
Abstract
Since the wireless sensor network (WSN) has the performance of sensing, processing, and communicating, it has been widely used in various environments. The node localization is a key technology for WSN. The accuracy localization results can be achieved in ideal environment. However, the measurement may be contaminated by NLOS errors in rough environment. The NLOS errors could result in big localization error. To overcome this problem, we present a mobile node localization algorithm using TDOA and RSS measurements. The proposed method is based on Kalman framework and utilizes the general likelihood ratio method to identify the propagation condition. Then the modified variational Bayesian approximation adaptive Kalman filtering is used to mitigate the NLOS error. It could estimate the mean and variance of measurement error. The simulation results demonstrate that the proposed method outperforms the other methods such as Kalman filter and
1. Introduction
Localization has been studied extensively during the past decades. The most widely used localization system is the Global Positioning System (GPS). However, the localization accuracy of the GPS would dramatically degrade in rough environment such as building and covered space [1]. In addition, the GPS module is too costly if each beacon node equipped it. With the development of the low cost communication equipment, sensor and microprocessing, wireless sensor network (WSN) has attracted more and more attention. WSN owning the abilities of self-organization, self-adaptation, and self-repair, it has been widely used in covered space localization.
For WSN based localization system, the localization methods can be categorized as range-free and range-based methods. The range-free methods employ the minimum hops between the unknown node and beacon node and the hop distance to localize the position of unknown node, such as DV-hop method and the improved DV-hop methods [2, 3]. These methods do not need to measure distance accurately. Therefore, it is applicable to the large-scale localization environment. The range-based methods employ the measurements such as time of arrival (TOA), time difference of arrival (TDOA), and received signal strength (RSS) [4]. The TOA method calculates the distance through the signal propagation time between the unknown node and beacon node. It needs higher clock synchronization of local clock. The TDOA method estimates the distance via the signals propagation time difference. It does not need the clock synchronization. The RSS method converts the received signal strength to the distance. It is easily affected by reflection. In most situations, the node is not static. The mobile node localization has the high practical significance.
In this paper, we consider the localization of mobile node in NLOS environment in which the density of beacon nodes is low. Two main contributions of this paper are listed as follows.
Multiple measurements (TDOA and RSS) are used to identify the propagation condition. A Kalman framework based mobile localization algorithm is proposed. The modified variational Bayesian approximation adaptive Kalman filtering is used to filter the measurements in NLOS condition.
The remainder of this paper is organized as follows: in Section 2, we describe the related works about the mobile localization for wireless sensor network. The system model and some basic notations are presented in Section 3. In Section 4, the proposed mobile node localization method is presented. The simulation results are presented in Section 5. Section 6 concludes this paper.
2. Related Works
Several methods have been proposed to estimate the position of mobile node. The localization modes can be categorized as follows: active localization and passive localization. The steps of active localization are described as follows: the mobile node transmit the signals to beacon nodes, and then the beacon nodes receive the signal and estimate the distances; the base station collects the distances from the beacon nodes and estimates the position of mobile node. The steps of passive localization are as follows: the beacon nodes transmit the signals in order; and then it uses these distances to estimate the location of mobile node. In this paper, we investigate the active localization method.
