
Abstract
There is no escaping fact that a huge amount of unexploited resources lies underwater which covers almost 70% of the Earth. Yet, the aquatic world has mainly been unaffected by the recent advances in the area of wireless sensor networks (WSNs) and their pervasive penetration in modern day research and industrial development. The current pace of research in the area of underwater sensor networks (UWSNs) is slow due to the difficulties arising in transferring the state-of-the-art WSNs to their underwater equivalent. Maximum underwater deployments rely on acoustics for enabling communication combined with special sensors having the capacity to take on harsh environment of the oceans. However, sensing and subsequent transmission tend to vary as per different subsea environments; for example, deep sea exploration requires altogether a different approach for communication as compared to shallow water communication. This paper particularly focuses on comprehensively gathering most recent developments in UWSN applications and their deployments. We have classified the underwater applications into five main classes, namely, monitoring, disaster, military, navigation, and sports, to cover the large spectrum of UWSN. The applications are further divided into relevant subclasses. We have also shown the challenges and opportunities faced by recent deployments of UWSN.
1. Introduction
The 75% of earth's surface is covered with water in the form of rivers, canals, seas, and oceans. Plenty of precious resources lie underwater which are required to be explored. The key to successful explorations has always been technology dependent. Recent advances in technologies have led the possibilities to do the underwater explorations using sensors at all levels which were not possible previously. Accordingly, underwater sensor network (UWSN) is emerging as an enabling technology for underwater explorations. UWSN is a fusion of wireless technology with extremely small micromechanical sensor technology having smart sensing, intelligent computing, and communication capabilities. UWSN is a network of autonomous sensor nodes [1] which are spatially distributed underwater to sense the water-related properties such as quality, temperature, and pressure. The sensed data can be utilized by variety of applications that can be used for the benefit of humans. The sensor nodes, stationary or mobile, are connected wirelessly via communication modules to transfer various events of interest [2]. Underwater communication is mainly done with a set of nodes transmitting their data to buoyant gateway nodes that relay the data to nearest coastal monitoring and control station also called remote station [3]. Generally, in UWSN acoustic transceivers are used for communication. The acoustic waves are low frequency waves which offer small bandwidth but have long wavelengths. Thus, acoustic waves can travel long distances and are used for relaying information over kilometers [4].
UWSNs are utilized for a wide range of applications such as monitoring the marine environment for scientific exploration to commercial exploitation and coastline protection to underwater pollution monitoring, from water-based disaster preventions to water-based sports facilitation. UWSN offers a promising solution to ever demanding applications. However, UWSN applications are exciting but challenging at the same time. The reason lies in unpredictable conditions of water environment which creates serious constraints in the design and deployment of such networks. The focus of this paper is to survey the available UWSN application. The paper further focuses on classifying these applications and presenting a summary for each class.
The rest of the paper is organized as follows: Section 2 discusses the general architecture of UWSNs. Section 3 discusses the recent research contributions in the field of UWSN and provides a detailed application classification. The challenges and opportunities for UWSN are detailed in Section 4. In the end, Section 5 concludes the paper.
2. Underwater Wireless Sensor Network Architecture
In this section, we discuss the common UWSN architectures (Figure 1) which are basis for designing the UWSN applications.

Underwater sensor network architecture.
2.1. 1D-UWSN Architecture
One-dimensional- (1D-) UWSN architecture refers to a network where the sensor nodes are deployed autonomously. Each sensor node is a stand-alone network itself, responsible for sensing, processing, and transmitting the information to the remote station [5]. A node in this type of architecture can be a floating buoy which can sense underwater properties or it can be deployed underwater for a particular period of time to sense information and then float towards the surface to transmit the sensed information to the remote station. It can be an autonomous underwater vehicle (AUV) which dives inside the water, sense or collect the underwater properties, and relay the information to the remote station. In 1D-UWSN the nodes can communicate using acoustic, Radio Frequency (RF), or optical communication. Moreover, the topological nature of 1D-UWSN is star where the transmission across the sensor node and the remote station is carried over a single hop.
2.2. 2D-UWSN Architecture
Two-dimensional- (2D-) UWSN architecture refers to a network where a group of sensor nodes (cluster) are deployed underwater. Each cluster has a cluster head (also called anchor node). The clusters are fixed as they are anchored at the underwater surface. Each member of the cluster gathers the underwater data and communicates it to the anchor node. The anchor node gathers the information/data from all its member nodes and relays it to the surface buoyant nodes. In 2D-UWSN, the communication is carried in two dimensions; that is, (i) each member of the cluster communicates with its anchor node with horizontal communication link while (ii) the anchor node communicates with the surface buoyant node with vertical communication link. In 2D-UWSN, acoustic, optical, and RF communication can be used depending on the type of application and nature of underwater environment. In 2D-UWSN, acoustics communication is preferred for underwater anchor node and the surface buoyant node due to typically high distance between them. For the cluster of nodes, the network arrangement can be star, mesh, or ring depending on the application requirement. The 2D-UWSN can be used for both time-critical and delay tolerant applications [6].
2.3. 3D-UWSN Architecture
In this type of network, the sensors are deployed underwater in the form of clusters and are anchored at different depths. Due to the deployment of the sensors at variable heights, the communication between the sensors goes beyond the two dimensions. There are three communication scenarios in this architecture: (i) intercluster communication of nodes at different depths, (ii) intracluster (sensor-anchor node) communication, and (iii) anchor-buoyant node communication. In all three types of communication scenarios, acoustic, optical, and RF links can be used.
