
Abstract
We propose a low-cost device-free mobile target tracking system using passive tags, namely, DTrack, to detect and track a human object in a certain surveillance area. The idea is that when a human object moves, he may block or reflect the RF signals between the reader and tags. Based on the estimation of Doppler Shift and Tag Read Rate variations, DTrack can detect whether a human object enters in the system and further track the moving direction of the object. DTrack uses commercial readers and off-the-shelf passive tags and is scalable and easy for large-scale deployments. Experimental results show that our system is effective in detecting the direction of moving human objects with high accuracy.
1. Introduction
Detecting moving objects and their trajectories is important for many applications, such as quantifying the number of tourists in a museum, assisting the access control system for a company, and the like. Existing approaches have applied vision, infrared ray, or mechanical barrier based technologies to meet this need. The vision based technology depends highly on the lighting condition and usually needs expensive equipment. Infrared ray and mechanical barrier are often applied in the entrance of a building, limited by the requirement that there is only one person passing through the entrance at a time. Each of them has limitations that stop it from achieving universality.
With the emergence and continuous development of the Internet of Things (IoT), Radio Frequency IDentification (RFID) has become one of the most important technologies in IoT applications. In recent years, the study of Wireless RF technology mainly focuses on the recognition efficiency [1], quantity estimation [2], authentication security [3], localization [4], and so forth. Due to its low-cost and easy-deployment features, RFID has been applied in human detection and tracking recently. There are two major categories in the literature: device-based and device-free methods. With tags attached to various items, many applications benefit from the high localization and tracking accuracy of passive RFID systems, like the warehouse, the library, the supermarket, and so on. However, most existing device-free object detection or tracking solutions are based on active tags [5, 6]. Active tags are cost-inefficient and battery-powered, which are not suitable in most practical deployments. Therefore, we adopt widely deployed yet cheap passive tags for device-free tracking in real large-scale implementations.
In this paper, we present a device-free object detection and tracking solution, named DTrack, based on passive RFID tags. DTrack is device-free, that is, without the need of attaching anything to the target. DTrack utilizes the blocking and reflecting effect of human objects to RF communication links. By deploying a tag array in the surveillance area, DTrack analyzes the variation of signals backscattered by passive tags and determines whether a human object enters in the area. Furthermore, DTrack is able to infer the target's moving direction. DTrack merely employs commercial RFID readers, directional antennas, and off-the-shelf passive tags. The system is fully compatible with the existing RFID standard, that is, the commercial EPCglobal Class 1 Generation 2 protocol [7]. The backscattered signals by tags comprise a number of parameters, including RSS, Phase, and Doppler, which are the basis of direction estimation.
The contribution of our work can be summarized as follows:
We theoretically analyze the existence of Doppler in device-free RFID systems and propose a Doppler-based detection method to determine whether a human object enters in the surveillance area with low false positive rates. We propose an efficient tag filtering algorithm accompanied with a NTRR-based method to track the human walking direction. We conduct extensive experiments on a prototype DTrack system using passive tags. The experimental results show that our solution can achieve high accuracy on both the detection and tracking problems.
The rest of the paper proceeds as follows. In Section 2, we introduce the low level data in RFID systems. In Section 3, we theoretically analyze the causes and principles of Doppler in the device-free system. We further discuss the reason for the low SNR of Doppler derived from commercial reader API and propose our improved Doppler estimation method. In Section 4, we propose the NTRR-based method to track human walking direction. In Section 5, we take an overview of DTrack and present the design details. In Section 6, we describe our implementation and evaluation results. In Section 7, we discuss related works. We conclude the paper in Section 8.
2. Background
In this section, we introduce the background of UHF passive RFID systems.
2.1. Backscatter Communication
Typical passive RFID system is composed of three parts: a RFID reader with multiple antennas, several passive tags, and a backend. Passive tags are usually not equipped with a battery or radio transmitter. Instead, they harvest power from the RF wave emitted from the reader. During the power harvesting, Carrier Wave (CW) transmitted by the reader induces a voltage on the tag antenna, and hence a current can be induced due to the connected tag load. As a simple practical construction of this communication link, we can use a transistor as the tag antenna load. As Figure 1 illustrates, when the transistor is turned on, a short circuit travels through the channel. Otherwise, the channel becomes nonconductive, backscattering a modulated wave to the reader. According to the backscattered signal, the reader can acquire the information about the tag, including the ID, RSS, Phase, and Doppler Shift.
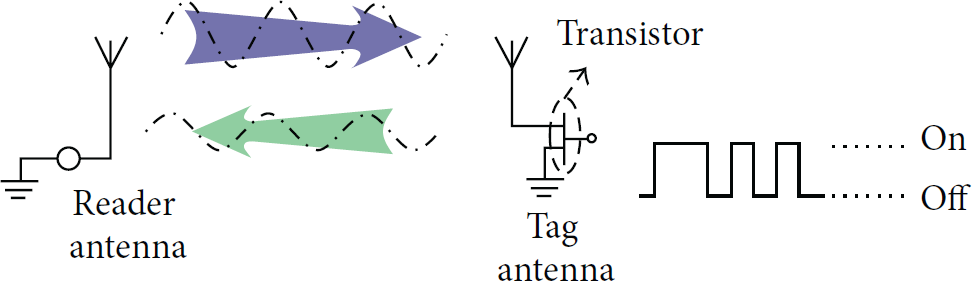
Modulated backscatter using a transistor as a switch.
2.2. Signal Characteristics
As mentioned before, with the backscattered information about tags, a typical COTS reader, for example, Impinj R420 in our implementation, can report some low-level signal characteristics. Among them, we mainly use the Received Signal Strength (RSS), RF Phase, Doppler Frequency Shift (Doppler), and Tag Read Rate (TRR).
2.2.1. RSS
RSS is a power measurement in unit of dBm. It decays as
2.2.2. RF Phase
The RF Phase is a periodic function of frequency (f) and distance (R) with period 2π. It can be calculated by