An innovative mobile positioning method in chain-type WSN is proposed [5]. The kernel canonical correlation analysis is used to select the maximum correlation signals from several sets of nonlinear signals. Then the constrained total least squares method is derived to solve the position of mobile node after considering inaccurate anchor node and measurement constraints. In [6], a timing-based mobile sensor localization algorithm is introduced. The sensor nodes determine the distance from the beacon nodes by using the propagation time and speed of RF signal. The beacon nodes broadcast the reference beacons according to the mobility of sensor node and the required localization accuracy. These reference beacons carry the interval numbers which are used to calculate the start time of the beacons locally. Then the start time is used to determine the propagation time. This method does not need any time synchronization among the sensor nodes. A min-max approximation approach is proposed to estimate the location for tracking which can be solved through the semidefinite programming relaxation method, and a cubic function is proposed for mobile sensor navigation [7]. And then a weighted tracking method is proposed by using the measurement information more efficiently. A cooperative localization algorithm [8] for mobile nodes is proposed. This method needs a small number of beacon nodes and reduces amount of energy consumption.
For some special scenarios such as indoor and forest environments, the propagation condition of signal is not the line of sight. The direct propagation path may be blocked by the obstacles. The mobile localization in nonline of sight (NLOS) environment is one of the most important challenges for WSN. In [9], a cooperative localization method for mobile sensor node in mixed LOS and NLOS environment base on measuring TOA is proposed. This method firstly employs the multiple-model sampling importance resampling particle filter to approximate the associated nonlinear and non-Gaussian recursive Bayesian problem. And then the Rao-Blackwellization technique is used to track the position. A discrete-time H-infinity filter with input forcing function is derived for mobile localization using WSN [1]. The estimated position is obtained by the filter using an integration of information from WSN and absolute acceleration data obtained by the inertial measurement unit. In [10], a CSS-specific adaptive likelihood functions for a particle filter that integrates the dynamic noise model. The proposed CSS-specific probability distribution model could solve the nonlinear problem of ranging. A Kalman base hypothesis testing algorithm is proposed for NLOS localization [11]. The hypothesis testing is employed to identify the propagation conditions of the signals. Then the Kalman filter is used for nonlinear estimation.
Interacting multiple-model (IMM) based localization is a representative technique for mobile nodes in NLOS environments. A Kalman based interacting multiple-model smoother is proposed for mobile location estimation using TOA measurement [12]. The LOS and NLOS conditions are considered as Markov process. Then the Kalman based IMM smoother is proposed to smooth the measurement. In [13], an extended Kalman based IMM smoother is proposed with data fusion of the TOA and RSS measurements. The extended Kalman filter is used for nonlinear estimation. It is combined with IMM to smooth the measurements. And the data fusion method is employed to combine the results of different condition. In [14], the extended Kalman filter and robust Kalman filter are used in parallel in the multiple-model frameworks. And the state estimates of wither filters are combined based on confidence. This method does not assume any statistical knowledge of the NLOS errors. Therefore, it can be used in any measurement.
3. Problem Statement
In this section, we firstly introduce the basic notations. And then TDOA and RSS ranging models are stated. Finally the state and measurement models are described in this section.
3.1. Basic Notations
We consider a sensor network which consists of N beacon nodes at the positions denoted by a set of two-dimensional vectors
In this paper, we assume that the beacon node could measure the RSS and TDOA with no loss of data. Since the ultrasound transmitter has a directional range pattern, we assume that each node has several ultrasound transmitters and receivers that are arranged radically to achieve an omnidirectional range pattern [8]. The difference between the LOS and NLOS condition lies in the noise distributions in TDOA measurement and in different parameters in RSS measurement. As shown in Figure 1,

