
Abstract
Underwater Acoustic Sensor Networks (UASNs) have drawn great attention for their potential value in ocean monitoring and offshore exploration. In order to make the underwater application possible, the unique characteristics of underwater acoustic channels and continuous node movement inspired the emergence of routing protocols for underwater environment. In this paper, we introduce and compare four prominent routing protocols proposed for UASNs, namely, H2-DAB, GEDAR, E-PULRP, and PER. Performances of the routing protocols are evaluated in terms of the average number of control packets, end-to-end delay, data delivery ratio, and total energy consumption. The impact of water currents on the routing algorithms is also analyzed in our simulation. Experimental results demonstrate that E-PULRP provides high data delivery ratio at the cost of end-to-end delay. H2-DAB has better real-time performance for minimal delay transmission. GEDAR efficiently addresses the problem of void region without introducing extra energy. PER requires the most control packets in the process of routing establishment. Our work aims to provide useful insights to select appropriate routing protocols to fulfil different application requirements in UASNs.
1. Introduction
Nearly 71% of the Earth's surface is covered by water. The deep ocean is a vast and mostly unexplored habitat on our planet. Recently, there has been a growing interest in exploring and monitoring ocean environments for scientific exploration, commercial exploitation, or defense and security purposes. Because of the inhospitable environment (e.g., unpredictable underwater activities and high water pressure), unmanned exploration is a promising solution for discovering the aqueous environment. Over the past few years, Underwater Acoustic Sensor Networks (UASNs) have shown great value in ocean exploration activities and attracted the interest of many researchers [1–4]. In an UASN, sensor nodes are deployed in underwater environment, covering the entire monitored space to cooperatively fulfill monitoring tasks. In order to make the underwater application possible, it is essential to propose efficient routing protocols that achieve reliable communications.
Although many routing protocols for Terrestrial Wireless Sensor Networks (TWSNs) [5, 6] have been researched up to now, the design of routing protocol in UASNs is still a challenging problem due to the following reasons: (1) limited communication bandwidth, (2) high propagation delay, (3) high bit error ratio, and (4) batteries being energy constrained and not able to be recharged (solar energy cannot be exploited in underwater environment) [7]. Also, in a TWSN, nodes are always considered to be static so that the location information can be easily acquired through localization algorithms or GPS [8]. Oppositely, due to the water currents or marine organisms, floating node mobility is an inevitable issue in UASNs [9, 10]. In this regard, traditional routing protocols designed for TWSNs cannot be directly applied to UASNs.
UWSNs rely on underwater acoustic communications because high-frequency radio signals used in TWSNs can be rapidly absorbed by water [11]. The propagation delay is five orders of magnitude higher than in radio frequency terrestrial channels [2]. Moreover, data forwarding is a complex procedure in underwater environment because of the time-dependent temperature, pressure, salinity, lightness, and biology activity [9]. Due to the fact that continuous node movement makes it hard to manage the location information of sensor nodes, it is a challenging task to find and maintain the routes for dynamic underwater environments. Since energy harvesting is almost unavailable in the ocean [12], optimizing the amount of energy used for data transmission is also an important issue in routing protocol design. Based on the analysis above, more efficient routing protocols in UASNs should be developed to ensure reliable data delivery while optimizing energy consumption.
The main contribution of this paper is that we introduce and compare the performance of four routing protocols which are suitable for large-scale UASNs. The schemes are hop-by-hop dynamic addressing based (H2-DAB) [13], geographic and opportunistic routing with depth adjustment-based topology control for communication recovery (GEDAR) [14], energy optimized path unaware layered routing protocol (E-PULRP) [15], and power-efficient routing (PER) [16] protocol. To the best of our knowledge, this is the first work that studies performance evaluations of H2-DAB, GEDAR, E-PULRP, and PER. We use MATLAB as the simulation tool and compare the performance of the protocols in terms of the average number of control packets, end-to-end delay, data delivery ratio, and total energy consumption. To embody the dynamic characteristic of UASNs, we also analyze the impacts of water currents on the performance of the routing protocols. The characteristics of each protocol are revealed by quantities of comparison experiments. The purpose of this work is to provide useful insights to select appropriate routing protocols to fulfil different application requirements in UASNs.
The remainder of the paper is organized as follows. Section 2 summarizes typical routing protocols designed for UASNs. Section 3 introduces H2-DAB, GEDAR, E-PULRP, and PER in detail. A detailed analysis of simulation results is discussed in Section 4. Section 5 draws conclusions and points out the direction of future research.
2. Related Work
In the literature, most existing routing protocols can be classified into two categories: geographic-based routing protocols and hybrid-based (both energy-based and geographic-based) routing protocols. Geographic-based protocols (e.g., [13, 14, 16–21]) leverage the location information of sensor nodes to forward packets from a source node to a destination node. Besides geographic information, hybrid-based protocols (e.g., [2, 15, 22–26]) also take into account the energy optimization. In the rest of the section, representative geographic-based and hybrid-based routing protocols are reviewed, respectively.