2.2.3. Doppler Frequency Shift
Doppler Frequency Shift is the shift in the frequency of the backscattered tag signal due to the relative movement between the reader and the tag. In passive RFID systems, if


2.2.4. Tag Read Rate
Tag Read Rate is the total number of successful readings of a tag within a specific time period T. For a given tag i, we define its Tag Read Rate (TRR) as follows:

3. Doppler-Based Human Object Detection
In this section, we first present the observations of the effect from human movements on tag signals. Then, we elaborate the theory analysis of Doppler phenomenon in device-free RFID systems. Finally, we discuss the Doppler estimation method and human object detection schema in DTrack.
3.1. Opportunity and Challenge: Human Impact on Tag Signals
To detect a human object and figure out his moving direction, the first idea that comes to our mind is to consider the impact of human movements on tag signals.
3.1.1. Device-Based Scenario
When a human object carrying a tagged badge moves towards or away from the reader antenna, the changed relative distance and velocity may induce a shift on both RSS and Doppler values. To evaluate this impact, we invite a volunteer to walk towards the reader antenna first (“move-forward” case), stand still, and then walk back (“move-backward” case). The results are shown in Figure 2. As illustrated in Figure 2(a), the RSS and Doppler remain nearly stable at first. Then when the human (i.e., the tag) moves to the reader antenna, RSS increases from the 180th to 220th sample. Starting from the time of about the 221st sample, the volunteer stays still, and the RSS remains stable again. Meanwhile, in the same period (say the 180th to 220th sample), we observe increasing positive Doppler values (corresponding to human acceleration from static state) and then decreasing positive Doppler values (corresponding to human deceleration). This can be explained by the reason that, with the tag moving towards the reader, the distance that the signal travels decreases, which weakens the strength reduction caused by the path attenuation. Therefore, with the same reader transmit power, RSS of tag backscatter signal increases. On the other hand, the positive direction of velocity leads to a positive Doppler Shift. For similar reasons, the “move-backward” case in Figure 2(b) shows the opposite results to Figure 2(a).

