
Abstract
An enhanced localization method based on witness nodes (WitEnLoc) is proposed, in which some sensing nodes are selected as witness nodes to confirm the existence of the target at the site given by the initial localization value and improve the accuracy of the existing localization system. WitEnLoc is primarily comprised of three stages: initial value calculation, target node searching, and search result correction. During the initial value calculation stage, the initial value is obtained using the existing localization system, and witness nodes are determined using the IoT (Internet of Things) control platform. In the target node searching stage, inward and/or outward searches are conducted in order to reduce the scope of each target node. During the search result correction stage, the search results are used to correct the initial value in order to obtain a more accurate final value. The simulation results indicate that the proposed WitEnLoc method can significantly improve the accuracy of the existing localization system.
1. Introduction
Accurate target localization plays an increasingly vital role in ensuring personnel safety and optimizing the mining process [1]. Although some surface localization systems have already been developed, most of them cannot be directly used in underground coal mines. The reason is that mining environments are characterized by long and narrow roadways with numerous branches [2], high dust contents [3, 4], equipment, coal walls, and moving targets [5]. Furthermore, working faces keep changing frequently, which makes the communication channel time-varying. Thus dynamic boost characteristics of communications spaces must be considered during target localization [6]. Many localization algorithms assuming that communication spaces remain unchanged yield poor results or even fail entirely [7, 8].
In China, one coal mine will not be allowed for coal production unless the localization system is deployed [9], which makes it a complete waste of prior investments to replace the existing localization system with a completely new system. The aim of this work is to improve the accuracy of the existing system without replacing the existing localization system or addition of extra equipment. Our contributions can be summarized as follows:
One novel localization method called WitEnLoc (enhanced localization method based on witness nodes) is proposed. One noticeable trend in coal mines is that there are more and more sensing nodes for IoT purposes [10, 11], such as disaster sensing and environmental sensing. All these sensors are interconnected and their locations are known as a priori. Under the framework of IoT, not only can nodes with the same type communicate with each other, but also nodes with different types can also exchange information. Inspired by these observations, some sensing nodes are selected as witnesses in this study by the IoT control platform to verify and refine the location of targets. A new design paradigm of the localization system is presented. Despite many localization methods for mine described, none of them considered the collaboration between the existing localization system and other available systems or devices. Distributed cooperative localization is studied in [12], where a prototype system for real-time coal miner localization and tracking is proposed in which only nodes of the same system can cooperate. On the contrary, our WitEnLoc is open-ended not closed-ended, which can cooperate with any other systems or components. Our method improves localization accuracy of existing localization systems without replacing current devices or adding new equipment, which makes it possible to upgrade the localization system smoothly.
The rest of this paper is organized as follows. In Section 2, the concept of the proposed WitEnLoc method is presented. Sections 3 and 4 introduce the two main stages of the WitEnLoc method, respectively: the witness node target searching and search result correction. In Section 5, the performance of the algorithm is evaluated through simulations. The conclusions of this study are presented in Section 6.
2. The Concept of WitEnLoc
2.1. Problem Formulation
From the communication perspective, the existing localization system of coal mine often transmits the underground localization data to ground server through backbone networks, such as industrial Ethernet. The main difference between different localization systems of a coal mine lies in the communication technology between anchors (also called beacons or based stations) and targets (also called unknown nodes), such as WiFi, RFID (Radio Frequency Identification), and ZigBee; see Figure 1 [13]. We developed such a system based on WiFi, which has been used in practical mines.