2.1. Geographic-Based Routing Protocol
In [17], Yan et al. proposed a depth-based routing (DBR). In DBR, with the depth of each node known from pressure sensors, data packets are forwarded along the upward direction. Multisinks are introduced in DBR to improve the routing success ratio. The packet delivery ratio depends upon the node distribution and the number of sinks. Based on DBR, two improved protocols, namely, adaptive mobility of courier nodes in threshold-optimized depth-based routing (AMCTD) [18] and depth-based multihop routing (DBMR) [19], are proposed.
In [18], Jafri et al. proposed an adaptive mobility of courier nodes in threshold-optimized depth-based routing (AMCTD). AMCTD addresses the problems of little stability period, swift energy consumption of low-depth nodes, and poor throughput during the instability period caused by unequal load distribution among the nodes. In order to prolong the network lifetime, AMCTD explores the proficient amendments in depth threshold and implements the optimal weight function.
In [19], Liu and Li proposed a depth-based multihop routing (DBMR). Since DBR uses flooding mode for transmission, a large amount of redundant data forwarding and channel occupancy might be caused. To reduce communication overhead, DBMR adopts multihop to send packets. Moreover, DBMR can take advantage of multiple-sink underwater sensor network architecture without introducing extra cost.
In [20], Chen and Lin proposed a mobicast routing protocol (MRP) which takes the mobility of nodes into consideration. Packets can be gathered within a sphere centered in an autonomous underwater vehicle (AUV). Nodes within the range of the sphere upload data packets to the AUV. The other nodes are in idle state to wait for the arrival of the AUV. The sphere can be split up into slices due to the effect of water currents. When the nodes in a slice drift away, the slice would be enlarged to contain more nodes. The slices would shrink to reduce the number of nodes when additional nodes flow into the slice.
In [13], Ayaz et al. proposed a hop-by-hop dynamic addressing based (H2-DAB) routing protocol. H2-DAB tackles the challenges of UASNs by implementing the dynamic addressing scheme among the sensor nodes without requiring the localization information.
In [14], Coutinho et al. proposed a geographic and opportunistic routing with depth adjustment-based topology control for communication recovery (GEDAR). GEDAR uses the greedy opportunistic mechanism to route data packet. To address the problem of void regions, GEDAR takes advantage of the depth adjustment apparatus in the current underwater sensor node technology and moves void nodes to new depths to adjust network topology.
In [21], Zhang et al. proposed a prediction based delay-tolerant protocol (PBDTP). PBDTP is designed to address the problems of link reliability, long delay, and inconsistent delay in UASNs. Using data prediction and adjustment algorithms, PBDTP can predict a value for a sensor node if its data were not received at the sink node.
In [16], Guo et al. proposed a generic prediction assisted single-copy routing (PASR). PASR employs an effective greedy algorithm ACPG which captures the features of network mobility patterns. Furthermore, an online heuristic protocol is designed by choosing appropriate historical information and forwarding criteria based on the guidance from ACPG.
2.2. Hybrid-Based Routing Protocol
In the design of routing protocol, energy optimization is also a major concern. In [2], Hu and Fei used an adaptive, energy-efficient, and lifetime-aware routing protocol based on reinforcement learning routing protocol (QELAR). In QELAR, the residual energy of each node, as well as the energy distribution among a group of nodes, is factored in throughout the routing process to calculate the reward function. The reward function aids in selecting the adequate forwarders for packets. Each node in the network is responsible for learning the environment, aiming to take the optimal action and improving the performance of the whole network gradually.
In [22], Wu et al. proposed a time-slot-based routing algorithm (TSR). A probability balanced mechanism named TSBR is applied to TSR to eliminate redundancy and reduce bit error ratio. The theory of network coding is also introduced to TSBR to meet the requirements of further reducing node energy consumption and extending the network lifetime.
In [15], Gopi et al. proposed an energy optimized path unaware layered routing protocol (E-PULRP). E-PULRP consists of two phases: layering phase and communication phase. In the layering phase, a set of concentric shells (layers) are formed around the central sink node. The layering structure ensures that the packet is forwarded towards the sink node. In the communication phase, one relay node is identified from each layer to forward the packet.
In [23], Huang et al. proposed a power-efficient routing (PER) protocol. Based on the fuzzy logic inference system, a forwarding node selector is employed to determine the appropriate sensors to forward the packets to the destination. Also, a forwarding tree trimming mechanism is adopted to prevent excess spread of forwarded packets.
In [24], Ali et al. proposed a layer-by-layer angle based flooding (L2-ABF) routing protocol. L2-ABF addresses the problem of nodes scatter in UASNs. In L2-ABF, without using any explicit configuration and location information, each node can calculate its flooding angle and then forward data packets to the next upper layer toward surface sinks. The number of nodes which flood the data packets is controlled by the angle for flooding cone to prevent flooding over the whole network. The flooding cone is adjusted in layer-by-layer manner by using the angle based technique among the upper layer nodes.
In [25], Du et al. proposed a level based adaptive geographic routing (LB-AGR) protocol. Based on available energy, density, location, and level-difference between neighbor nodes, LB-AGR defines an integrated forwarding factor for each candidate node. The integrated forwarding factor is used to determine the best next-hop among multiple qualified candidates.
In [26], Wahid and Kim proposed an energy-efficient depth-based routing (EEDBR) protocol. EEDBR utilizes the depth and the residual energy of sensor nodes as a routing metric. A sender-based approach is employed for routing where the sender decides a set of next forwarding nodes in order to reduce redundant transmissions from multiple forwarders.
