
Abstract
Bad shunting of track circuit is one of the major risks for railway traffic safety. The occupancy of track will not be correctly detected due to bad shunting, which could severely degrade the efficiency of the train dispatching command, sometimes even causing serious accidents, such as train collision and derailment. To handle the bad shunting problem, the Three Points Test Method is commonly used for detecting track occupancy. However, this method completely relies on manual confirmation and it thus usually leads to low detection efficiency and high labor intensity. In order to improve the detection efficiency and involve as less human labors as possible, this paper proposes a multisensor track occupancy detection model which is based on chaotic neural networks. This model uses the detection results of track occupancy collected by multiple sensors as the fundamental data, and then it calculates their weights using chaotic neural networks for data fusion, and finally the model determines whether the track is occupied. Experimental results and field tests demonstrate that the proposed model is able to provide track occupancy detection with high effectiveness and efficiency. Moreover, the accuracy of detection reaches 99.9999%, which can help to greatly reduce the labor intensity of manual confirmation.
1. Introduction
Nowadays, in the Chinese Railway System, the number of track segments with bad shunting in track circuit is about 36 thousand. Since the track occupancy cannot be detected in these segments, accidents can be caused easily due to early error unlocking of railway routes and halfway switching of the turnout, for example, turnout extruding, train derailment, and side conflict. The problem above results in the safety risks to rail operating, which poses serious threats to the efficiency of rail transportation and has become a major technical problem for the railway system [1–5]. This paper proposes a multisensor technical solution to detect track occupancy, which employs the data fusion approach to combine the detection results obtained by the sensors, and then comprehensively analyzes them to determine whether the track is occupied.
The working conditions of railways are different and complex. In the process of track occupancy collection, the performance of sensors will be affected by installation, climate, electromagnetic environment, and other factors, which may cause data noise and track occupancy detection error. Therefore, to calculate the weights of data from each sensor, different railway working conditions need to be taken into account when performing track occupancy detecting using multisensor information fusion technology. Currently, the commonly used multisensor information fusion technologies mainly include the Bayesian estimation, Kalman filtering, and D-S evidential reasoning [6, 7]. For railway site, there is the interference of the data transmission to a certain extent, a large amount of data to be processed within a short time; these approaches have several drawbacks in terms of information fusion system modeling. They need to build regression function to solve the large-scale matrix equation and are not able to calculate the weights of the data from each sensor accurately for nonlinear system. In contrast, this paper uses the neural network and calculates the weights of data obtained by the sensors according to the history data, which can avoid local optima. This paper improves the conventional neural networks by adding a chaos mechanism to increase its convergence rate and recognition rate. To deal with the problem of bad shunting in track circuit (where uncorrected detections of track occupancy are caused), this paper proposes a multisensor technical solution to detect track occupancy. It employs the chaos neural networks to fuse the data obtained from sensors. The experimental results demonstrate that the proposed detection method is of high accuracy and applicable to the current Chinese railways [8–12].
2. Analysis of Track Occupancy Detection by Sensors
In order to realize track occupancy detection, three kinds of sensors are used, including infrared shooting sensor, proximity switch sensor, and ranging sensor, to detect track occupancy. This section introduces the preliminaries of these sensors for detecting track occupancy.
2.1. Infrared Shooting Sensor
The infrared shooting sensor is used to realize track occupancy via transmitting and receiving infrared signals. Each sensor consists of the transmitter and receiver. If wheels are not busy the receiver can receive infrared rays from the transmitter, which means that the track is idle. On the contrary, if wheels are passing by, the receiver cannot receive the infrared rays sent, which means that the track is occupied.
2.2. Proximity Switch Sensor
Proximity switch sensor is a sensor whose output can deflect the time when the metal objects are approaching to the certain range of the inductive head. The sensor used in this paper has a sensing distance of 2 cm. Sensors of this type are fixed inside the rail and the height from the inner edge of wheels is around 1 cm to achieve the goal of detecting wheels. Other metal objects can be detected within 2 cm, which can reduce the misjudgment caused by other factors and ensure the system reliability.
2.3. Ranging Sensor
Ranging sensor is employed to calculate the distance of detected objects from sensors according to the principle of ultrasonic reflection. Ranging sensors which are fixed at the middle of the trail can calculate the distance among the sensors and the objects for detection. The distance from the underbody of trains to the ground is shorter than 20 cm. Therefore if the objects are detected within 20 cm, it means that the train is passing by, indicating idleness of the track.
With infrared shooting sensor, proximity switch sensor, and ranging sensor, this paper can easily infer whether the object passing by these sensors is a train and realize the detection of track occupancy via the number of train axles. In the actual scene, the detection system can identify objects including train, inspection trolley, person, and animal. Hence, the features of the track-occupying object have to be extracted so as to provide strong evidence for multisensor object recognition.
Based on the information collected by sensors, the velocity, acceleration, area, and frequency of a passing object will be calculated. Then, multisensor information fusion technology is applied to realize track occupancy detection. The detection principle is shown in Figure 1, and the devices installed beside the rail are shown in Figure 2.

