
Abstract
Distributed target tracking is a significant technique and is widely used in many applications. Combined with the interval analysis, box particle filtering (BPF) has been proposed to solve the problem of Bayesian filtering when the uncertainties in the measurements are intervals; that is, the measurements are interval-based vectors. This paper is targeted for extending the existing BPF based on a single sensor to a distributed sensor network. We propose a distributed BPF (d-BPF) that each sensor communicates with its direct neighbors to collaboratively estimate the states of the target. The feasibility of the proposed distributed BPF is justified, and some numerical simulations are presented to show its effectiveness in target tracking.
1. Introduction
Target tracking is a prevalent task in many scenarios, such as navigation, military, and transportation. In the literature, various approaches have been proposed for target tracking [1, 2]. One of the most popular approaches is the Bayesian inference [3]. Within the Bayesian framework, the posterior probability density function (pdf) of the states of the target is calculated, conditioned on the available measurements obtained by sensors. Then, based on the obtained posterior pdf, the states of the target can be estimated, correspondingly.
Reviewing the related works of target tracking based on Bayesian inference, the Kalman filter (KF) [4–6] is a classical approach. However, in the presence of the nonlinearities and non-Gaussian uncertainties, the KF becomes inefficient. To tackle this problem, extended trackers such as the extended Kalman filter (EKF) [7] and the unscented Kalman filter (UKF) [8] have been developed. Although these extended trackers can handle some nonlinear cases, they become ineffective when the high-variance measurements and state noise combined with nonlinearities exist [9]. The particle filter (PF), which represents the posterior pdf of the states by sampling, shows outstanding performance, especially for nonlinear and/or non-Gaussian cases [3]. However, the efficiency and accuracy of the PF largely depend on the number of the particles. In the case where a large number of particles are used, the computational complexity is quite high.
It is worth pointing out that all of the above-mentioned approaches can only deal with the point measurements represented by fixed vectors. However, for a large amount of target tracking problems, the uncertainties may lie in a certain region, and thus the measurements are intervals. To deal with such interval-based uncertainties, the box particle filtering (BPF) [10–12] based on the interval framework is proposed, which propagates a set of weighted boxes in a sequential way. Instead of using a large amount of point samples, much less weighted boxes are used to approximate the desired moments of the posterior pdfs.
On the other hand, distributed in-network target tracking, where a set of distributed sensors collaboratively estimate the states of target, has received much attention recently. Distributed tracking can achieve low energy consumption as well as high robustness and scalability. Owing to these merits, various distributed target tracking algorithms have been proposed, such as the distributed KF [13–15] and the distributed PF [16–19].
However, the above-distributed algorithms are only used for the cases where the system measurements are point-based vectors. Decentralized BPF that can handle interval-based uncertainties has not aroused much attention. Although a decentralized BPF algorithm using belief propagation (BP) like message-passing algorithm is proposed in [20], it is only focused on the context of target localization but not applied to target tracking. Considering this, a distributed BPF (d-BPF) algorithm is proposed in this paper, where only the one-hop data exchange and communication between sensors and their neighbors are used to collaboratively track the states of the target. Theoretical studies and numerical simulations are then performed to show the effectiveness of the proposed algorithm.
The rest of this paper is organized as follows. In Section 2, we review some basic knowledge related to BPF. In Section 3, we derive the d-BPF and analyze the feasibility of the d-BPF. The selection of the combination weights for cooperation is also introduced in the same section. Section 4 presents some simulation examples. Finally, some conclusion is drawn in Section 5.
2. Preliminaries
The traditional Bayesian estimation deals with the point measurements, while the BPF can cope with interval-based measurements. The key idea of the BPF is to replace a particle by a multidimensional interval in the state space [11]. Therefore, the derivation of BPF depends on the theory of interval framework. So, before introducing the BPF, we overview some basic knowledge of interval analysis, including interval arithmetic and inclusion function, as well as constraint satisfaction problems and contraction.
2.1. Interval arithmetic
A real interval


The interval intersection of two intervals

Interval arithmetic operations are also defined on

Some basic interval arithmetic operations are summarized in Table 1 [25]. An interval vector

