
Abstract
Sensor networks feature low-cost sensor devices with wireless network capability, limited transmit power, resource constraints, and limited battery energy. Cooperative routing exploits the broadcast nature of wireless medium and transmits cooperatively using nearby sensor nodes as relays. It is a promising technique that utilizes cooperative communication to improve the communication quality of single-antenna sensor nodes. In this paper, we propose a cooperative transmission scheme for underwater sensor networks (UWSNs) to enhance the network performance. Cooperative diversity has been introduced to combat fading. Cooperative UWSN (Co-UWSN) is proposed, which is a reliable, energy-efficient, and high throughput routing protocol for UWSN. Destination and potential relays are selected that utilize distance and signal-to-noise ratio computation of the channel conditions as cost functions. This contributes to sufficient decrease in path losses occurring in the links and transferring of data with much reduced path loss. Simulation results show that Co-UWSN protocol performs better in terms of end-to-end delay, energy consumption, and network lifetime. Selected protocols for comparison are energy-efficient depth-based routing (EEDBR), improved adaptive mobility of courier nodes in threshold-optimized depth-based routing (iAMCTD), cooperative routing protocol for UWSN, and cooperative partner node selection criteria for cooperative routing Coop (Re and dth).
1. Introduction
UWSN forms an emerging technology that promises to enable or enhance several key applications in oceanic research. These include data collection, pollution monitoring, tactical surveillance, and disaster prevention. Unlike conventional terrestrial sensor nodes, a large number of underwater mobile sensor nodes are dropped to the venue of interest to form a Sensor Equipped Aquatic (SEA) Swarm. Each sensor is equipped with a low bandwidth acoustic modem and a single antenna. It can control its depth through a fishlike bladder apparatus and a pressure gauge. The swarm is escorted by sinks also known as sonobuoys at the sea surface that are equipped with both acoustic and radio communications. Each sensor, in a SEA Swarm architecture, monitors local underwater activities and reports time-critical data to any one of the sinks at the surface of the water using acoustic multihopping.
The main focus of this paper is to design an efficient routing protocol that transmits data reliably from a mobile sensor to any one of the sinks on the sea surface. However, this is a challenging task due to noisy environment and limited energy and bandwidth resources. An underwater acoustic (UWA) channel has low bandwidth and propagation latency five orders of magnitude higher than those of the radio channel. Acoustic transmissions consume much more energy than terrestrial microwave communications. These limitations make the network vulnerable to congestion due to packet collisions. Under these circumstances, minimizing the number of packet transmissions is important for not only minimizing congestion but also reducing energy consumption.
Cooperative routing is one of the solutions to this problem, through which information loss is avoided by exploiting broadcast nature of wireless link. Such a routing makes use of multicast mode in which a single source node transmits its data to more than one node by exploiting more than one link at the same time. Designing an efficient cooperative routing protocol may lead to a significant increase in network throughput.
In this paper, we propose a new cooperative routing protocol Co-UWSN and compare its working with other noncooperative routing protocols. Cooperative routing in wireless networks has recently gained much attention due to its tendency to exploit the broadcast nature of the wireless medium in designing energy-efficient routing algorithms. This type of routing scheme allows more frequent data gathering due to support of neighbouring nodes; hence data loss is least expected. Transmissions from different nodes are generally affected by different and statistically independent fading. Hence, the final destination node can combine the received signals using traditional combining methods such as fixed ratio combining (FRC), maximal ratio combining (MRC), or selection combining (SC) and obtain diversity against the harming effects of fading. Diversity obtained through multipath transmissions is referred to as cooperative diversity. It is a powerful technique to increase robustness against channel fading.
The proposed model, Co-UWSN, guarantees higher throughput and minimum energy consumption with the introduction of the cooperation at the node level. A detailed mathematical model is also presented in this paper which is based on a linear three-node arrangement in which amplify-and-forward (AF) technique is employed at the relay and fixed ratio combining (FRC) is utilized at the destination. Certain losses occurring in the underwater environment are also considered in this model.
The rest of the paper is organized as follows. Section 2 provides some related work. Section 3 describes the motivation behind this research. Section 4 describes the characteristics of an underwater acoustic channel and the noise effects present in this channel. A model of the proposed protocol is presented in Section 5. Simulations results are shown in Section 6 and conclusion is given in Section 7.
2. Related Work
Earlier attempts to analyze UWSN behavior were based on the technology developed for terrestrial WSNs. Despite similar functionality, the design of appropriate network architecture for UWSNs is complicated by the conditions of communication system and, as a consequence, the overall network is required to supply an appropriate network service for the demanding applications in such an unfriendly submarine communication environment.
As delay-tolerant applications are the major intention of UWSN, the notable proposals in underwater routing protocols investigate the lack of global load balancing in the network to obtain extended lifetime of network. An efficient technique in localization-free category is depth-based routing protocol (DBR) [1], based on data forwarding through low-depth sensor nodes. Energy-efficient depth-based routing (EEDBR) scheme [2] is a constructive framework for maximizing the network lifetime by utilizing both depth and residual energy of the sensor nodes. It minimizes the end-to-end delay along with better energy consumption of the low-depth nodes. Both of these techniques attempt to deal with minimizing the load on medium-depth sensor nodes in dense conditions. There is a lack of load balancing in these protocols due to unequal load distribution among the nodes. H2-DAB [3] implements the dynamic addressing scheme among sensor nodes without requiring the localization information. Another efficient scheme for UWSN, Coop (Re and dth) [4], employs cooperative routing which involves data transmission via partner node/relay towards sink. In this paper, two different partner node selection criteria are implemented and compared. The authors have considered source node depth threshold (dth), potential relays depth, and residual energy (Re) as one criterion and signal-to-noise ratio (SNR) of the link connecting source node with relay or destination as another criterion for selection parameters.
