
Abstract
This paper proposes a cross-layer-based routing protocol for mobile ad hoc cognitive radio networks. The routing layer receives the spectrum-availability-related information from the medium access control layer and selects the next hop node on the route according to the spectrum information. This paper examines the expectation of channel switching in a range of scenarios and proposes a novel route selection method to mitigate the frequent channel switching. The proposed protocol distributes the routing overheads among secondary users in the network and prolongs the network lifetime. An extensive simulation was performed to evaluate the proposed approach, and the results showed that the proposed protocol extends the network lifetime and maintains a higher data delivery ratio.
1. Introduction
Protection of the primary user (PU) is the primary concern in cognitive radio (CR) networks. Therefore, secondary users (SUs) need to evacuate the channel immediately whenever the PU arrives on the channel. From the prospective of the routing layer, if a SU is in the active PU's area, it does not necessarily detour the route. Instead, the SU can change the channel, retaining the same route. Rerouting is only necessary whenever a link breaks between two nodes on the route and the link-break condition occurs when there is no common channel between the tagged node and next hop node.
Indeed, changing the channel according to the presence or absence of the PU is a medium access control (MAC) layer issue. The routing layer should focus on selecting the next hop node or complete the route to the destination. Some of the current routing protocols in the literature have not distinguished the routing and MAC layer issues clearly [1–3]. For example, in [1], Challenge-2 and Challenge-3, the author argued that if the PUs arrive on the channel, then the SUs also need to change the established route. However, this argument is partially true. First of all, the number of common channels available can be one of the factors affecting the selection of the next hop node for routing; it is not solely a routing layer issue. The route is not invalid (or the route is not broken) if a PU arrives on a channel currently used by a SU. If a PU is detected on the channel, the node (MAC layer) simply changes the channels. The route is invalid if the PUs occupy all the common channels between two nodes on the route. Cacciapuoti et al. [2] and Talay and Altilar [3] performed a similar assumption for the route invalidation.
In ad hoc cognitive radio networks (CRNs), the spectrum availability has a geospatial correlation. The incumbent spectrum available in a single geographical location might not be available in another geographical location. Therefore, it is necessary for cognitive radio ad hoc routing (CRAR) protocols to obtain the spectrum information from the MAC layer to calculate the route cost. To elaborate, the simplest scenario is described here.
Assume that there are four SUs in a single plane, the sender node (A), intermediate nodes (

Simple scenario of four-node ad hoc cognitive radio network.
This situation can be bad if the intermediate node needs to forward the packets for different destinations in different channels, as shown in Figure 2. The transceiver of node,