2.4. 4D-UWSN Architecture
Four-dimensional- (4D-) UWSN is designed by the combination of fixed UWSN, that is, 3D-UWSN and mobile UWSNs. The mobile UWSN consists of remotely operative underwater vehicles (ROVs) to collect data from the anchor nodes and relay the data to the remote station. ROVs can be autonomous submersible robots, vehicles, ships, and even submarines. Each underwater sensor node can be autonomous in relaying the data directly to ROVs depending on how close that particular sensor node is to the ROV. The communication scenario between ROV and underwater sensor node depends on the distance and data between them and either acoustic or radio can be used. As the transmission is to be directly relayed to ROV, the sensors which have large data and are close to ROVs can use radio links while the sensors which have small data to transmit or are far from ROV can use acoustics links [7, 8].
3. Underwater Wireless Sensor Network Application Classification
UWSN applications are rapidly gaining popularity for enabling advances in the area of ocean monitoring and observatory systems, deep sea surveillance, tracking of various entities of the aquatic environment, and unearthing resources. UWSNs find their application in fields like offshore oil and gas extraction, oil spills, military surveillance and reconnaissance, mine detection, pollution monitoring, natural calamities like tsunami and hurricane forecast, coral reef and habitat monitoring of marine life, and fish farming. A comprehensive classification of potential UWSN applications is shown in Figure 2. This section presents a survey of recent developments in the domain of UWSN applications. At the top level we classify the UWSN applications as monitoring, disaster forecasting and management, military, navigation, and sports which are going to have a significant impact on the underwater world and provide benefits to the humans. We then further classified monitoring, disaster, and military applications into relevant subclasses.
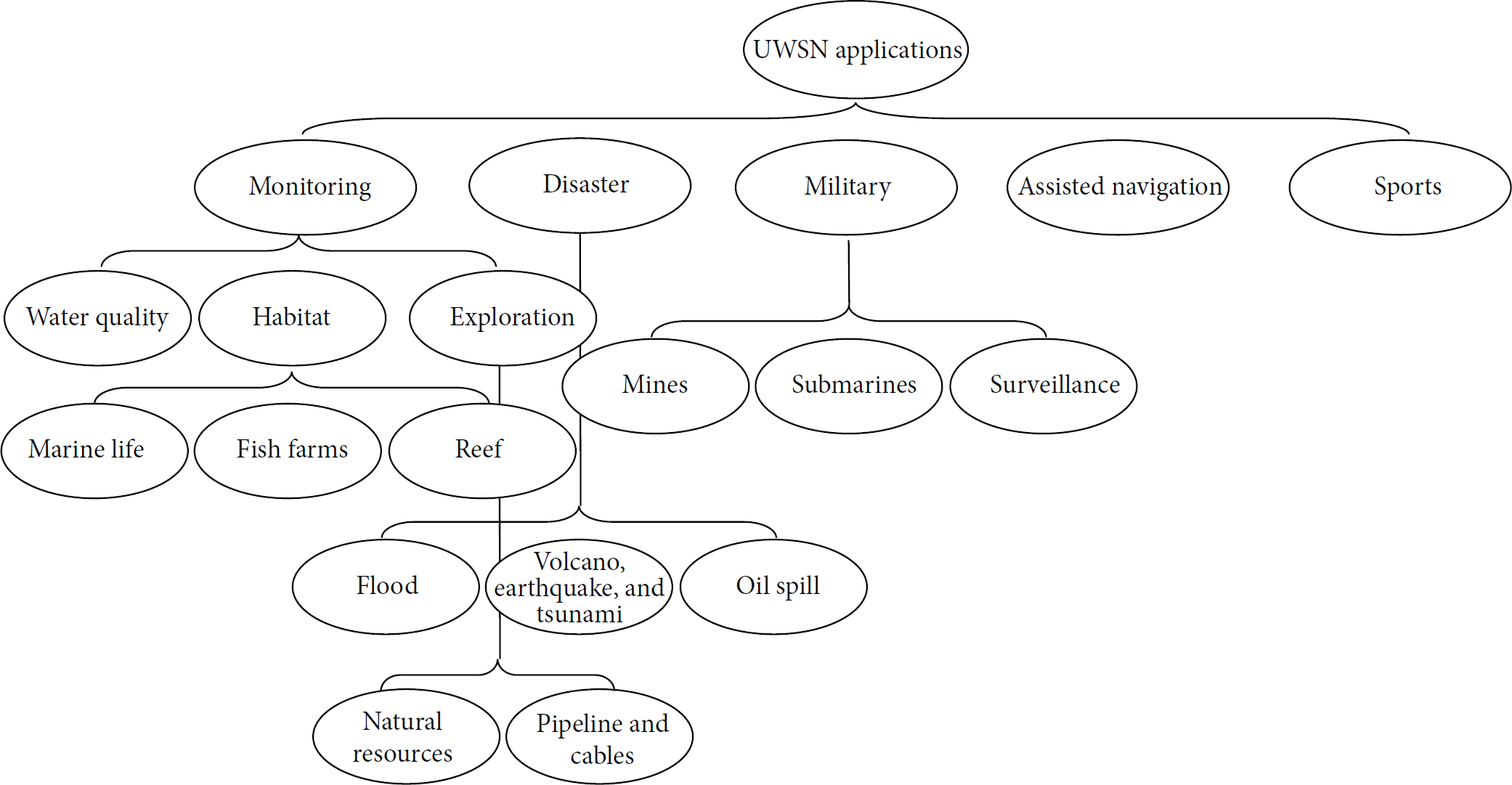
Classification of underwater wireless sensor network applications.
3.1. Monitoring Applications
Underwater monitoring refers to a network of sensors which is deployed underwater to monitor the underwater environment, its characteristics, properties, or any object of interest. These applications are particularly related to monitoring the physical environment. Underwater monitoring applications can further be classified into (i) water quality monitoring, (ii) habitat monitoring, and (iii) monitoring underwater explorations.
3.1.1. Water Quality
Water is precious resource and is premier factor for survival of living things under or above the water surface. Therefore, it is important to monitor the quality of water. The underwater quality monitoring applications vary from monitoring water quality of canals to oceans.
