
Abstract
Indoor localization is used in many applications like security, healthcare, location based services, and social networking. Fingerprinting-based methods are widely used for indoor localization. But received signal strength (RSS) variation due to device diversity and change of conditions in the localization environment (e.g., distribution of furniture, people presence and movement, and opening and closing of doors) induce a significant localization error. To overcome this, we propose a hybrid indoor localization system using radio frequency (RF) and pyroelectric infrared (PIR) sensors. Our localization system has two stages. In the first stage, the zone of the target person is identified by PIR sensors. In the second stage, we apply K-nearest neighbor (K-NN) algorithm to the fingerprints within the zone identified and estimate position. Zone based processing of fingerprints will exclude deviated fingerprints because of RSS variation. We proposed two localization methods: Proposed_1 and Proposed_2 which use signal strength difference (SSD) and RSS, respectively. Simulation results show that the 0.8-meter accuracy of Proposed_1 achieves 84% and Proposed_2 achieves 65%, while traditional fingerprinting and SSD are 46% and 28%, respectively.
1. Introduction
Localization is an important technology for pervasive computing. Global positioning system (GPS) is advantageous in terms of positioning accuracy and reliability in outdoor environments. But GPS is not working properly in indoor environments due to lack of line of sight between the satellites and the receiver. Hence, infrared, RF, and ultrasound signals are commonly used in indoor localizations systems.
Indoor localization systems can be classified in two based on the need of a terminal that should be carried by the target person: terminal-based and nonterminal-based [1]. In terminal-based systems, the location of the target person is determined indirectly from the location of the device carried by him/her. In these methods, it is impossible to locate a person if he/she does not carry a device, whereas, nonterminal-based methods determine location of a person who do not carry device. One technique in nonterminal-based methods is using PIR sensors [1, 2].
PIR sensors are very inexpensive sensors that detect the nearby presence of a warm body, for example, a human within its sensing region. When a PIR sensor detects an existence of a person within its detecting region, the center of this region is taken as the location of a person. This may result a maximum localization error equal to the radius of its detection region. And also, PIR sensor system localizations have disadvantage on multiple target identification.
RF-based localizations use RSS of packets sent by wireless devices available in the environment to perform localization. Specialized hardware is not needed to measure RSS, it can be directly measured from wireless card. Generally, RF-based localization systems can be classified in to two: propagation model based methods and fingerprinting-based methods [3]. Propagation model based methods use mathematical models to predict the distance between transmitter and receiver based on the power with which a packet sent by a transmitter reaches the receiver. From this information, it is possible to estimate the position of the receiver by geometric computations (e.g., trilateration). The major drawback of propagation model based methods is that the models used do not always hold in indoor environments due to phenomena like multipath fading and shadowing [4]. This has a significant effect on the accuracy of the localization system.
The second type of RF-based methods is fingerprinting-based methods which require two phases: online phase and offline phase [5]. During the offline phase, RSS values are collected from sample locations and stored in database. In the online phase, RSS vector at physical position of the target object is compared with the fingerprints in the database. Finally, position of the target is estimated based on the entries in the database that best matches the online RSS measurement. Fingerprinting-based methods provide a better accuracy than propagation model-based methods even though collecting fingerprints to create a database is time-consuming [3]. Although fingerprinting-based methods show a great promise for indoor localization, RSS variation due to device diversity [6–11] and change of conditions in the environment [12–14] induce a significant localization error.
In this study, we have proposed a hybrid (PIR sensors and RF) indoor localization system to overcome error induced in fingerprinting due RSS variation. Our system operation consists of two stages. First, the zone of the target person is identified by PIR sensors. Secondly, RF fingerprint values within the identified zone will be processed to estimate the final position of the person. Zone based processing of fingerprints will help us exclude deviated fingerprints because of device diversity or change of conditions in the environment.
The rest of the paper is organized as follows. In Section 2, we provide a brief discussion to related works. Section 3 presents problem definition. Section 4 describes our localization approach using PIR sensors and RF. Section 5 presents performance evaluation of our work and Section 6 concludes the paper.