The impact of human movements on RSS and Doppler in device-based scenario.
As a summary, the changes of RSS and Doppler in device-based scenario are obvious, highlighting the impact of human movements on RFID communication links and tag signals. It inspires us to utilize tag signals to detect human movements in device-free and semiopen scenarios.
3.1.2. Device-Free Scenario
We verify the feasibility of the above solution via extensive experiments. However, the signal variations appear totally different when applying to the device-free scenario. During the experiments, a volunteer is walking around at different distances away from the tag. We collect the RSS and Doppler signals and plot their changes in Figure 3. From Figure 3, we derive two insights:
In device-free scenario, RSS is sensitive to human activities. When the distance between the human and the tag varies from 0.5 m to 3.5 m, RSS fluctuates significantly, but the varied ranges have little difference. It implies that RSS is not suitable for human detection in our system, because a faraway wandering person may be wrongly regarded as a target human object, which will induce false positives in DTrack. Doppler is insensitive. When the distance varies, Doppler values have no obvious changes. Even the volunteer walks close to the tag (say 0.5 m); no significant concave or convex peaks appear.
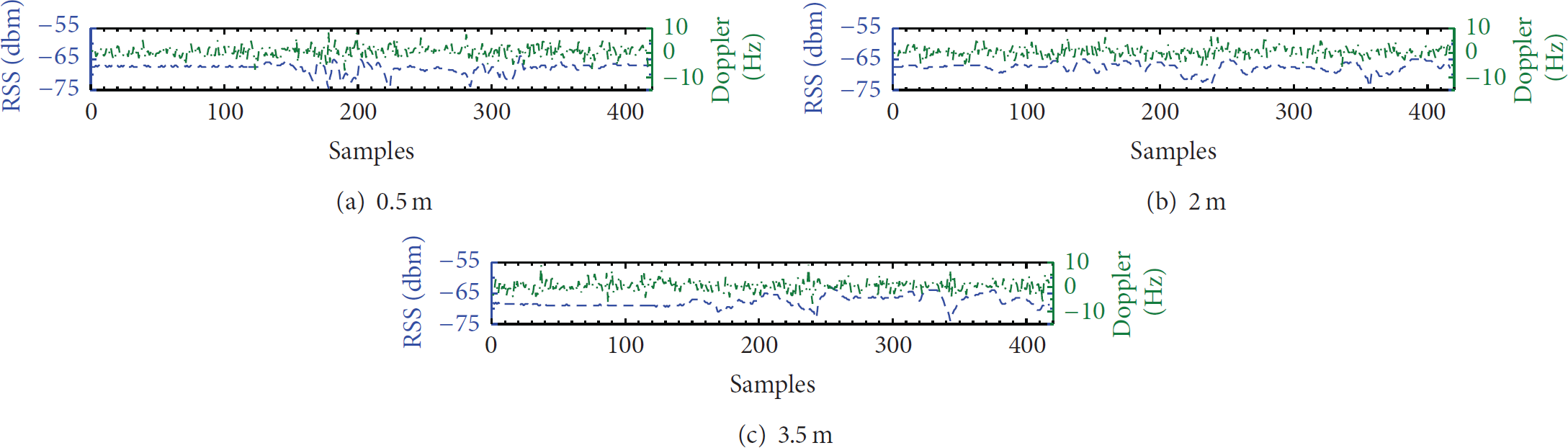
The impact of human movements on RSS and Doppler in device-free scenario under different distances.
The results are not encouraging, which makes us rethink the signal characteristics in the device-free scenario.
3.2. Theory Analysis: Doppler in Device-Free RFID System
In this section, we analyze the Doppler effect in device-free systems theoretically. In device-free RFID systems, although the reader and tags are both static, it is unreasonable to assume that human movements can influence the measurement of Doppler.
In real environments, the wave emitted from the reader antenna is likely to interact with many other objects, resulting in multipath effects. Consider when there is no interference incurred by a person. In this case, the RF signal between the reader and the tag is the addition of a direct beam and some constant reflections (perhaps from the floor and a distant wall). Then, we can write the resulting signal as