The authors in [9] have developed an application to monitor the quality of pool water for trout farms. For the growth of trout in a farm/pool, various parameters were monitored such as chemical oxygen demand, ammonium nitrogen (NH3-N), pH, and electrical conductivity (EC). The parameters were monitored for 270 days between August 2011 and April 2012. An algorithm was proposed by the authors which can display the information of the input and output of all the four pools. The comparison was made using fuzzy logic for evaluating the sensed data and notifying in the case of any critical state whenever the parameters surpass the threshold values.
In [10], the authors have developed two UWSN based approaches to monitor the water quality at drinking water reservoirs. First approach is based on using sensors integrated with mini-AUV responsible for collecting the water samples and transmission of the information to the remote station. Second approach consists of probes mounted with solar panels using IEEE 802.15.4-based wireless interface for collecting and transmitting the information. Both approaches were compared in terms of total time needed for deployment, total time needed for analysis, total cost of ownership including deployment, total number of measurements per analysis for a site, the need for qualified operators, real-time analysis, and probe diversity. It was shown that the second approach proved to be more applicable, efficient, and of low cost for continuous water quality monitoring.
In [11], the authors have developed WSN based system to monitor the water quality of rivers. The authors have designed and proposed a sensor node capable of monitoring pH of water. The sensor module consists of signal processing module for processing the sensed data, a signal conditioning module for comparing the data with the threshold values, and wireless Zigbee module for transmission of data to the remote station. The authors have successfully designed and deployed the system for river quality monitoring in India. A similar Zigbee based UWSN system is developed in [63] and proposed for water quality monitoring of rivers.
In [12], the authors have developed a WSN based water quality monitoring system. The proposed prototype monitors the water temperature (T), dissolved oxygen, pH, and EC in real time. The information is disseminated in graphical and tabular formats to relevant stake holders through web-based portal and mobile phone platforms.
An underwater sensor network to monitor the water quality and pollution is proposed in [13]. Underwater sensor nodes in their proposed test bench measure entities such as pH, turbidity (Tur), and temperature. The collected data is relayed to a buoyant node having GPRS connectivity that will relay the information gathered to the remote station.
The authors in [14] have presented a decentralized ocean pollution and wreckage detection mechanism based on underwater sensor nodes equipped with short range acoustic modems for communication.
3.1.2. Habitat
Underwater habitat monitoring deals with the study of environment of any living organism living over or in the water. It is one of the most interesting yet challenging fields of natural sciences. Habitat monitoring, when considered underwater, becomes even more challenging due to vulnerable underwater conditions. UWSN can also be used for ecosystem monitoring applications. Underwater habitat monitoring applications can be further classified into (i) marine life monitoring, (ii) fish farm monitoring, and (iii) underwater plants/coral reef monitoring applications.
(1) Marine Life. Marine life monitoring application deals with the monitoring environment of various species living above the water or underwater. ACMENet is European funded project designed for underwater marine environment monitoring [15]. ACMENet is an underwater acoustic sensor network which is capable of monitoring marine environment such as fishes and any human or nonhuman activity within the coverage area and used for geological surveys. The authors have developed a protocol based on TDMA master-slave mechanism for data transfer across the sensor nodes.
The authors in [16] have developed an UWSN framework for aquatic monitoring. The framework has capability to monitor marine environment at different levels whose data can be used to develop and verify models for ecosystems, prediction of possibility of any change in ecological phenomena, and also adapting to any environmental/underwater climatic changes. The system has features of sensing, wireless transmission to remote station, visualizing, and alarming about the events. The system is currently deployed in Queensland, Australia. The authors have designed and developed an ad hoc system, based on clusters (star topology) where cluster head directly transmits data to the buoyant gateway. A remote data transmission from the gateway to the control center is proposed. The proposed system was used for monitoring the underwater luminosity (Lum) and temperature.
The authors in [17] developed a Smart Environmental Monitoring and Analysis Technology (SEMAT) for marine research and monitoring water fields. The authors claim that SEMAT is cheaper marine environment observatory system compared to its counterparts and traditional systems. SEMAT comprises plug-and-play smart sensors, short range wireless transmission, and near-real-time analysis tools. SEMAT can be used for quick and short term deployments especially in shallow coastal aquatic environments.
The authors in [18] have developed an UWSN based coastal shallow water marine environment monitoring system. The system is a prototype which has been successfully tested and deployed at Mar Menor coastal lagoon, Spain. The developed system is capable of collecting oceanographic data through various water specific sensors. The data is transmitted to the sink node (buoy) which relays the information to the remote station for meaningful results. The authors have also developed application using LabView and mapped it with Google Maps. The authors conclude that the proposed prototype is efficient in terms of communication, better network lifetime, and data reliability.
An intelligent marine vehicle sensor network architecture has been developed in [19]. The authors have also designed protocols for ocean monitoring applications. The authors in [20] have presented a sensor network application for habitat monitoring of sea shell. They have presented an entire architecture. The proposed network is also capable of coastal monitoring and is currently deployed in Zhejiang province, China.
A good survey on applications of UWSN for marine environment monitoring is presented in [64]. The survey includes different techniques, recent projects, and applications along with the latest advancement in the field.
(2) Fish Farms. Fish farming has become one of the most demanding occupations and is considered as a good economical resource. Fish farming requires strict and most relevant habitat conditions, which requires a strict monitoring of the farm. Therefore, sensors are deployed to monitor the habitat conditions of a particular fish to maintain and create a closed environment for fish farming.
The authors in [21] have developed UWSN application which is able to assess the amount of uneaten feed and fiscal waste in fish farm. The system developed is particularly tested in marine fish farm for fauna and flora. The authors devised and proposed a group based wireless sensor network for accurate quantitative analyses for monitoring water pollution. The authors in [9] developed, monitored, and maintained the ecosystem for trout in trout farms by sensing the quality of water.