In [5], a communication path-based routing protocol by the name of relative distance-based forwarding (RDBF) is presented which aims to provide transmission efficient, energy-saving, and low delay routing. The authors utilize a fitness factor to measure and judge the degree of appropriateness for a node to forward the packets. Only a small fraction of nodes are involved in forwarding process, which reduce the energy consumption and end-to-end delay. RDBF also controls the transmission time of multiple forwarders to reduce the redundancy. In [6], the authors have addressed the problems of localization by expressing underwater transmission loss via the Lambert W function. Real device implementation demonstrated the accuracy and efficiency of the proposed equation in distance calculation, computation stability, and shorter processing time. The simulation results show that Lambert W function was more stable against errors than Newton-Raphson inversion.
Another study proposes a clustering scheme in [7] that promises to overcome the UWSN confines by resolving the transmission of redundant data in the network. The protocol works in rounds, with each round consisting of four phases, utilizing suitable mechanisms in each round. The proposed clustering scheme promises to reduce network consumption and increase network throughput. Moreover, the minimum percentage of received data at the base station is also guaranteed. The research paper in [8] tackles the problem of tracking underwater moving targets. For three-dimensional underwater maneuvering target tracking, the interacting multiple model method is combined with the particle filter to cope with uncertainties. Simulation results show that the proposed method is a promising substitute for traditional imaging-based or sensor-based approaches.
In [9], the author proposes cooperative communication routing protocol based on both energy consumption and QoS. The QoS is measured by absolute received signal strength indicator (RSSI). To integrate these two parameters in the routing protocol, a competitive/opponent mechanism is implemented at each node by utilizing multiagent reinforcement learning (MRL) algorithm. The proposed algorithm ensures better performance in terms of end-to-end delay and packet loss rate, taking into account the consumed energy by the network. The main idea of cooperative communication is to utilize the resources of more than one node to transmit data. Thus, by sharing resources between nodes, the transmission quality is enhanced. ACOA-AFSA fusion routing algorithm is proposed in [10] which possesses the advantages of artificial fish swarm algorithm (AFSA) and ant colony optimization algorithm (ACOA). The fusion algorithm reduced the existing routing protocols transmission delay and energy consumption and improved routing protocols robustness theoretically. The remotely powered underwater acoustic sensor networks (RPUASN) paradigm is introduced in [11], whereby sensor nodes harvest and store the power supplied by an external acoustic source, indefinitely extending their lifetime. The required number of RPUASN nodes and the volume which was guaranteed to be covered by the nodes were analyzed in terms of electrical power, range, directivity, transmission frequency of the external acoustic source, and node power requirements.
Authors in [12] investigate a mobicast or a mobile geocast problem in three-dimensional UWSNs which aim to overcome the hole problem and minimize the energy consumption of the sensor nodes while maximizing data collection. An “apple-slice technique” is used to build multiple segments to surround the hole and to assure routing path continuity. Simulation results illustrate the performance improvement in successful delivery rate, power consumption, and message overhead. The research in [13] proposes a time-based priority forwarding mechanism and utilized downstream node table to prevent flooding. A credit-based routing table update mechanism is adopted to avoid energy consumption caused by frequent update of routing table. The simulation results show that the routing protocol could achieve excellent performance in terms of packet delivery ratio, energy consumption, and average end-to-end delay.
In [14], the authors have presented a comprehensive measurement of path-loss and fading characteristics for surface-level sensor nodes in the 400 MHz band in both flat and irregular outdoor terrains and proposed a new mathematical path-loss SLIT model. Researchers in [15] address the challenges faced in an UWA environment and the advancements being in progress. According to them, due to the cost of sea trials and the lack of standards, there are no operational underwater networks, but only experimental demonstrations. Capacity of an acoustic network is a major question to be answered. Efficient and scalable protocols are needed if bigger deployments are to be expected. Authors in [16] derive a cut-set upper bound on the capacity scaling. They show that there exists either a bandwidth or power limitation, according to the path-loss attenuation regimes, thus yielding the upper bound that follows three different information transfer arguments. Also, an achievable result based on the multihop transmission is presented for dense networks.
A novel approach to localization and mapping of a school of wirelessly connected underwater robotic fish (URF) was presented in [17]. It was based on both cooperative localization particle filter (CLPF) scheme and occupancy grid mapping algorithm (OGMA). Using the probabilistic framework, CLPF had the major advantage that no prior knowledge about the kinematic model of URF was required to achieve accurate 3D localization. Results verified the feasibility and effectiveness of the proposed strategy. In [18], the authors proposed a contention-free multichannel MAC protocol for UWSNs that works well even when nodes experience uneven and bursty traffic loads. Simulation results verified that the protocol conserved energy and was extremely suitable for a heavy-loaded environment. In [19], the authors have proposed a forwarding-function-based routing protocol, improved adaptive mobility of courier nodes in threshold-optimized depth-based routing (iAMCTD), for UWSNs. It maximizes the lifetime of reactive UWSNs by optimized mobility pattern of sink.
In [20], the authors describe physical layer of a new acoustic modem called ITACA for UWSN. The modem architecture includes an ultralow power asynchronous wake-up system implementation for UWA transmission based on a low-cost off-the-shelf radiofrequency identity peripheral integrated circuit. This feature enables a reduced power dissipation of 10 W in standby mode and registers very low power values during reception and transmission. The modem also incorporates clear channel assessment (CCA) to support CSMA-based medium access control (MAC) layer protocols. Application-oriented UWSNs are planned to achieve certain objectives in [21]. In this paper, the authors propose chain-based routing schemes for application-oriented cylindrical networks and also formulate mathematical models to find a global optimum path for data transmission. After finding local optimum paths in separate chains, they try to find global optimum paths through their interconnection and develop a computational model for the analysis of end-to-end delay. The 4-chain-based scheme performs better than the other two chain-based schemes due to better load balancing and optimal neighbor selection among the sensor nodes. In [22], the authors introduce the prototype of an aquatic sensor node equipped with an embedded camera. Based on this sensing platform, the authors propose a fast and accurate debris detection algorithm, based on compressive sensing theory to consider the unique challenges in UWA environments. They used an efficient sparse recovery algorithm in which a few linear measurements need to be transmitted for image reconstruction. The experimental results demonstrate that their approach is reliable and feasible for debris detection using camera sensors in underwater environments.
