
Abstract
Vehicular Ad Hoc Networks (VANETs) are autonomous and self-configurable wireless ad hoc networks and considered as a subset of Mobile Ad Hoc Networks (MANETs). MANET is composed of self-organizing mobile nodes which communicate through a wireless link without any network infrastructure. A VANET uses vehicles as mobile nodes for creating a network within a range of 100 to 1000 meters. VANET is developed for improving road safety and for providing the latest services of intelligent transport system (ITS). The development and designing of efficient, self-organizing, and reliable VANET are a challenge because the node's mobility is highly dynamic which results in frequent network disconnections and partitioning. VANET protocols reduce the power consumption, transmission overhead, and network partitioning successfully by using multicast routing schemes. In multicasting, the messages are sent to multiple specified nodes from a single source. The novel aspect of this paper is that it categorizes all VANET multicast routing protocols into geocast and cluster-based routing. Moreover, the performance of all protocols is analyzed by comparing their routing techniques and approaches.
1. Introduction
MANETs are gaining a lot of attention due to its promising applications in different fields where development of infrastructure is not feasible. MANET is a self-configurable network in which nodes communicate wirelessly. These nodes act as routers and data terminals for communication according to the requirements of the network. VANET is considered as the subset of MANET including all the features of the MANET. It is very expensive and difficult to install huge infrastructure on all roads and highways for intervehicle communication as shown in Figure 1. The quick installation of ad hoc networks without involving any central authority or administration is another promising advantage of VANET [1].

VANET applications and transmission strategies.
VANET develops the ITS based upon latest communication technologies to provide convenience, safety, and accuracy while driving. ITS has made the traffic system more efficient and secure as compared to the traditional traffic management system. The first generation of ITS was created in 1991 in the United States after considering severe loss of life in road accidents. The aim of developing ITS was to bring the latest technology into the existing traffic system to reduce accidents and improve road safety. As a result, the first generation of Dedicated Short Range Communication (DSRC) system was developed for commercial vehicles which operate at 915 MHz with transmission rate of 0.5 Mb/s. The commercial vehicles used DSRC system to pay toll only. In 1997, the ITS at United States demanded bandwidth of 75 MHz from Federal Communication Commission (FCC) to develop advanced technology for traffic system [1, 2].
In the Second Generation of Dedicated Short Range Communication (DSRC), the FCC has allocated the band of 5.9 GHz (5.85 GHz to 5.925 GHz) with the bandwidth of 75 MHz in 1999 [2]. The project aim was to develop reliable communication among vehicles to receive information regarding weather, accidents, traffic, congestion, and so forth. Moreover, there are no charges to access the open standard DSRC 5.9 GHz band which reduces its overall implementation cost. The aim of band allocation is to reduce the road accidents by using VANET. DSRC is also recognized as Wireless Access in Vehicular Environments (WAVE) [1]. The comparison between different wireless technologies shows that DSRC is more appropriate for the VANET environment as shown in Table 1.
Comparison between wireless technologies [1].

There are two types of DSRC devices which are used for VANET communication. These devices are road side unit (RSU) and On Board Unit (OBU). OBUs are installed in vehicles along with omnidirectional antennas to access wireless channel while RSUs are the stationary devices installed along the roads and highways with functionality similar to OBUs. The general architecture of RSUs consists of an antenna, processor, and multiple sensors to facilitate communication among vehicles [1].
The novelty of this paper lies in reviewing and classifying all VANET multicast routing protocols. It is difficult to rank the performance of all reviewed protocols at this stage because these are developed for different environments and scenarios. Therefore, all protocols are arranged under geocast and cluster-based category based on the approaches and techniques used in these protocols.
All protocols are based upon various schemes to achieve the desired results as shown in Figure 2. These schemes are developed for the specific VANET scenarios according to desired requirements. All approaches are compared in this paper to provide a complete understanding of each scheme and their behavior in various environments. This understanding will pave the way for further research of developing different communication models in VANET multicast routing protocols. Another novel aspect of this paper is that it includes new technical trends introduced in VANET multicast routing such as spatiotemporary scheme, geographical multicasting at highways, and store and forward scheme, as shown in Figure 2.
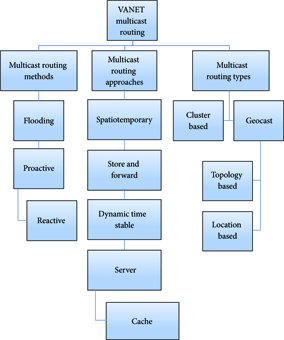
VANET multicast routing classification.