In [22] the authors have formulated a Zigbee based UWSN for monitoring the fish farm properties. The authors designed fish farm property specific sensor nodes which sense pH, NH4, and temperature and transmit the information to central unit through Zigbee based routing protocol. The authors have proposed the system for small fish ponds and pools.
The authors of [23] designed and developed WSN based system application which has the ability to monitor the large farms. The system has features of automatic monitoring, history chart of the sensors data, and remote login for interested users. Authors have presented comparison of wireless technologies and have proposed Zigbee technology as optimal in this case. The developed system is able to monitor parameters like dissolved oxygen, pH values, temperature, the water level, and humidity and the information is wirelessly transmitted to managers station. Furthermore, wireless cameras are used and integrated with the system and the Internet for wireless monitoring anytime and anywhere in the world.
In [24] the authors have developed an energy efficient sensor based network for monitoring fishes in ponds and lakes. The framework has features of detecting depth of the pond and monitoring and maintaining the quality of water by maintaining the acidic levels in the water. The depth is detected by using RGB sensors while pH and oxygen sensors are used to monitor the quality of the water. The authors have formulated Clustering Protocol of Water Sensor (CPWS) network, an energy efficient routing protocol which increases the overall network lifetime making the system more reliable, robust, and everlasting.
(3) Coral Reef. Coral reefs are diversified underwater ecosystems. Coral reefs are built by microorganism living underwater. Coral reefs are important part of marine ecology and marine life. UWSN has potential of coral reef habitat monitoring. Following are UWSN based applications.
The authors of [15] have presented and developed UWSN based coral reef observatory system and application. The system is prototype design based on 4 core network elements which are (i) stationary nodes, (ii) moving nodes, (iii) surface buoy nodes, and (iv) remote station. The stationary nodes are deployed underwater at specific coral targeted places, equipped with underwater condition monitoring sensors such as temperature, cameras, and pH sensors. The moving nodes are autonomous underwater vehicles (AUVs) which are capable of deploying the nodes, collecting the senses information from the stationary nodes, and also relaying the information to the surface buoy nodes. The surface buoy nodes transmit the information to the remote station where scientist could investigate and monitor the sensed data. The prototype is highly adaptable to the harsh water conditions and is deployed in real time in Okinawa coast in Japan; however there are some shortcomings such as battery and network lifetime.
Alippi et al. have designed intelligent autonomous underwater vehicle based Starbug project for monitoring and locating coral reefs in shallow water [16]. The AUV is very carefully designed having a video transceiver, water quality monitoring sensors, acoustic communication module, magnetic compass, pressure sensors, and GPS sensors. Starbug project has proven to be platform with reliable monitoring and great commercial potential. However, the authors have emphasized on lowering the cost of the system.
Pirisi et al. have designed and developed an intelligent buoy for coral reef monitoring [25]. The buoy is intelligent and is made by introducing a novel approach, optimizing the energy by converting the sea wave energy, thus increasing the network lifetime. The design is brief in the research presented. The prototype developed is tested in real time and is proposed by the authors for potential applications for coral reef and marine life and marine ecological systems and applications.
Bainbridge et al. have presented in their research [26] one of the most practical, real-time, and mature UWSNs for monitoring coral reefs. This UWSN is deployed at seven different coral reef locations in northeastern Australia and currently in operation since past two years. The system designed is acoustic based, reliable in terms of ocean data monitoring, and robust in terms of sustaining the harsh environment.
3.1.3. Underwater Exploration
There are large number of minerals present underwater which is required to be explored such as oil and gas. Also, one has to meet the water end while joining one end of the surface with another. While water is covering the large part of the Earth's surface, the remaining dry surface of earth is connected by laying cables underwater. Underwater cables are deployed which bring some of the most basic social necessities such as oil, gas pipelines, and fiber optics cables. Therefore UWSN can be used to explore the precious resources and also to monitor the underwater pipeline and cables. Underwater explorations and applications are further categorized into (i) underwater natural resource explorations and (ii) cable and pipeline monitoring applications for underwater oil and gas explorations.
(1) Natural Resources. The authors in [65] have developed an UWSN which deployed to locate and investigate manganese crust. The system developed uses remotely operative underwater vehicle (ROV) integrated with acoustics communication module and vision based mapping system and monitors in situ manganese crust depth up to 3000 m. The ROV is operated in low altitudes. Thus the authors have successfully carried out experiments using the ROV based UWSN and have concluded and proposed the system as useful tool for manganese crust detection and measurement underwater.
The authors in [27] have proposed an UWSN which is a combination of underwater acoustic sensor networks and underwater mobile (ROVs, AUVs) sensor networks to discover and excavate the mineral resources underwater. The proposed system can be used on large scale to scan large and deep spaces in oceans for exploration.
An acoustic based UWSN proposed in [15] is also used for deep sea exploration and monitoring of coastal areas. The system is specifically tested for coastal application by deploying cameras underwater.
Detailed literature is present motivating the researchers to develop UWSN application for deep sea explorations and application [1, 4]. The literature presents the communication architecture and possible design of the system and highlights suitable conditions and challenges.
(2) Marine Cable and Pipeline. There are large number of oil and gas pipelines laid, interconnecting entire continents. UWSN has potential to monitor underwater oil and gas pipeline monitoring applications. Applications are discussed below.
Mohamed et al. have presented a very detailed survey over underwater oil and gas pipeline monitoring using UWSN [28]. The authors discussed the sensor network architecture which includes four probable networks which are underwater wireless acoustics sensor networks, underwater wired acoustics sensor networks, underwater wireless RF sensor networks and underwater wired networks. Furthermore, integration of wired/acoustic and wired/RF can also be possible. The authors have compared all the networks and proposed underwater integrated wired/acoustic sensor networks and underwater integrated wired/RF sensor networks for oil and gas pipeline monitoring applications.