The structure of existing localization system of a coal mine.
The existing mining localization system usually uses the range-based RSSI (Received Signal Strength Indicator) localization method to identify targets. The log-distance model, expressed as



Assume that

However, radio irregularity [16] makes the RSSI largely random and leads to large localization errors based on (4). Keeping this problem in mind, we explore the characteristics of interconnection between sensing nodes and borrow some sensing nodes as witnesses to mitigate the variance of RSSI and improve the accuracy of localization.
It is worth mentioning that the existing localization system and witness nodes may interfere with each other. For example, channels of localization systems based on WiFi and witness nodes based on ZigBee are overlapped, which result in interference [17]. Interference can change the RSSI and deteriorate the localization accuracy, which has been extensively studied in the wireless networking literature as well as the wireless communication literature [1, 18]. In general, one can use OFDM, diversity combining, site survey, planning tools, or interference estimators to minimize the negative impact. How to characterize wireless channels and design systems with capability of anti-interference is beyond the scope of this paper.
2.2. The Concept of WitEnLoc
Nowadays every coal mine in China must deploy localization system; here we take its localization result as our starting point, no matter how it works. Considering the width of roadways is of little significance during the localization in mines, the localization results obtained using (4) are projected onto the midline of the roadway, and the coordinates of this projection,
The base station transmits initial values to the ground IoT control platform via the communication network, as showed in Figure 2. Then the IoT control platform is capable of identifying these witness nodes since it serves not only as the control platform of the entire mine, but also as the management platform of the IoT devices and knows the locations of all of the sensing nodes. After obtaining an initial value, the IoT control platform queries the database to identify the sensing nodes around that initial value; then witness nodes iteratively search the target nodes and correct the search results to enhance the localization accuracy.
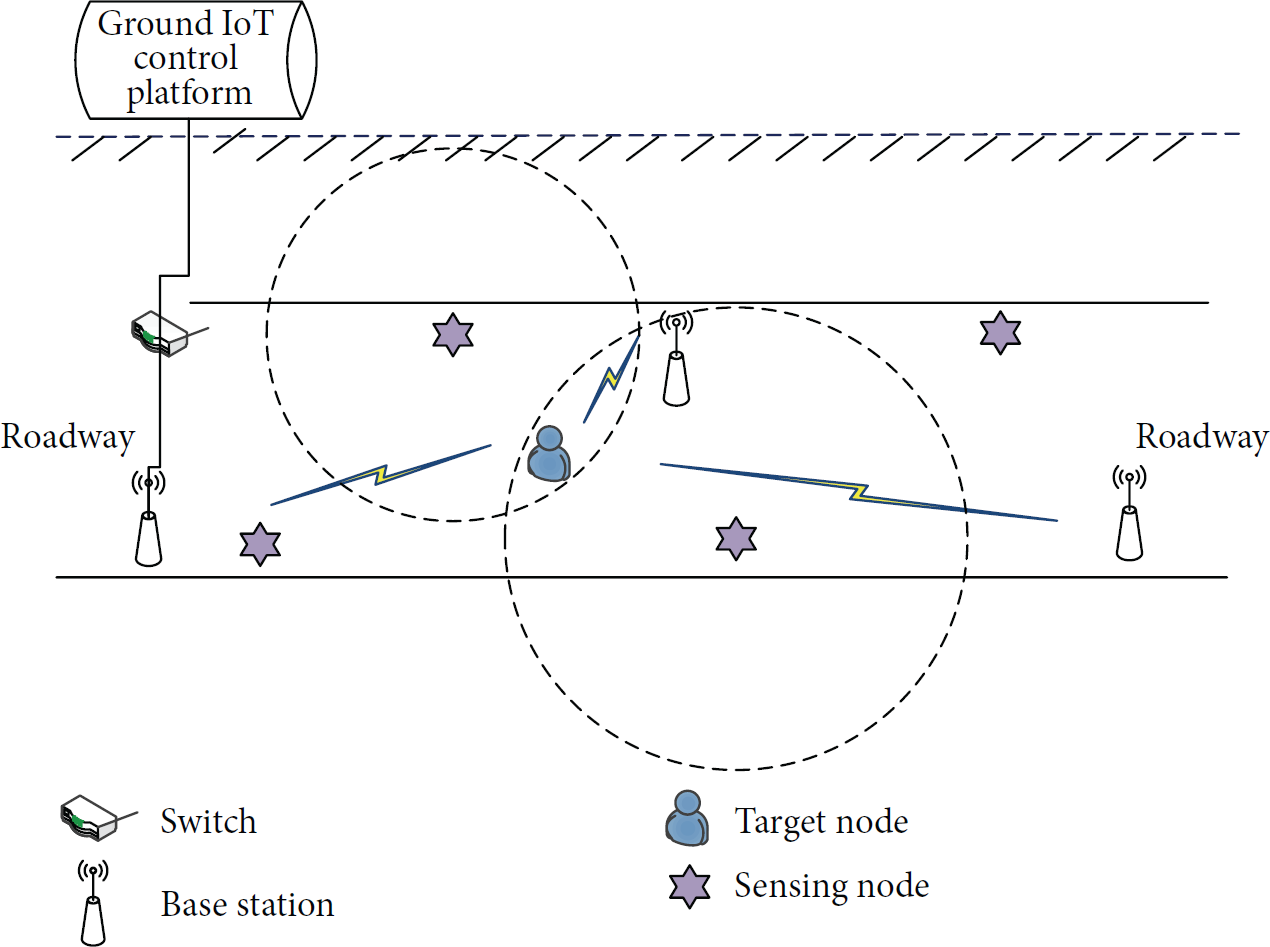
The enhanced localization system based on witness nodes.
Assume that