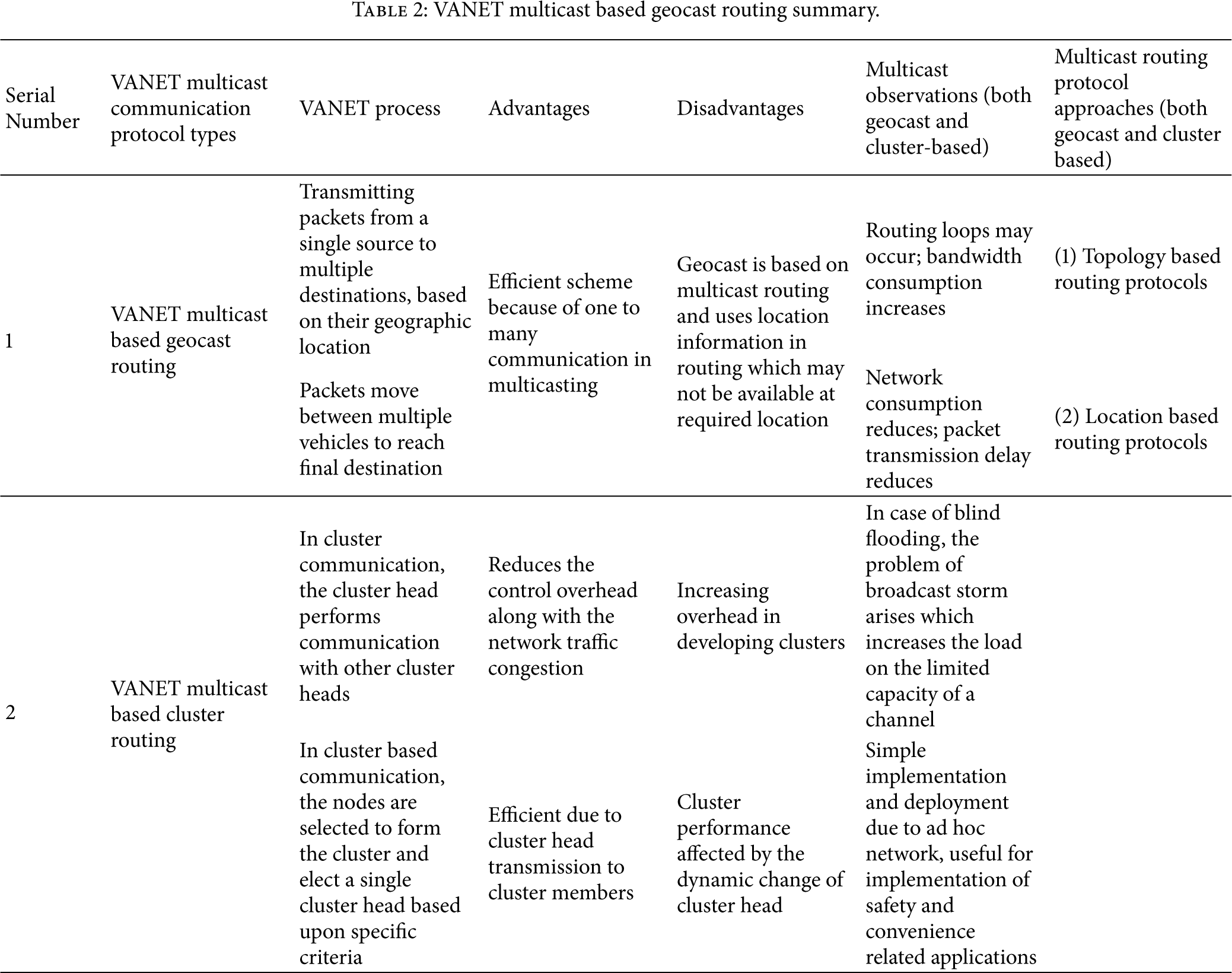
The remaining paper is organized as follows. Section 2 first introduces VANET multicast routing, including methods and approaches. In Section 3, a basic research upon VANET multicast routing classification is made. Then, in Section 4, all multicast routing protocols are reviewed in detail. Besides this, VANET routing strategies, approaches, classification, advantages, and disadvantages are also analyzed in this section. In this section, the tabulated summaries of routing protocols are also presented in Tables 2 and 3. Finally, in Section 5, the conclusion is drawn. The future work is discussed and suggested in Section 6.
VANET multicast based geocast routing summary.
Existing VANET multicast routing protocols comparison.