In [23], the authors propose two localization algorithms based on color filtering technology called projection-color filtering localization (PCFL) and anchor-color filtering localization (ACFL). Both algorithms aim at collaboratively accomplishing accurate localization of UWA nodes with minimum energy expenditure. They both adopt the overlapping signal region of task anchors which can communicate with the mobile node directly as the current sampling area. PCFL employs the projected distances between each of the task projections, while ACFL adopts the direct distance between each of the task anchors and the mobile node. By comparing the nearness degrees of the RGB sequences between the samples and the mobile node, samples can be filtered out. The normalized nearness degrees are considered as the weighted standards to calculate coordinates of the mobile nodes. Simulation results show that the proposed methods have excellent localization performance and can timely localize the mobile node. In [24], an analysis of performance of UWA networks is presented in the presence of interference. The node-to-node channel is modeled using frequency-dependent path loss and Rician fading. The authors adopt a communication theoretic approach and study the number of hops through the network as an indicator of connectivity, along with power and bandwidth requirements. They show that a desired level of connectivity can be achieved through a judicious selection of the operating frequency, power, and bandwidth. They propose a hierarchical UWA sensor network architecture in which the sensors and the collector stations operate in distinct layers. The sensors and the collector stations are consequently allocated different operating frequencies. The analysis is performed under the assumption that there is interference from other nodes within the same layer of the hierarchy.
In [25], the authors show that acoustic sensors deployed on the sea floor can be localized using a broadband sound source travelling along a linear trajectory at a constant velocity and a constant depth below the sea surface. They show that the projection of the source trajectory onto the
3. Motivation
In most applications the network consists of battery-powered nodes. Due to low transmit power, these nodes have limited communication range. Thus, cooperative communication, in which nodes share their resources, is essential for these networks. Replacing long and weaker links with short and stronger links can reduce the burden on the link. Alternative routes between the users and the base-station provide robustness against shadowing and multipath fading and introduce new design options for scheduling and routing.
In Co-UWSN protocol, a cooperation-based mechanism is proposed to route data through underwater networks with minimum path loss over the link; and the merits of single-hop and multihop are utilized. The proposed scheme uses a cost function to select the most appropriate route to sink. This cost function is calculated on the basis of their distance from the sink and their residual energy. The channel for acoustic link is described by path-loss model in terms of frequency and distance. Simulation results show that Co-UWSN protocol has considerably enhanced the network stability time with reduced effects of path loss.
EEDBR uses local depth information along with residual energy of sensor nodes to select the optimal forwarder for achieving load balancing. Redundant transmissions are controlled by introducing holding time for forwarding nodes. It is a receiver-based approach in which the nodes having smaller depth participate in forwarding the data packets. But redundant transmissions consume a lot of energy. EEDBR is a noncooperative routing protocol. Hence, data is routed from source to destination over a single noisy link in a multihop fashion. Due to noise and multipath fading in underwater environment, signal suffers high bit error rate (BER). In iAMCTD, a routing scheme is proposed to maximize the lifetime of reactive UWSNs. iAMCTD considers signal quality along with residual energy as routing metrics. It is a network prototype in localization-free and flooding-based routing for underwater applications. It improves the network throughput and largely minimizes packet drop ratio by using its formulated forwarding functions. iAMCTD faces redundant transmissions which result in major energy consumption. Coop (Re and dth) aims to solve the issues of EEDBR and iAMCTD via cooperative diversity. This protocol involves data transmission through the use of partner nodes/relays that cooperatively forward data to the destination. It increases the rate of successful data delivery to the destination because, in case of link failure, at least one link is capable of delivering the data successfully to the destination. The scheme considers a node link state information along with its depth and residual energy as selection parameters. So, Coop (Re and dth) is consuming more transmission energy than iAMCTD and EEDBR. This shows the tradeoff between energy conservation and reliability. Also, the protocol does not consider any transmission impairments present in the underwater environment. In order to address the issues of all these three protocols, we have tried to propose a new protocol by the name of Co-UWSN.
The paper considers a distributed UWA environment in the ocean, where the channel is heavily affected by multipath fading. Data packets from sensor nodes arrive at the sink which further communicate with the onshore base station through long range radio frequency link. Each node can monitor and detect events from local environment in many applications such as oceanographic data collection, environmental monitoring, and climate recording. Signal may be modeled by a Rayleigh random variable. The presented scheme leads to enhancing the reliability of the underwater channel through cooperative transmission scheme. In this research we shall be considering FRC for signal combining. Cooperative diversity is a kind of spatial diversity that can be obtained without the use of multiple antennas. It is especially useful when time, frequency, and spatial diversity through multiple antennas are not feasible. This motivated us to introduce the cooperation in UWA environment and study its impact on system performance.
4. Underwater Acoustic Channel
Simulating UWSN communications requires modeling the acoustic wave propagation while a sensor node in UWA tries to transmit data to another one. Several models are proposed in the literature from simplest ones based on sound propagation theory to more elaborated and complex models based on the physics of acoustic sound propagation.
4.1. Attenuation and Propagation Delay
Sound propagates in the underwater environment at approximate speed of