2. Related Works
There are lots of researches done in indoor localization systems based on RF signals. A survey of wireless indoor positioning techniques has been presented in detail in [3, 4]. Various measuring principles and algorithms have been presented in [4]. It has been mentioned that the time based location methods are not suitable in nonline of sight (NLOS) conditions and RSS is referred in NLOS conditions. In [12], variation of received signal strength due environmental factors is discussed. This study considered the influence of temperature, height of node's position, type of antenna, and the electromagnetic influence of the human body on the RSS. According to their investigation, a human body at a distance of 5 meters can cause RSS fluctuation of −3.0
Fingerprinting-based methods which combine Wi-Fi with ZigBee or Bluetooth are proposed in [15, 16]. In such kind of combination, probability of signal interference is very high because of all the three technologies operate in the same frequency, 2.4 GHz. Results in [15] show that the combination of the three technologies perform weaker than when the Wi-Fi is combined with ZigBee or Bluetooth because of interference. In addition, the effect of device diversity, which is commonly encountered in Wi-Fi, is not addressed in [15]. A positioning scheme which aims at optimizing indoor fingerprinting systems is proposed in [17]. According to this scheme, indoor fingerprinting systems can be optimized based on the systems operating parameters such as the number of access points (Aps), the geometry of APs, arrangement of RPs, and the number of RSS samples.
In [18–20], Wi-Fi positioning is combined with pedestrian dead reckoning (PDR) systems. A combination of these complementary technologies overcomes the fluctuation of RSS-based Wi-Fi positioning due to the fluctuation of RSSs and the accumulation of error over time in PDR system. As WiFi signals vary significantly over time and are susceptible to human presence, multipath, and fading due to the high operating frequency, fingerprinting of FM signals is used in [14, 21]. Since FM signals vary less, localization accuracy is improved when FM and WiFi signals are combined to generate fingerprints. However, there are challenges when employing FM signals. The most crucial challenge is that FM signal does not carry any timing information, which is a critical factor in range calculation. Moreover, the accuracy of navigation using FM signals could be degraded, similarly to most radionavigation systems, by the effects of multipath especially for indoor areas [21].
An enhanced positioning trilateration algorithm for human body implant localization is proposed in [22]. The algorithm has two stages. In the first stage, three most suitable reference nodes are selected from all reference nodes within the range using optimization algorithm. In the second stage, position of a node whose location is unknown is estimated by means of adaptive geometric algorithm. The positioning environment of this algorithm, implants in a human body, is quite different from indoor or outdoor systems. Trilateration positioning schemes are more suitable than fingerprinting for positioning implants in human body, but fingerprinting methods provide better accuracy for indoor positioning [3].
RSS variation due to device heterogeneity occurs when a user's device and a system configured device are different [6]. Average RSS variation due to Wi-Fi devices heterogeneity may exceed 18 dBm [7]. Another experiment done in [8] supports this result. Different localization methods are proposed in the literatures to address this issue [6–11].
SSD uses the difference of signal strength as a location fingerprint [8]. It is a robust location fingerprint when heterogeneous devices are used. Although SSD address the issue of device heterogeneity very well, it has drawbacks. The first drawback of SSD is the effect of shadowing variation. If the shadowing variance is
Hyperbolic location fingerprinting (HLF) is proposed to overcome the device-diversity issue without manual calibration [9, 10]. Here, fingerprints are recorded as the RSS ratio between pairs of APs rather than as absolute RSS values. Rank based fingerprinting algorithm which uses rank of the APs based on RSS values is proposed in [11]. This algorithm is based on the assumption that the rank of a given AP will be less affected due to device change compared to measured RSS value. Performance comparison between the two calibration free techniques HLF and SSD is done in [23]. It is shown that the two techniques perform almost the same. Although the issue of device diversity is addressed in [6–11], the performance of these schemes suffers from RSS variation due to change of environmental conditions.
An indoor human/robot localization and monitoring system based on PIR sensors and RF is proposed in [2]. This method fuses the location information obtained from PIR and RF propagation model. From RF propagation model, position of the target is estimated and it is assumed to be distributed in some probable region. The authors use Cramer-Rao bound (CRB) to determine the probable region. The intersection region of the probable region (from CRB) and the sensing area of a PIR sensor that detects the target is the region in which the target is expected to be. Finally, the center of gravity for the intersection region is taken as the position of the target. Even though we use the same technology combination (RF and PIR sensors) as in [2], the issue we want to address is RSS variation in fingerprinting-based methods. We prefer fingerprinting than RF propagation model because fingerprinting-based methods provide better accuracy in indoor environments [3].