Detection principle diagram of sensor information.

Infrared ray sensor devices installed next to the rail.
3. Multisensor Information Fusion Model of Chaotic Neural Networks
The weights of the sensor data play the key role in the multisensor information fusion. Although the adaptive learning function of BP neural networks is the main advantage of neural networks, it is apt to fall into local optima. Therefore, using neural networks separately to achieve multisensor information fusion has, to a certain extent, its limitations [8].
3.1. Traditional BP Neural Network Model
Traditional BP neural network consists of the input layer, the hidden layer, and the output layer. Its weight calculation formula is shown in the following equation:
As shown in (1), J represents the objective function of network learning, n is number of training samples, and η is the learning speed. η is fixed in traditional BP neural networks, where the convergence rate is relatively slow in the flat surface under small η. On the contrary, when η is set to a large value, the shock in canyon area of error surface tends to become big and the BP neural networks are easily trapped into local optima.
3.2. Chaotic Neural Network Model
The chaos mechanism
3.2.1. Improved Weights Correction Algorithm
According to the chaos theory [9]:

The correction formula of the weights in neural networks is given as follows:

3.2.2. Improvement of the Excitation Function in the Hidden Layers
Generally, the excitation function of BP neural networks in the hidden layers always adopts S type function as shown below:

Its derivative is obtained by the following:

The work in literature [13] shows that the adjustment amount of weights between the input layer and the hidden layer has different contribution to network training compared with that of the adjustment amount of weights between the hidden layer and the output layer in the BP algorithm. If the adjustment amount of weights between the input layer and the hidden layer is appropriate and that between the hidden layer and the output layer is too big, the networks are apt to have a big shock. On the contrary, if the adjustment amount of weights between the output layer and the hidden layer is appropriate and that between the input layer and the hidden layer is too small, the convergence rate of the network may be slow. Therefore, to adjust the contributions on the network training with regard to the weights in each layer, the excitation function is improved as below:

Its derivative is shown in the following:

Clearly, parameter λ will affect the form of the S type function. When
3.3. Multisensor Information Fusion Model Based on Chaotic Neural Networks
This section presents how to identify whether the passing objects are trains or not according to the characteristics of the detected targets. The characteristics of the detected targets include the detected targets’ speed, acceleration, sequence of passing infrared ray tube, moving direction, area, and state of track occupancy, which are the input of the neural network. The recognition result is categorized into train and not train, which is the output of the neural network.
According to the characteristics of detected targets, the input of neural networks is expressed as the following matrix:
The output of the neural network is as below:

The network model is shown in Figure 3.