G: geographical; C: cluster-based; S: spatiotemporary; I: infrastructure; BL: beaconless; BB: beacon based; R: reactive; SF: store and forward, map based; L: location based; T: topology based; Rl: real time; Y: year; ND: not determined.
2. VANET Multicast Routing
Multicast routing protocols are the most active research area due to their efficiency and mobility within a dynamic environment like VANET. Multicasting reduces the power consumption, transmission overhead, and control overhead by sending multiple copies of messages to various vehicles simultaneously. In multicast routing protocols, messages travel from a single sender to multiple destinations or towards a group of interested nodes. In case of VANET multicast routing protocols, messages are transmitted to group of intended vehicles. Multicast routing methods are classified as flooding, proactive, and reactive approach as shown in Figure 2 [3].
In flooding, the messages are broadcasted across the network like a chain reaction. Every node sends the message to all its neighbors except the sender. The messages broadcasting can be limited within the desired geographical area. Therefore, the nodes rebroadcast the message only when they lie within a specified geographical area. The flooding algorithm is simple to implement which delivers messages reliably. Flooding consumes a lot of bandwidth and power due to redundant messages which increase the network load and traffic congestion. The message redundancy causes collision in a network which results in packet loss.
In Proactive Approach, the routing information is stored in routing tables by precomputation of routing paths. These routing tables are maintained and updated periodically for distribution of routing information across the network. In this approach, the shortest path is adopted for routing without route discovery. The routes are updated and maintained at regular intervals irrespective of their usage. Therefore, only partial information is required to maintain the routes which reduce bandwidth consumption and latency. It is suitable for real time applications due to its low latency. On the other side, the overhead increases due to maintenance of unused routing paths which occupies a lot of bandwidth. The complexity of maintaining routing tables continues to rise in large networks. This approach does not respond to any kind of link failure within a network.
The third main category is Reactive Approach in which the paths are calculated on demand. It is based on query-response mechanism. The connection is established between the sender and desired receiver only when the query reaches that receiver. In this approach, the routes do not need to be updated after regular intervals because these are established on demand. Therefore, there is no need to maintain routing tables which reduce the network traffic, overhead, and complexity. Similarly, the bandwidth consumption also reduces because reactive approach is beaconless. This approach responds to any kind of link failure within a network. It has high latency because the routes are discovered on demand.
MANET multicast routing protocols are unable to execute well in VANET because the topology changes continuously as the vehicles move unpredictably. Therefore, it is also difficult to reduce the bandwidth and power consumption due to high mobility in VANET. All these issues have made the VANET multicast routing extremely challenging. The aim of developing multicast routing methods in VANET is reducing the transmission overhead, maintenance of adaptable topology, avoidance of loop formation, and reducing processing load [3].
3. VANET Multicast Routing Protocols Classification
VANET multicast routing protocols use various schemes for routing messages depending upon the requirements of VANET scenario. These schemes are shown in Figure 2 and their basic functionality is discussed in this Section. The schemes will be explained along with their routing protocols, advantages, disadvantages, and applications in Section 4.
In spatiotemporal scheme, the messages are transmitted to other vehicles at only assigned time, which is specified by the sender. In this approach, all the transmissions are restricted by time. The time factor can be combined with various types of events. If this scheme is combined with geocast then the transmission is performed at specified time upon vehicle entrance at a desired geographical location called a Zone of Relevance at time “t” (

Spatiotemporary scheme within ZOR at time “t.”
The messages can also be stored at RSUs and delivered to vehicles at the required time. Similarly, server approach is also used for delivering messages to vehicles at desired time within specific ZOR. The time factor can also be set in such a way that the vehicles will keep receiving messages at the destination for a specified time period. The time factor for message transmission is required in many scenarios like position based advertisements and location based announcements. Another application of this scheme is to disseminate the traffic guidance, warning signs, and weather updates to vehicles at specific time and within a desired geographical region [4]. The protocols based upon this approach are Mobicast routing protocol [5, 6] and Abiding Geocast [7] which will be discussed in Section 4.
In store and forward scheme, the messages are stored by vehicles and delivered to other multiple vehicles reliably upon triggering the required event. The event for message delivery can be expressed as to deliver messages upon vehicle entrance at desired geographical location or upon finding the destination vehicles. This scheme has a robust performance in sparse and dense environments because its functionality is not affected by vehicle speed. The geocast messages are delivered to all vehicles within a specified region which is called a ZOR. The vehicle V1 starts sending the message upon finding V2, V3, and V4 within ZOR as shown in Figure 4. The geocast messages can also be stored on servers or in infrastructure based system to deliver messages to all vehicles which lie within ZOR. Similarly, the event can be triggered upon finding the desired RSUs. In case of network partitioning, it is necessary to store the message and deliver upon finding the specified vehicle. Similarly, it can also be applied where the node speed is very high which results in continuous change in the neighborhood [4].