3. Problem Definition
Fingerprinting-based methods are widely used in indoor localization. These methods require two phases: online phase and offline phase. During the offline phase, RSS values are collected from sample locations and stored in database. In the online phase, RSS vector at physical position of the target object is compared with the fingerprints in the database. Position of the target is estimated based on the entries in the database that best matches the online RSS measurement.
Since fingerprinting-based methods require two stages, the accuracy of these methods is significantly affected by RSS variation; that is, RSS vectors collected during the online phase are different from those collected during the offline phase even though the positions of the transmitter and receiver remains the same. This RSS variation is caused by device diversity [9, 10] and change of conditions in the environment (e.g., distribution of furniture, people presence and movement, and opening and closing of doors) [5].
RSS variation due device diversity occurs when the device used in online phase is different from the device used in offline phase, [6]. Heterogeneous devices measure signal strength differently. In [7], an experiment is done to compare RSS of notebook and smartphone from the same location and at the same Wi-Fi AP. As shown from the results, the average RSS value from notebook is −47.6 dBm whereas from the smartphone is −66.2 dBm. A similar experiment done in [8] also supports this result. These experiments indicate that device heterogeneity has a serious impact on the accuracy of fingerprinting based systems and it can make room-size accuracy [9]. In addition to devices diversity, environment conditions like distribution of furniture, people presence and movement, and opening and closing of doors will not be the same in the two phases of fingerprinting. Hence, change of environmental conditions in the localization environment cause a considerable RSS variation [12, 13].
To overcome localization error induced due to RSS variation, we have proposed a hybrid indoor localization system based on PIR sensors and RF. Our system operation consists of two stages. First, the zone of the target person is identified by PIR sensors. Secondly, RF fingerprints within the identified zone will be processed to estimate the final position of the person. Zone based processing of fingerprints help us to exclude deviated fingerprints caused by device diversity or change of conditions in the environment.
4. Methodology
In this section, we provide a detailed description of the two stages of our localization system. The entire localization process is shown in Figure 1.
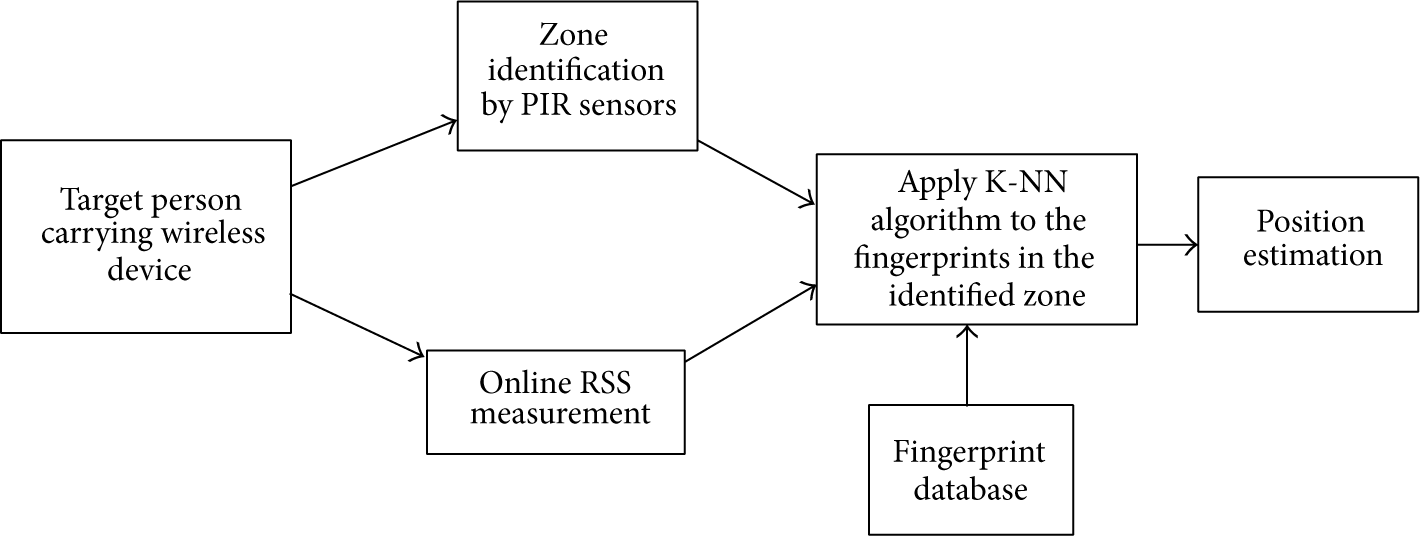
Localization process of our hybrid system.
