
Abstract
Gas source localization (GSL) is a critical component in wireless sensor network (WSN) which can be used to estimate the position of gas leaks through the gas concentration measured by the monitoring nodes. In this paper, we first derive a gas diffusion model under windy conditions based on the gas diffusion theory. Because of the nonlinearity of the gas diffusion model under windy conditions, the traditional weighted centroid algorithm for gas source localization produces very inaccurate estimation of the source location. To address this problem, we propose a novel gas source localization algorithm which combines the weighted centroid method and particle filter. Simulation results validate the effectiveness of our algorithm under unknown gas source strength. Compared to weighted centroid method alone, our algorithm shows a higher accuracy in location. Moreover, its convergence rate is improved by the preestimation of initial value.
1. Introduction
Wireless sensor network (WSN) is usually composed of many tiny low-cost sensor nodes with high adaptability to environments, which integrates sensor technology, information processing, and network communication technology to fulfill the information collection, fusion, and transmission [1]. The detection and localization of gas-leakage sources based on WSN are a typical application in the field of environmental monitoring, which is aimed at finding an effective and accurate positioning method to locate the source of pollution and give timely warning. The research results can be widely applied to searching and positioning of toxic and hazardous gas leak sources, dangerous environmental monitoring, detection and early warning of fire sources, and other occasions [2–5].
Gas source localization (GSL) is an important and challenging task in environmental monitoring. The difficulties of GSL are mainly due to the random nature of physical diffusion process of the harmful gas. The problem of source localization using sensor network was firstly formulated in the seminal work of Nehorai et al. [6]. Since then, wireless sensor networks (WSNs) have found their successful applications in GSL and therefore become an important research area [7–11]. Many researchers have proposed feasible approaches to estimating the parameters of harmful gas leaks and predicting the gas source locations [12].
Over the past decade, extensive studies focused on the location of gas-leakage source using WSN. Nehorai and coworkers [13–15] proposed several methods for detection and localization of biochemical point sources, both static and moving, in the context of concentrated versus distributed and batch versus sequential processing. They modeled the dispersion of the contaminant in a rather simplistic manner using a diffusion mechanism and ignored the turbulence. Michaelides and Christos [16, 17] studied the detection and localization of environmental source leak using Nonlinear Least Squares Estimation (NLSE) method according to the measurement information of sensor node, that is, the gas strength. However, due to the sensitivity of NLSE to parameter initialization, their algorithm might lead to a local minimum of parameter estimation. In 2009, Zoumboulakis and Roussos [18] proposed an algorithm for GSL using sensor networks with constrained resources. They made appropriate usage of Kalman filter combined with geometric computation of the point-source location to circumvent the initialization problem. However, their algorithm suffered from the nonlinearity of the state-space model. Matthes et al. [19] presented a two-step approach for GSL, where the set of points on which the source can be located was estimated for each sensor based on the concentration measurements and the dispersion model, followed by the determination of the intersection of these sets of points. However, the gathering of concentration measurements at sink nodes was in conflict with the scheme of distributed models. Zhang et al. [20] proposed a particle filter (PF) for the location estimation of the odor source. Compared to maximum likelihood estimator, PF has higher accuracy and robustness. Kuang and Shao [21] proposed an improved particle filter (IPF) method to the gas pollution source localization problem, in which the initial point of predicted location was obtained by the weight centroid method, and the precise position was accomplished via the IPF algorithm. However, most existing algorithms have ignored environmental conditions, such as windy condition, which make them difficult to meet practical applications.
In this paper, we propose a novel CSL method in consideration of the nonlinear characteristics of a gas diffusion model under windy conditions. In our approach, we combine the weighted centroid algorithm and particle filters to address two main issues of previous works. On the one hand, the initial values of particle filter are replaced by the source locations estimated by weighted centroid algorithm. On the other hand, the positions and strengths of gas sources are estimated accurately by the particle filter.
The rest of this paper is organized as follows. In Section 2, we describe the diffusion model. In Section 3, we present the proposed estimation method of the gas source location based on the particle filter. The performance of the proposed method is illustrated by the simulation experiments in Section 4. Conclusions are given in Section 5.
2. Gas Diffusion Model
Under the infinite open environment, the gas leak diffuses with some diffusion coefficient. According to Fick's law [22], we have



Without loss of generality, let us assume that the gas leak has the largest concentration level at its initial location, denoted as the source strength Q, and gas leak spreads with a diffusion coefficient in an open environment; (3) can be reformulated as

The solution of (3) and (4) is outlined in the Appendix, and the gas diffusion model in open environment is given by

In practice, it is generally recognized that the gas diffusion reaches a steady state at


Figure 1 depicts the simulated scene of gas diffusion under windy conditions. The environment is assumed to be in a 20 m × 20 m space. The position coordinate of gas leak is at (5 m, 7 m). The initial gas source strength is

Simulation of the gas source diffusion waveform.