4.2. Noise Presence in Underwater Channels
Assuming the absence of site-specific noise, the receiver is affected by colored ambient noise only, with its overall power spectral density in units of dB re μ Pa (i.e., in decibels relative to a micro Pascal) in kHz. Underwater communication is affected by many sources such as turbulence


4.3. SNR in Underwater Channels
The SNR characteristic of a narrowband signal with transmit power P

It is assumed that the noises follow Gaussian distribution and the channel is stable for some interval of time that is known as the coherence time. The channel capacity of a Gaussian channel with infinite bandwidth represents the upper bound on the amount of information that can be transmitted successfully over a communication channel. This can be expressed by the Shannon-Hartley theorem [31]:


This condition may be used to assess the quality of incoming signal at the receiver side. This approximates the link efficiency in wireless systems without any requirement in complex coding, detecting, and decoding procedures [31]. Signals in UWA channels represented by

5. Co-UWSN: The Proposed Protocol
A node that uses cooperation shares its data packet with its neighbour nodes, and a group of these nodes can transmit the packet to the intended receiver or destination. The destination node can use a physical-layer diversity combining scheme to combine multiple signals. Cooperative routing improves SNR over the traditional single-input single-output (SISO) case, which does not utilize cooperation. This SNR improvement can save transmit power, increase data rate, and extend the communication range. The aim of the paper is to apply multihop networking in UWA environment through the use of cooperation. In this paper, we are considering a simple network model, in which data packets originating from a source node at the base of the river bed are forwarded hop by hop to a destination node at the surface of the sea. A relay node is employed at the joint of every two consecutive hops. It receives the incoming packets, amplifies them, and retransmits them onto the destination.
5.1. Network Topology
Network capacity, energy consumption, and the reliability of a network depend on network topology. Multihop communication is used as the maximum transmission range of a sensor node is not long enough to cover the entire network. Sensed data from the source node is gathered at one of the sinks. It is considered that sink has no energy constraint that may communicate with any of the nodes without cooperation. Nodes except for sink nodes are energy constrained. Network is assumed to be divided into layers going deep into underwater and is composed of heterogeneous nodes, as shown in Figure 1, with each node having only one antenna. The yellow coloured nodes are advanced nodes having more energy than the normal nodes which are white in color. The source nodes are transmitting the data to the higher level nodes as well through the relay nodes shown in yellow color. The process goes on till the data reaches the sink at the surface of the water. The relay nodes are advanced nodes as they have the dual responsibility of data relaying of the neighbor nodes and the transmission of their own data. In case of normal data, the source node data always follows the relay node path in a cooperation mode, but if the relay node link is not reliable or the relay node is dead, then there is a direct link path available for the data transfer.
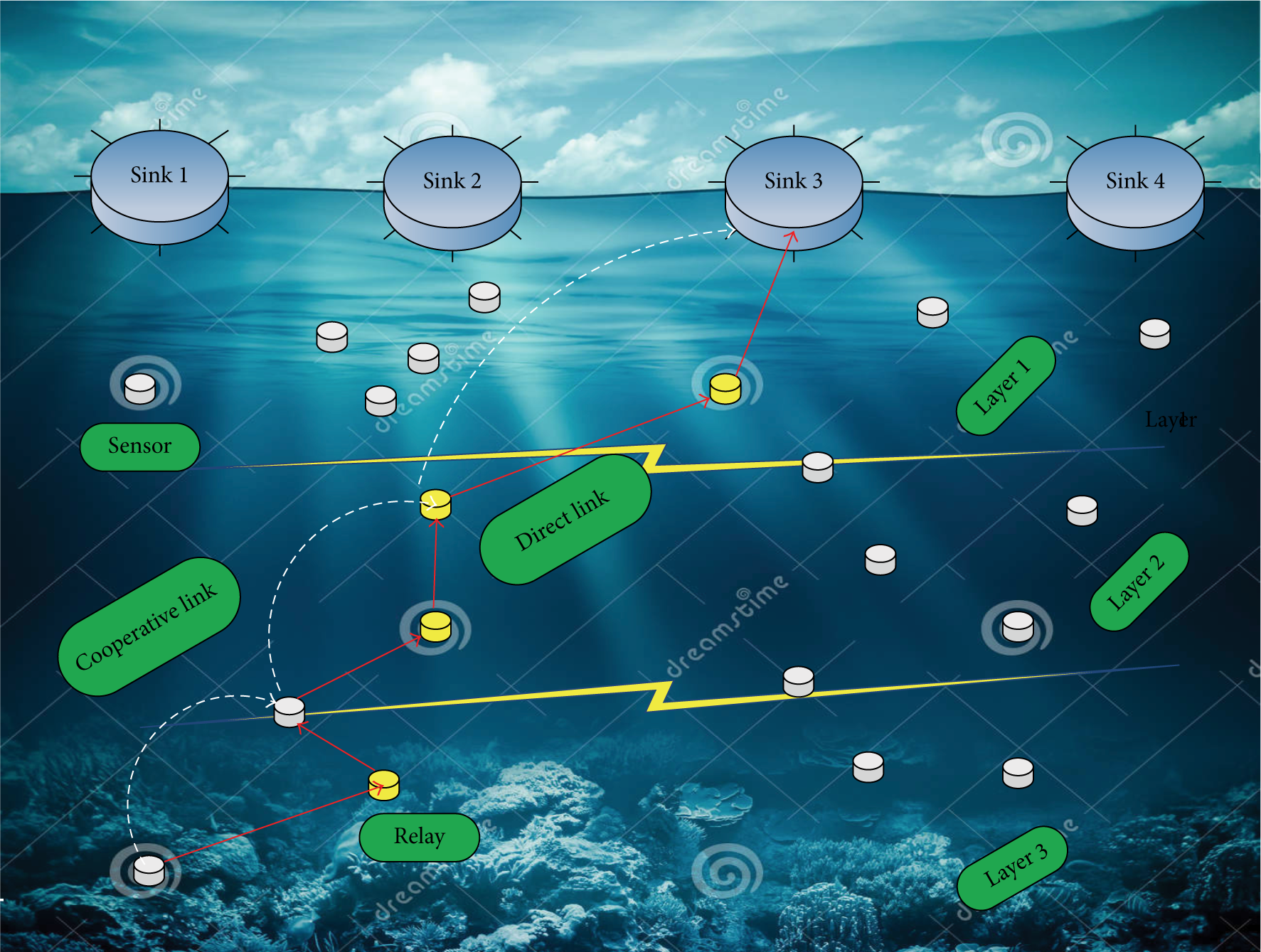
Nodes' deployment in an underwater environment.
5.2. Initialization Phase
Three different types of tasks are performed in this phase; each node is informed about its neighbors, location of sinks on the surface of water is identified, and all the possible routes to various sinks are also evaluated. Sensors update their depth to their neighbors and sinks when each node broadcasts an information packet containing its node ID, depth, and energy status. Sink sends hello packet to all the nodes to get their vital information. Employing hello packets transmission, each node identifies its neighbors in transmission range and maintains the separate queue of neighbors under depth threshold to identify the finest forwarder for its data transmission. Each node calculates its weights using the formula given below:

In cooperative networks, the source node is in charge of selecting the cooperators also known as relays. It is also in charge of sharing its data with the selected relay and doing the cooperative routing. The maximum number of cooperating nodes

Flow chart for the Co-UWSN scheme.
5.3. Cooperation Phase
A two-phase transmit scheme is considered as shown in Figure 3 which allows a nonoverlapping transmission for source node and relay node. The whole process of cooperation is done in two phases. In phase 1, one of the sources



