
Abstract
With the development of space technology, asteroid exploration will become a hotspot in the deep space exploration field. Space flight trajectory has the following requirements: needing a long time, having many engineering constraints, having a large number of targets, and having a series of feasible solutions. So how to find the global optimum flight program is the core issue of the deep space exploration trajectory design. This paper proposes a novel method to design the optimal trajectory by differential evolution (DE) algorithm for asteroid exploration based on mixed coding. In our method, the celestial sequence and the time sequence are coded together into the chromosomes of DE and optimized them simultaneously. The chromosomes are designed to include four parts: the celestial sequence, the exploration type, the time sequence, and the return time. The algorithm can make full use of the characteristics of the high efficiency and global optimization ability of differential evolution and can also avoid the problem of high complexity of the branch-and-bound algorithm and the problem of nonglobal optimal solution of the greedy algorithm. The algorithm is adopted to solve the Fourth Contest of National Space Orbit Design in China, and the result shows that both the computational efficiency and the performance of the algorithm are superior.
1. Introduction
With the successful launch of a series of probes from the United States and European Space Agency, the asteroid exploration has become the hot topic of deep space exploration in the new century and the new direction of the future space development. Many significant questions such as the solar system origin can be answered by exploring the asteroids. And at the same time, the potential risk that the asteroids impact Earth can be avoided by the asteroid exploration [1].
In recent years, these asteroids have been explored in many countries. As early as in 1991 and 1993, the Galileo spacecraft, exploring Jupiter, had visited two asteroids, Gaspra and Ida [2]. It opened the prelude to exploring the asteroids. In February 1996, the United States successfully launched the first asteroid of exploring probe, NEAR spacecraft [3]. Then, for the comets, the “Stardust” and “Deep impact” missions were successfully implemented [4]. These missions show the actual feasibility of a highly sophisticated interplanetary mission with a first-class scientific target, at a reasonably low cost and spacecraft and operation complexity. In May 2003, the first Japanese asteroid probe Hayabusa implementing sample return mission was launched [5]. In March 2004, European Space Agency also launched its first comet probe, ROSETTA, which conducted a flyby of the asteroid Lutetia in July 2010 successfully [6]. It will arrive at comet in January 2014 and release the lander on the surface of the comet. In September 2007, the United States launched another probe, Dawn, to explore the Ceres and giant asteroids Vesta [7]. In March 2010, the Japanese asteroid explorer Hayabusa, which was launched on May 9, 2003, had returned to Earth and released a small capsule with the asteroid Itokawa into the reentry orbit [8]. In 2012, China published its asteroids exploration plan [9]. The successful implementation of these asteroids and comets exploring missions will give further impetus to the development of deep space exploring technology and research about asteroids and comets.
The asteroid exploration is greatly different from the traditional deep space exploration, in which the main goal is to explore the terrestrial planets such as Mars and Venus. These differences are only the main problems needed to consider and solve in asteroid exploration mission. Among these problems, these ones related with trajectory design are as follows [10]. The first one is how to select the exploration targets. The number of the asteroids is very large. The exploration targets must be selected with large scientific value, suitable size, exact orbit determination, and less fuel consumption. The second one is the exploration with multitask and multitarget. In order to get more scientific volume and save money, the asteroid exploration with multitask and multitarget has been increasingly concerned by the main space power in the world. For an asteroid exploration mission, the best way is to explore multiple target asteroids by flyby or rendezvous, which gives some new challenges for trajectory design. The last one is to use the electric propulsion. For its characteristics with light quality and high ratio, the electric propulsion engine will be increasingly used in future deep space exploration missions. However, the combination of multitask and multitarget exploration mission with electric propulsion also brings new challenges in the trajectory design for exploring asteroids. The method to design segment by segment and then patch the segments in together is difficult to ensure the optimal fuel consumption. Therefore, it is necessary to research the overall method to solve the multitask trajectory.
Recently, there are some researches about the optimization design for the transfer trajectory to explore the asteroid missions. Cui et al. proposed a complete set of approaches to selecting mission targets and designing the transfer trajectory by the multiple gravity assist strategy for exploring asteroid mission [11]. Qiao et al. designed the transfer trajectory for rendezvous with asteroid Ivar by means of Earth gravity assist with deep space maneuver technology [12]. Chen et al. studied the design and optimization of the trajectory from the Moon orbit to the near Earth asteroids using the spacecraft's residual fuel with the Particle Swarm Optimization algorithm [13]. Alemany and Braun analyzed the effectiveness of several design space pruning techniques used to reduce the overall number of possible asteroid combinations based on the 2nd Global Trajectory Optimization Competition (GTOC2) [14]. Ceriotti and Vasile formulated the complete automated design of a multiple gravity assist trajectory as an autonomous planning and scheduling problem and devised an optimization algorithm to explore the space of possible plans based on ant colony optimization and also applied the approach to automatic trajectory planning to the design of optimal transfer to Saturn and among the Galilean moons of Jupiter [15].