Jawhar et al. present a framework for pipeline monitoring using WSNs [29]. The paper presents reference model which could be used as applications. The prototype designed is based on proposed architectural model which is capable of monitoring the pipelines underwater and also giving additional control function in case of any leakage in the pipeline. The prototype is tested in lab environment. The authors conclude with testing various WSN based technologies and protocols for more reliable network.
Saeed et al. have developed a prototype for monitoring oil and gas in pipeline underwater [30]. The prototype was tested in lab environment. The authors have concluded the initial work successfully; however the real-time implementation still holds serious concerns in terms of its network lifetime and reliability. Also Yu and Guo have designed and proposed an efficient oil and gas pipeline monitoring system using UWSN [31].
The UWSN monitoring applications are summarized in Table 1. It can be observed that when it comes to water quality monitoring, most of the recent applications have used RF to achieve their objectives. Considering any sort of water contaminating impurities such as oil spills, they are in restricted area of water; therefore, due to shorter distances, RF signals fulfill the requirements. However, there is an equal emphasis on using RF and acoustic waves as the communication type. Since RF has limitations with respect to distance, acoustic has been considered for longer distances ranging to a few kilometers. Acoustics are employed mostly for marine life, reef, and deep sea exploration applications, since more coverage is required. A trend of employing various architectures is also seen when dealing with these applications, whereas, for marine life, reef, and exploration applications, 3D and 4D architectures are more preferred due to different depths and distances of the objects under consideration. Since fish farms require a low coverage sensor network, 1D and static 2D architectures will perform an efficient job to cater the application.
Comparison of UWSN monitoring applications.

C = camera, D = depth, H = humidity, L = water level, O2 = oxygen, P = pressure, S = salinity, T = temperature, V = velocity, Cur = current, Comp = magnetic compass, EC = electrical conductivity, NH3-N = ammonium nitrogen,
3.2. Disaster
Generally, the natural disasters are inevitable. Among others, water based natural disasters are more dangerous and produced huge destruction to the earth. Accordingly, disaster monitoring and preventive mechanisms are very necessary. UWSN offers a wide range of applications for management and recovery of such disasters. More particularly, it relates to the monitoring of events that aggravate a disasters aftermath. Along with inadequate resources for comprehensive monitoring of the vast area of water (e.g., ocean), the task becomes even more challenging with occasionally ruthless weather. Therefore, efficient monitoring of marine and aquatic dynamics is a significant research challenge. UWSN monitoring strategies for disaster management and prevention can be formulated into a wide variety of applications such as floods, underwater volcanic eruptions, underwater earthquakes and their resulting tsunamis, and oil spills which lead to above-the-water and underwater ecological instabilities.
3.2.1. Floods
The repercussions of a flood and its increased frequency have pushed the researchers to find ways of timely flood alerts. The alerts need not only be placed in urban shores and hence require remote deployment. UWSN helps develop solutions of underwater sensor deployments with over-the-water relay agents to calculate aquatic vitals. These vitals are gathered at remote station and inspected for flood indications.
Pasi and Bhave have addressed the issue of flood monitoring and alarming with the help of UWSNs [32]. The designed system consists of sensor module, observatory module, and transponder module. The sensor module is responsible for monitoring water and gathering water-related parameters such as level, thrust, and intensity of water as flood indicators. The information is transmitted to the remote station for further observations. The purpose of observatory module is to observe the information and predict the flood. The transponder module is used for relaying the information in case of the flood. The designed system is simulated and tested in perspective of its efficiency by varying the number of nodes deployed versus the time delay. The system is also tested for its localization error and the area of coverage.
Tyan and Oh [33] have proposed an acoustic based UWSN for flood monitoring in rivers. The designed system is based on 4D-UWSN architecture which consists of underwater deployed sensors, AUV, and a remote station. The sensor relays the information acoustically to the AUV which collects the information and transmits the information to the remote station. The designed system is tested in 5000 m by 200 m wide river testbed. The authors have successfully tested and deployed the network in real time.
Marin-Perez et al. [34] have designed a robust flood warning system based on UWSN. The designed system is Zigbee based, with integrated sensors which collect the information of different water levels. The system is also integrated with SCADA system which is responsible for monitoring the hydrological events such as rainfall and other weather monitoring conditions. The system is tested and implemented in real time in flash-flood prone 650 km2 semiarid watershed in Southern Spain.
Udo and Isong [35] have designed a sensor based flood monitoring and detection system. The system takes into account information such as humidity, temperature, water level, and amount of rainfall as flood indicators. The sensor deployed in the sensor field senses the information and transmits it to the remote station where, on crossing the threshold, the vicinities are notified through Short Message Service (SMS). The system currently covers 15 flood prone regions in Uyo metropolis in Akwa Ibom state, Nigeria.
3.2.2. Volcano, Earthquake, and Tsunami
Underwater earthquakes and volcanoes are natural disasters and causes for endangering living things. These natural calamities can occur anytime and anywhere over the surface of earth and are even more alarming when they occur underwater, depending upon the seismic and the geological changes that take place under earth. Thus, it is important to monitor such conditions.
Kumar et al. [36] have discussed UWSN architecture and proposed 4D-UWSN for early warning generation in case of any hazardous event such as earthquakes and tsunamis. The authors have proposed multicarrier communication and OFDM for efficient underwater communication in such scenarios.
Casey et al. [37] have proposed an efficient architecture for detecting tsunamis. The proposed sensor based architecture utilizes seismic pressure sensors to predict the tsunami underwater and relay sensed informed by directed diffusion routing protocol. The architecture works on the sense and response mechanism. The authors have detailed a number of approaches and have tested the proposed network in a testbed environment.
In [66], a detailed survey highlights underwater natural disaster monitoring applications including underwater earthquakes and volcanoes. To the best of our knowledge, only few real deployed applications are present to date for seismic and tsunami detection. There is a lot of literature addressing the natural calamities through UWSN and formulating efficient, reliable, and robust application but hardly are there full applications designed.