Linear three-sensor-node system model.
In phase 2, the relay forwards the amplified symbol with power

Destination node
5.4. Relay Selection and Routing Phase
A source node
If multiple relay nodes are available in the path and a source node has a sink node as its next-hop node, then a relay node will never trigger cooperation. It will help to maximize the minimum residual energy left after data transmission. This can be accomplished through the following condition:

5.5. Relay Strategy
We are considering AF technique at the relay node

This relay gain is also called channel state information (CSI) assisted AF relay gain since the relay node requires estimating the instantaneous channel information of the S-R channel. The gain provides amplification at R to counter the effect of the channel fading and prevents the relay gain from saturating when the

Fading is generally independent of time; therefore

Hence, accordingly the signal received at D in phase 2 can be rewritten as

5.6. Combining Strategy
Each destination node D implements a diversity combining technique to combine the received signals coming from S and R. Here FRC is used as the combining strategy. In FRC, instead of just adding up the incoming signals, they are weighted with a constant ratio. This ratio should reflect the average channel quality and influences on channel due to shadowing and other effects. In case of a single-relay node, FRC can be expressed as


An optimal value of the weights ratio is

If the transmitted symbol

6. Performance Evaluation of Co-UWSN
Key performance metrics for both protocols are defined in the following subsections.
6.1. Performance Metrics
6.1.1. Stability Period
It is a time span of network operation from start of network till death of the first node. Time period after the death of first node till the death of last node is termed as unstable period.
6.1.2. Residual Energy
It is the difference between initial energy and utilized energy of nodes during network operation.
6.1.3. Network Lifetime
It is defined as the total network operational time.
6.1.4. Throughput
Total number of packets successfully received at sink is called throughput.
6.1.5. Delay Spread
Delay spread is a measure of the multipath richness of a communication channel. It is the arrival time difference between the earliest multipath component and the latest multipath component of the received signal.
6.1.6. Packet Delivery Ratio
Packet delivery ratio (PDR) is defined as the ratio of data packets received by the destination to those generated by the source.
6.1.7. Transmission Loss
It shows the average transmission loss between a source node and sink in one round. It is measured in decibels (dB).
6.2. Results and Discussions
To evaluate the performance of Co-UWSN, it is compared with the existing schemes of EEDBR, iAMCTD, and Coop (Re and dth). In the simulation of 10000 rounds, nodes have been deployed randomly in every simulated technique. By following multiple-sink model of conventional methods with 5 sinks deployed on the surface of the water, 225 nodes are randomly deployed in the network field of 500 m × 500 m. In each round, all alive nodes transmit threshold-based data towards sink. Each node shares the vital physical metrics, like depth threshold and weight, with its neighbors to keep informed with the changing circumstances of the network. After every 100th round, nodes compute their distance from the neighbor nodes. Source nodes transfer their data to the upper layer using cooperation of neighbor nodes till the data reaches sink. The sink supervises the depth thresholds and adaptive mobility of cooperating nodes. Introduction of cooperation, cooperative diversity, and variations in depth threshold makes Co-UWSN scheme a feasible contender for data as well as time-critical applications.
Figure 4 represents a comparison between the end-to-end delay of Co-UWSN, iAMCTD, EEDBR, and Coop (Re and dth). The results comprise on the average 3 simulation runs of the under-consideration techniques. Their comparisons show that end-to-end delay of network in Co-UWSN is less than the other three techniques due to minimum forwarding distances between the nodes in both dense and sparse conditions. In iAMCTD, delay is much higher in final rounds due to distant data forwarding. It increases gradually with the sparseness of the network after about 4000 rounds and the network causes data forwarding at minimum distance. End-to-end delay in iAMCTD is better than EEDBR as both threshold variations and weight functions perform load balancing. But in Coop (Re and dth), there is a minimum possible time lag due to consideration of SNR, depth threshold between sender and relay nodes, and introduction of cooperation. iAMCTD and EEDBR forward packets with minimum hops but the low quality UWA channel can increase packet loss at the destination; therefore the packets need to be retransmitted. This intensifies the end-to-end packet delay. While all the four schemes are based on channel estimation, packets are forwarded with higher reliability, leading to lower retransmissions, especially in the case of the cooperative schemes Coop (Re and dth) and Co-UWSN. Hence, the packets reach the sink with a lower delay in Co-UWSN as it also considers the transmission impairments in case of underwater channels. Table 1 indicates a numerical comparison of all the four compared protocols in terms of end-to-end delay.
End-to-end delay after equal intervals.