When a human object moves around, some newly compositive reflections by his movements may be induced. Based on the additivity of wireless channel, the new RF signal can be represented as
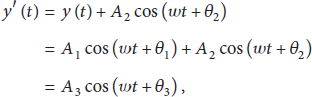
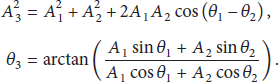
According to (6), we know that when the human being moves, the phase of the signal will change. As mentioned in Section 2.2, Doppler calculation in RFID systems is based on the phase value. Hence, we can conclude that Doppler frequency shift exists in device-free RFID systems.
3.3. Doppler Estimation
In this section, we first analyze the reason why the Doppler derived from reader API is undistinguishable once applied in device-free scenarios. Then we propose an improved algorithm for accurate Doppler estimation.
We conduct a series of experiments to collect a period of Doppler values of some static tags and test their distributions. To avoid the influence of other factors, we adopt a constant configuration involved in the communication, for instance, a fixed frequency (say 6th channel, 921.88 MHz) and the like. One of the results is shown in Figure 4(a). It shows that Doppler values derived from the reader's API contain random errors, following a normal distribution with the mean of 1.29 Hz, the standard deviation of 0.96 Hz, and the maximum value of 4.69 Hz. The results suggest that the noise in Doppler estimation from the reader's API is always presented. Then we try to analyze the underlying reasons.
Doppler and phase from API.
(i) In our system, if the Impinj R420 reader is configured for LLRP GEN 2 mode “2” operation (i.e., Miller-4 coding,

Thus, Doppler estimation has high requirement on time accuracy.
(ii) We further test the distribution of phase measurement against the Gaussian distribution. With the observation from Figure 4(b), we find that the phase follows a standard Gaussian distribution with a deviation of 0.2 radians, probably due to the thermal noise from the reader's receiver module.
Therefore, both the time accuracy and the thermal noise of phases could lead to Doppler measurement errors, which agrees with (3) mentioned in Section 2.2.
Our Solution. With the above weakness of Doppler estimation algorithm in mind, we propose an improved method. First, we fix the channel with the maximum available frequency (i.e., 16th channel, 924.38 MHz) and increase the EPC packet length (i.e., increase packet duration) by adopting the M-8 reader inventory mode. Second, instead of estimating the phase difference between the first and the last wave of a single EPC packet, we prefer adopting the phase and time difference derived from two consecutive EPC packets. To achieve this goal, we need to unwrap the periodic phase in the first place [8].
We validate the efficiency of our method and plot the results in Figure 5. The green line is Doppler from API, which is the same as Figure 3. The red line illustrates the corresponding Doppler of our method. The results show that our method has better SNR. In addition, when the distance between the human and the tag is close enough (say 0.5 m), Doppler varies obviously (around the 180th sample and the 300th sample).