The schematic diagram of the NLOS propagation.
3.2. TDOA Ranging Model
The true TDOA between the ith beacon node and the mobile node is denoted as
Since

Therefore, the approximate true distance is given by

The measurement will be contaminated inevitability by the noise in LOS condition, so the estimated distance is expressed as

For NLOS condition, the ultrasound signal will travel more distance because of the effect of reflection and diffraction. It will result in the NLOS errors. So the measurement noises from two aspects: the random noise and NLOS errors. The random noise and NLOS errors are not independent. The measured distance in NLOS condition is given by


In this paper, we assume that the NLOS errors obey the Gaussian distribution (

3.3. RSS Model
The log-normal shadowing model [15, 16] is employed to reveal the relationship between the received signal strength and the distance. In LOS condition, the RSS of the ith node at time k can be expressed as

3.4. State Model and Measurement Model
For the ith beacon node, the state vector [17] is defined by

In this paper, we consider that the mobile node is moving at a constant velocity. Therefore, the state equation is given by

We combine the RSS and TDOA measurements into an equation. According to (4) and (8), the measurement equation in LOS condition can be defined as

According to (5) and (8), the measurement equation in NLOS condition can be defined as
4. Proposed Mobile Localization Method
In this section, we describe the proposed mobile localization method. Firstly the mobile localization framework is introduced. Then the steps of the proposed method are described in detail.
4.1. Localization Framework
The localization framework is shown in Figure 2. The Kalman prediction is firstly employed to predict the state and covariance equations. Then we identify the propagation condition of the beacon node. The classical Kalman update steps are used if the propagation condition is LOS; otherwise, the modified variational Bayesian approximation adaptive Kalman filtering (VB-AKF) is used. The modified VB-AKF could estimate the mean of the measurement noise and we subtract it to mitigate the effect of the NLOS errors.

The flowchart of the proposed method.
4.2. Kalman Prediction
For initializing the Kalman prediction, we employ the TDOA measurement as the initial value and the initial velocity is assumed as 1 m/s; that is,

4.3. NLOS Identification Method
The general likelihood ratio (GLR) method [18, 19] is employed to identify the propagation condition. We assume that the propagation condition is LOS. And the TDOA measurement is assumed as the true distance. The PDF of RSS in LOS condition is given by

The PDF of RSS in LOS condition is shown as

The likelihood ratio is defined as

If
4.4. Classical Kalman Update
Kalman Filter is the optimal estimate for linear system models, but the measurement equations (11)-(12) are nonlinear. So we should linearize the measurement equation as


The measurement residual is

The residual covariance is given by

The Kalman gain is

The updated state estimate and covariance equations are

4.5. Modified VB-AKF
Variational Bayesian approximation adaptive Kalman filtering combines the variational Bayesian estimation method and Kalman filter to simultaneously estimate the state and measurement noise. In order to obtain the analytical solution of the measurement noise for optimal Bayesian filter, the variational Bayesian approximation is used to estimate the variance of the measurement noise [20, 21]. VB-AKF can adapt to the measurement noise covariance varying quickly in a large scope and its computational complexity is low. Therefore, it is suitable for the application of the wireless sensor network.
If the identified propagation condition is NLOS, we employ the modified VB-AKF method to mitigate the NLOS error. It could estimate the mean and variance of the measurement. We subtract the mean in measurement residual equation. This method consists of two steps as follows.
Parameter transfer steps to calculate the weight coefficients. Consider
Update steps.
The estimated covariance of the measurement noise is

The estimated mean of measurement noise is

The Kalman gain is

The updated state estimate equation, covariance equation, and weight coefficients are

4.6. Localization
For the ith beacon node, the filtered distance can be obtained at time k as

We employ the maximum likelihood method to estimate the location of mobile node. The positions of beacon nodes are

The linear equation

We can obtain the coordinate matrix of the mobile node as follows:

5. Simulation Results
This section describes the results of simulations conducted using the proposed mobile localization method. The problem considered in this paper concerns low-density beacon node environment. The measurement frequency is 1 Hz. N beacon nodes are randomly deployed in an 8 m × 8 m space. The mobile node moves at an average of 0.1 m/s. The propagation condition between the mobile node and beacon node is generated randomly. Figure 3 shows the localization environment. We compared the proposed method with the classical Kalman filter (KF) and

The model parameters.