End-to-end delay versus network lifetime.
Figure 5 illustrates that Co-UWSN scheme improves the stability period of network by avoiding the forwarding of redundant and unnecessary data along with maintaining lower transmission loss. In the simulations of 10,000 rounds, first node in EEDBR dies at 1185th round, in iAMCTD it dies at 3185th, and in Coop (Re and dth), it dies at 3275th round whereas in our scheme it dies at 6225th round, thereby increasing the stability period. In other words we can say that the instability period starts from almost the 6200th round. Due to the introduction of cooperation scheme, load balancing is achieved, thereby increasing the stability period. The cooperating nodes share the load of data forwarding of distant transmissions. In Co-UWSN, there are two selection attributes for forwarding: depth and residual energy. This consideration causes a trade-off between the network lifetime and transmission loss which is not suitable for reactive applications. Cooperation between nodes causes load balancing both in Co-UWSN and Coop (Re and dth). During the instability period, network gradually becomes sparse causing load on high residual energy nodes, whereas the number of neighbors is managed by variations in depth threshold.
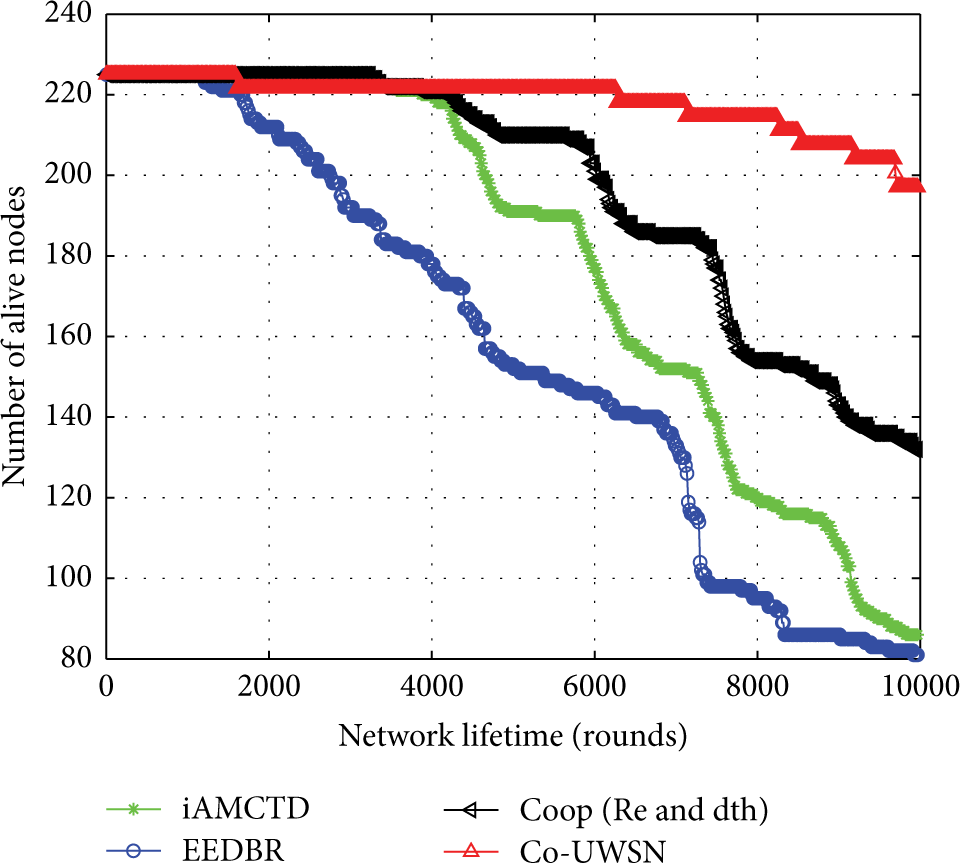
Number of alive nodes versus network lifetime.
After the expiry of initial nodes, the network destabilizes due to shortage of eligible neighbors. The stability period of iAMCTD is greater than EEDBR, as there is gradual increase in network energy consumption. When the network becomes sparse, the number of neighbors decreases quickly in EEDBR causing network instability. In iAMCTD, the consideration of two forwarding attributes, depth and residual energy, causes a trade-off between the network lifetime and transmission loss which is not suitable for reactive applications. Lifetime of iAMCTD is increased compared to EEDBR due to lower throughput by responsive network. Moreover, it provides minimum transmission loss and delay which is specifically suitable for time-decisive applications. During the instability period of iAMCTD, network gradually becomes sparse causing load on high residual energy nodes, whereas the number of neighbors is managed by variations in depth threshold. Lifetime of Co-UWSN is increased due to lower throughput by responsive network. In our suggested scheme, employment of Thorps energy model specifies the detailed channel losses, useful for selective data forwarding in responsive networks. Increase in stability period also confirms reduction in redundant transmissions. Table 2 indicates a numerical comparison of all the four compared protocols in terms of alive nodes after equal intervals of rounds.
Alive nodes available after equal intervals.

The plots in Figure 6 show the PDR comparison of Co-UWSN with that of the other aforementioned techniques. Performance of the EEDBR is reduced whereas the delivery ratios of iAMCTD and Co-UWSN show a similar pattern of plots, although the drop in PDR in Co-UWSN is much less than that of iAMCTD. When the packet interarrival time is small, the higher traffic is sent from source nodes. This increases packet collision leading to a lower packet delivery ratio. CO-UWSN scheme improves the possibility of receiving packets successfully by forwarding packets on multiple paths and combining at receiver node. A larger number of cooperating nodes are available for data forwarding; higher reliability can be achieved as can be seen in Figure 6. EEDBR has higher loss than other techniques as it employs distant propagations as well as multiple forwarding and hence a lower PDR. In iAMCTD, channel loss conditions are better than EEDBR, as the weight function computations consider both depth and residual energy of forwarding nodes; therefore the propagations remain stable. But in later rounds, the performance of iAMCTD gradually decreases with the decrement in qualified forwarders; therefore both the packet loss and delay increase and there is a drop in its PDR. Coop (Re and dth) scheme shows a similar type of rise-fall behaviour in case of PDR because the scheme does not consider the channel conditions as well as the SNR of the link and the throughput decreases due to quick fall in network density. Table 3 shows a numerical comparison of all the four compared protocols in terms of PDR after equal number of rounds.
Packet delivery ratio after equal intervals.


Packet delivery ratio versus network lifetime.
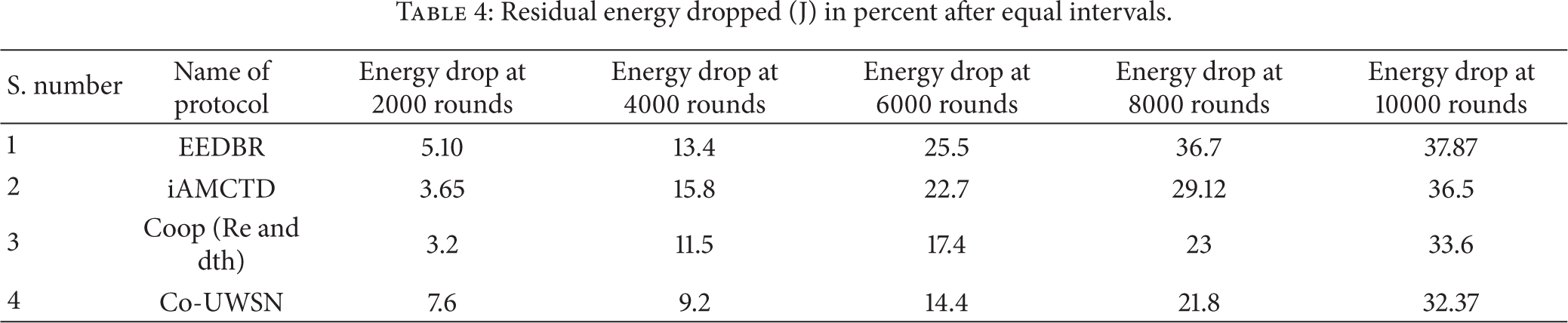
Figure 7 describes the comparison between the average energy consumption of Co-UWSN and the other three schemes. In our scheme, energy utilization of sensor nodes is much efficient because the use of cooperation makes the data forwarding better with the help of neighbor nodes and load balancing is achieved. Also effective weight implementation and slighter data forwarding further help in the improvement of energy consumption. Co-UWSN is mainly concerned with the requirement of time-critical applications and hence addresses the problem of energy consumption by utilizing cooperation and depth difference between data forwarders. In iAMCTD, nodes consume high energy due to larger distance between nodes; however, in EEDBR, energy consumption is higher than that in other techniques due to frequent selection of high energy nodes. In Coop (Re and dth), there is a sudden increase in network energy consumption during the initial rounds as all nodes become active and perform the routing process. Later on, energy consumption decreases because nodes fail to find relay nodes due to reduction in network density. Hence, chances of cooperative routing being performed by any source node are reduced which in turn reduces energy consumption. Table 4 highlights a comparison of residual energy left, in percentage, of all the four compared protocols after equal intervals.
Residual energy dropped (J) in percent after equal intervals.