3.2.3. Oil Spill
Manmade pollution is an important factor to consider when talking about marine life health. Marine life is highly affected by oil spills pollution and therefore UWSNs have contributed a way to find out the location and thickness of oil spills in water which can expedite the cleaning procedure.
In [38], the authors have devised an ad hoc UWSN that detects ocean pollution. They have specified different sensors, their synchronization algorithms, routing protocols, and the complete protocol stack. The work focuses on maximizing the network lifetime and QoS.
Iwendi and Allen [39] have demonstrated the security issues in Niger-Delta Oil and Gas Sector, where they have worked specifically on developing a network which has a very secure key distribution scheme. Apart from key management system, the work also focuses on robust and fast clustering algorithms with dynamic key allocation system.
In [40], the work focuses on designing a sensor that is able to sense, process, and transmit information relating the thickness and location of the oil spill. The work suggests two algorithms Light Sensor Array and Conductivity Array in order to find out the thickness of the oil spill. The work also focuses on designing a simulator that shows real-time data on a map, relating the thickness and the location of the oil spill.
In [41], the authors focused on providing the feasibility of using UWSNs for the use of monitoring oil spillage, detection, and pipeline vandalization. The work also focuses on describing the applications, features, network type, and challenges, which makes UWSNs an intelligent choice to make in detection of oil spillage and pipeline vandalization in Nigeria.
The comparison of disaster applications is given in Table 2. When disaster applications are surveyed, flood applications tend to use RF in conjunction with 2D architectures more as compared to acoustics in conjunction with 4D due to the fact that flood related applications can be greatly covered by deploying sensors in the form of clusters. This ultimately leads to low coverage UWSNs employing RF communication paradigms. For applications related to volcanoes, simulation and analytical models have been proposed to cater these. For oil spill applications as well, analytical, simulation, and testbed models employing RFs and acoustics have been considered with 2D, 3D, and 4D architectures.
Comparison of UWSN disaster applications.

3.3. Military
UWSNs are employed to assist military applications as well. These systems take the aid of different sensors deployed for detection of different aspects of military applications. Different sensors such as cameras, imaging sonars, and metal detectors integrated with AUVs are used to assist in finding underwater mines, securing ports, and submarines and are also used for monitoring and surveillance. These applications can lead to economic solution to protect naval forces.
3.3.1. Mines
Since a sensor can sense physical parameters, it is an intellectual practice to detect hidden mines underwater. This can assist the military ships in a trouble-free voyage. The mines are usually made up of ferrous materials and they can be differentiated from underwater clutter based on the fact that the clutter is nonmetal. Therefore using metal detecting sensors can help find clutters underwater.
In [42], the authors have illustrated a developing system from Naval Surface Warfare Center, Florida, that uses a magnetic real-time tracking vector gradiometer (RTG) and integrates it with an autonomous vehicle to use underwater. Another system called the Buried Object Scanning Sonar (BOSS) would be placed with the RTG in order to optimize the performance of clutter avoidance. The sensor has been placed in the nose of the vehicle to avoid electromagnetic interferences from the rest of the vehicle.
Another work [43] focused on designing a system for mine detections in which an AUV is employed with a sensor that is located on its side. The sensor is capable of producing very high resolution images that can result in localizing the underwater mines. Here the possibility of error is also addressed by capturing multiple view of the same area. The system is efficient in a way that the route of the AUV can be predicted even before the deployment procedure by using Synthetic Aperture Sonar (SAS).
Authors in [44] use a pattern analyzer by taking images underwater. The pattern analyzer can detect mines and similar structures. These images that are taken underwater are compared with an atlas of images of mines that have been provided by the Naval Surface Warfare Center.
In [45], a simulation based model has been created that considers five different types of AUVs and two sonar types (Raytheon and Klein). The software model is implemented in different areas such as the Chesapeake Bay and is tested for different types of mines and area and the way the mine is cleared. The authors showed that the Raytheon type of sonar, if used with any of the vehicle types, would consume more energy as compared to Klein sonar.
In another work [46], comparing the classifiers that use machine-learning approach and computer vision. The work corresponds to taking the aid of semisynthetic data for preprocessing of data before it is given as an input to machine-learning and computer vision approaches. This way, the amount of data set given to the approaches is reduced.
3.3.2. Submarines
Target localization is yet another application of UWSNs that take the aid of AUVs to localize submarines. Conventional ways of submarine localization require heavy computation. These UWSNs based systems tend to provide economical solutions to the localization problems.
In [47], the authors have investigated the localization of submarines and focused on two problems that are limited communication range due to acoustic transmission and incorporating sonar signal processing on the AUVs. The trial, called the GLINT09, was experimented close to Elba, an island in Italy at a depth of 110 meters. It was concluded in the experimentation that AUVs provide an optimal solution to localization of submarines with less manpower, less risk, and more space in order to realize the 3D imaging.
The authors in [48] propose a paradigm based on distributed sensor network for submarine detection in places where the submarines are not easily tracked by the sonar system. This paradigm estimates the Cramer-Rao lower bound for the purpose of accuracy of estimation. The results are in the form of either presence of the submarine or no presence of the submarine (binary results). The results have also been extended from single submarine detection to multiple submarines detection.
In another work [49], Particle Swarm Optimization (PSO) for estimating the sensor position considers the attenuation, water depth, and transmission range.
3.3.3. Surveillance
UWSNs are also used for surveillance purposes where the intrusion of any undesired entity is detected. This can be used for near- and offshore surveillance purposes. This has a huge set of applications offered for near-shore surveillance such as detection of battle ships and arrival of logistics.
The GLINT10 [50] field test trials were performed in order to test the warfare surveillance. The work focuses on signal processing capabilities of the said project. The results showed that AUVs are in probation to become a complete autonomous system in dynamic environment but so far they do not possess enough capability of operating autonomously.