Store and forward scheme within Zone of Relevance.
Store and forward scheme also performs route repair by storing the message within intermediate nodes upon detecting a link break. The intermediate nodes store the message and send a route request (RREQ) to the destination nodes. The destination acknowledges the intermediate nodes by sending a route reply (RREP) upon receiving RREQ, to repair the route successfully. Otherwise, the intermediate nodes send route error (REER) to source upon failure to find destination as shown in Figure 5 [8].
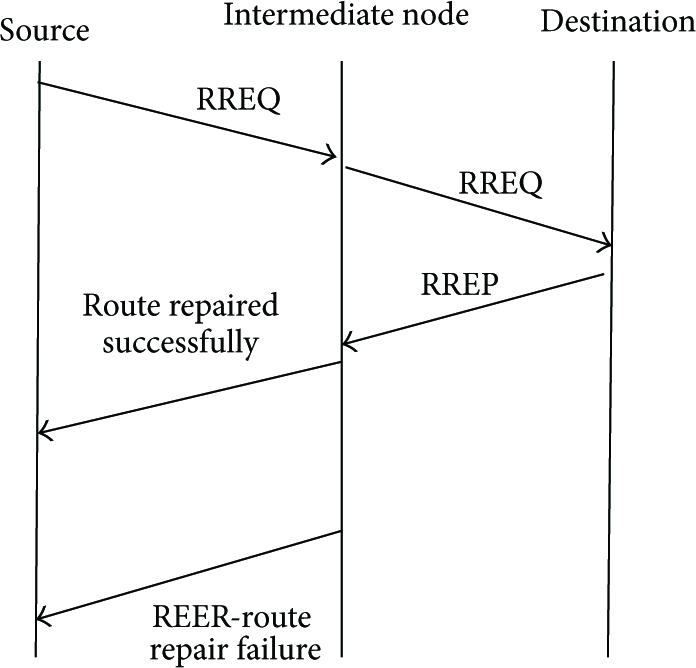
Route repairing within store and forward scheme.
The protocols based upon this approach are IVG [9], Cached Geocast [10], Abiding Geocast [7], GvGrid [11], DRG [9], CBDRP [8], and Constrained Geocast [12].
In dynamic time-stable technique, the time of packet delivery can be varied dynamically according to nodes movement. Hence, the message delivery time is adjusted at real time, according to the (high or slow) speed of vehicles. This approach is useful in urban traffic scenarios where vehicles move with different speeds. The example of this approach is DTSG [13–15].
Server approach is used in two modes which are infrastructure and infrastructureless mode. In infrastructure mode, the messages are delivered to vehicles by using servers at road side units. In infrastructureless mode, the message is stored in the vehicle which acts as a server. The vehicle delivers messages upon triggering of an event. The event can be triggered upon finding the destination vehicle or desired geographical location. The example of this approach is Abiding Geocast [7].
In cache approach, the information is stored in cache and delivered to incoming vehicles upon desired event occurrence. The event can be triggered upon finding the desired geographical location or specified by the sender according to the requirement. Hence, the messages are retrieved from cache rather than fetching from several other nodes to reduce the network overhead. The example of this approach is Geocache [16] and Cached Geocast [10]. All these approaches will be further explained in Section 4. VANET multicast routing protocols are further classified into geocast and cluster-based routing as shown in Figure 7.
3.1. Multicast Based VANET Geocast Routing Protocols
Multicast based VANET geocast routing protocols use location information for route establishment. Therefore, this approach aims to deliver messages from a single source to multiple destinations within a specified geographical location, which is called a ZOR and the area next to ZOR is a Zone of Forwarding (ZOF). In ZOF, messages are directed towards specified nodes rather than flooding of packets to all nodes of the network. Therefore, ZOF strategy reduces the control overhead and network traffic congestion during message dissemination [17, 18].
Multicast based VANET geocast routing protocols are useful for achieving safety and convenience during driving [19]. These routing protocols also provide scalability within VANET. Multicast based VANET geocast routing protocols are further categorized as topology based and location based.