The target node searching and search result correction are key stages of the WitEnLoc method. The target node searching stage is referred to as target searching driven by witness nodes, since it is launched by witness nodes. To correct search results, at least two witness nodes are required. If the number of witness nodes is equal to 1
3. Target Node Searching
In order to determine whether the target is located at the location identified by
3.1. Inward Searches
Assume that the maximum communication range of a sensing node is
The inward searches lead to two possible results:

The target locates in the ring between two adjacent search circles of the inward search.
Assume that the coordinates of the target node are

When the search radius is smaller than the threshold, the search process is stopped, and the target node is determined to be located in the innermost search circle, as showed in Figure 4.

The target locates in the innermost circle of the inward search.
In this case, the coordinates of the target node satisfy

Noticing that, inward searches refine the localization result iteratively, which may be energy intensive [15, 19]. A more accurate result demands a smaller increment of searching radius, which demands more search rounds and gives rise to more energy consumption of communication and computation [20]. Thus there is a trade-off between energy consumption and localization accuracy. Fortunately, many sensing nodes of coal mines are directly connected to the power source, so this is not a problem. For those battery-powered nodes, we can explore energy collecting techniques to prolong the lifetime of witness nodes, and outward searches can also solve the problem like this.
3.2. Outward Searches
If the witness node fails to locate the target node during the inward searches, then outward searches need to be conducted. To this end, search radius is reset to
The outward searches also lead to two possible results:

The target node locates in the ring between two adjacent search circles of the outward search.
In this case, the coordinates of the target node satisfy the following formula:

When the search radius is greater than

4. The Correction of Search Results
There are two possible areas that can be determined during the target searching stage, as showed in Figures 3 and 5. At the search results correction stage, one of the target areas has to be eliminated. To this end, another witness node is introduced, such that
Once witness nodes are determined, target searches are conducted by each witness independently. Then, the search results are corrected according to the following cases.
(1) Both of the Witness Nodes’ Search Results Satisfy (9). The two witness nodes are unable to determine the location of the target node and, thereby, are unable to enhance the initial value. Thus,
(2) Only One of the Witness Nodes’ Search Results Satisfies (9). According to the spatial position and shape, the roadway of coal mine can be classified into three types, namely, vertical roadway (such as shaft, blind shaft, and draw shaft), inclined drift (such as slope, blind slope, rise, and dip), and horizontal roadway (such as drift, crosscut, in-seam crosscut, and entry). Based on the significance during the process of coal production, the roadway can also be classified into three types, called development roadway, preparation roadway, and gateway, respectively, providing services for the whole mine, one mining district, and one working face. From the localization perspective, however, we can discard these differences in shape or function and divide them into three simple classes, namely, straight, curved, and forky; see Figure 6.