Underwater acoustic network (UAN) [51] is an EU funded project that was developed to protect offshore and near-shore equipment and infrastructures. The UAN11 project held in 2011 in Norway experiments the AUVs for the surveillance of nodes deployed on the site. The experiment consisted of four nodes, two AUVs, and a node that is mobile on a vessel. The network resulted in a very robust performance by being able to deal with variations such as when a node was added or subtracted from the network. They also presented their results based on average delivery ration, packet loss, and round-trip time.
In [52], the authors have suggested a new architecture layout of underwater surveillance system which consists of sensors deployed on the surface first; then the depth and the location where the maximum coverage is achieved are selected. The nodes are considered to bear different types of sensors such as magnetic, radiation, mechanical, and acoustic. Data mining techniques are further used in order to differentiate between different types of objects such as submarines, divers, mines, and vehicles.
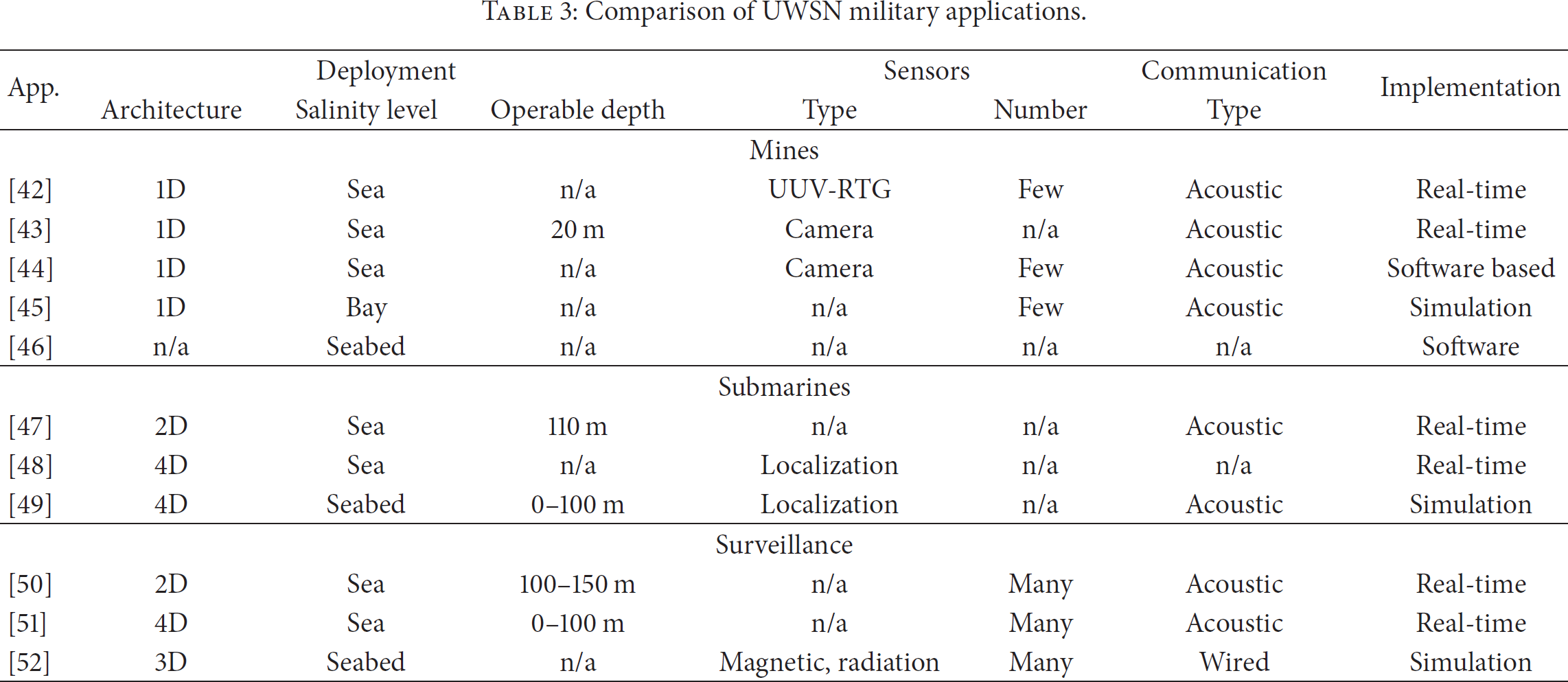
Full activated systems have also been deployed; for example, in Japan [67], a tsunami monitoring system has been deployed that consists of 150 underwater ocean observatories. UWSN military applications are summarized in Table 3. For military applications, acoustics have been more preferred due to longer distance coverage through the UWSN. Also combination of RF and acoustics is preferred mainly due to the fact that RF travels faster compared to acoustics underwater; hence they facilitate quick transmission and responses in case of the emergencies. For mine detection, 1D architectures have been more preferred due to stationary position of the mines. For submarines, 2D and 4D architectures have been preferred. For surveillance, we have experimented with 2D, 3D, and 4D architectures.
Comparison of UWSN military applications.
3.4. Assisted Navigation
Underwater environment is extremely uneven, unexplored, random, and dark with increasing depth. In such environment there is need of assistance for navigating the vessels, boats, ships, and even swimmer and explorers. Navigating assistive technologies which are most common over the surface of water are not used underwater due to the change in medium of transmission. Therefore, in order to locate, guide, and navigate, there is a need of assistive navigation technologies, system, and application which could be used underwater. In this prospect, UWSN can be used to provide assistive navigation systems and applications. Following are the UWSN applications discussed.
A detailed literature regarding underwater localization could be found in [68]. The authors in [53] have used AUV to assist in localization underwater. The designed system is acoustics based and uses acoustic localization techniques. The authors have tested the system in multiple stages (denser nodes) and compared the performance on the basis of localization coverage, accuracy, and communication costs. Thus they concluded that there lays a tradeoff between localization at multistage and higher communication cost.