Doppler API versus Doppler in device-free scenario under different distances.
As a summary, Doppler exists in device-free RFID systems, and it is sensitive when the human moves close enough to the tag. However, its positive or negative values have no explicit meaning for directions. It inspires us that Doppler can be used as a detector in our system to decide whether a human object is walking across our surveillance area.
4. NTRR-Based Human Object Real-Time Tracking
After detecting that a human object has walked into the surveillance area, the second target of DTrack is to track his moving direction, that is, to track the order of tags he passes.
Whether a tag could be well inventoried by the reader depends on two factors. Downlink requirement: the reader transmits enough power to reach the tag antenna's minimum activation energy. Uplink requirement: tag backscattered signal strength is high enough to enable the reader's receiver to correctly demodulate and decode this signal. As mentioned before in the previous section, human movement does have impact on the communication link in RFID systems. Specifically, when a human object just blocks the line of sight from the reader antenna to the tag, the backscattered tag signal may be terribly absorbed or reflected by the human body. Thus, both the uplink and the downlink powers would be weaken, leading the tag to being unreadable. The above analysis indicates that Doppler variation tendency cannot be utilized to track the tag order. The reason lies in the following:
According to the rationale of Doppler, it can just characterize the direction along the path across a moving reader or a moving tag. In DTrack, both the reader and tags are static. Moreover, the influence of a freely moving human on Doppler is indeterminate. Human may block the line of sight of the communication link, resulting in unstable reads of the tag. In this case, contiguous phase values may have huge jitters due to undersampling, which leads to those Doppler changes indeterminately.
Our Solution. With the inevitable human block influence in mind, we consider if we can utilize it. Thus, we propose adopting Tag Read Rate (TRR) to determine the tag order. As a simple example illustrated in Figure 6, three tags divide the whole region between reader antenna and tags into four parts. When a volunteer walks from region #2 to region #3, we infer that Tag 2's TRR will go through a decreasing phase (caused by the blocking) in the middle for a certain period of time. Commonly, as the person moves from region #1 to region #4, he blocks the line of sight of Tag 1 to Tag 3 one by one. For this reason, we can refer to the temporal relationships of TRR variations to determine the tag order, further to infer the human moving direction. For universality, we normalize every tag's TRR, named after NTRR. For a given tag i, its normalized TRR (NTRR) is
Human block model.
We randomly select 3 Impinj E41C tags and deploy them as Figure 6 to verify the effectiveness of this method. The reader antenna is mounted on the ceiling. A volunteer walks across Tag 1 to Tag 3 sequentially. We set

NTRR trends of three tags during the human movement.
5. DTrack
DTrack is a fine-grained device-free UHF RFID tracking system, which provides a solution on detecting a target within a surveillance area and tracking his moving direction. In DTrack, we propose adopting Doppler to detect whether a target is walking into the surveillance area. Then NTRR is used to acquire the tag order and further infer the human moving direction. Besides the elaboration on the design of DTrack, we also consider different factors having influence on practical deployments.
5.1. System Overview
DTrack leverages the ultralow cost of UHF passive tags to deploy an array on the floor in the semiopen environment. DTrack's architecture includes a background database which stores the IDs and relative locations of tags in the array.
To track a human object, DTrack takes the following steps:
DTrack queries every tag in the array. DTrack calculates Doppler of tags on the edge of the array based on their phase values, using the technique in Section 3.3. By detecting the peak value of Doppler, DTrack identifies whether a human object enters the surveillance area. Finally, based on NTRR algorithm, DTrack tracks the order of the influenced tags and further infers the human walking direction.
In the next few subsections, we will elaborate on the above steps, providing the technical details.
5.2. Identifying Doppler Variation
Before detecting the Doppler variation, we first consider how different deployment conditions impact on it.
5.2.1. Tag Diversity
Due to the manufacturing process, even those tags in the same model will have differences in their antennas or chip circuits, resulting in signal distinctions [3]. Thus, we test Doppler variations of 10 Impinj E41C tags under coincident experimental conditions. We put each tag at the same place and calculate its Doppler values when a volunteer walks across it. Every bar in Figure 8 represents the mean value of 30 experiments, and the top and bottom points of the black line mark the maximal and minimal results. We see that most tags' Doppler flutters in a small scope. Only the value of Tag #5 is far away from others. Insights: various tags behave differently; we suggest abandoning the highly anomalous tag, like Tag #5, to lessen the impact of tag diversity.