4.1. Zone Identification by PIR Sensors
PIR sensors detect the electromagnetic radiations emitted by persons when they move through each sensor's field of view. A PIR sensor produces an ON signal when a person enters its sensing region and the center of this sensor is taken as the position the person. The output of a PIR sensor is characterized by the magnitude of the observed voltage. To capture RSS variation, we use a Bayesian classifier with Gaussian probability density function to classify the output voltage to in to three classes:

where

Three classes of PIR sensor voltage output.
We arranged four PIR sensors as indicated in Figure 3 and thirteen zones of different areas are created. For example, the five zones formed by PIR sensors A and B are

Zones formed by four PIR sensors A, B, C, and D.
After the output pattern of a PIR sensor is determined using a Bayesian classifier, the zone of the target person is estimated by processing multiple sensors’ report on the output pattern classification. When four PIR sensors are placed as in Figure 3, we will have four possible options to determine the zone of the person. The four options are as follows.
From the four PIR sensors, one sensor classify the observed voltage to be in
Only one sensor classify the output voltage to be in
Two sensors classify the output voltage to be in
If all PIR sensors classify the observed voltage to be in
4.2. RF Localization
This is the second stage of our localization system in which we apply K-NN [25] algorithm to the fingerprints which are in the zone identified by PIR sensors. Two fingerprinting databases were created during the offline phase: one with RSS and the other with