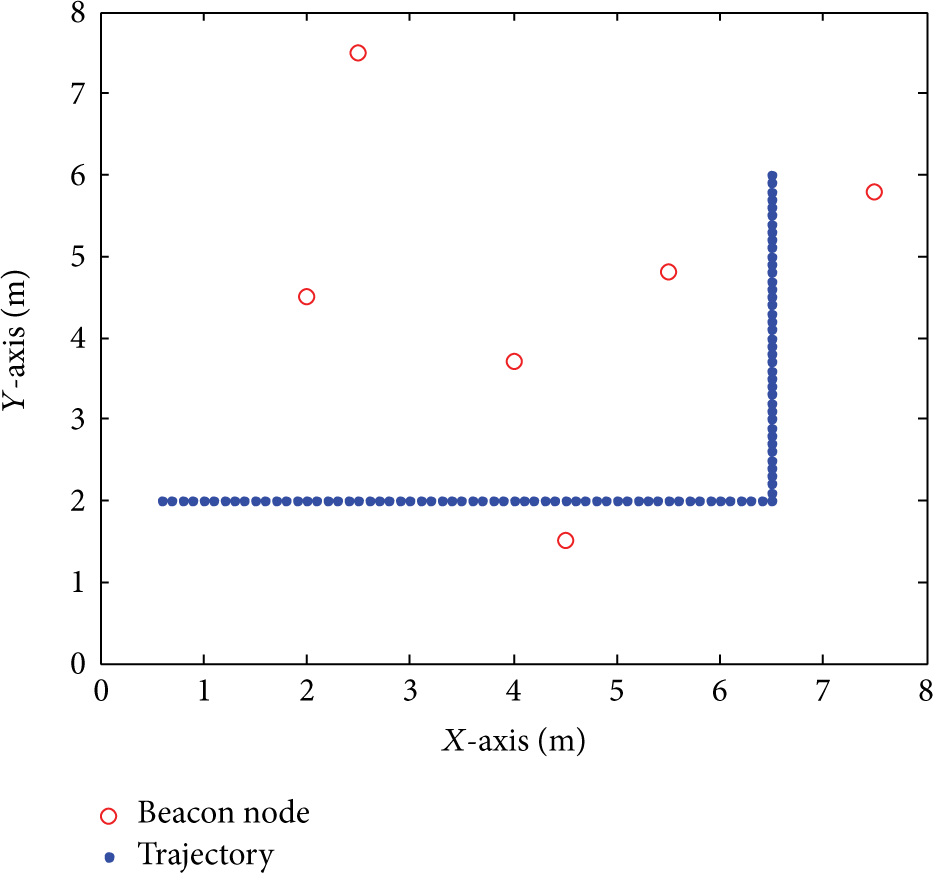
The localization environment.
Figure 4 shows the propagation condition for beacon nodes 1 and 2. The value 1 denotes the propagation condition NLOS, and 0 denotes the LOS. We can see that the propagation condition switches between the LOS and NLOS frequently, so the localization environment is very complex.
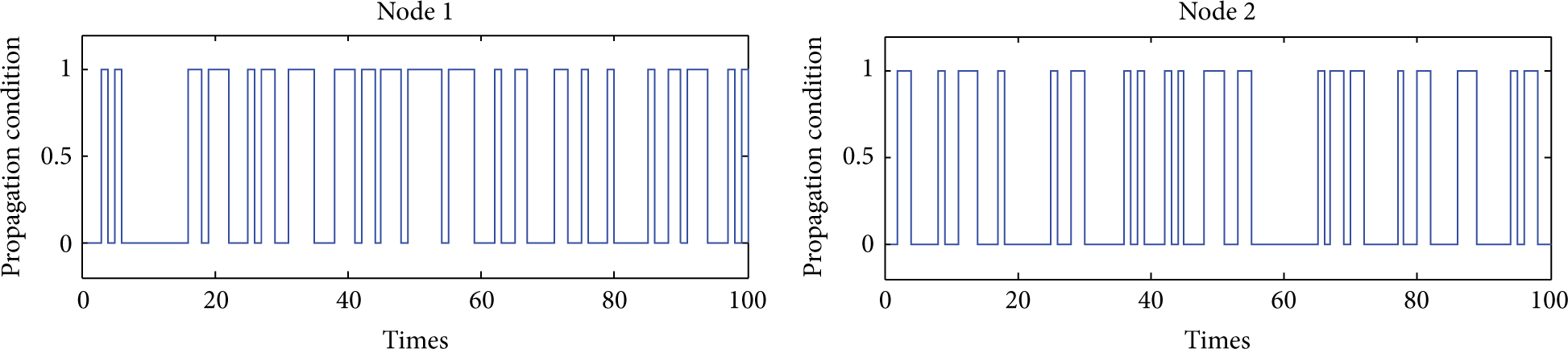
The propagation condition for beacon nodes 1 and 2.
Figure 5 illustrates the identification success rate under different parameters. Figures 5(a) and 5(b) show the success rate decreases with the