Total energy consumption versus network lifetime.
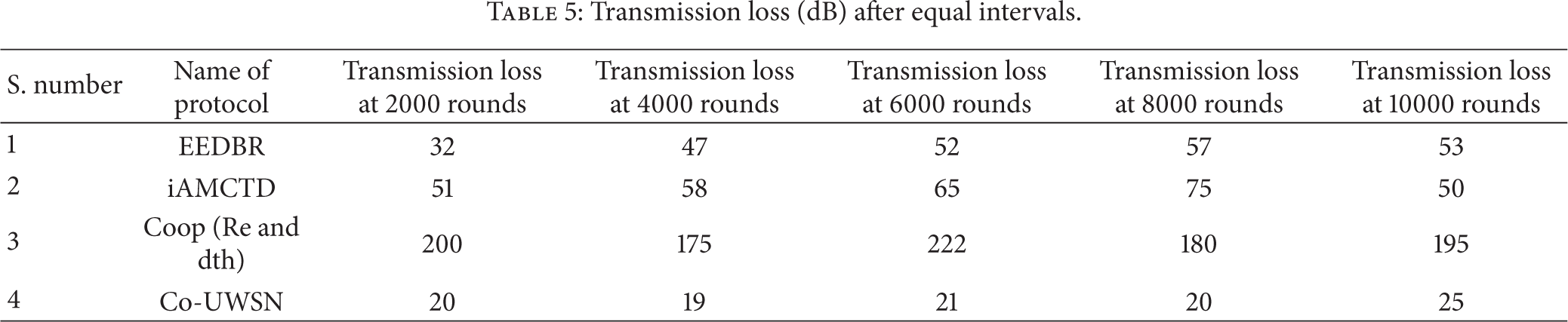
Figure 8 shows that transmission loss of the network in Co-UWSN is much less than the previous techniques due to prioritization of relay strategy, cooperation role, and SNR in the model design of our protocol. Higher throughput in iAMCTD is achieved in compromise of transmission loss as the number of redundant transmissions between sender nodes and sink is increased. In EEDBR multiple transmissions increase transmission loss between sender node and the sink. Our scheme utilizes Thorps attenuation model for UWA to calculate the transmission loss in packet forwarding between a source node and sink. It considers transmission frequency, noise density, and bandwidth efficiency which scrutinize the signal quality during data transmission. Coop (Re and dth) has higher loss than other techniques as it employs distant propagations as well as multiple forwarding. In EEDBR, the initial rounds show low losses due to high network density, but as the network becomes sparse, there is a sharp decrease in network performance causing high packet loss. In iAMCTD, channel loss conditions are better than EEDBR and Coop (Re and dth), as the weight function computations consider both depth and residual energy of forwarding nodes; therefore, the propagations remain stable. In later rounds, the performance of iAMCTD gradually goes down with the decrement in qualified forwarders; therefore, both the packet loss and delay increase. Table 5 indicates a numerical comparison of all the four compared protocols in terms of transmission loss after equal rounds traversed.
Transmission loss (dB) after equal intervals.