Interval arithmetic operations.
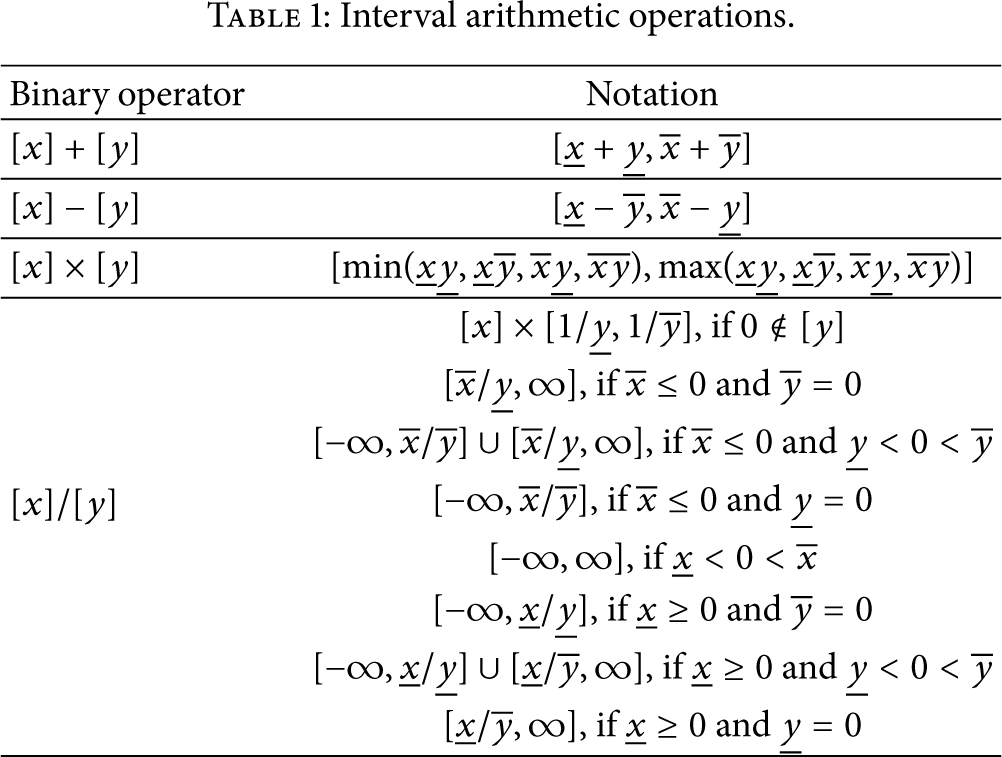
Similarly, interval arithmetic to boxes can be extended straightforwardly [25].
2.2. Inclusion Function
As mentioned above, in the BPF, each particle is replaced by a multidimensional interval in the state space. In order to keep consistency, it is necessary to guarantee that the result of interval operation is still an interval or an interval vector. Fortunately, an inclusion function can meet our need. To make it simple, assume 
An inclusion function may be very pessimistic. But the minimal inclusion function for
2.3. Constraint Satisfaction Problems and Contraction Methods
Consider variables 



Note that the set
3. Target Tracking with Distributed Box Particle Filtering
Assume that there are N static sensors and a moving target. These sensors are randomly distributed over a geometrical field with known positions and can periodically obtain measurements from the target. Our goal is to track the target in a distributed way so as to improve the tracking accuracy. We firstly derive the d-BPF algorithm and then give the Bayesian justification for it. Finally, some choices for the combination weight are given.
3.1. Distributed Box Particle Filtering
Consider the following state-space model:
In [10, 11], target tracking with a single sensor using BPF algorithm has been studied. Different from the PF, in the BPF, each particle is a box, which takes into account the imprecision caused by the model errors [11]. In this manner, the contraction step is similar to the variance matrix measurement update step of the Kalman filtering. Therefore, we follow a similar guideline of distributed Kalman filtering [26] to derive a distributed BPF algorithm for target tracking in a sensor network.
The d-BPF algorithm can be divided into five steps: initialization, time update and measurements broadcast, measurement update, estimation fusion, and resampling, where the second to the fourth steps are shown schematically in Figure 1.

The schematic process of the d-BPF algorithm.
(i) Initialization. At the beginning, the box particles in each node have to be initialized. Taking node k as an example, it can be initialized by M equally weighted and mutually disjoint boxes represented by
(ii) Time Update and Measurements Broadcast. Referring to Figure 1(a), each node obtains a set of predicted box particles according to the transition function locally and broadcasts measurements to its close neighbors simultaneously. Knowing a set of weighted box particles 
(iii) Measurement Update. As shown in Figure 1(b), after performing time update locally and broadcasting measurements to the neighbors, the weights of the predicted box particles in each node are then updated using the new available measurements from its neighbors (including itself) at time step 
Likelihood factors are calculated using innovation quantities, which reflects the proximity between the measured box and the predicted box measurement [11, 20]. The innovation is represented by the intersection between these two boxes, expressed as

Algorithm 1 (contraction in measurement update).
Consider the following.
Input
(
For Predicted measurement: Innovation: Contraction: If Return to step 1, replace
Endfor