Gas concentration of P1~P4 changes with time.
3. Gas Source Localization Algorithm Based on Particle Filter
The gas diffusion process can be described as a random probabilistic process. Therefore, particle filter-based [23] methods are generally considered to be efficient in estimating the parameters of harmful gas leaks.
Assume that there is only one static gas leak randomly distributed at position
In the monitored environment, there are n monitoring nodes distributed at known positions of
3.1. State-Space Model
Before we describe our algorithm, we first need to define the state-space model that involves the gas attenuation model. In general, a state-space model includes two components: the state transition equation and the measurement equation.
Let

3.2. Initialization of the Position
In order to accelerate the convergence rate of particle filter and to prevent the algorithm from being stuck into local optimum, it is crucial to initialize the state appropriately rather than randomly. In an attempt to obtain more accurate a priori information, we propose to estimate the gas source position using the weighted centroid localization algorithm as the initial point of particles: that is,


With the initial position of the gas source and the gas source diffusion model, we may transform (7) into

Now we can easily obtain the initial value of gas strength as follows:

3.3. Construction of the Likelihood Function
As we know, at each time step of particle filter, when an observation of the system is made, we step into the update phase. Here we need to construct a likelihood function in order to update the weights of all particles. Considering that both the measurement noise and process noise follow a Gaussian distribution, we employ the Gaussian likelihood function in our algorithm. Next, we describe the construction of this likelihood function.
In the monitoring process, we assume that the wind velocity is

To reduce the computational load and improve the convergence speed, we may use the prior distribution as the proposal distribution: that is,
From the measurement equation, we have the following probability density function:

3.4. Steps of the Proposed Algorithm
With particle filter, we estimate the parameter vector of gas source using the sequential Monte-Carlo method, which is a kind of optimization method. In order to enhance the filtering performance, we propose to initialize the state with the weight centroid algorithm. Our algorithm is composed of the following steps.
Step 1 (information preprocessing).
When the concentration value of monitoring node in the monitoring area is greater than the threshold value, the node in that region will be active. Then we collect the measurements of each node and preprocess information using gas source weighted centroid algorithm.
Step 2 (iterative positioning at the task manager node).
(a) Initialization: at
(b) Update process: at time t, construct likelihood function according to (16) and update the particle weights as follows:


(c) Resampling: calculate the number of effective particles using the following equation:

(d) Prediction: use the state equation f to predict the unknown parameter
(e) Let
Step 3 (determine the stopping criterion of iteration).
To decide when to stop the iteration of our algorithm, we take the relative difference between our prediction and the ideal measurement value which is calculated by combining the nodes with maximum concentrations
4. Simulations
4.1. Experimental Setup
In our experiments, the monitoring area is assumed to be an open-air storage area of

Diagram showing our experimental setup.
Other parameters of our experiment are summarized in Table 1. Considering that it is a rather short period from gas leak to the completion of the localization process, we consider that the wind speed and direction remain constant in the execution of our algorithm. Here the speed of wind is
Parameters initialization.

4.2. Results and Analysis
4.2.1. Particle Filter versus Weighted Centroid Algorithm
In order to illustrate the performance of the newly proposed GSL algorithm under windy conditions, computer simulations are conducted based on parameters defined in Table 1. Figure 4 shows the performance of our algorithm against the actual values, where the predicted gas source location versus actual location is shown in Figure 4(a) and the predicted gas source strength versus actual strength is shown in Figure 4(b). From Figure 4, we can see that our estimations are far from the actual values at the beginning of the iterations, which is due to the lack of information in the initialization. As our algorithm iterates, the estimation becomes closer and closer to the actual values, which is further demonstrated by the convergence at around 15 iterations.