Topology Based Approaches. In this approach, the forwarding nodes are selected according to the designed topology which can be multicast tree or multicast mesh topology. All nodes of topology are aware of the complete network layout and links to forward packets. Topology based protocols use reactive, proactive, and hybrid approaches according to the network requirements and protocol design. The example of this approach is Robust Vehicular Routing (ROVER) protocol [20] which will be explained in Section 4 and summarized in Table 2 also [21]. Location Based Approaches. In this approach, the routing decisions are based upon the location of the sender, receiver, and neighboring nodes. The location of nodes is determined whenever the forwarding nodes are selected for transmitting packets. In this scheme, there is no need to maintain any multicast tree because the forwarding nodes are selected based on the location information. Hence, it reduces the overhead of maintaining multicast trees. Intervehicles Geocast (IVG) [9], GvGrid [11], Distributed Robust Geocast (DRG) [9], and Dynamic Time-Stable Geocast Routing (DTSG) [13, 14] protocols are commonly used location based approaches.
3.2. Cluster-Based Routing Protocols
Cluster-based routing behaves efficiently in multicast communication. All nodes of the network are arranged in virtual groups, called as clusters. Each cluster has a cluster head, which is elected upon several parameters like mobility, position, behavior, node degree, nodes ID, and so forth. The remaining nodes of a cluster are called cluster members. The organization of cluster heads (CH) and cluster members (CM) is shown in Figure 6. Cluster head is responsible for communicating with cluster members and other cluster heads. Therefore, the network overhead is reduced by dividing the network load into two phases. In the first phase, the cluster head communicates with cluster members and in the second phase, cluster head communicates with other cluster heads. Hence, it is concluded that the network load is directly proportional to the number of clusters in the network [22, 23].

Nodes organization within cluster-based routing protocol.

VANET multicast routing protocols.
4. VANET Multicast Routing Protocols
All VANET multicast routing protocols based on geocast and cluster-based types are reviewed and organized hierarchically as shown in Figure 7 and the comparison is shown in Table 3. All these protocols are discussed here in detail along with their aims, functionalities, advantages, disadvantages, and applications in various scenarios.
4.1. IVG: VANET Intervehicles Geocast Protocol
IVG [9, 28] protocol is used for the distribution of safety messages to multiple vehicles on the highway about an accident or any obstacle. Multiple messages are transmitted to a group of vehicles at the same time called multicast group. The protocol is developed especially for achieving secure, efficient, and reliable communication for intelligent transport system. This protocol aims to inform the vehicles about the risk which lies in the emergency area. The multicast group for message dissemination is selected according to the risk factor in that area. The risk factor is found by considering driving directions and position of multiple vehicles. The damaged vehicle transmits the messages to a multicast group. All the vehicles which lie within the risk area transmit messages to furthest nodes. Therefore, all the incoming vehicles are informed about the risk factor, if they are approaching the risk region.
Advantages. This protocol reduces the number of hops by using multicast group for message dissemination.
The network fragmentation is reduced by periodic broadcasts. The time of rebroadcasting is calculated according to the speed of vehicles to improve protocol efficiency. The simulation results show that this protocol is also scalable and reliable after testing in various environments.
Disadvantages. Vehicles belonging to the risk area are informed by periodic transmission of beacons. As a result, the transmission overhead increases. Similarly, the number of multicast groups also increases within congested traffic, which results in more transmission delay [28].
4.2. Cached Geocast
In this protocol, cache is introduced to forward geocast messages. The cache is added at the routing layer for storing geocast messages. If suitable neighbor is not found, then the geocast messages are saved into the cache. The cache also contains those unforwardable or unroutable messages, which result due to network partitioning. The messages are forwarded upon finding the required neighbor node. Sometimes, the desired destination node is not registered in the table. Therefore, the messages are saved in a cache and forwarded upon the registration of the required node.
This protocol is developed especially for applications like virtual warning signs at highways. Hence, the messages are delivered to all vehicles which lie within the desired geographical area rather than communicating with individual vehicle only.
Advantages. The network disconnections arise due to network partitioning. These network disconnections are reduced in this forwarding scheme by storing the messages in the cache. The stored messages are delivered, if the next hop (suitable neighbor) is found. Otherwise, the messages are kept in cache. The neighborhood selection mechanism is also improved to reduce the network load and delay [10].
Disadvantages. The record of neighboring nodes is maintained in the form of tables which increase the transmission overhead. The cache is updated in case of any neighboring node joining, leaving, or changing in its position. Similarly, it requires additional time in storing, retrieving, and maintaining the messages in cache [10].