Doppler value versus different tags.
5.2.2. Angle Diversity
In real scenarios, as we deploy a tag array, different tags in the array may have different angles (β) towards the reader antenna. Hence, in this part we conduct a set of experiments to examine the impact of different angles on Doppler. Because the radiation angle of our directional antenna is symmetrically approximately 70°, we choose 5 typical angles (say 0°, 10°, 20°, 30°, and 40°) to show the results. From the mean Doppler shown in Figure 9, we conclude that, with the increasing β, Doppler decreases slightly. In particular, Doppler value is minimum when

Doppler value under different angles.
5.2.3. Velocity Diversity
In practice, the common human walking velocity varies from 0.5 m/s to 1.5 m/s. Hence we need to consider the impact of the human velocity on Doppler. Figure 10 shows the results. Notice that the relationship between the velocity and Doppler is not linear. There is a slight difference of Doppler under different velocities. The reason behind that is that in our system human acts as an obstacle, absorbing or reflecting some of the energy. Moreover, Doppler depends on the phase value, which has little relation to the velocity. Insights: Doppler of our method is tolerable to common practical velocities.

Doppler value versus different moving velocities when β = 20°.
In addition, the red dotted lines in Figures 8, 9, and 10 represent the Doppler value when there is no person walking around. Thus, although the above three factors have impact on Doppler estimation, the variation is still distinguishable. Based on the above analyses, DTrack needs a dynamic threshold method to detect the Doppler peaks. We set proper “MINPEAKHEIGHT” for tags according to their different β towards to the reader antenna. Meanwhile, we take the minimum separation between peaks into account and use “MINPEAKDISTANCE” to ignore peaks that occur in the neighborhood of an estimated peak.
5.3. Tracking an Human Object
Once DTrack detected a human object in the surveillance area, the next step is to track his moving direction. We deploy a tag array in our implementation (refer to Section 6.1) and propose to adopt NTRR-based method to fulfill this target. However, there is a challenge in the practical system: that is, when a human object moves, which tags' NTRR should we check?
To deal with this problem, we propose a simple but effective tag filtering solution. The idea behind our algorithm is based on the following observation. When a human being moves in the surveillance area, his body will generate a shadow. The line-of-sight path of tags under this shadow will be blocked to some extent, presenting Doppler changes. But the maximum Doppler is always generated by the tag which is nearest to the human body and the reader antenna. It inspires us to utilize this phenomenon to determine the target tags we need.
Note that DTrack stores a tuple

An example of the tag filtering algorithm.
5.4. Dealing with Multiple Human Objects Real-Time Tracking
We further discuss whether our method can be extended to the scenario with multiple human objects. As mentioned before, tags' Doppler will change when they are within a walking human's shadow. Utilizing this, we first estimate how many and which tags (represented by scope A) are within the shadow of the human object. Ideally, to determine if tag i is in A, we can test the following inequality:

6. Implementation and Evaluation
In this section, we present the implementation of DTrack and evaluate its performance via extensive experiments.
6.1. Implementation
6.1.1. Hardware
We implement DTrack using Impinj Revolution Reader 420 without any hardware modification. The reader supports at most four antennas, providing a low-cost opportunity to create a large, contiguous RFID read zone. In DTrack, we adopt one-directional antenna (i.e., Laird PAL90209H) with the main lobe angle of around 70 degrees. The type of the passive tag we employed is Impinj E41C (with the size of 8 mm × 95 mm). Due to the strong influence of the ground to electromagnetic signals, tags are adhered on the foam. The design of the antenna structure and material makes E41C function well on the foam, with a communication distance far to 13 m. The whole system operates on the frequency of 924.375 MHz, which is compatible with commercial EPCglobal Class 1 Generation 2 standard [7].
6.1.2. Software
We adopt LLRP protocol [9] to support the communication between the Impinj reader and tags. The protocol provides the API for some low level data for users, such as RSS, Phase, Doppler, and the like. Our software is implemented using C#, and it can report tag-related signals once the reader identifies a tag. We run the software on a Thinkpad PC which is connected with the reader through a cable.
6.1.3. Deployment
As shown in Figure 12, the reader antenna is mounted on the ceiling with its surface parallel to the ground, for the sake of the power and the coverage being symmetrical. The ceiling is 2.5 m high. And we deploy a 3-line, 11-column tag array in our lab to simulate the semiopen environment. The center of the array faces the middle of the reader antenna. The distance between tags in the column is 30 cm on the basis of considering human's average body width. On the other hand, we set the distance between lines to 60 cm, so that most humans may walk across one tag per step.