Different types of coal mine roadways.
Let us discuss the scenario of straight roadway first. Without loss of generality, assume that the witness node that can determine the location of the target node is

Identification of the target node by one witness node.
As for the curved roadway or forky roadway, one can easily find from the parts (b) and (c) of Figure 7 that the
One thing that should be mentioned is that the radio propagation in roadway suffers from heavy multipath fading, cross-reads, or reading errors. But considering our aim is to enhance the accuracy of the existing localization system, this problem is not so important. Because the existing localization system experiences the same fading as the WitEnLoc. If we really mind this situation and want to handle it, one feasible option is to collect more RSSI readings at the same place and take their average value to compute the initial value and final value. Alternatively, some optimization methods, such as Kalman filter, can be employed to mitigate the effect of reading errors. The WitEnLoc can combine with any optimization method, but further discussion about their mechanisms is out of scope for this paper.
(3) Neither of the Witness Nodes’ Search Results Satisfies (9). Both of the witness nodes can be used as witness nodes, as showed in Figure 8. The straight line

Identification of the target node by both witness nodes.
Then,

In this equation,
5. Performance Analysis
This section presents experiment results to evaluate our proposed schemes. A method combining actual measurements and simulation results is adopted here. As described earlier, the aim of WitEnLoc is to improve the accuracy of the existing localization system. We have successfully developed a localization system for coal mine and deployed it in a coal mine in Shanxi province, China. This system is based on WiFi technology and its localization results are our start point of following simulation experiments. More specifically, these results collected from actual coal mine will be the initial values of WitEnLoc. It is important to note that two methods are explored in our prototype system, called RSSI-based least square (RSSI_LS) method and TDOA-based Chan (TDOA_Chan) algorithm, respectively, whose localization errors are, respectively, 5.2328 m and 2.0845 m. After these initial results were obtained from actual systems, we can conduct simulations under different conditions.
Because all three roadway types share the same localization stages and operations, here we only simulate the scenario of straight roadway. Unless otherwise stated, the length of the roadway is 100 m; the total number of sensing nodes is
5.1. Enhancement Effects of WitEnLoc on Existing Localization Systems
Figure 9 displays the enhancement effects of the WitEnLoc on existing localization systems. As mentioned earlier, the average localization errors of the RSSI_LS and TDOA_Chan methods are 5.2328 m and 2.0845 m before the correction, respectively; but they, respectively, drop to 1.3633 m and 1.3360 m after the correction, which means the accuracies of the RSSI_LS and TDOA_Chan methods increased by 73.95% and 35.91%, respectively. Thus, the WitEnLoc method can significantly improve the accuracies of the existing methods. The lower the accuracy of the existing localization system is, the more evident these improvements become.

Enhancements effects of WitEnLoc on existing localization systems.
5.2. Influence of the Adjusting Weight
As showed in (10), the adjusting weight, α, controls the adjustment of