Multiple sources and destination scenarios.
Therefore, the channel switching delay due to frequent channel hopping can be mitigated if the spectrum-availability-related parameter can be included in the route cost.
2. Related Work
The reports of CR in the literature focused mainly on the physical (PHY) or MAC layer issues. The routing protocols for cognitive radio ad hoc networks have received less attention than other areas. Most routing protocols in the literature are an extension of multichannel routing protocols for ad hoc networks with the spectrum availability parameter. Nevertheless, there are several prospects, reviews, and position papers in the literature [4–7]. Cesana et al. [5] discussed the challenges and solutions in routing for cognitive radio networks. The authors categorized the cognitive radio routing schemes into full spectrum knowledge-based routing and local spectrum knowledge-based routing. They discussed several aspects of cognitive radio routing. Al-Rawi and Yau [6] discussed the challenges and categorized some of the cognitive radio routing schemes. Zhang et al. [7] classified and analyzed some of the existing routing protocols and compared their characteristics. Joshi et al. [8] also described some of the routing-related issues in cognitive radio wireless sensor networks.
Although many authors have not mentioned that their routing protocol is a cross-layer protocol [2–5], network layer receives information of available common channel from the MAC layer. Cacciapuoti et al. [2] proposed two versions of cognitive ad hoc on-demand distance vector (CAODV) protocols, which are an extension of AODV [9]. The first approach, called intEr-Route dIversity CAODV (ERI-CAODV), uses different channels for different routes, but each route is restricted to evolve through the same channel. The second approach is called intrA-Route dIversity (ARI-CAODV), which relaxes the constraint in ERI-CAODV that the same channel must be available in the entire route. In ARI-CAODV, intermediate SU sends the route a request (RREQ) in every idle channel.
Both approaches have several drawbacks. In both protocols, rerouting is initiated whenever a PU arrives on the channel. CAODV has a route error packet called the primary user route error (PU-RERR) packet, which is generated whenever a PU is detected on the channel currently used by SUs. The PU-RERR is broadcasted to the neighbors through the same channel occupied by the PU, which is a contradiction of the original principle of cognitive radio networks. CAODV does not take energy consumption into consideration. Further, in ERI-CAODV, finding the same channel in each link is not always possible. In ARI-AODV, sending RREQ in every idle channel is the waste of bandwidth resources.
Talay and Altilar [3] proposed a self-adaptive routing (SAR) protocol by extending the protocol by Cheng et al. [10] based on AODV. This protocol is an underlay approach that adjusts the transmission range of a SU whenever required and possible. This protocol assumes that all SUs are in the proximity of the minimum transmission range. The SAR assumes route failure if a PU is detected and attempts to calculate the distance between the PU and SU and adapts the transmission range. However, adapting the transmission range is difficult in a heterogeneous network. Therefore, this study compared the proposed protocol with the abovementioned ARI-AODV and SAR.
Most of the papers mentioned above did not consider the temporal variations of the spectrum availability. In some studies [11–14], the authors discussed the common control channel for routing-related packets (e.g., RREQ/RREP/RERR/RREP, etc.), but they did not mention clearly whether there should be an additional common control channel (CCC) compared to the general CCC used for the MAC layer control packets or the same CCC can be used for the routing packets. Generally, in CRNs, the CCC is necessary to inform of the arrival of the PU and negotiate for the data channels, which is a MAC layer issue. Some of the papers discussed above invalidate the route if the PU arrives on the channel. Invalidating the route is not really necessary upon the arrival of the PU on the channel, because there may be other idle channels available. This essentially is an MAC layer issue.
The remainder of the paper is organized as follows. Section 3 analyzes the estimated number of channel switching. The section validates one of the design parameters and explains why the selection of a common channel in the last hop and the next hop is necessary. Section 4 details the proposed protocol. Section 5 verifies the validity of the proposed protocol and Section 6 concludes the paper.
3. Analysis of Estimated Number of Channel Switching
To estimate the number of channel switching, the simplest scenario shown in Figure 3 was considered. Let h be the number of hops between the source and destination (end-to-end hops) and n the number of data channels for each link. This study assumed that all the channels were idle on each link for this case. The aim was to calculate the average number of switches needed to transmit a packet from the source to the destination. Let S denote the number of switches required. The term “smart-selection” refers to a method to select the same channel in each link to minimize the number of channel switches.

Scenario for the analysis.
Case 1.
Smart-Selection. If the same channel is selected in each link with the smart-selection on each link to minimize the number of switches, then

Random Selection. If the channels are selected randomly on each link, then

Case 2.
Assume that among n channels, m channels are occupied by the PUs (i.e., the channels are busy or in use). That is, there are
Smart-Selection. The channel on each link is selected so that the same channel can be used on as many hops as possible from the source node. Let X be the maximum number of hops that can go without switching.
Let us consider the range of X for the proposed scheme. If the number of hops between the source and the destination is h, then X has an upper bond of h. X will have the minimum value when m channels on the ith link are selected to minimize the overlapping between the channels on the ith link and the set of channels selected in the previous links. Thus the lower bound of X can be represented as


Random Selection. If the channels are selected randomly on each link, then
Thus, the following can be obtained:

It can be observed that (6) is identical to (2). The reason is that if m busy channels are selected randomly on each link and one channel for a new connection is selected randomly from the remaining
Let us compare (4) and (5) for large n and small m, particularly when


Equation (8) means that when the channels are selected randomly, switching is likely to occur on every link as the number of channels (n) becomes large.
Equation (7) is a special case of (4), obtained especially for

That is,

Illustration of the condition that guarantees no switching on an end-to-end path under the proposed channel selection scheme.
4. Proposed Routing Protocol
From the analysis, it was observed that channel switching can be mitigated considerably with the smart-selection. Therefore, this study proposes a cross-layer-based cognitive radio routing (CLC-routing) protocol. The proposed protocol hereafter is called CLC-routing. This protocol receives channel availability-related information from the MAC layer and selects the next hop node, which has a common channel as the previous link. The proposed protocol also prolongs the network lifetime by distributing the routing workload among the SUs.
The Proposed Protocol Has the following Properties
It does not detour if the PU arrives on the channel; rather it tries to hop the channel and invalids the link only if all the channels are occupied by the PU. It tries to select the same channel that is selected in the previous link, so that no channel switching is needed to receive and forward a packet. It selects a route with the cost considering spectrum availability, battery capacity of SUs, and length of the route. It distributes the routing overload among the nodes in the networks by invaliding the route.
Advantages of the Proposed Protocol
Extending the network lifetime. Decreasing the MAC layer delay. Mitigating frequent rerouting.
4.1. Protocol Description
In this work, the well-known dynamic source routing protocol for multihop wireless ad hoc networks is extended [15], and a cross-layer protocol that obtains the spectrum-related parameter from the MAC layer and selects the next hop is proposed. The predictive MAC (PMAC) protocol [16] was used to receive the channel information. The PMAC maintains the channel status table and predicts the PU's arrival on the channel. The protocol also ranks the channel from the best channel to the worst channel according to a range of factors. The proposed protocol calculates the cost of the route considering (i) the number of available common channels, (ii) the residual battery of the SU, and (iii) the number of hops. The cost of a node according to the residual battery can be calculated as in the following:

4.2. Route Discovery
A SU node that has packets to send begins broadcasting a route request (RREQ) packet. The RREQ contains channel information of the link
Once an intermediate SU receives a RREQ packet, the SU rebroadcasts the packet if (a) the SU has no route to the destination in its cache, and (b) it has not already broadcast the RREQ with the same sequence number and sender ID. Otherwise, the SU drops the RREQ. Each intermediate SU calculates the link cost from its own

When an intermediate SU node receives a RREQ packet, it starts a timer and keeps the cost in the header of that packet as the minimum cost (
4.3. At the Destination SU Node
After the first packet destined to it is received, the SU starts the timer and waits for the other RREQs. After the timer expires, the destination SU compares the route. The SU generates a route reply (RREP) with the route with the minimal cost. The route cost is calculated using the following:

4.4. Route Maintenance
The route in the CR ad hoc networks is more prone to breaking than ad hoc networks because the PUs can occupy the channel anytime. When all common channels are occupied by PUs and no common channel is available between two intermediate nodes, the node has to generate a route error (RERR) packet. The other reasons to start the route maintenance are energy depletion and node mobility, as in the conventional ad hoc networks.
SUs generate RERR message immediately if the number of common channels available is zero for the next hop. On the other hand, if the cost difference between current cost
This strategy of generating a RERR considering the difference between the current cost
5. Simulation Results
In the present work, for the simulation, the ns-2 [17] was extended for ad hoc cognitive radio network scenario. The network consists of 80 SUs and 20 PUs confined in 1000 × 1000 m2 area. The transmission range of each node is assumed to be 50 m. Six flows of CBR traffic are generated over the UDP at various data transmission rates from 100 kbps to 1 Mbps. The packet size is 512 bytes. A limited node mobility of 5 m/sec was used to evaluate the protocol's performance. The number of licensed channels available for the opportunistic use was set to 10 and one additional control channel (i.e., CCC) for the MAC layer control packets exists. The additional CCC is free from PUs packets and is only used for the MAC control packets of SUs. PUs use an ON/OFF arrival model. As described in the protocol description, the PMAC was used as a MAC layer protocol. PMAC requires two transceivers: one for the data channels and one for CCC. Most of the MAC layer parameters from the PMAC were used. The time is divided into beacon intervals of 100 ms, where 20 ms is for channel negotiation and 80 ms is for the data packets. The simulation runs for 10,000 seconds. Each simulation is run 10 times and the averaged values are presented in the graphs.
The SU lifetime, packet delivery ratio, throughput, and end-to-end delay were examined as the quantitative metrics for evaluating the performance of the proposed protocol. No de facto standard routing protocol exists for cognitive radio networks to compare with the proposed protocol. Therefore, this study compared the proposed CLC-routing protocol with the CLC-routing without selecting the channels randomly in each link (we call it CLC-routing-random), ARI-AODV [2], and SAR [3]. Although ARI-AODV and SAR both were cross-layer approaches, they did not mention details of the MAC protocols they used. This was modified slightly to make it compatible. Therefore, the result can be different from the original paper.
Figure 5 shows the number of dead nodes with and without spectrum information. In the evaluation, a node is dead if it has a battery power less than five percent of

Number of dead nodes with and without spectrum information.
Figure 6 shows the packet delivery ratio. This was calculated as the number of packets received by the destination divided by the number of packets that originated from the source. The results show that CLC-routing achieves a higher packet delivery ratio than the remaining simulated protocols. The reasons include frequent rerouting because of the network partitioning caused by energy depletion, route invalidation, even if channels are available in the intermediate nodes in SAR and ARI-AODV, frequent channel switching in CLC-routing-random due to random channel selection, and a lack of cooperation with the MAC in a cross-layer approach.