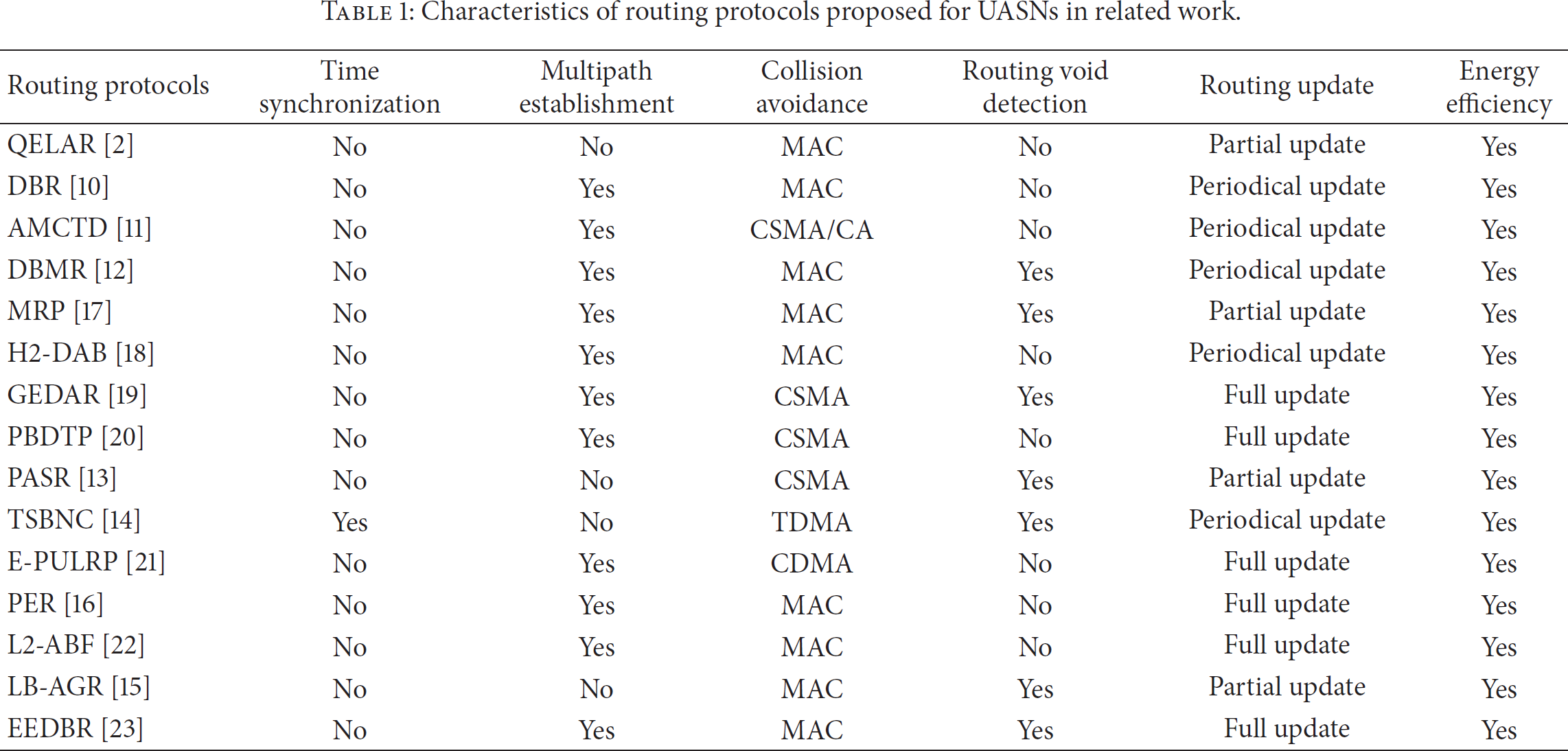
We conclude the characteristics of routing protocols mentioned above in Table 1.
Characteristics of routing protocols proposed for UASNs in related work.
3. Typical Routing Protocols for UASNs
Since routing protocols might differ depending on the application and network architecture, it is unfair and misleading to compare them without considering their assumptions and objectives. A comparative analysis based on a set of sample algorithms which share the same design assumptions and objectives is reasonable. In this section, four typical routing protocols proposed for UASNs, namely, H2-DAB, GEDAR, E-PULRP, and PER, are introduced in detail.
3.1. H2-DAB
To deal with the node mobility in UASNs, H2-DAB assigns a dynamic address (called HopID) to each sensor node based on the hop count from the sink node. The process is as follows. The sink node broadcasts a Hello packet. Each receiving node is assigned a HopID. Then, the receiving nodes increment the HopID and rebroadcast the Hello packet including the updated HopID. Since the HopID is increased hop by hop, the nodes closer to the sink will be assigned smaller HopIDs than the nodes away from the sink. During the forwarding of data packets, the nodes having small HopIDs are selected for forwarding the data packets. Multisink is employed to balance the energy consumption. When a routing path is invalid, the source node can choose other sink nodes to upload data. All the routing paths will be periodically updated when their deadline expires.
