detection rate inversely proportional to the distance to the RFID readers.
4.1. Performance of the Developed EKF and UKF Estimation Method
In this case, the two developed methods were compared to discuss the tracking covariance of EKF and UKF. Many researches have declared that the UKF gets better performance than EKF and this simulation will give a similar result.
The state of the target in the 2D space is
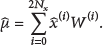
In this case, 19 RFID readers (coordinate points are shown in Table 1) were placed in the simulation platform and the measurement space of each reader with high detection rate was shown with circles (from inside to outside in contour map) in Figure 5. In the white area of the figure, the distance information of the target can only be obtained with low detection rate. The reference trajectory of the target is given with “black” asterisk in Figure 5.
The coordinate point of RFID readers.

The measurement space of RFID readers and the reference trajectory.
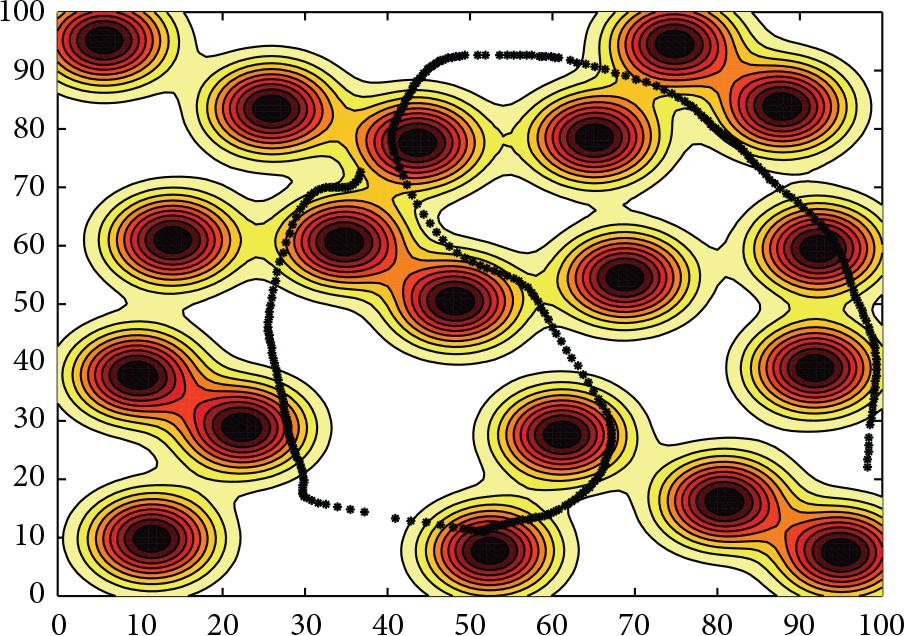
From Figure 5, we can see there are two low detection rate areas, which are circled by the black line in Figure 6 (with marked “①”). Table 2 gives the trajectory information in Figure 5 from 11.1 s to 12.1 s and “∖” means no measurements were obtained. From Table 2, it could be found that the sampling time is irregular, because no measurement data was obtained from 11.5 s to 11.7 s and from 11.8 s to 12.0 s. Moreover, because it was in the low detection rate area, only one measurement data is got at most times. Since the measurement got by RFID is the distance, it is impossible to infer the accurate target location with one measurement by the geometric relation [6]. However in this paper, the dynamic model of the target was used to estimate the trajectory when only few measurements can be obtained.
Measurements got by RFID readers system.