Experiment setups of DTrack.
6.2. Performance of Doppler-Based Detection
First we discuss the performance of our dynamic threshold based Doppler detection method.
6.2.1. The Impact of the Angle β
In this experiment, we invite a volunteer to walk across different columns of the tag array at a constant speed he prefers. As a comparison, he also wanders around the tag array 1 m~3 m far away. We test the accuracy for determining whether he walks into the surveillance area. The aggregated results over total 210 experiments are shown in Figure 13. Note that, limited by the height of the ceiling, the reader antenna is 2.5 m high from the ground with the radiation angle of 70°. Hence, the available read zone is 1.5 m away from the middle of the tag array. We convert the column distance of tags in the array to the corresponding angle β in this figure. From the results we see that the accuracy slightly decreases when β grows. Overall, DTrack shows a high accuracy on the access detection and distinguishes most of the positive cases (i.e., 95.6%). Also, no wardering case is falsely determined as a positive case (note that the label “Comp.” represents the wandering case), which means the false positive rate is 0.

Detection accuracy versus β.
6.2.2. The Impact of the Velocity
We also check the influence of velocity on the detection accuracy. A volunteer walks at different velocities from 0.5 m/s to 1.5 m/s both across our tag array and wandering 1 m away. The results are plotted in Figure 14. The accuracy decreases when the walking velocity increases. The reason behind this is considered as follows: Doppler estimation of our system is based on the phase difference of continuous tag signals. In this case, if the volunteer moves so fast that the reader may miss some reads, he will pose uncertain influences to the system. The reason for the changes of false positive rate is similar.