SSD. We proposed two localization methods, which corresponds to the databases created. The first is Proposed_1 which uses the database created based on SSD and the second is Proposed_2 which uses the database created with RSS. The detailed description on the creation of the two databases is presented below. Log-normal shadowing model is used to measure RSS at a distance d from the transmitter, [26]. The received signal strength (in dBm) at distance d (in meter) from the transmitter (

where
The received signal strength at the reference distance

where
The database created with RSS has the form
Database structure.
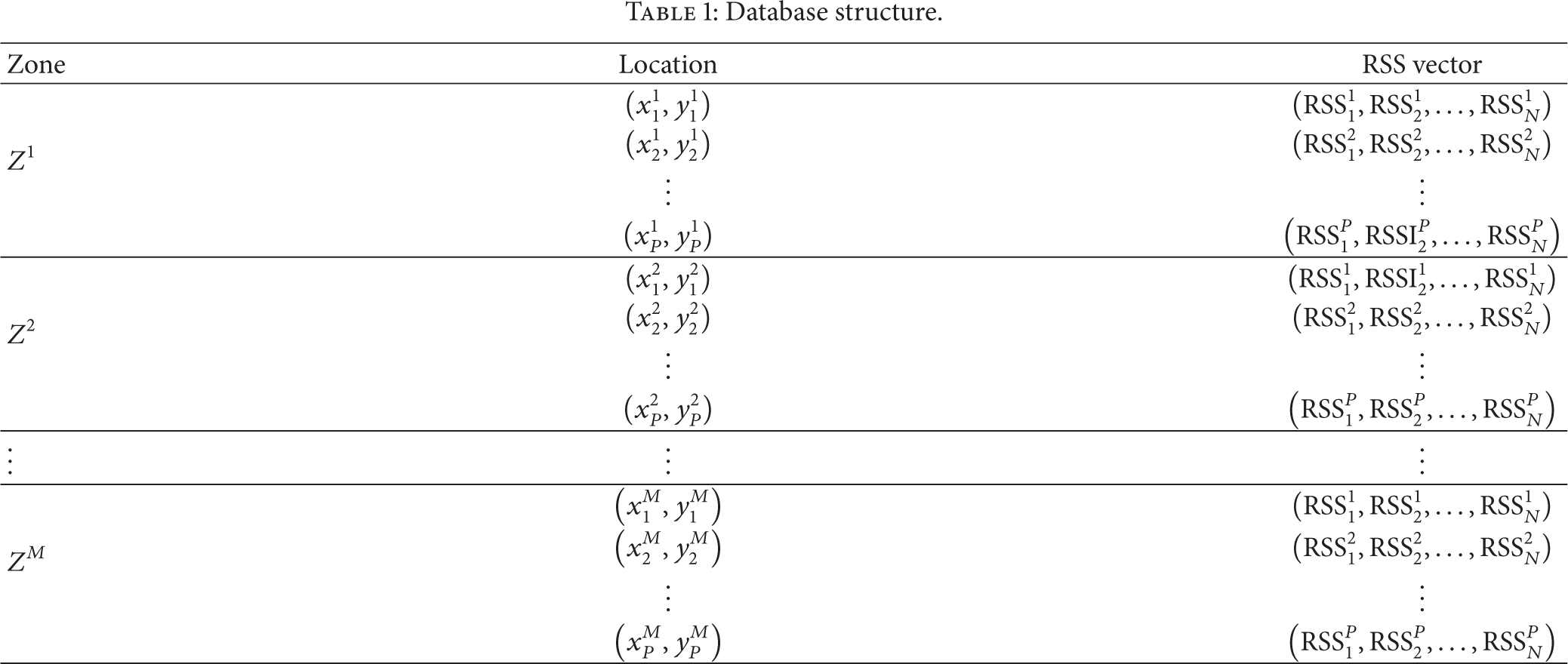
From (2), the two terms which will bring RSS variation at a fixed distance d are
To address the issue of device diversity in fingerprinting-based methods, creating fingerprint database using signal strength difference (SSD) is promising than absolute received signal strength. We proposed the idea of signal strength difference for mobile location in [27] and this idea has been recently used for indoor localization in [8]. SSD uses the difference of signal strengths received at the AP's as a location fingerprint, (6). To describe SSD, let the transmitters be wireless APs with the same


Subtracting (4) from (5), we get
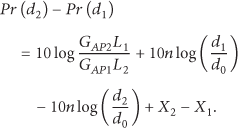
As shown in (6), SSD is free from the receiver's hardware specific parameter
The database created with SSD has the form
In the online phase, we apply K-NN algorithm to the fingerprints which are inside the zone identified at the first stage by PIR sensors. The K-NN algorithm is used to choose K closer locations to the tested point. The closeness metric is a distance measurement in signal space. We calculate mean of the K closer locations and take it as the estimated position of the test point.