4.3. Abiding Geocast
Abiding Geocast is a time-stable protocol, which delivers messages within a desired geographical area at a specified time. This protocol consists of three approaches for message delivery. In the first approach, the server saves the messages locally and delivers upon finding the desired vehicle. The server storage can be infrastructure based. In the second approach, the node is elected from assigned geographical region to deliver periodic messages to all vehicles which enter into that region. In the third approach, the node at destination is elected as server for storing the geocast messages and delivering to all vehicles which enter into that region at specified time. The process of electing node for server is also based on specific criteria as mentioned in the algorithm of Abiding Geocast protocol. Similarly, the handover procedure of server to another node is also described in this protocol. All the messages are saved on the server for a limited lifetime period. In this protocol, bandwidth is saved by avoiding blind periodical retransmissions because the messages are delivered at a specific time period and within a desired geographical region. This approach has applications in VANET like advertisement and information dissemination about any accident at highways. It also informs about the present state of the road like slippery conditions, traffic congestion, snow falling level, and so forth.
Advantages. All messages are stored on the server before transmission which results in reducing the overall network load. This protocol does not require periodic beaconing system because geocast messages are broadcasted periodically [7].
Disadvantages. The packet loss and latency is high in abiding upon comparison with other approaches because saving and retrieving from the server take extra processing time [29]. This protocol lags in reliability also because the message delivery scheme by electing server at the destination is a complex process. Therefore, the reliability issue has not been discussed in this protocol. Besides this, there is also an issue of assigning limited lifetime to already stored messages on server. If messages lifetime is short, then new nodes will not be able to receive the messages [7].
4.4. GvGrid
GvGrid [4, 23] is a Quality of Service (QoS), on-demand VANET routing protocol. It is based upon reactive approach and uses the position of nodes for routing. The aim is to provide robust and high quality route for communication among vehicles and vehicles to roadside communication.
It divides the map into a grid of equal size squares and uses neighbor and the route selection algorithm for routing. The nodes find the next hop from its neighboring grid and select those vehicles which are moving with almost the same speed and direction. Simulation results of GvGrid show that the routes lifetime is longer than other existing VANET routing protocols. This protocol is not suitable for highways where vehicle speed is high because it is designed especially for congested traffic.
Advantages. It does not develop new routes on broken links. It excludes the broken link and complements the missing node by another one. Therefore, it recovers the route efficiently and quickly rather than searching the whole network for new routes. It finds the alternate nodes against missed nodes successfully. Therefore, route lifetime becomes longer along with the improvement in packet delivery ratio [11].
Disadvantages. The efficiency needs to be improved within a dynamic, dense, and practical scenario because the complexity increases in developing alternate routes. Therefore, the communication delay rises within various routes of the network.
4.5. DRG: Distributed Robust Geocast
DRG [4, 9, 30] is developed upon distance based back-off algorithm. Therefore, this protocol is adaptable in dynamic environments, handles frequent topology changes, and reduces the number of hops. It is based upon a completely distributed approach in which the messages are kept alive at the destination to ensure the reliable delivery of messages. Therefore, new nodes entering into that region can also receive messages.
DRG reduces the number of redundant transmissions because the nodes do not rebroadcast the message until their distance from sender exceeds the specified value. The transmission is divided into two regions called ZOR and ZOF. The coverage area of the sender is classified as ZOR in which the vehicles can receive the messages from the sender. ZOF consists of those nodes which can forward the geocast messages reliably to next nodes, which are within Region of Interest (ROI); otherwise messages are dropped. This protocol has applications for reliable delivery of emergency messages within a specified geographical region.
Advantages. In this protocol, network fragmentation is avoided by scheduled retransmissions and by using ZOF approach. It does not exchange beacons periodically, which reduces network load. The packet delivery ratio rises in well-connected and dense networks by using the ZOF.
Disadvantages. The network overhead and delay rise by increasing the packet delivery ratio because more geocast messages are kept alive for long durations at ZOR.
4.6. ROVER: VANET Robust Vehicular Routing
ROVER is categorized as multicast geographical protocol. It is developed mainly for providing reliable routing techniques for communication among vehicles. In rover, the message communication consists of two phases. In the first phase, only control packets are broadcasted within ZOR. These control packets are flooded using reactive (on demand) approach. In the second phase, the data packets are unicasted. This protocol uses location information, maps, and identification number for routing. The source node finds the route by broadcasting a request along with its source ID, location, and Zone of Relevance. The vehicle accepts the packets when it is closest to source node or it is within the Zone of Relevance or Zone of Forwarding. Only those vehicles reply upon control packet reception, which are within the range of ZOR or ZOF. When a vehicle accepts the packet, then it replies along with its ID and one hop neighboring vehicle ID. The receiver saves the routing information (contained in the request) into its routing table and retransmits the packet [21, 25]. The source nodes develop a multicast tree through this process for routing data packets.