Detection accuracy versus different velocities. The blue line represents the detection accuracy when a volunteer walks into the surveillance area. The red line represents the false positive rate when we take a wandering volunteer as a legal one by mistake.
In a short summary, adopting the Doppler-based method and dynamic threshold peak detection algorithm enables DTrack to achieve high accuracy for human access detection in a real-world deployment of commercial device-free RFID systems.
6.3. Evaluation of NTRR-Based Tracking
Next we investigate the accuracy of NTRR-based tracking scheme. We invite 10 volunteers to walk across the tag array in our prototype. Their height varies from 160 cm to 180 cm. Their average walking speed is about 1 m/s. The experiments are divided into three groups: walk forwards, walk backwards, and walk sideways across the tag array. They can select a random entry (a random tag) to enter the surveillance area and repeat each experiment 10 times. The results are reported in Figure 15. We find that the system has a lower accuracy on the taller persons. The reason is that the taller person has a larger shadow area such that when he walks, more tags will be infected, yielding a high variability to the system. On the other hand, the “walk forwards” and “walk backwards” groups almost have the same accuracy. This is reasonable, for the radiation region of the reader antenna is symmetric. Hence, the situations of these two groups are the same to our system. Although the accuracy of “walk sideways” group is lower for all human heights, it is still above 87%. And the overall accuracy of the system is 91%.
Accuracy of tracking for different groups of experiments.
7. Related Work
Wireless signals, such as WiFi, 3G/4G, and Radio Frequency waves, are susceptible to environment variations or object movements [10–13]. Leveraging this effect, it is promising to achieve accurate and efficient indoor sensing by observing the disturbance from targets to those wireless signals. In the literature of motion detection and tracking, prior works can be categorized into two categories: device-based and device-free approaches.
7.1. Device-Based Approach
If the object carries a localizable or detectable device, its location or movements can be detected by identifying this device. Compared to other wireless devices, RFID tags are more suitable for serving as attachable devices due to its advantages in the cost and deployment. Hence, leveraging commercial RFID devices for localization extracts increasing attentions. To accurately localize an RFID tag, some researchers utilize the phase information [4]. Those works usually require multiple antennas and a Line-of-Sight (LOS) operation pattern [10]. PinIt [14] presents a NLOS solution, exploiting the multipath effect to accurately locate passive RFID tags. It calculates the similarity of multipath profiles between the target tags and reference tags and achieves a 25 cm localization accuracy. The Angle of Arrival (AOA) technique is also widely used for passive tag localization. With the assistance from recent advances in the utilization of antenna arrays and Doppler Shifts, AOA based approaches can provide accurate localization accuracy [11, 15]. Other works utilize fingerprint based methods to correlate the location information to some features of wireless signals at certain positions [5]. To solve the predeployment problem, some approaches rotate the wireless device [16], that is, a mobile device, or model the physics of wireless propagation via RSSI [17, 18].
7.2. Device-Free Approach
Releasing the object from the constraint of attaching a device, device-free approaches show their superstition in motion detection and tracking for uncooperative targets. Many efforts have been done in recent years. WI-VI [19] detects moving humans and identifies their gestures through walls using the MIMO interference nulling technology. Spartacus [20] is a neighboring device interaction system for solving the problem of detecting a pointing gesture through audio sensing. It merely makes use of the sensors in commercial smartphones and shows good compatibility. RSS is another important feature to reflect the ambient RF changes, and it can be adopted in both the active and passive tags [5, 6, 21]. However, this technique may be unreliable in multipath environments [14]. Instead, Twins [22] leverages the mutual interference between approximated passive tags to enable the motion detection. It discovers an interesting phenomenon: two tags close to each other can enter into a critical state in which one tag is not readable due to the mutual interference. Any nearby moving objects will inject more RF signals to the twin-pair tags and trigger a change from the unreadable to readable state. Thus, a motion detection is available by observing the state change of twins tags. Other proposals use antenna arrays for device-free target detection. ArrayTrack [23] relies on an antenna array and MIMO technique to extract the location information from the signal along the direct path (i.e., the first path) and mitigate the multipath effect. Besides locating moving persons, researchers also focus on tracking gestures without the need of wearing any device [15, 24]. WiSee [15] extracts the Doppler Shift feature from wideband OFDM transmissions to recognize 9 kinds of gestures. This research has been extended to 3D scenario; for example, the work proposed in [24] implements a prototype of 3D gesture tracking using the FMCW technology. The work in [25] is another tag-free approach, which applies Doppler to support indoor navigation. Yet, it needs the cooperation of the user. In brief, the above works are all the attempts in device-free detection or tracking area; however they are unsuitable for our semiopen scenario, and hardly to achieve our goal.
8. Conclusion
In this paper, we propose a novel device-free object detection and tracking schema on passive RFID systems, named DTrack. We theoretically analyze the influence of human objects on tag backscattered Doppler signals. Based on the effect, we propose a Doppler-based method to effectively detect whether a human object enters the surveillance area. Accompanied with NTRR-based method, our system also can track his moving direction. The extensive experiments and high-accuracy results demonstrate the effectiveness of our system.
Footnotes
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Acknowledgments
This work was supported in part by NSFC under Grants nos. 61325013, 61190112, 61373175, and 61402359; the Natural Science Basic Research Plan in Shaanxi Province of China under Grant no. 2014JQ832; the Specialized Research Fund for the Doctoral Program of Higher Education under Grant no. 20130201120016.