5. Performance Evaluation
In this section, we discuss the performance of the proposed localization methods. We used C++ to conduct simulations. Our proposed methods, Proposed_1 and Proposed_2, are compared with SSD [8] and traditional fingerprinting methods [5].
5.1. Simulation Environment
We consider a square localization field of 15 m × 15 m area. Four AP's (at each corner) and four PIR sensors (at the center of the circles) are placed in the field as shown in Figure 4. The localization field is divided in to square grids of size 0.6 m × 0.6 m and RF fingerprint are collected at the center of each grid. A total of 625 fingerprints (training points) are collected. For RSS measurement, we adopt the log-normal shadowing model [26], (7). In this model, the received power (in dBm) at a distance d (in meter) from the transmitter

where
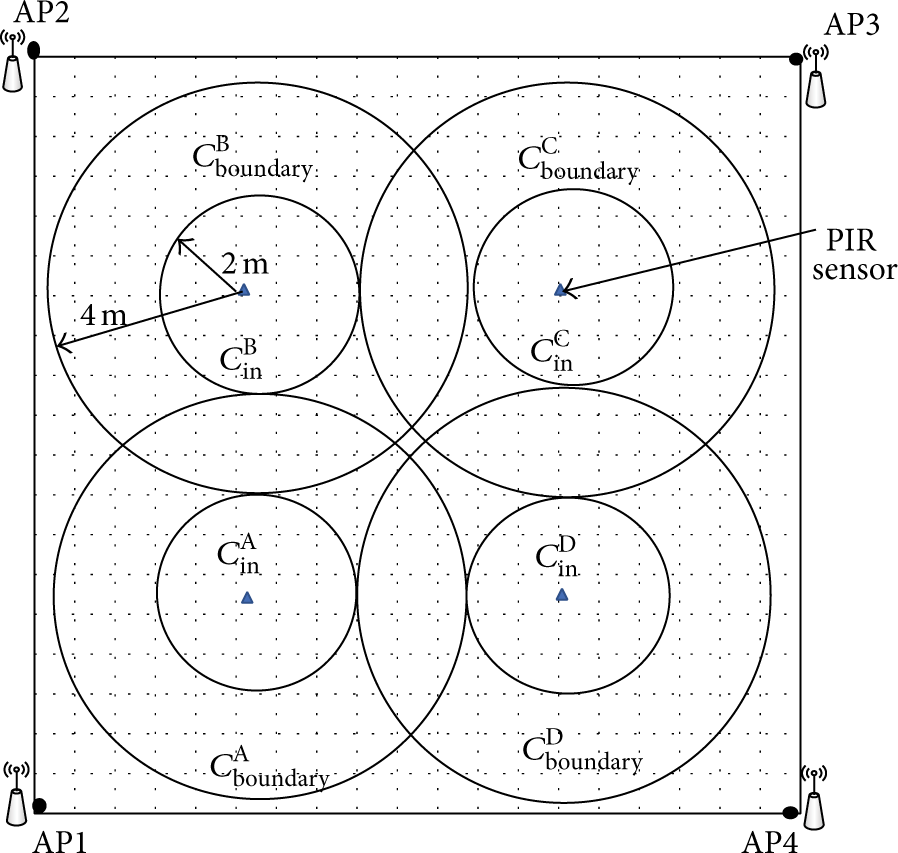
Simulation environment.
We assume the transmitters to be the four AP's and have the same hardware specification
Simulation parameters.
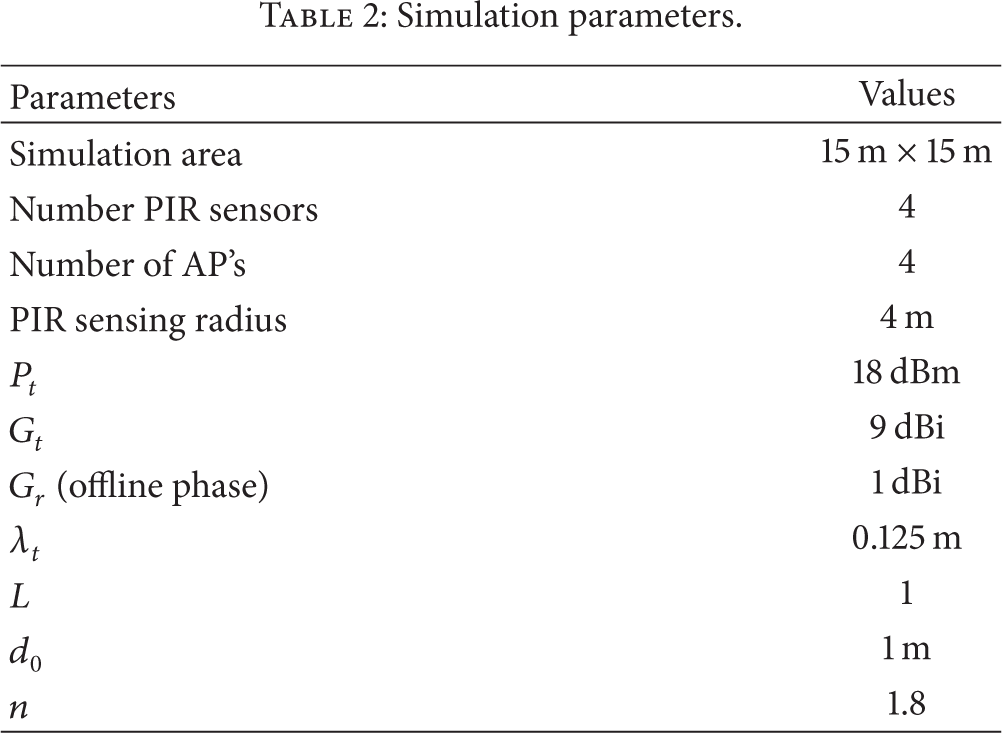
For PIR sensors voltage output, we generate a random number with Gaussian distribution of mean
A total of 200 test points are selected from the inside and boundary areas of the four PIR sensors. We tried our best to make the test points distributed uniformly in the boundary and inside areas of PIR sensors. We did not include test points from the outside area of PIR sensors because arrangement of multiple PIR sensors as in Figure 4 will leave a negligible uncovered area by the sensors.