3.1.1. Addressing Schemes
As shown in Figure 1, each node calculates the hop count to two sinks and stores the hop count information. Taking Node 1 as an example, the least hop count it stores is one; it means that Node 1 can transmit its packets to a sink node (Sink 1) in one hop. And the second lowest hop count is nine; it means that there exists a sink node which is nine hops away from Node 1. The routing path which has the least hop count is selected as primary path while the other which has the second lowest hop count works as an alternate path.
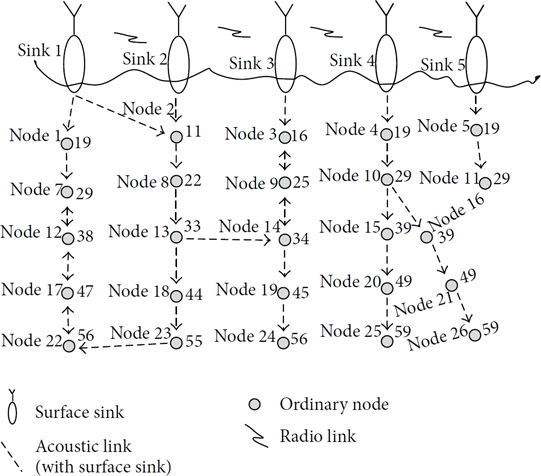
An example of dynamic addressing.
3.1.2. Route Updating and Maintenance
Before the deadline of the route expires, if the whole network is affected by low-speed water current for a short time, the previous routing path is regarded as valid. Otherwise, hop count of each node would be recalculated according to updated network topology information.
3.2. GEDAR
GEDAR takes the advantage of greedy opportunistic forwarding to improve data delivery ratio. With the capability of depth adjustment, the problem of void region can be addressed. Therefore, the connectivity between the source node and the sink can be ensured. GEDAR uses multisink to balance energy consumption in UASNs.
3.2.1. Greedy Forwarding Strategy
A greedy opportunistic forwarding strategy is applied for next-hop forwarder selection. The main idea is to advance the packet towards some sonobuoy in each hop. Given the Euclidean distance between a source node and the candidate forwarder node and the packet delivery probability of packets, the normalized advance (NADV) [27] is defined as the product of the Euclidean distance and the delivery probability. Besides achieving trade-off between proximity and link cost, NADV is used to determine the priorities of the candidate nodes. The neighbor which has the largest NADV is selected as the primary forwarding node while the neighbor which has the second largest NADV is selected as an alternative forwarding node. In general case, packets are propagated by forwarders which have the highest priorities. When predefined waiting time expires, primary forward nodes still fail to deliver the packets; alternative forwarding nodes can replace the primary forward nodes and complete the propagation of the packets.
3.2.2. Recovery Mode
If a node cannot forward a packet using the greedy forwarding strategy, GEDAR switches to the void node recovery mode. GEDAR allows void nodes to broadcast announcement messages to their neighbors. The neighbors that receive the void node announcement message will remove the void node from their routing table. Through mapping a 3D environment into a 2D plane, the void node then determines the new depth such that the distance to its closest sonobuoy is greater than the distance of the neighbor to the nearest sink. And then, void nodes adjust their depth which results in the minimum displacement. If the node cannot determine a new depth, the recovery mode function is called again.
3.3. E-PULRP
E-PULRP is an improved protocol based on path unaware layered routing protocol (PULRP) [28]. E-PULRP consists of two phases, namely, layering phase and communication phase. Different from H2-DAB and GEDAR, only one sink node is allowed in E-PULRP.
3.3.1. Layering Phase
In E-PULRP, a set of concentric shells (layers) are formed around the central sink node. Figure 2 is a planar graph of the layered network, where

An example of layered network.
3.3.2. Communication Phase
Packets are forwarded from outer layer to the sink. When a source node uploads data to the sink, it enquires its neighbors which belong to an inner layer. Based on neighbor nodes' response time and their residual energy, the best next forwarding node can be chosen.
3.4. PER
The architecture of PER consists of two modules, namely, a forwarding node selector and a forwarding tree trimming mechanism. As shown in Figure 3(a), the forwarding node selector selects at most two candidate sensor nodes to forward the packets. In Figure 3(b), a forwarding tree trimming mechanism is used to prevent unnecessary power consumption of the sensor nodes from fast spreading of packet forwarding over the UASNs.

Packet forwarding tree.
3.4.1. Fuzzy Logic System and Decision Tree
Fuzzy logic system is adopted as a candidate as the forwarding node selector. The forwarding node selector utilizes the three parameters, including the distance and the angle between two neighboring sensor nodes, and the remaining energy left in the sensor node as input of fuzzy logic system. In PER, a typical C4.5 decision tree [29] is adopted to cooperate with fuzzy logic system; a decision tree and fuzzy logic system collaborate to determine the next forwarder.
3.4.2. Forwarding Tree Trimming Mechanism
An intermediate sensor can employ the trimming mechanism to forward the packets to the top-selected forwarding node. The intermediate sensor then transmits the packets to the second selected forwarding node if the number of duplicated packets received by the intermediate sensor does not exceed a preset threshold. This mechanism not only resolves the problem of broadcast packet, but also prevents the disruption of packet forwarding from the inappropriate selection of forwarding nodes.