Output
Based on the likelihood in (15), the update weights for each node k at time 
It is remarked that the box particles in each node are different after contraction, since the new available measurements are different in each node. So, it is improper to transmit weights to the neighbors as that performed in the distributed PF. Instead, here we let nodes only broadcast measurements to their closed neighbors in a distributed way and the box particles at each node are obtained based on the information in its neighborhood.
(iv) Estimation Fusion. In Figures 1(c) and 1(d), a combination step is applied and it attempts to achieve the new estimate 

(v) Resampling. The resampling is performed to introduce variety while preventing the degeneration of the box particles. Similar to the BPF algorithm with a single sensor [10, 11], the multinomial resampling combined with a subdivision step is applied, in which a box particle with high weight is divided by the corresponding number of smaller boxes, instead of obtaining the duplicated particles after the resampling step.
The d-BPF algorithm implements these steps in each time slot and a series of weighted box particles and the state estimation can be calculated sequentially in each node. To summarize, its implementation procedure is given in Algorithm 2.
Algorithm 2 (distributed box particle filtering).
Consider the following.
(1) Initialization. At each node k, set
(2) Time Update and Measurements Broadcast. Assume we have a set of weighted box particles
Calculate the predicted weighted box particles through the transition function in each node locally
(3) Measurement Update
Contraction. Use Algorithm 1 to obtain a set of weighted box particles
Likelihood. Consider

Weight Update. Consider
Weight Normalization. Consider
Local State Estimate. Consider
(4) Estimation Fusion. Consider
(5) Resampling. Combine subdivision method for resampling to create M new box particles with the same weights.
(6) Set
3.2. Distributed Box Particle Filtering Analysis within Bayesian Framework
In this section, similar to the proof of BPF [10, 11], we present the Bayesian justification for d-BPF algorithm. To simplify the representation, we denote the set of all the states and measurements obtained until time t by
Within the framework of Bayesian inference, the posterior pdf of the state vector 

Let a set of box particles be represented by a mixture of uniform pdfs. Comparing with the Gaussian mixture pdf, the uniform pdf is not only simple, but also owns a remarkable adaptation ability to strong nonlinear cases. Based on the interval analysis and by choosing box supports, d-BPF can propagate pdfs through linear, nonlinear, and even differential functions. More specifically, since the particles in the d-BPF algorithm are boxes and with the help of the interval analysis, the box particles can propagate sequentially with the uniform pdf.
Referring to [11], the uniform pdf sum representation of 
Now we can deduce the Bayesian expression of the d-BPF algorithm. Assume that a set of weighted box particles 
Then, the time update step at each node is carried out locally. Taking node k as an example, according to (32), the pdf of the states can be predicted by

Referring to [11], we can derive

Based on (36), (35) can be rewritten as
In the measurement update step, each node spreads its observations to its neighbors. When nodes receive information from their neighbors, the measurement update step can be implemented. Consequently, according to (31), the posterior pdf of the states can be computed by
Referring to Algorithm 2, the measurement update step consists of two main steps, that is, contraction and weight update. The former is used to contract a set of new box particles and the latter is used to calculate updated weights. Once a set of new weighted box particles is obtained, the estimation can be calculated naturally. We first focus on the contraction step. Since the measurements are intervals, the measurement likelihood function 


Note that the result of
After contraction, the corresponding weights can be calculated according to (16). Finally, the posterior pdf at time 
Remark 3.
It is also remarked that the d-BPF is superior to the noncooperation BPF (Nc-BPF). On the one hand, it can be seen from (42) that the contraction uses the measurements to remove the inconsistent part of each box particle. As a result, combined with measurements of neighbors, the box particles after contraction in each node would have less or at least no more inconsistent part than those without cooperation; that is, the uncertainty of box particle is decreased. On the other hand, according to (16), in the d-BPF algorithm, we can deduce that the box particles with large consistent part have larger normalized weights while those with small consistent part acquire smaller normalized weights, comparing with those in a noncooperation algorithm. As a conclusion, a better set of normalized weights of the box particles can be obtained than that without cooperation and thus the estimate outperforms the noncooperation one.
3.3. Selection of Combination Weight
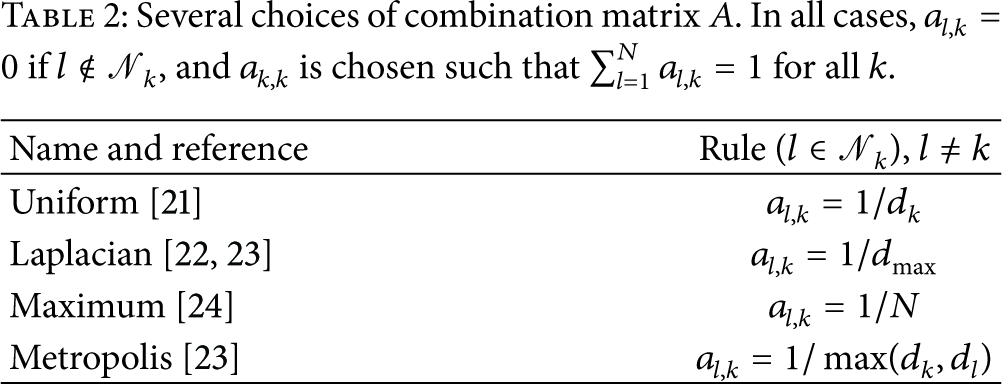
The entities of combination matrix A represent the weights used to combine the estimates of the neighbors. Some popular choices in the context of graph theory, average consensus, and diffusion adaptive networks are summarized in Table 2, where
Several choices of combination matrix A. In all cases,
Moreover, considering that the sensors are usually adopted with mobility, a dynamic network topology is also considered. To model this, we assume that the links and nodes are random entities for simplicity. That is, at every time instant t, the undirected random link weight 
Remark 4.
Note that when the sensor network is fully connected, the combination matrix selected by the Metroplis rule becomes
4. Simulation
In this section, we perform two examples of target tracking using the d-BPF algorithm proposed in Section 3. In these two examples, we consider the target tracking in a 2D plane. Assume there are
4.1. Example 1
In the first example, we consider a linear and Gaussian system that can be expressed as