Guo and Liu [54] have proposed anchor-free localization algorithm for underwater sensor location assistance. The algorithm designed relies on the information of adjacent nodes. The proposed technique is tested for both static and mobile UWSNs.
Carroll et al. [55] have proposed an on-demand underwater localization algorithm for locating the underwater sensors. The authors have developed a mathematical model of the designed algorithm which has been embedded and tested in real time in small pond and pools.
The summary of UWSN assisted navigation applications is given in Table 4. Navigation applications take the aid of acoustic communication to cover longer distances. Localization, tracking, and trilateration applications require an UWSN that communications with the ROV to acquire data from the anchor nodes and relay the data to the remote station (4D architecture).
Comparison of UWSN assisted navigation applications.

3.5. Sports
A wide set of UWSN applications exist for underwater sports category as well. These applications are different from other UWSN applications in terms of velocity of the mobility of the nodes, sensing parameters, and so forth.
In [56] the authors have presented a wireless sensor network that is used to monitor the performance of a swimmer or multiple swimmers. The networks bandwidth is put into consideration in this work, where the performance is communicated to the coach and other swimmers simultaneously. Also in [69], a similar motive is achieved that requires real-time feedback to coaches.
Another work, [57], focuses on finding the location of swimmers in a pool. This is done by utilizing magnetic variations that are caused by the pools. This method is said to be more accurate as compared to inertial positioning in which postprocessing is required.
The authors in [58] have also investigated the localization of swimmers by analyzing the use of magnetic, inertial, accelerometers, magnetometers, and gyroscope sensors.
In [59], the signal processing of the data achieved from a swimmers performance is performed. This shortlists the data that is sent to the coaches.
In [60], an optical system is used for transmission of data in real time for communicating real-time feedback of swimmers to coaches. Also in [61], an optical wireless system is used but it focuses on communicating the stroke rate during swimming. Again in [62], a wireless optical modem based on FSK is used for communicating the swimmers feedback.
Applications in UWSN sport are summarized in Table 5. As far as sports applications are considered, RF transceivers are widely used; however, a trend of using optical signals has also been used as most of the applications that fall in this category use a low coverage area (such as in pools). 2D architectures have been employed because numbers of sensors in form of clusters are suspended in the water to collect the required information that would communicate with the cluster head (acting as a remote station when distances are short).
Comparison of UWSN sport applications.

4. Challenges and Opportunities
While UWSN is a promising new field and may help in exploring the unfathomed world that lies underwater, there are many challenges and opportunities as well.
Unpredictable Underwater Environment. Underwater conditions are extremely unpredictable. The anonymous high water pressure, unpredictable underwater activities, and uneven depths of the underwater surface make it difficult to design and deploy UWSNs.
Intricate Network Design and Deployment. Due to the unpredictable underwater environment, it is extremely difficult to deploy the network underwater which works reliably and wirelessly. The current tethered technology allows constrained communication but it incurs significant cost of deployment, maintenance, and device recovery to cope with volatile undersea conditions.
Unscalability. Traditional underwater exploration relies on either a single high-cost underwater device or a small-scale underwater network. Neither existing technology is suitable for applications covering a large area. Enabling a scalable underwater sensor network technology is essential for exploring a huge underwater space.
Unreliable Information. Underwater nodes are in continuous motion due to the water currents; thus locating nodes underwater becomes much more crucial. Traditional positioning and localization systems do not work underwater. Therefore, underwater conditions dismantle the location of the nodes and the network topology which ultimately makes the information transmission unreliable.
Requirement of Novel Protocols for UWSNs. In underwater communication, the medium of communication is water, unlike air as in terrestrial sensor networks. Therefore, terrestrial sensor network communication protocols get void underwater. Mostly, acoustic signals are used for underwater communication over large distances, while radios are considered for short-distance, water surface communication. But radio signals transmit for long distances at extra low frequencies, which requires large antennas and high transmission power [1], which can decrease the overall network lifetime of UWSNs. Moreover, the propagation delay of acoustic communication is very high compared to RF communication; hence many algorithms and protocols for terrestrial WSN cannot be adapted directly to UWSN.
Low Data Rates. Radio frequency (RF) communications are not effective in underwater communication due to medium effect on communication. Water absorbs much of the RF energy and hence only very short range communication is allowable using RF [4]. Instead, acoustic communication is being used to transmit pulse signals and low fidelity information underwater due to its low bandwidth. Potential UWSN applications such as measuring the amount of pollution from a fishing farm at the seabed [21] require transmitting lots of data. However, with such low frequencies, it requires a lot of time to send such dynamic data.
Physical Damage to Equipment. The sensors used in underwater devices are susceptible to routine underwater challenges, for example, algae collection on camera lens [70] and salt accumulation, decreasing the effectiveness of sensors and so forth.
Cost. Finally, the energy requirements and cost of UASNs are high compared to higher power and regular battery replenishing techniques are quite costly.
The amount of challenges in designing of UWSNs makes it an interesting area for researchers to work on. With the advancement in sensor and wireless technologies, UWSNs have attracted a lot of researchers and have contributed significantly to this field. However, the window is still wide open for upcoming research and opportunities.
5. Conclusion
In this paper, we have presented a comprehensive literature review of UWSN applications and their classification. It was observed that a good number of applications are assisted by UWSNs for the harsh underwater environment. UWSN has become one of the prime focuses for researchers. If these applications are properly exploited and catered, a lot of lives, time, and money can be saved. Although UWSNs have seen a tremendous amount of growth in the past few years, there is still a room for ample contributions particularly in the physical deployments of the systems on large scale.
Footnotes
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Acknowledgments
This work is supported by the NSTIP Strategic Technologies Program no. 11-INF1688-10, King Abdul Aziz City of Science and Technology of the Kingdom of Saudi Arabia. The authors thank the Science and Technology Unit for their logistic support.