4. Performance Analysis and Comparison
4.1. Energy Consumption Model
We use the energy consumption model proposed in [30]. The energy dissipation of each node consists of transmission and receiving. According to Thorps expression [31], the absorption coefficient 
4.2. Simulation Setup
In this paper, we use MATLAB to simulate the performance of H2-DAB, GEDAR, E-PULRP, and PER. Sensor nodes are randomly deployed in a 500 m × 500 m × 500 m area. Since H2-DAB and GEDAR work in a network with multisink while E-PULRP and PER use one sink, in Figure 4, we show two examples of underwater network topologies. Figure 4(a) is a network consisting of one sink node and 150 ordinary nodes while Figure 4(b) is a network consisting of multisinks and 150 ordinary nodes. The sink node is assumed to be static deployed on the surface of water. The generation of packets in the network follows Poisson process with parameter
Simulation parameters.

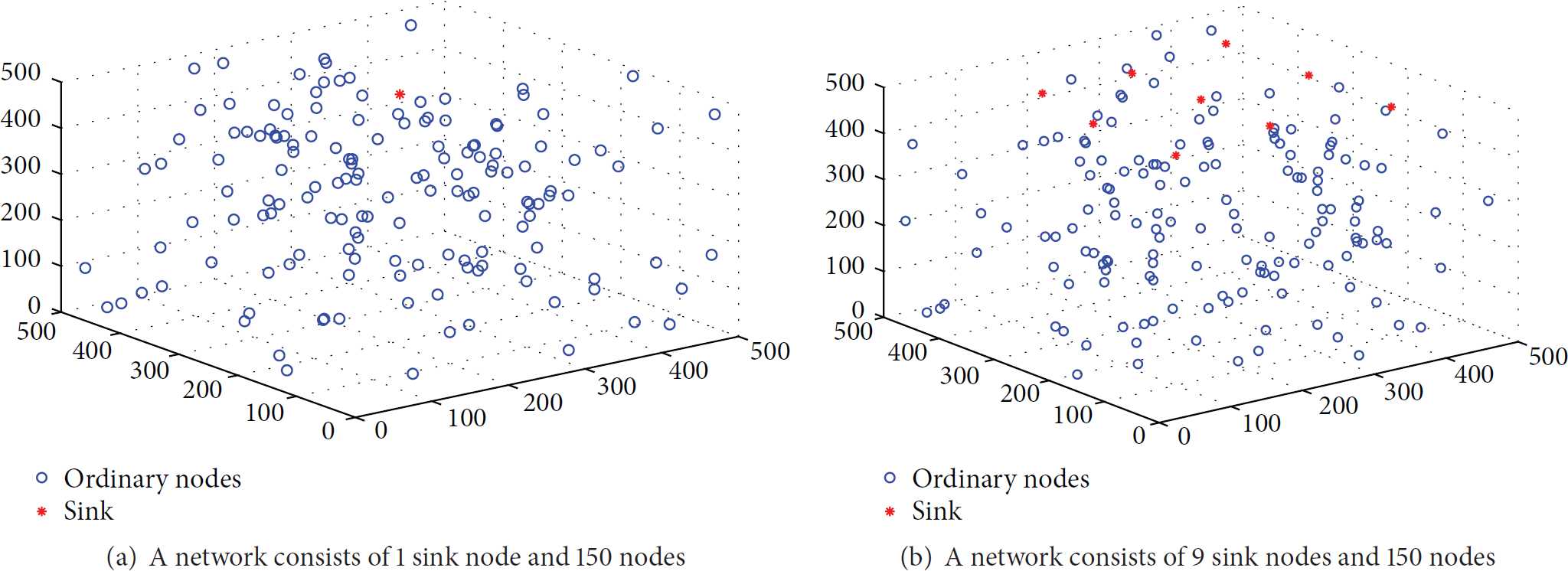
Sensor node deployment in UASNs.
4.3. Performance Metrics
The average number of control packets per node is defined as the ratio of control packets to the number of relay nodes. The end-to-end delay is the time span from the routing establishment to the instant when the packets are received by sink. The data delivery ratio is the percentage of packets which are successfully uploaded to the sink. The total energy consumption is the sum of energy consumed for transmission and receiving in the process of routing establishment.
In our simulations, we design two groups of experiments for each evaluation criterion. In the first group, we simulate a stable underwater environment. In the second group, we introduce the mobility and research the impact of water currents on the protocols.
4.4. Simulation Results
4.4.1. Static Environment
Figure 5 highlights the effect of nodes on the average number of control packets. We change the number of nodes from 150 to 350 with an increment of 25. It can be observed that, with the increase of nodes, the average number of control packets of H2-DAB, GEDAR, and E-PULRP increases slowly. It can be explained that these protocols forward packets to the direction of destination rather than in a random way so that the number of control packets can be restricted. PER shows a largest growth on the average number of control packets because it does not have definite forwarding direct so that additional control packets are needed to be used to establish the routing path. In addition, with the increase of nodes, much more neighbors should be enquired.