mean and standard deviation of NLOS error increase. The success rate is greater than 90% with the variation of parameters. In Figures 5(c) and 5(b), we can see that the larger or smaller standard deviation of shadowing effect (
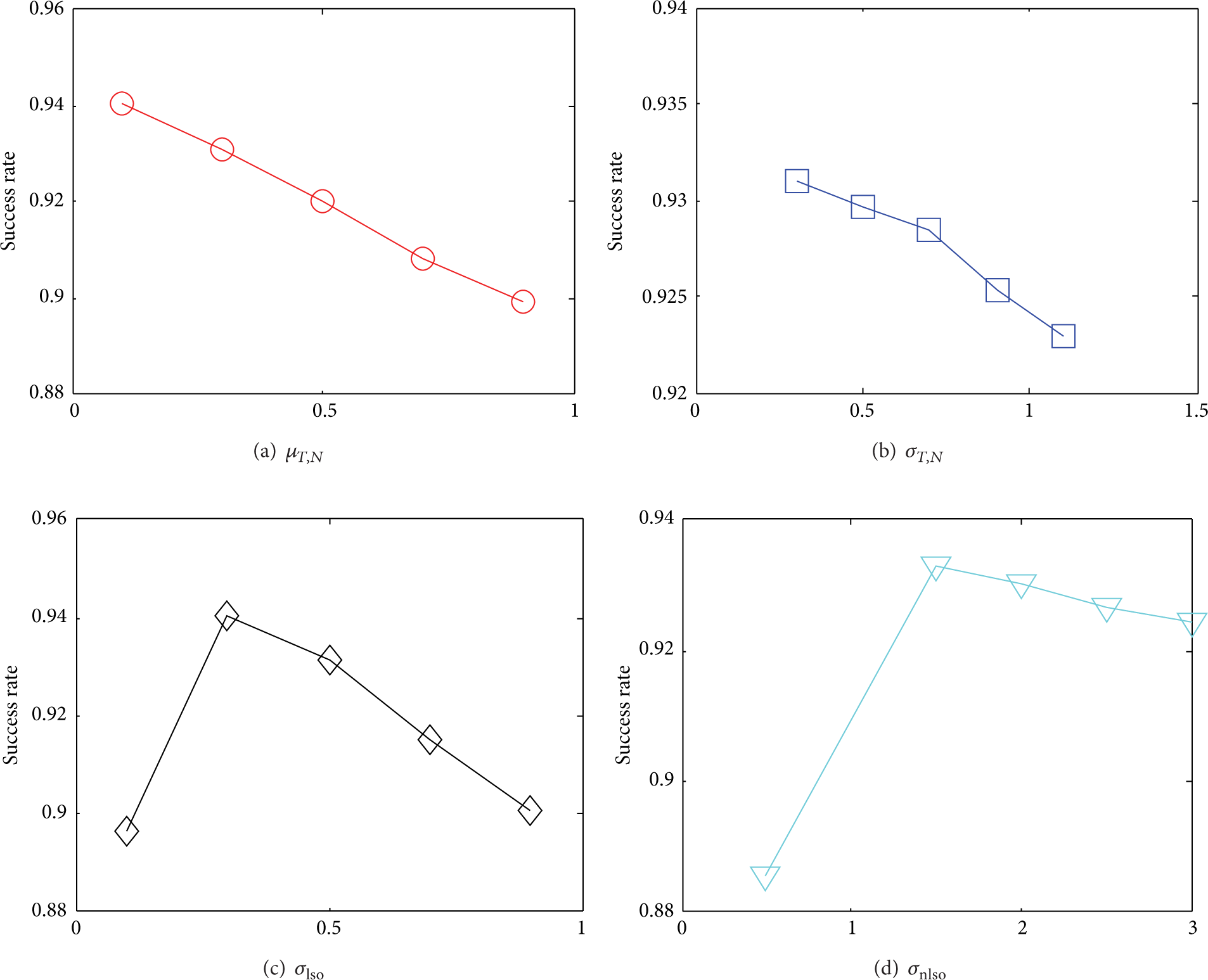
The identification success rate under different parameters.
Figure 6(a) shows the localization results of the proposed method in one experiment. It can be observed that the proposed method could localize the mobile node accuracy in low-density beacon node environment. Figure 6(b) illustrates the localization error in