A nonlinear and Gaussian measurement function 

In the following, both the simulations on static network topology and dynamic network topology are represented, respectively.
4.1.1. Case 1: Static Network Topology
Firstly, we consider a fixed network topology as shown in Figure 2. The positions of these sensors are perfectly known and each sensor has the knowledge of the positions of its neighbors. The experiment is implemented using MATLAB and the so-called toolbox INTLAB [27]. The results are averaged over 

The sensor network with 50 nodes.
In this example, we use

Tracking trajectory using the d-BPF with
Figure 4 shows the averaged performance of the entire network over

Simulation results for Example 1. (a) Average position RMSE over the entire network as a function of time. (b) Average velocity RMSE over the entire network as a function of time.
The performance of the d-PF is largely dependent on the number of the particles. As shown in Figure 4, the d-BPF with only 32 box particles outperforms the d-PF with 300 particles. Although the accuracy of d-BPF is worse than the d-PF with 5000 particles, it takes much less computation time than the d-PF by using fewer box particles. It is also worth mentioning that, in order to make a comparison between d-BPF and d-PF algorithms, the noise we used in the simulation is Gaussian. It is a special case that we can use cumulative distribution function (cdf) to calculate weights so that the d-PF can deal with the interval measurements. This does not contradict with the aforementioned statement that the d-PF is in general unsuitable for the interval measurements, since the prior pdf of noise may be non-Gaussian or even unknown. However, the d-BPF can handle these cases very well. Therefore, it is where the d-BPF is expert.
4.1.2. Case 2: Dynamic Network Topology
In the second case, we simulate the d-BPF over a dynamic sensor network. In the simulation, the propagation model is also the constant velocity model defined in (45). The measurement model defined in (47) is used. We also use
Figures 5(a) and 5(b) show the average position RMSE and average velocity RMSE, respectively, using different link probabilities p over
Average position RMSE and velocity RMSE with different link probability p.


Simulation results for Case 2. (a) Average position RMSE over the entire network with different link probabilities p as a function of time. (b) Average velocity RMSE over the entire network with different link probabilities p as a function of time.
4.2. Example 2
In the second example, we consider the target tracking of a variable velocity model, expressed as

In the simulation, the same network as given in Figure 2 is used. The initialization and other parameters are set the same as those in Example 1. We also use
Figure 6 shows the tracking trajectory of the d-BPF of node

Tracking trajectory using the d-BPF with

Simulation results for Example 2. (a) Average position RMSE over the entire network as a function of time. (b) Average velocity RMSE over the entire network as a function of time.
5. Conclusion
In this paper, based on the traditional box particle filtering and distributed processing, we have proposed a distributed box particle filter for target tracking, namely, d-BPF, to handle the cases where the measurements are intervals-based vectors. The feasibility of the proposed d-BPF algorithm is justified. The simulations for tracking both constant and variable velocity models are carried out. From the simulation results, we find that the tracking performance of our proposed d-BPF is significantly superior to that of the Nc-BPF. Moreover, from the simulation results with a dynamic network topology, we find that the tracking performance is improved with the increasing of the link probability. It is close to the c-BPF when the link probability is much larger, while the communication cost is increased simultaneously. Therefore, in practice, we should make a balance between the tracking performance and its cost.
Footnotes
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Acknowledgment
This work was supported by the National Natural Science Foundation of China (Grants nos. 61171153 and 61471320).