Some of the nodes broadcast messages multiple times unnecessarily, which are near to sender. This problem is solved by introducing a sequence number which differentiates between the received packets and missed packets within a network [20].
Advantages. ROVER is reliable and efficient geographical multicast protocol because it floods only control packets, whereas the data packets are unicasted.
Disadvantages. The overhead is increased due to transmission of control packets. The delay also rises due to retransmissions and redundant messages [5, 26].
The delay can be reduced by using the technique of two zones as proposed in Brønsted and Kristensen. It uses hop count, which is decremented when the packet is forwarded and discarded upon reaching zero [31].
4.7. DG-CastoR
This protocol is based on geocast spatiotemporal routing because it uses time factor in routing. It is developed mainly for infotainment applications in VANET. It develops virtual community by predicting future positions of mobile nodes called a rendezvous group in which the mobile nodes may meet in the future.
The query is broadcasted only among those nodes which belong to a single rendezvous group at the assigned time. It estimates the path availability by predicting nodes future positions and maintains a neighbor trajectory table. In location based protocols, only node current position can be found but, in this protocol, future positions can also be predicted. In this protocol, path of those neighbors is also estimated which have similar route with the sender at the required time period. This protocol avoids congestion by transmitting packets to rendezvous group only rather than to whole network which reduces unnecessary transmissions.
Advantages. This protocol has robustness for maintaining a large network of nodes in VANET. It avoids unnecessary flooding of query packets which results in the reduction of traffic load. The network congestion is also reduced by estimating nodes position in future [27].
Disadvantages. In this protocol, the neighbor trajectory table is maintained by estimating the nodes future positions which increase the network overhead. This table needs to be continuously updated upon any change by sending Hello messages.
4.8. Mobicast—VANET Mobile Just in Time Multicasting Protocol—Spatiotemporary Multicast
It is a geographical spatiotemporary multicast protocol. In the spatiotemporary multicast protocol, the messages are transmitted at time “t.” Therefore, by combining both concepts of geographical and spatiotemporary, the messages are transmitted at time “t” within a specific geographical region called a ZOR. These messages are transmitted during specified time to multiple vehicles which are within ZOR. All vehicles know that the transmission is being performed during this time and remain in connection. The location of vehicles is found using GPS. It has various applications in emergency scenarios, online video advertisement, and game development.
Advantages. Mobicast has improved message dissemination rate successfully and reduced the packet overhead ratio by using the ZOF (group of recipients which forward multicast messages). The problem of network fragmentation is also avoided by using ZOF. Similarly, the packet delivery delay is also reduced in Mobicast by managing ZOR and ZOF efficiently.
Disadvantages. The connection between ZOR vehicles fails in case of sudden change in vehicles speed, whether that is sudden high speed or slow. It also relies on GPS for location information, network density information, and global knowledge which may not be available at the required time. Therefore, its performance may affect in large networks and in highly dynamic environments [5, 6].
4.9. DTSG: Dynamic Time-Stable Geocast Routing
DTSG [13–15] is a time-stable protocol, which can keep message saved for a certain amount of time within the specified area of interest. It has applications in road emergency warning system, in intelligent transportation system, and in other commercial activities where messages need to be saved and delivered to all vehicles within the desired geographical area. This protocol is reliable in delivery of messages to vehicles at the assigned time and within a specific geographical area.
DTSG works in two periods which are called prestable and stable periods. In prestable period, messages are only transmitted within desired region. In stable period, the intermediate nodes transmit messages within a specified time period to another vehicle by using store and forward technique. In this technique, messages are stored by the vehicle and deliver upon finding other vehicles at the required time.
Advantages. DTSG performance is not affected by the vehicles speed and traffic density by using store and forward technique. The protocol can work in a sparse environment because it selects the appropriate period (prestable/stable) according to the speed of vehicles and network density. This is a dynamic time-stable protocol in which message delivery time can be varied according to need which makes its performance robust [15].
Disadvantages. This protocol faces network overhead in saving messages, adjusting message delivery time, and switching between stability phases.
4.10. Constrained Geocast
This protocol aims to develop Cooperative Adaptive Cruise Control (CACC) for automatic traffic control. In this CACC system, vehicles control and adjust their speed automatically by the cooperative decisions taken during intervehicle communication.