each time index for the three methods. In comparison with other methods, the proposed method owns the lowest localization error in most time indexes. The average localization errors of proposed method, Kalman filter, and
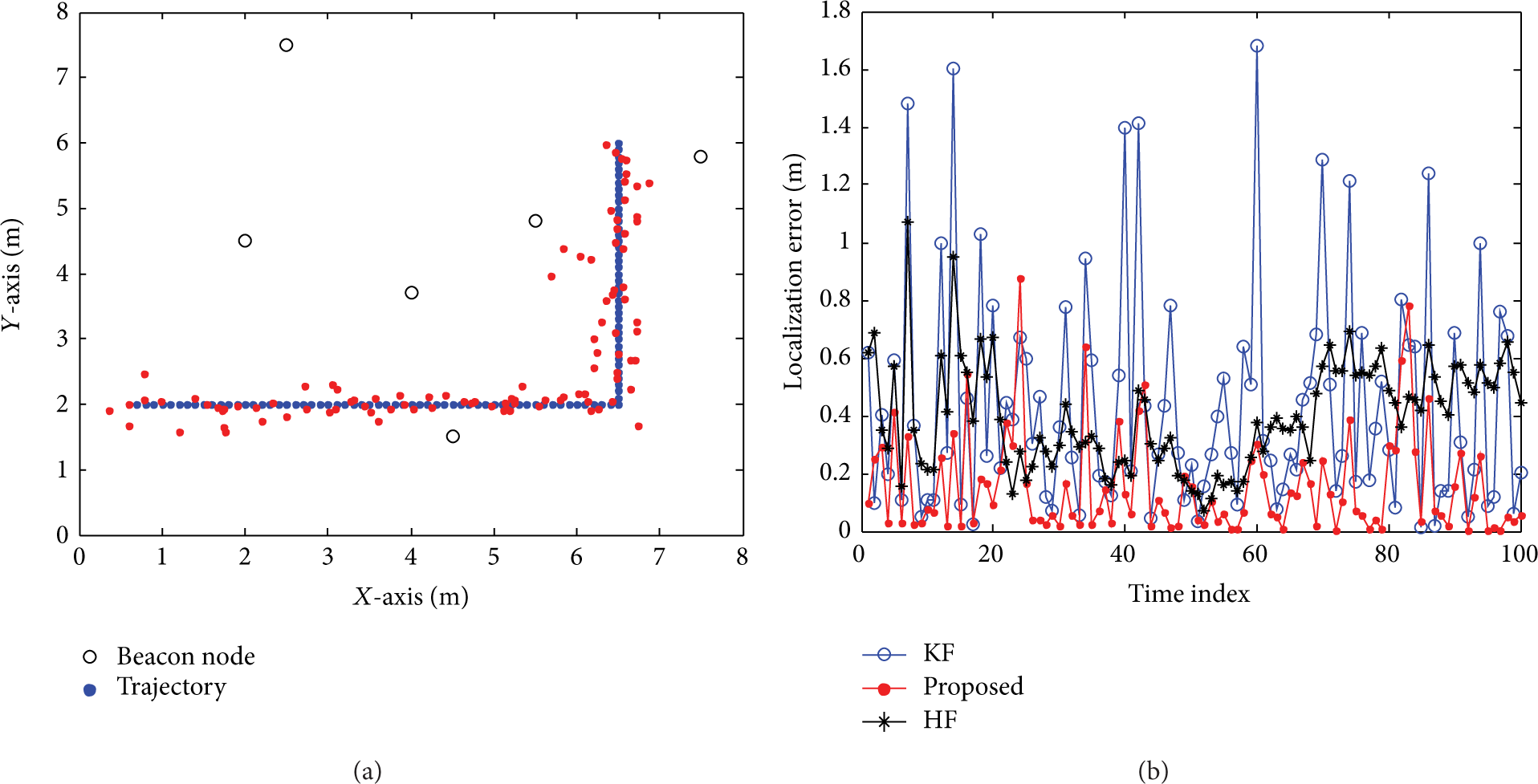
(a) The localization results for the proposed method. (b) The localization error versus time index.
Figure 7 evaluates the performance with varying the mean of TDOA NLOS errors. The mean error increases as the mean value increases. It indicates that the proposed method has better performance than the KF and HF methods under