Structure of target recognition based on chaotic neural network.
According to the chaotic network, the learning objective function is shown as

According to the chaotic neural network model, we build the mathematical model with three layers:
input layer: hidden layer: output layer:
where m is the number of nodes in the hidden layer,



4. Simulation and Analysis
To evaluate the validity of the proposed model, 1000 historic samples are obtained from real-site measurement data, including 800 random samples for training neural networks and 200 samples for test.
4.1. Performance Comparison of the BP and Chaotic Neural Networks in Training
The structures of the neural networks are all 6-50-1. That is, there are 6 neurons in the input layer representing the detected target's speed, acceleration, moving direction, sequence of passing infrared ray tube, area, and state of occupied track, respectively, while 1 neuron, as the state of track occupancy, is in output layer. Initially, the weights are identical and selected from the range

Convergence curve of root mean squared error in neural network training.
Simulation results show that the convergence rate of the chaotic neural network is faster than that of the BP neural network. Besides, the chaotic neural network outputs smaller network training error.
4.2. Performance Comparison of the BP and Chaotic Neural Networks in Testing
Here, 200 groups of sample data are used to test the neural network which is completely trained in (1) and compare the performance between the BP neural network and the chaotic neural network. The simulation results are shown in Figures 5, 6, and 7.

Convergence curve of root mean squared error in neural network test.

Test result of BP neural network.
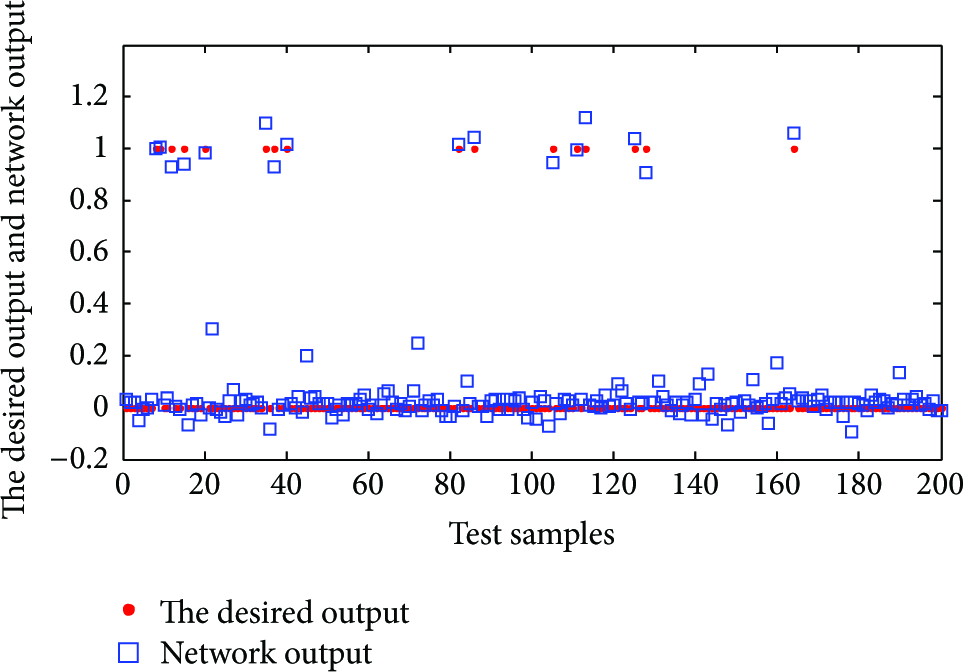
Test result of chaotic neural network.
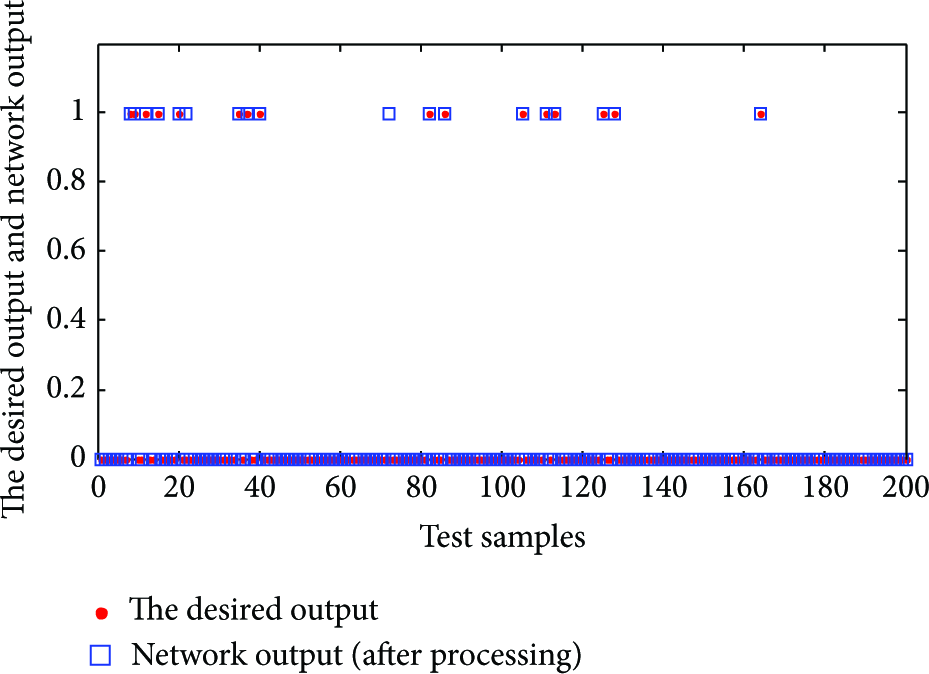
The output of track occupancy model has only two cases, the occupation (output is 1) and the idleness (output is 0). Hence, the output of neural networks is binarized and specified as 1 if it is greater than 0.5 and 0 otherwise. The simulation results of neural networks are illustrated in Figures 8 and 9 and Table 1.
Performance comparison results.