The reference trajectory and the estimated trajectory obtained by UKF-based method.
The EKF- and UKF-based methods were used to estimate the trajectory in Figure 5. With the UKF-based method, estimation covariance of the estimated trajectory is 43.7320 in the horizontal axis and 30.1378 in the longitudinal axis, and the estimated result was shown in Figure 6. Result obtained through the EKF-based method was given in Figure 7, and corresponding estimation covariance is 38.1563 and 44.8470. The estimated trajectories and errors in horizontal and longitudinal axes are shown in Figures 8 and 9, respectively.
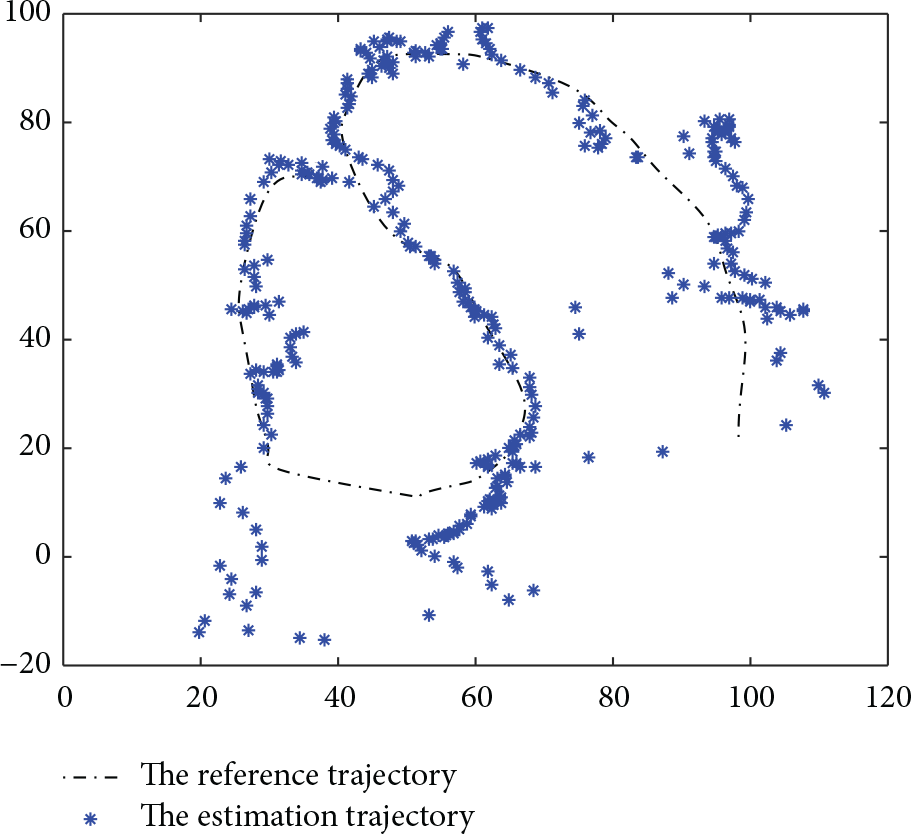
The reference trajectory and the estimated trajectory obtained by EKF-based method.

The estimations in horizontal and longitudinal axes by EKF and UKF.

The error of tracking by EKF and UKF.
From Figures 6, 7, 8, and 9, it could be seen that the estimation obtained by variable number of readers was smooth without mutation, even when the number of readers suddenly varied. Additionally, in the low detection rate area, the approximate movement direction of the target could also be estimated. Once enough measurements were obtained, the estimation error reduced rapidly. For the UKF-based method, this was achieved because the update process could continue with the estimated velocity and acceleration when there is lack of measurement data. However, the EKF-based method did not perform well in such area. The reason is that the nonlinear measurement model has been linearized, and some measurement information has been lost; therefore the estimation might not be that accurate.
4.2. Covariance Comparison with Trilateration Estimation
In this case, different 2D simulation trajectories were used to further verify the performance of the developed methods. Though hundreds of different trajectories were applied in the verification process, in order to show the results clearly, only nine of them were selected here as shown in Figure 10, each of which illustrates one simulated tracking system with several readers. The reference trajectory of each target is shown with “black asterisks” in the subfigures. The readers are placed in the center of each circle, which represents the measurement space of each RFID reader. Note that all the target trajectories are different from each other, and each of them has passed at least one sparse area.