different parameter values. The greater the mean value, the greater the performance improvement.
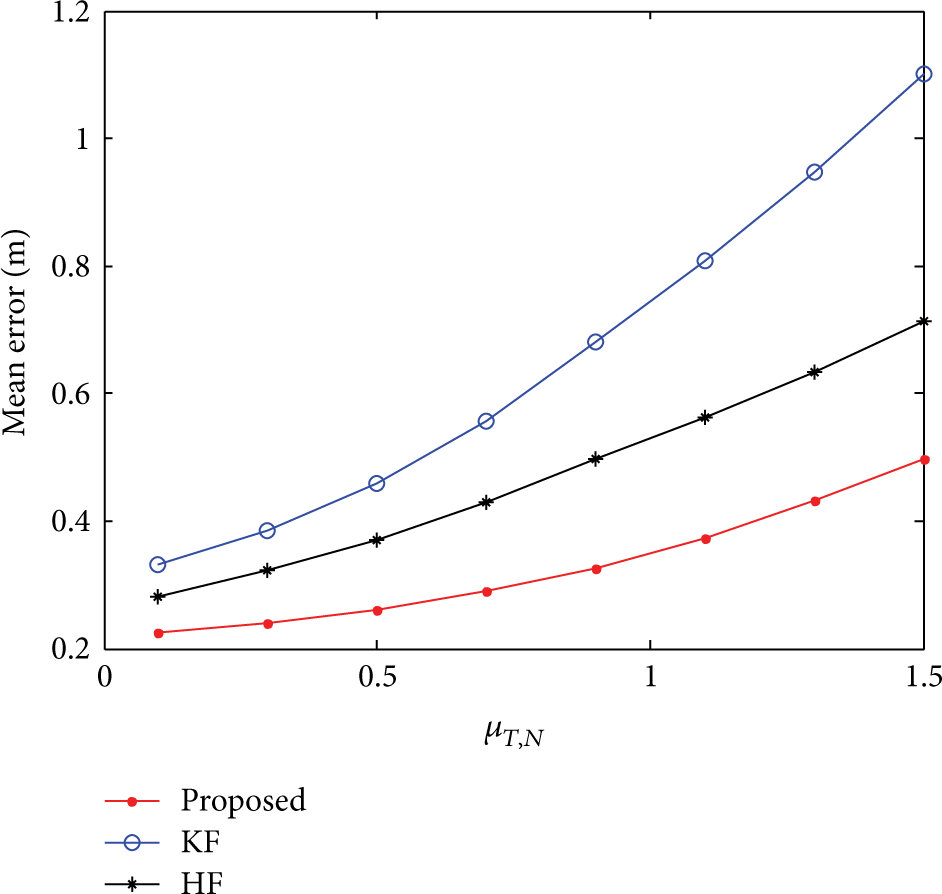
The mean error versus mean of TDOA NLOS errors.
In Figure 8, we evaluate the impact of the standard deviation of TDOA NLOS errors on the mean error. When
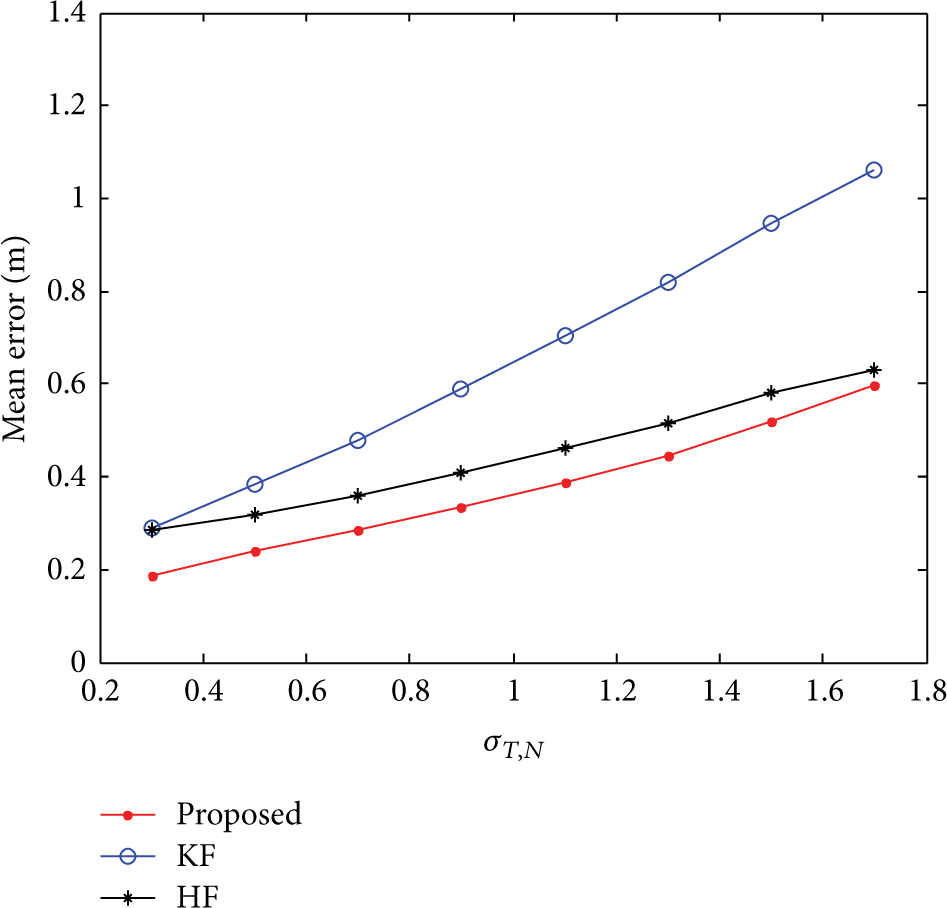
The mean error versus standard deviation of TDOA NLOS errors.
6. Conclusions
In this paper, an accurate mobile localization method has been proposed for wireless sensor network in mixed LOS/NLOS environment using TDOA and RSS measurements. This paper firstly adopts the general likelihood ratio method to identify the propagation condition in Kalman framework. Based on identified condition, the modified VB-AKF method is used to filter the NLOS error in NLOS condition and the classical Kalman update is used in LOS condition. Finally the maximum likelihood method is used to estimate the position of mobile node. Compared with Kalman filter and
Footnotes
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Acknowledgment
This work was supported in part by National Natural Science Foundation of China under Grant nos. 61273078 and 61203216.