Transmission loss versus network lifetime.
6.3. Performance with Trade-Offs
In our scheme of Co-UWSN, improvement in end-to-end delay is achieved at the cost of time lag. The end-to-end delay of the network in Co-UWSN is improved compared to iAMCTD, EEDBR, and Coop (Re and dth), but at the cost of possible time lag due to consideration of SNR and cooperation mechanism. In EEDBR, delay is improved at the cost of repeated transmissions. The delay in EEDBR is much higher in initial rounds due to distant data forwarding but at the cost of redundant transmissions because the low-quality underwater channel can increase packet loss at the destination. In iAMCTD, end-to-end delay is improved at the cost of energy depletion. End-to-end delay in iAMCTD is better than EEDBR as both threshold variations and weight functions perform load balancing but at the cost of sharp energy depletion of the nodes. End-to-end delay in Coop (Re and dth) is improved but at the cost of energy consumption and transmission loss.
In Co-UWSN, the stability period is improved at the cost of more forwarding nodes and energy consumption. Our scheme improves the stability period of network by avoiding the forwarding of unnecessary data along with maintaining lower transmission loss but at the cost of utilization of relay nodes and proper selection of relay forwarding nodes. In Co-UWSN, the instability period starts from almost the 6220th round, after which the packet delivery ratio remains even; however total energy consumption increases slowly. In iAMCTD, the stability period is achieved at the cost of transmission loss. In this protocol, there are only two forwarding selection attributes: depth and residual energy. This consideration causes a trade-off between the network lifetime and transmission loss which is not suitable for reactive applications. During the instability period of iAMCTD, network gradually becomes sparse causing load on high residual energy nodes. In EEDBR, the stability period is improved at the cost of greater energy consumption. In Coop (Re and dth), the stability period is improved at the cost of end-to-end delay and transmission loss.
In Co-UWSN, PDR is improved at the cost of time-lag. The drop in PDR in Co-UWSN is much less than that of other schemes. When the packet interarrival time is small, higher traffic is sent from source nodes. This increases packet collision leading to a lower packet delivery ratio. Co-UWSN scheme improves the possibility of receiving packets successfully by forwarding packets on multiple paths and combining at receiver node. This reduction in packet delivery ratio is achieved at the cost of higher energy consumption of the network as more nodes are involved in the data forwarding mechanism. In EEDBR, transmission loss improved at the cost of low PDR. In this protocol, higher transmission loss is achieved compared to the other two techniques as it employs distant propagations as well as multiple forwarding. iAMCTD achieves improvement in PDR at the cost of packet loss and delay. In iAMCTD, channel loss conditions are better than EEDBR, as the weight function computations consider both depth and residual energy of forwarding nodes; therefore the propagations remain stable. But, in later rounds, the performance of iAMCTD gradually decreases with the decrement in qualified forwarders; therefore both the packet loss and delay increase but at the cost of drop in its PDR. Table 6 indicates the various performance parameters which are enhanced on the price which they have to pay for the four compared protocols.
Performance parameters with their trade-offs.
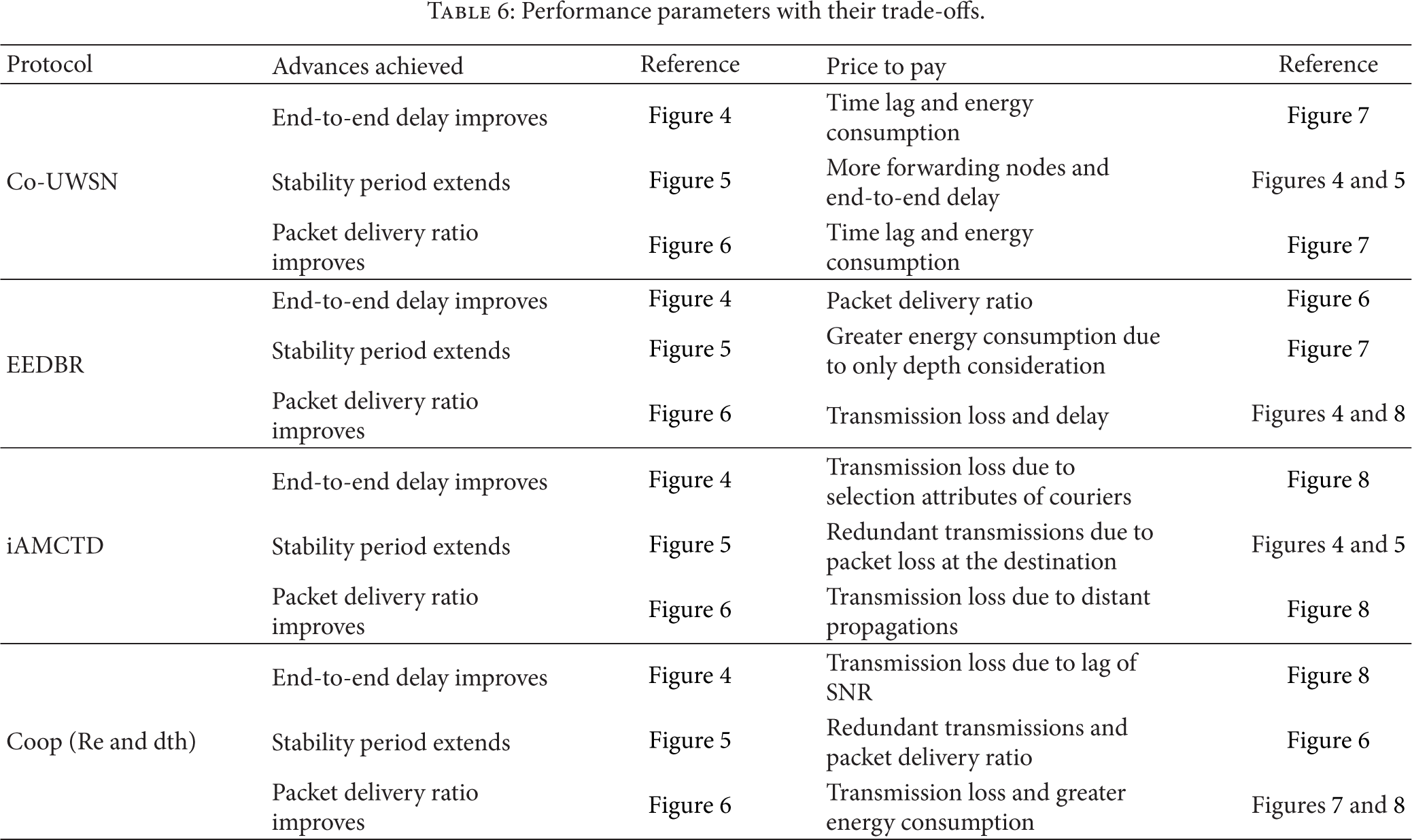
Table 7 indicates a numerical comparison of all the four compared protocols in terms of their efficiency for all the parameters in terms of which their comparison is done.
Efficiency of protocols in percentage in terms of their parameters.

7. Conclusion
In this paper, we have proposed Co-UWSN routing protocol which promises to maximize the network lifetime and reduce the energy consumption of UWSNs. Utilization of cooperation strategy and SNR enhances the network lifetime, improves the PDR, and reduces the overall network energy consumption. This is especially beneficial for delay-sensitive and time-critical applications. Transmission schemes without cooperation are based on channel estimation that improve the received packet quality at receiver node; however, transmission with one path can be affected when the channel quality changes. Relay selection mechanism considers the instantaneous link conditions and distance among neighbouring nodes to successfully relay packets to destination in the constrained UWA environment. Variations in depth threshold increase the number of eligible neighbors, thus minimizing critical data loss in delay-sensitive applications. Characteristics of single-hop and multihop communication schemes have been utilized to reduce path-loss effects and increase network lifetime. Optimal weight computation and role of cooperation not only provide the load balancing in the network, but also give proficient improvement in the network stability period.
Footnotes
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.