Nine simulated trajectories to be tracked.
The previously mentioned trilateration estimation [6] was compared with the developed methods in this part, and results show that the developed methods perform better than the trilateration estimation especially in the system with sparse readers. The tracking covariance was defined as
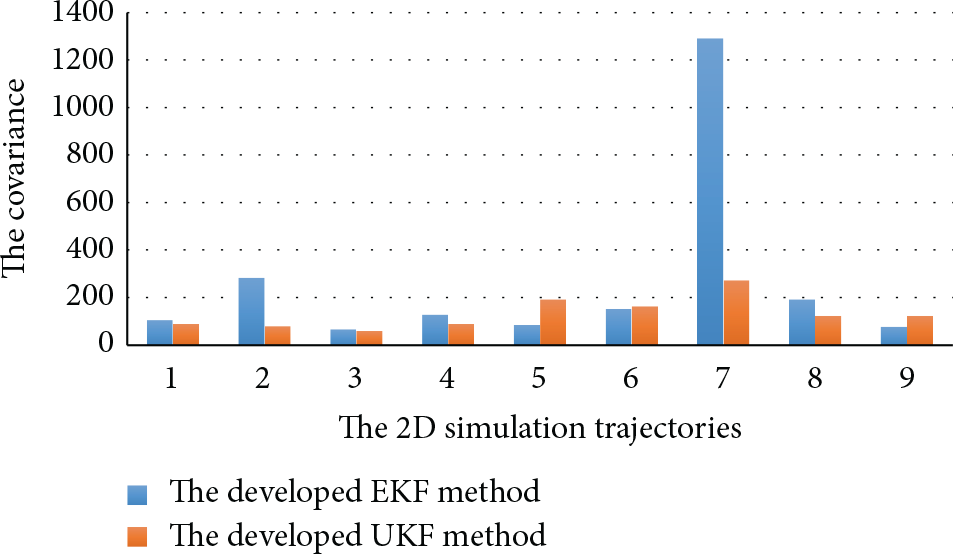
The covariance comparison of the developed methods UKF and EKF.

The covariance comparison of the developed method with the trilateration estimation [6].
It is clear that the covariance of the trilateration method is much larger than the developed methods. This is because at least three measurements were required by the method in [6], yet with sparse readers, not enough location information could be obtained. Therefore the estimation covariance of the trilateration estimation becomes large.
It also needs to be pointed out that the covariance of the UKF-based method was smaller than the EKF-based method for most trajectories (5 in 9, including numbers 1, 2, 3, 4, 7, and 8), and the biggest difference existed in number 7 trajectory. The reason is that the trajectory covered too much sparse area, and the performance of the estimation was affected due to the linearization.
4.3. Evaluation of Calculating Time of Three Different Structures
In this case, calculating time and estimation performance of three different structures were considered, including the serial [7], partial-parallel [19], and totally parallel structure developed here. Five methods are compared: the traditional EKF and UKF serial estimation methods [7], the partial-parallel UKF estimation method [19], and the newly developed EKF and UKF estimation methods. Evaluation results were shown in Figure 13, where the horizontal axes are the covariance and calculating time, respectively, and the longitudinal axes are both the sequence number of the nine simulated trajectories.

The comparison of the calculating time between different structures.
Judging by the algorithm type, the EKF-related methods cost obviously less calculating time than the UKF methods in Figure 13. If we consider the structure influence, the totally parallel structure costs less time obviously. So the developed EKF with totally parallel structure cost the least calculating time, which proves that the proposed method has high calculating capability.
5. Conclusions
It is necessary to consider the maneuvering target in the RFID tracking system. When the tag is within the RFID measurement space, the distance between the tag and readers can be extracted from RSSI. Because of the characteristics of the measurement process in the indoor RFID tracking system, the distances obtained by RFID are multivariate, irregularly sampled, uncertain, and nonlinear.
This paper has proposed the EKF- and UKF-based fusion estimation algorithms with the totally parallel structure, which update the model and estimate the state simultaneously online. The estimation covariance and the calculating time of the proposed methods are considered in detail. Simulation results show that, in most cases, the UKF method can provide better estimation performance, even when the target steps into the low detection rate area, while the EKF method with totally parallel structure cost the least calculating time and is suitable for fast online tracking.
Footnotes
Competing Interests
The authors declare no conflict of interests.
Authors’ Contributions
Xue-Bo Jin conceived the idea for the paper and contributed the theoretical analysis. Chao Dou implemented experiments and Ting-li Su wrote the paper. Xiao-fen Lian and Yan Shi gave some ideas for the paper, too.
Acknowledgments
This work is partially supported by NSFC under Grant no. 61273002, the Importation and Development of High-Caliber Talents Project of Beijing Municipal Institutions no. CIT&TCD201304025, the Key Science and Technology Project of Beijing Municipal Education Commission of China no. KZ201510011012, and Graduate Scientific Research and Ability Promote Project (BTBU 2015).