Comparison of our algorithm and actual values.
Furthermore, to validate the robustness of the proposed algorithm, we compare our algorithm against the weighted centroid algorithm in scenarios of wind speed being less than
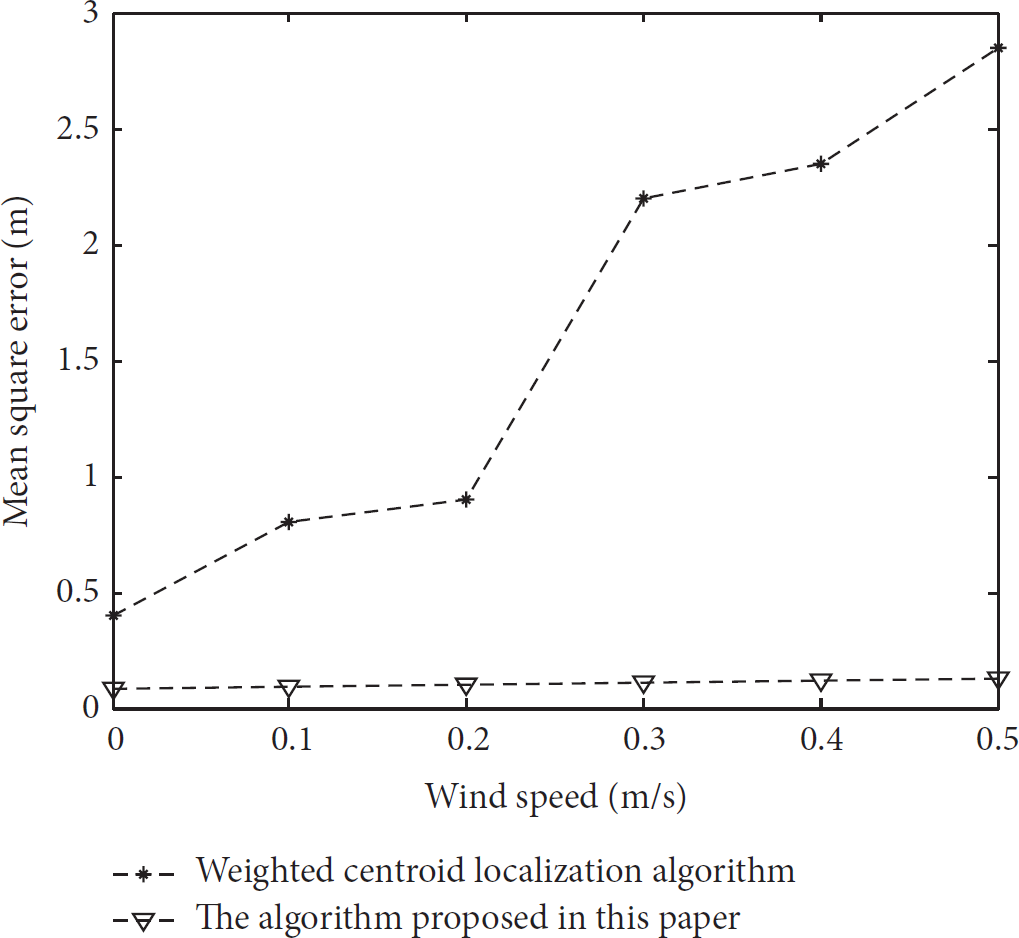
Mean square errors of our algorithm and weighted centroid algorithm under windy conditions.
4.2.2. Impact of Initialization
As it is mentioned earlier in this paper, initialization plays a pivotal role in most of the existing algorithms. To study the impact of initialization on our algorithm, we run our algorithm with different initial values, the results of which are plotted in Figure 6. Here, the initial value 1 represents the position of monitoring node whose concentration is the largest. The initial value 2 represents the position estimated by weighted centroid algorithm. Comparison of two curves in Figure 6 reveals that the initial position has effect on the speed of iteration. However, the position accuracy does not seem to suffer from initialization once the algorithm converges. As such, it is easy to conclude that, by carefully estimating the initial value, our algorithm has achieved an improved speed of convergence.