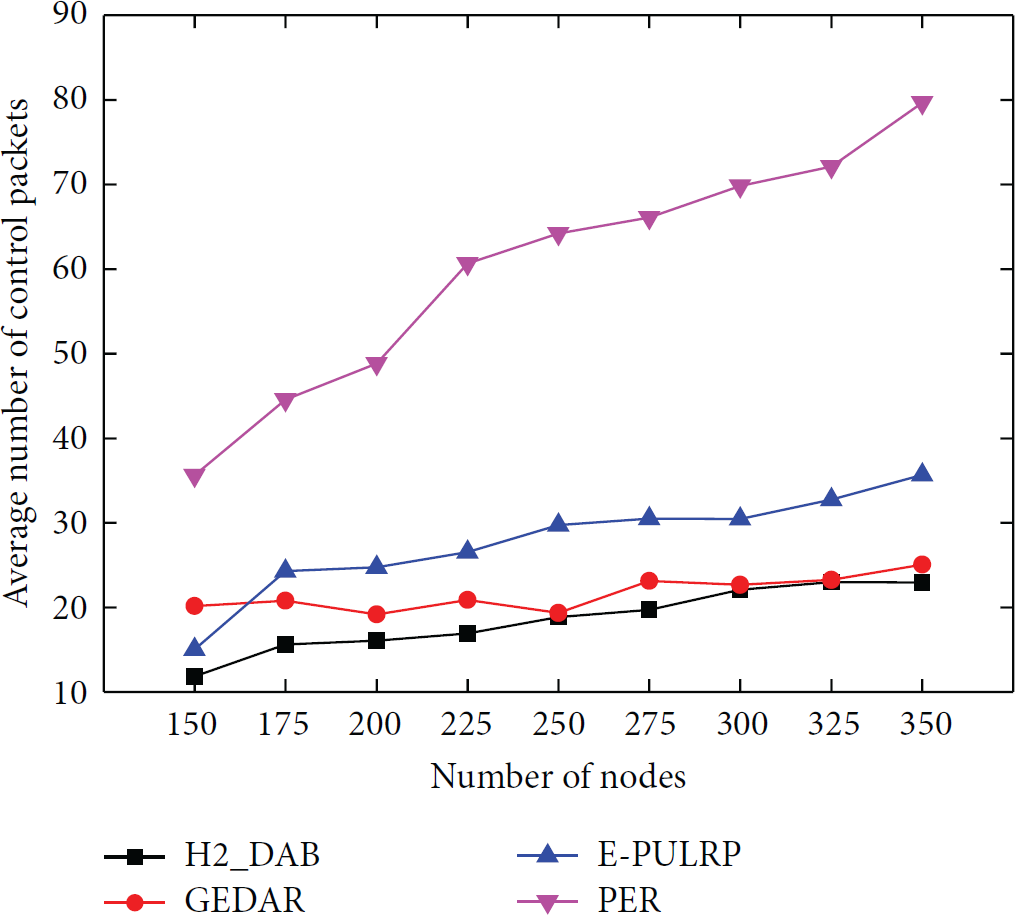
Comparison of the average number of control packets per node.
Figure 6 shows the change of the end-to-end delay with different number of nodes. Notably, when the network is sparse (e.g., only 150 nodes), each protocol achieves high end-to-end delay. Because the bandwidth of acoustic channel is limited, the number of relay nodes is small and data packets are accumulated in the forward queue which results in a high end-to-end delay. With the increase of nodes, such delay can be reduced. Much more nodes function as relay nodes so that packets can be forwarded without waiting for a long time. It can be observed that, under the same circumstance, the E-PULRP and GEDAR achieve higher delay than that of PER and H2-DAB. This is because E-PULRP and GEDAR preset waiting time to find forwarding nodes which increases the time of routing discovery and establishment.
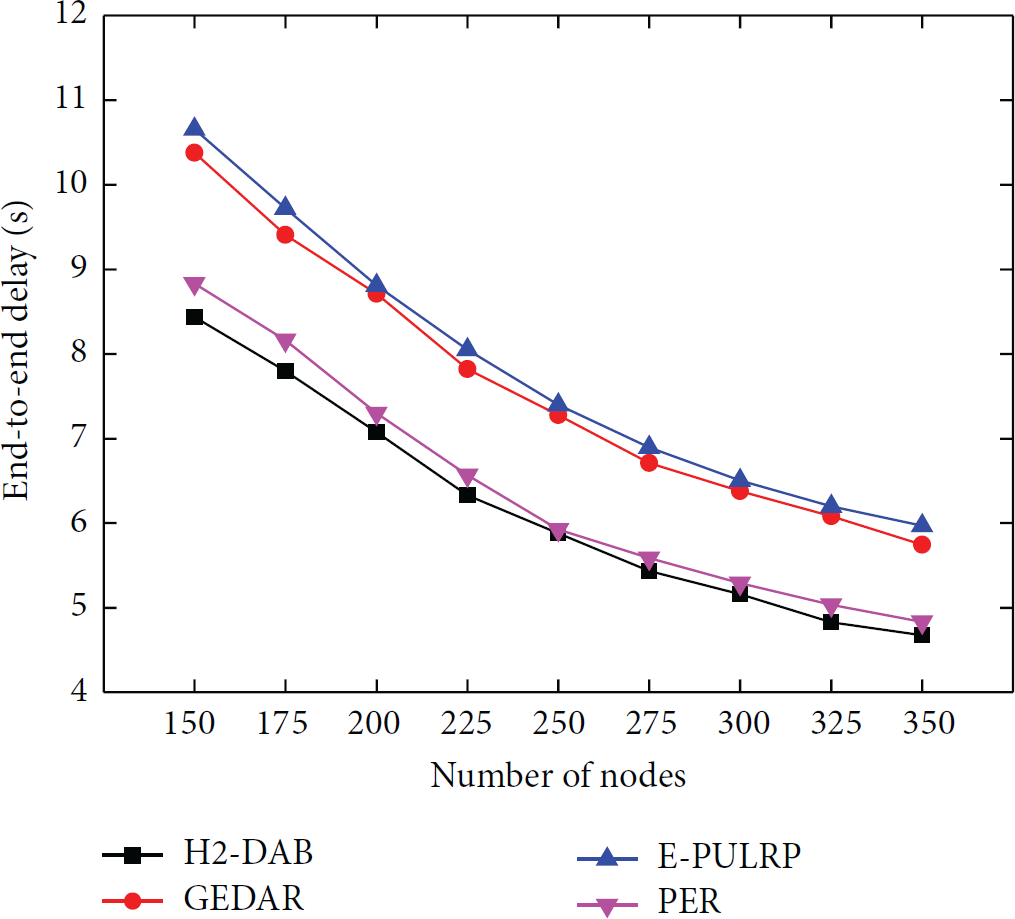
Comparison of end-to-end delay.