Effects of the adjusting weight on the localization performances.
5.3. Influence of the Total Number of Sensing Nodes
The number of sensing nodes around the target node,
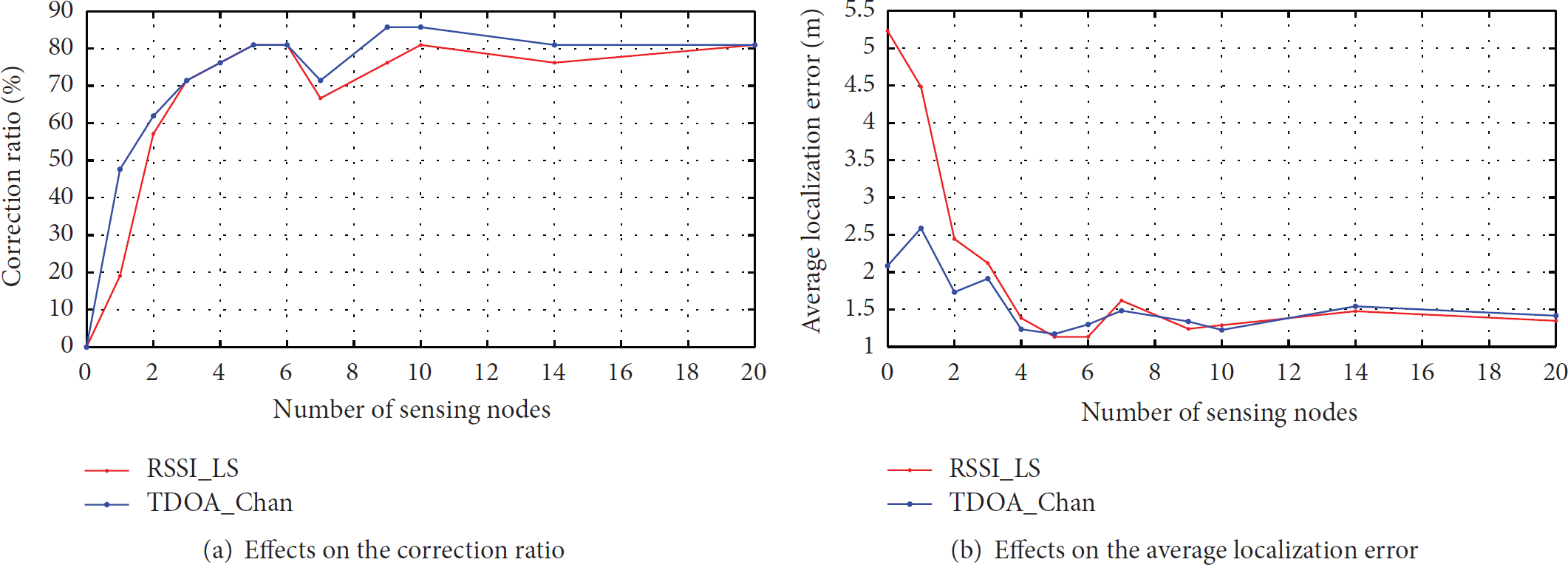
Effects of the total number of sensing nodes on the localization performances.
5.4. Influence of the Increment of the Search Radius
The increment of the search radius,

Effects of the search radius on the localization performances.
6. Conclusions
An enhanced localization method based on witness nodes, WitEnLoc, was developed to improve the localization accuracy of existing localization systems without replacing the current system or adding extra equipment. WitEnLoc can significantly improve the accuracy of existing localization systems regardless of their original localization methods. The adjusting weight, total number of sensing nodes, and increment of the search radius significantly affect the proposed algorithm. As the adjusting weight increases, the localization accuracy also increases. Before the number of nodes required to define two witness nodes is attained, increasing the number of sensing nodes rapidly improves the localization accuracy. Once this requirement is met, the effect of increasing the total number of sensing nodes on the localization accuracy is relatively weak. As the increment of the search radius increases, the localization accuracy and search times decrease. With the explosive progress of IoT in mining, there will be more and more sensing nodes deployed for some special purpose, which ensures the effectiveness of WitEnLoc. In subsequent studies, WitEnLoc will be applied to actual localization systems to validate its practical localization performances.
Footnotes
Conflict of Interests
The authors declare that there are no competing interests associated with the publication of this paper.
Acknowledgments
The presented work was supported in part by the National Natural Science Foundation of China (51204177), the Jiangsu Provincial Natural Science Foundation of China (BK20151148), the National Science and Technology Support Program (2013BAK06B05), and the Fundamental Research Funds for the Central Universities (2015XKMS097, 2014ZDPY14).