Test result of binarized BP neural network.

Test result of the binarized chaotic neural network.
The results show that (1) after training both BP neural network and the chaotic neural network obtain promising results, very close to the desired output where high test precision and detection accuracy rate are achieved; (2) compared with the BP neural network, the chaotic neural network has faster error convergence rate, higher test precision and detection accuracy rate, and better network performance. Besides, the proposed one is able to detect the track occupancy status with 100% accuracy and meet the requirements of the track occupancy detection model; (3) test speed of neural network is fast enough to meet the real-time requirement of the railway system. Chaotic neural network combines the advantages of randomness and deterministic algorithms. Its optimization process consists of global searching stage and gradient searching stage which can effectively avoid local optima. Randomness guarantees the global searching capability and overcomes the limitations of BP algorithm with uniform distribution as its searching mechanism. In this sense, chaotic neural network retains optimization during searching process. The improved excitation function can enhance speed while maintaining network stability. Therefore chaotic neural network can achieve better simulation results than BP neural network. This paper applies chaotic neural network to the detection of track occupancy. Simulation and experimental results demonstrate that the proposed chaotic neural network can meet the requirement of applications in Chinese railways.
The track occupancy detection solution based on multisensor information fusion technology is tested and validated in the field. It has been evaluated at some railway stations in Hebei province for more than one year. The test results show that it can handle strong distractions caused by harsh environments with response time smaller than 20 ms and accuracy of 99.9999%. The proposed solution complies with the standard of security for SIL-4. The infrared ray tube embedded circuit board and the device installation are shown in Figure 10.

Infrared ray tube embedded circuit board and the device installation.
5. Conclusion
To realize track occupancy detection, this paper applies the chaos mechanism in the weight adjustment and excitation function to create chaotic neural network model based on BP neural networks. A multisensor track occupancy detection model is designed to deal with the problem of bad shunting for track circuits. This model can recognize detected target by analyzing sensor information through BP and chaotic neural networks so as to detect status of the track occupancy. By experiments and onsite verification, the multisensor information fusion for target recognition using chaotic neural network can reach 100% accuracy. Compared with BP neural network, the proposed chaotic neural network has faster convergence and consumes less training time, meeting all system requirements. The multisensor track occupancy detection solution proposed in this paper can solve the bad shunting of track circuit and fulfill the task of the track occupancy detection, which, to a certain extent, has relatively important theoretical and practical values for multisensor information fusion research.
Footnotes
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.