Impact of initial values on positioning errors.
4.2.3. Impact of Diffusion Coefficient and Environmental Noise
Diffusion coefficient and environmental noise are two important factors of GSL. They have impacts on both the positioning accuracy and the convergence speed of the localization algorithms. We have also conducted thorough experiments to analyze these two factors on our algorithm, the results of which are depicted in Figures 7 and 8. In Figure 7, we choose two different gas diffusion coefficients and plot the MSEs of our algorithm. Here, we can see that the impact of the gas diffusion coefficient is significant at the initial stage of the iteration. The larger the gas diffusion coefficient is, the slower the convergence speed and the greater the error will be. While the impact of gas diffusion coefficient on this algorithm is relatively small when the algorithm converges, they have almost the same MSE of position. Similarly, in Figure 8, we choose two different environmental noises and plot the MSEs of our algorithm. Again, we can observe that the impact of environmental noise on the proposed algorithm is significant at the initial stage of the iteration. The larger the gas environmental noise is, the larger the MSE will be. However, the speed of convergence seems less sensitive to the environmental noise.
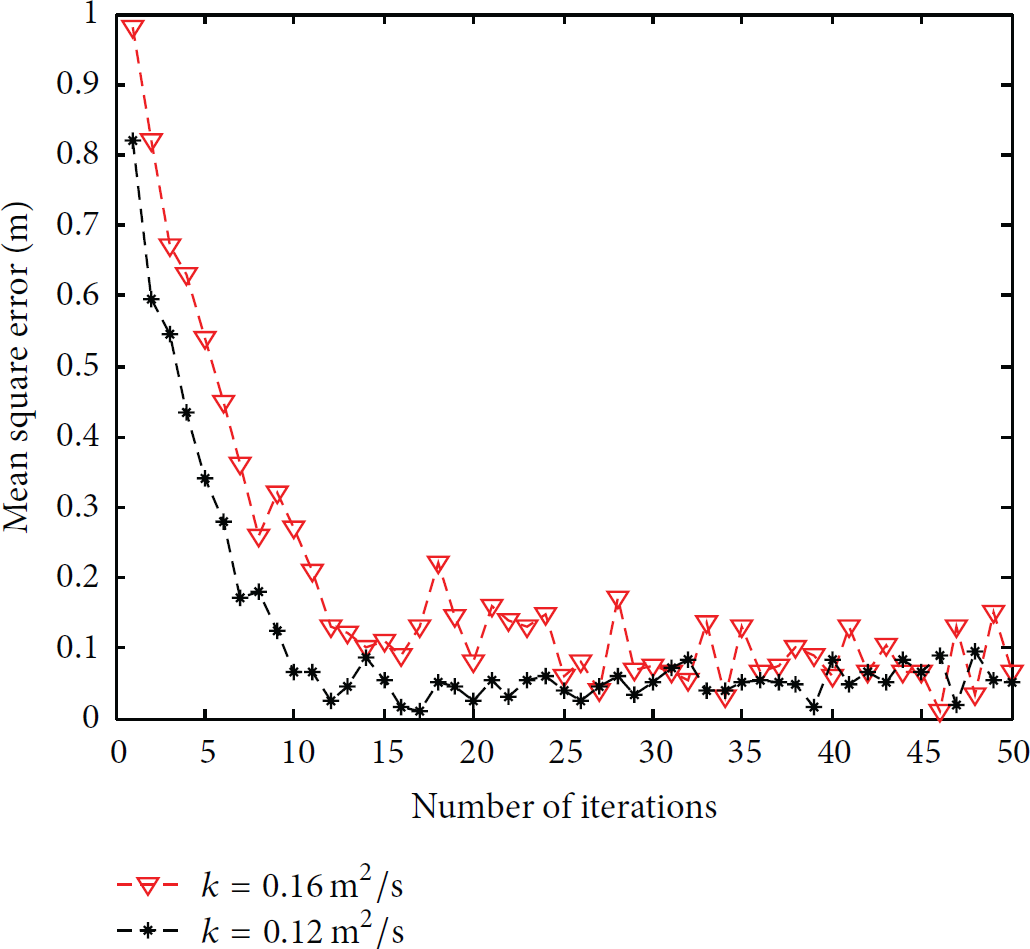
Impact of diffusion coefficient on our algorithm.

Impact of environmental noise on our algorithm.
5. Concluding Remarks
In this paper, we investigated the gas source localization problem under the windy conditions. First, we derived a gas diffusion model based on the gas diffusion theory. Then, we proposed a novel gas source localization method to address the nonlinearity of the gas diffusion model under unknown gas source strength and wind. In particular, we used particle filter as the main framework and efficiently introduced the weighted centroid algorithm to the initialization stage. Computer simulations have shown that (1) the position and strength of gas source can be accurately estimated by the proposed algorithm; meanwhile, it has a higher positioning precision compared with the weighted centroid localization under windy conditions; (2) the initial position estimation of gas source using weighted centroid algorithm can improve the convergence speed of particle filter; (3) although, for larger gas diffusion coefficient, the convergence speed is slower and positioning error is greater, its impact on our algorithm is relatively small when ours converges; (4) although, for larger gas environmental noise, the positioning error is significant, its impact on the convergence speed of our algorithm is relatively small.
Footnotes
Appendix
The Cartesian form of (3) is
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Acknowledgments
This work is supported by program for New Century Excellent Talents in University no. NCET-12-0103, by the National Nature Science Foundation of China under Grant no. 61473066, by the Fundamental Research Funds for the Central Universities under Grant no. N130423005, by the Natural Science Foundation of Hebei Province under Grant no. F2012501044, by the Science and Technology Research Project of Higher Education of Hebei Province under Grant QN20132010, and by the Support Foundation of NEUQ under Grant XNK201404.