5.2. Results and Discussion
In order to evaluate the performance our schemes, we compared our proposed schemes (Proposed_1 and Proposed_2) with SSD [8] and fingerprinting (traditional fingerprinting) [2]. We created two fingerprinting databases: one with RSS and the other with signal strength difference. Proposed_1 and SSD schemes use the database created with SSD, while Proposed_2 and fingerprinting use the database crated with RSS. For both of our proposed schemes, one column is added in the database to indicate zone of the fingerprint. A detailed description for databases is given in Section 4.2.
We considered localization error to investigate the performance the schemes. Localization error, e, is given by

where
Figure 5(a) shows the cumulative distribution function of location error when the devices used in online phase and offline phase are different and the standard deviation for shadowing

Cumulative distribution of error for Proposed_1, Proposed_2, SSD, and fingerprinting; (a) different devices and
When the shadowing standard deviation is decreased to 2 dB, the 0.8-meter accuracy of Proposed_1 achieves 97%, SSD achieves 94%, Proposed_2 achieves 72%, and fingerprinting achieves 66%, Figure 5(b). The performance of all schemes increases as shadowing standard deviation decreases from 3 dB to 2 dB. A decrease of shadowing standard deviation with 1 dB increase the performance of SSD scheme by 66%, but the performance increase of the other schemes is much less than this value. This indicates that SSD scheme is highly affected by shadowing among the four schemes, whereas Proposed_1 selects K-nearest fingerprints which are within the zone of the test point and excludes outlier fingerprints induced due to shadowing. The combined effect of shadowing and device diversity makes fingerprinting scheme perform worst among the four localization schemes.
Even though the real environment is not absolutely free from shadowing, we took an assumption as there is no shadowing and compare the above four schemes, Figure 5(c). Here, RSS variation comes from only device diversity. In this case, SSD outperforms all other schemes followed by Proposed_1. SSD outperforms Proposed_1 because the proposed method always select fingerprints which are within the zone of the test point and excludes fingerprints which are in a different zone even the fingerprints are closer to the test point. Such kind of excluding fingerprints increase localization error in Proposed_1 scheme when the test point is closer to the boundary of the zone. But in SSD, fingerprints which are closer to the test point are selected without considering zone of the fingerprints. However, as the real world is not free from shadowing, excluding such kind of fingerprints when the test point closer boundary of zone has less effect as compared to the effect of shadowing and device diversity. Even though Proposed_2 and fingerprinting schemes use the same fingerprint database, Proposed_2 outperforms fingerprinting because the effect of RSS variation due to device diversity in fingerprinting scheme is higher than in Proposed_2.
Figure 5(d) indicates cumulative distribution of localization error when similar devices are used during offline phase (database creation) and online phase (testing phase). In this case, the cause of RSS variation is only shadowing. Since the shadowing variance of SSD (
To generalize, the real localization environment is not free from shadowing and devices are heterogeneous. SSD addresses the issue of device diversity in fingerprinting but the effect of shadowing in SSD is higher than the effect in traditional fingerprinting scheme. Our proposed schemes address the issue of RSS variation independent of the cause of RSS variation: device diversity, shadowing, or any other.
6. Conclusion
We have proposed a hybrid indoor human localization system based on RF and PIR sensors to address the issue of device diversity and shadowing in fingerprinting-based methods. Our system has two stages. In the first stage, the zone of the target person is identified by PIR sensors. In the second stage, we apply K-NN algorithm to the fingerprints within the identified to estimate the position of the person. The purpose of processing fingerprints based on zone is to exclude outlier fingerprints due to device diversity or shadowing. Simulation results show that our proposed schemes outperform SSD and fingerprinting schemes when there is device diversity and shadowing. When the shadowing standard deviation
Footnotes
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.