Figure 7 shows the change of the data delivery ratio with different number of nodes. It can be observed that the data delivery ratio is small when the network consists of few sensor nodes. With the supplement of nodes, much more nodes in the network mean many alternative routing paths can be established to ensure the success rate for data transmission. Moreover, the package loss ratio and the retransmission ratio can be also reduced. We find out that E-PULRP outperforms other protocols because it sacrifices the route establishing time to achieve reliable data forwarding. A backup route can be established in H2-DAB to deal with the failed transmission so that the performance of H2-DAB in terms of data delivery ratio is second only to E-PULRP.

Comparison of data delivery ratio.
Figure 8 shows the relationship between the total energy consumption and the number of nodes. The total energy consumption increases with the increase of nodes. Reasons can be explained as follows. First, much more packets are generated with the increase of nodes. It means that large amount of energy is consumed to upload the additional packets. Also, since a node might have much more neighbors with the increase of nodes, the number of broadcast packets as well as control packets increases. In this regard, communication overhead increases with the increase of nodes.
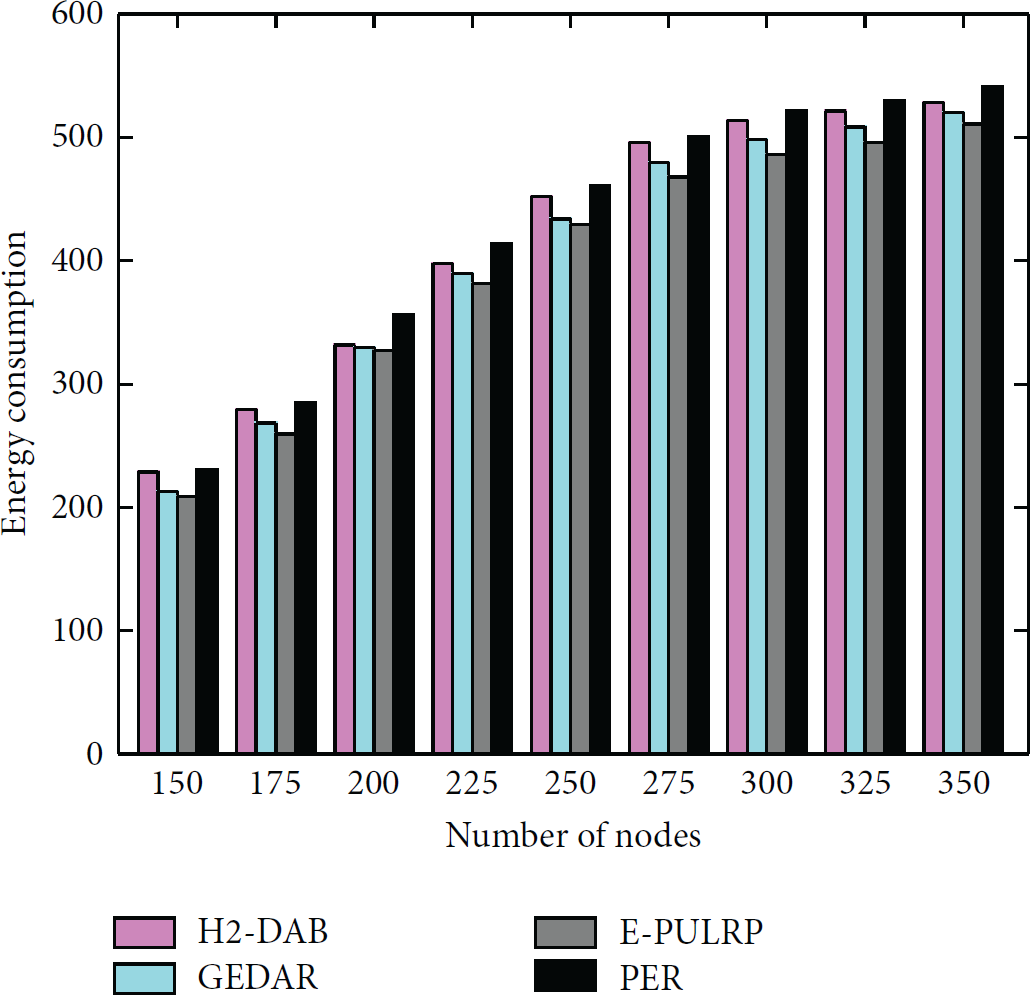
Comparison of total energy consumption.