Packet delivery ratio.
Figure 7 shows the aggregated throughput of the CLC-routing, CLC-routing-random, SAR, and ARI-AODV. Aggregated throughput was calculated as the average rate of successful packet delivery over six communication flows. Because of the less rerouting, less network partitioning, and less channel switching, CLC-routing achieved a higher throughput than the remaining three approaches. Because the size of outgoing packet queue is fixed in the simulation, SUs cannot deliver all the packets generated with higher traffic flow. Therefore, the protocols with higher network partitioning and frequent channel switching achieve a lower aggregated throughput.

Network throughput in various traffic rates.
Figure 8 compares the average end-to-end delay. The average end-to-end delay was calculated as the average time between the transmission of data packets at the source SU and the successful reception of the packet at the destination SU. This is because higher CBR traffic rate generates more interference, so the end-to-end delay increases. SAR and ARI-AODV have a higher average end-to-end delay because they invalidate the route and reroute frequently. Although this study considered two transceivers, one transceiver was dedicated to the CCC and the other transceiver (called data transceiver) was only used for data transfer. If the data receiving channel and data sending channel are different, then the average end-to-end delay increases because of the frequent mandatory channel switching.
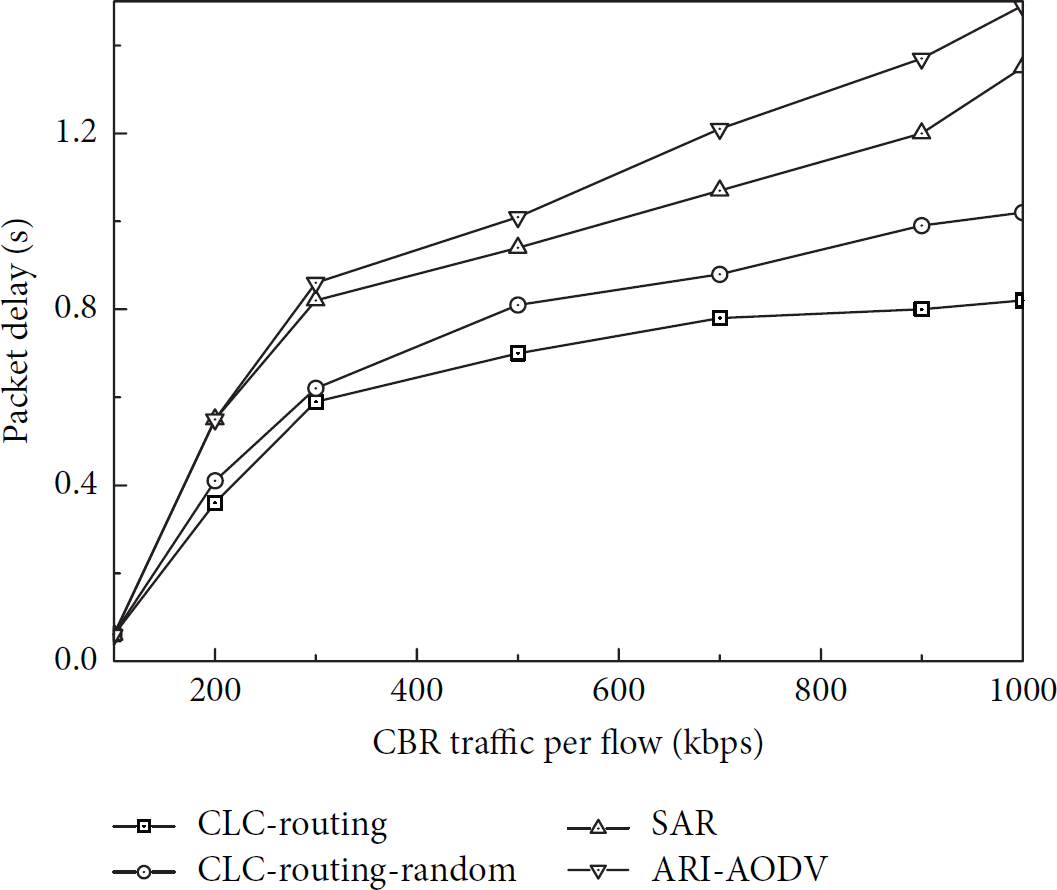
Average end-to-end delay in various traffic flows.
6. Conclusion and Future Works
This paper presented a cross-layer-based cognitive radio routing protocol for cognitive radio networks. Because rerouting is expensive in terms of energy, delay, and throughput, it is better to select a route in such a way that requires less channel switching. Excessive workload on a particular node causes network partitioning and induces repeated rerouting. The proposed protocol incorporated power awareness and spectrum information with a cross-layer approach. Future work will introduce fuzzy-logic-based channel selection.
Footnotes
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Acknowledgment
This work was supported by the 2015 Yeungnam University Research Grant.