In this model, the future positions of nodes are estimated by using their current movement and behavior. This concept is referred to by author as constrained geocast. In this protocol, the future interdependencies of vehicles are also considered to make this system reliable and efficient. It is possible to route packets selectively with reliability even within the high network load and dense environments by estimating vehicle positions.
Advantages. This protocol has reliable performance in dense networks because the node positions are already known. Vehicles adjust their speed according to traffic and are able to merge with other vehicles in the different lanes by intervehicle communication.
Disadvantages. The network overhead rises by developing vehicles position estimation in dense networks. The network fragmentation occurs due to high mobility of nodes [12].
4.11. Geocache
This protocol is developed to improve the traffic system and road safety by reducing traffic congestion. The information between vehicles is shared in such a way that the congested roads are avoided to balance the traffic load on all routes. In such scenario, it is necessary to inform the approaching vehicles about congestion efficiently and reliably. Therefore, cache mechanism is introduced in this protocol.
In cache mechanism, the information is saved and retrieved from cache rather than fetching from other nodes. Therefore, the amount of information exchanged between nodes decreases considerably, which reduces the network load also. The accuracy of traffic information is also maintained efficiently despite managing cache. This protocol has various applications such as in the management of road traffic, route navigation system, and making route decisions.
Advantages. This protocol reduced the traffic load successfully by storing, sharing, and exchanging road congestion information efficiently. Caching provides the method of limiting the broadcasting in terms of time and frequency, similar to a ZOR technique as mentioned in geocast protocol [16].
Disadvantages. The response time increases slightly when the congestion factor increases. However, it can be avoided by maintaining a distance between vehicles [16].
4.12. CBDRP: Cluster-Based Directional Routing Protocol
CBDRP is mainly developed for high speed vehicles moving at highways where minimum latency is required. Vehicles form the cluster to follow the similar direction like other vehicles. The source node transmits the packet to its cluster head first. The message is forwarded to that cluster head in which the destination node lies. Finally, the message is transmitted to the destination node. The simulation results show that it has low latency, high link stability, and high packet delivery ratio [8].
Advantages. The link stability is achieved by selecting new forwarding header when previous one goes out of transmission range during dynamic movements in highway scenario. As a result, the transmission becomes rapid and reliable. The traffic overhead is reduced because the requested packet is only sent to the cluster heads.
Disadvantages. The delay rises when the number of clusters increases. Another limitation of CBDRP is its unidirectional link [22].
4.13. COIN: Clustering for Open Intervehicle Communication Network
It is mainly developed for intervehicle communication in an intelligent transport system where infrastructure is not present. The communication between cluster heads and nodes is maintained by reducing the speed of node movements. In this protocol, the clusters are formed on the basis of mobility, position, and their behavior in various scenarios. The cluster heads schedule the node access to wireless media, which reduces the overhead and collision among cluster members.
Advantages. COIN allocates time to each cluster for transmission, which reduces the control overhead. This protocol improves the cluster stability by selecting those nodes which have the similar relative motion and low mobility.
Disadvantages. The mobility between nodes is kept low to maintain the radio connection between other nodes. The overhead increases by achieving cluster stability [22, 24]. The scalability and throughput are low due to nodes speed limitation [29].
5. Conclusion
In this paper, VANET multicast routing protocols are reviewed according to their various routing selection techniques and principles. The performance of protocols affects badly in VANET due to the dynamic movement of nodes which results in network fragmentation, delay, transmission overhead, and low throughput. Therefore, multicasting is used to improve the performance of VANET routing protocols. Multicasting in VANET routing protocols reduces the power consumption, fragmentation, transmission, and control overhead by sending multiple copies of messages from a single source to multiple specified vehicles. The comparison between multicast routing protocols for VANET is made upon the various characteristics of routing such as being map based, location based, spatiotemporal, and real time. The design of the VANET routing protocol is based upon the application area and the environment for which it is developed. Hence, it is not possible to design a single protocol, which is suitable for all VANET environments. Therefore, all VANET multicast routing protocols are reviewed along with their functionality, advantages, disadvantages, applications, and performance in various environments.
6. Future Work
Although there are various VANET multicast routing protocols developed for effective and efficient communication, still there are many areas in which these protocols need to be implemented. The performance of VANET multicast routing protocols can be improved by increasing throughput and scalability and reducing end to end delay. Therefore, the protocols can adapt themselves in a highly dynamic environment and reduce the transmission overhead within dense networks. This survey will be useful for the research community to carry out further research on VANET multicast routing protocols.
Footnotes
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.