4.4.2. Dynamic Environment
We simulate a dynamic environment with different water velocities. Nodes are assumed to drift back to the network when they reach the boundary of the environment. In our simulation, we study the impact of horizontal movement on the protocols.
Figure 9 depicts the influence of the number of nodes on the average number of control packets in two dynamic environments. It can be observed from Figures 9(a) and 9(b) that the average number of control packets increases with the increase of nodes. Compared with static environment, more control packets are required in a dynamic environment to describe the change of the topology caused by node mobility. When the network consists of the same number of nodes, high-speed water currents contribute to a great increase in the average number of control packets.

Comparison of the average number of control packets for each node at different water velocities.
Figure 10 depicts the relationship between the end-to-end delay and the number of nodes in two dynamic environments. The end-to-end delay is reduced with the increase of nodes. It can be observed that when the network consists of the same number of nodes, low-speed water currents do not bring about great increase in the end-to-end delay. This is because the location of nodes fluctuates slightly by the low-speed water; previous routes might be still valid. Thus, the end-to-end delay achieved by each protocol does not change greatly.

Comparison of the end-to-end delay at different water velocities.
Figure 11 shows the change of the data delivery ratio with various numbers of nodes in two dynamic environments. The data delivery ratio is increased with the increase of nodes. In a dynamic environment, the data delivery ratio is decreased by the effect of water currents. High-speed current results in a great change in the position of nodes. Because of the node mobility, the topology of UASNs changes frequently. Thus, previous routing path is invalid and should be rebuilt according to the updated information of network topology. In this regard, water velocity has negative effects on data delivery ratio.

Comparison of data delivery ratio at different water velocities.
Figure 12 shows the change of the total energy consumption with various numbers of nodes in two dynamic environments. As shown in Figure 12, the total energy consumption increases with the increase of nodes. The supplement of nodes helps to construct more available routing paths for data transmission. However, the energy consumption is also increased because of the additional data packets generated in the network. Also, the network which suffers from high-speed current consumes more energy than that which suffers from low-speed current. Both the position of nodes and neighbor relationship will be changed greatly by the high-speed current; this means that most of the previous routing paths are invalid and should be rebuilt.

Comparison of total energy consumption at different water velocities.
4.4.3. Comparison Summary
Compared with the static environment, additional control packets are required to ensure the operation of each protocol in the dynamic environment. With the increase of water velocity, all the protocols show a worse performance in terms of end-to-end delay, data delivery ratio, and energy consumption. Since the network topology is greatly changed by high-speed current, most previous routing paths constructed by the protocols are invalid. The reconstruction of routing brings about additional routing time and energy consumption.
5. Conclusion and Future Work
Due to the unique characteristics of UASNs, traditional routing protocols in TWSNs expose many drawbacks in UASNs. In this paper, we introduce four routing algorithms for large-scale UASNs and compare their performances in terms of average number of control packets, end-to-end delay, data delivery ratio, and total energy consumption. Simulation results show that E-PULRP provides high data delivery ratio at the cost of end-to-end delay. H2-DAB has better real-time performance for minimal delay transmission. GEDAR can efficiently address the problem of void region without introducing extra energy. PER requires the most control packets in the process of routing establishment. Four protocols show similar performance in terms of total energy consumption. We also study the impact of current on the protocols. We find out that both H2-DAB and GEDAR take into account the node mobility; they can be managed easily during the quick routing changes where node movements are frequent. However, high-speed current still degrades their performances to some degree. E-PULRP and PER can achieve high energy efficiency while little attention is paid to the node mobility. Thus, they are not robust to the change of network topology caused by node mobility. Through revealing the characteristics of each protocol, our work aims to provide useful insights to select appropriate routing protocols to fulfil different application requirements in UASNs.
Further research should consider other network performance criteria such as the quality of service (QoS) issues posed by real-time applications and secure routing required by military applications. Nonetheless, with the increasing functionalities available to an underwater sensor node, more complicated tasks which involve more energy consumption and network overhead may be assigned to the sensor nodes. Thus, how to increase energy efficiency and scalability of the network remains a challenging research area.
Footnotes
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Acknowledgments
The work is supported by Qing Lan Project, Natural Science Foundation of Jiangsu Province of China (no. BK20131137), 2013 Special Fund of Guangdong Higher School Talent Recruitment, Educational Commission of Guangdong Province, China (Project no. 2013KJCX0131), Guangdong High-Tech Development Fund (no. 2013B010401035), 2013 Top Level Talents Project in “Sailing Plan” of Guangdong Province, National Natural Science Foundation of China (Grants nos. 61572172 and 61401147), and 2014 Guangdong Province Outstanding Young Professor Project.