However, these methods usually solve the problem by two separate steps. The exploration targets are selected firstly and then the transfer trajectories are designed. Because the number of the total asteroid combinations is so large, the traditional method is not effective to solve the problem. In this paper, for the Fourth Contest of National Space Orbit Design in China (CNSOD4) as the background, the model of the contest to explore the small body in the solar system is adopted as the model of trajectory design. As a global optimization algorithm, the differential evolution algorithm (DE) is introduced to solve the problem. The paper proposes a novel method to design the optimal trajectory by differential evolution algorithm for asteroid exploration based on mixed coding. Different from the traditional approach to determine the celestial sequence firstly and then to optimize the launch windows and the time span, the exploration sequence and the encounter time were optimized simultaneously in our approach by the mixed coding, which avoids these problems such as the high time complexity in the branch and bound method and the nonglobal optimal solution in the greedy algorithm.
2. Problem Statements
The problem definition of CNSOD4 is similar to the Second Global Trajectory Optimization Competition (GTOC2), which posed a trajectory optimization problem of an “Asteroid Tour.” Similarly, in CNSOD4, the participants were required to design the best possible trajectory that would rendezvous with four group different asteroids. The purpose of the mission in CNSOD4 is to design and optimize the space trajectory to explore the minor bodies including asteroids and comets. The optimization objective is to maximize the overall mission income after finishing the exploration. The mission has four group different target objects needed to explore. The number of the candidate asteroids in CNSOD4 is 4479 and is far more than in GTOC2. The number of the possible asteroid combinations is very large. Furthermore, launch date, launch velocity, times of flight, and stay time at each asteroid were free design variables. The large number of possible asteroid combinations prohibited each and every one from being examined, and the multimodal nature of the design space with respect to the other design variables prohibited a simple gradient-based optimizer from being used for a single asteroid combination. In addition to the large size of the global optimization problem, each local trajectory optimization required determining the best thrust profile to minimize propellant consumption.
The probe will be launched from Earth at any time during the period from January 1, 2015, to December 31, 2025, with a total flight time not to exceed 15 years (5478.75 days). There were four types of small bodies: near Earth asteroids, main belt asteroids, large asteroids, and comets. The numbers of small bodies for near Earth asteroids, main belt asteroids, large asteroids, and comets were 1750, 2065, 11, and 653, respectively. The type for exploration included rendezvous with/without devices, flyby, impact, and sample then return. The probe can use any planet as the gravity assist celestial body in the process. The minimum distance between the probe and Sun is not less than 0.2 AU at any time. When finishing the exploration mission, the residual mass of the probe is not less than 500 kg. The trajectory of the probe is only affected by the gravitational pull of Sun, not considering the gravitational pull of the planet and the small celestial body (except the gravity assist). There were different exploration incomes for every small body with different exploration type. The optimal objective is to maximize the total income in the given period. The income scoring system is given in Table 1.
The income scoring system.

Here, a, b, and c are the weighting coefficients. Their values depend on the stay time length on the asteroid or the impact velocity or the flyby velocity. These formulas (1) give the specific method to compute these coefficients a, b, and c:
There are three propulsion ways including chemical propulsion, electric propulsion, and their combination. The probe directly escaped the gravitational pull of Earth by the carrier rocket. The magnitude of the Earth escape velocity is relative with the initial mass and the escape velocity does not have to give the constraint on direction. For the combination of the escape velocity and the initial mass, there are four selections including (4500,1), (3500,2), (3000,3), and (2500,3.5). In our design, (4500,1) was selected as the parameters of the carrier rocket and the chemical propulsion as the propulsion way.
3. Optimization Algorithm Based on Mixing Code for Exploring the Asteroids
3.1. The Design and Optimization of the Two-Impulse Transfer Trajectory
As is shown in Figure 1, the transfer trajectory of the small celestial body under pure pulse mode is two-impulse transfer trajectory. Let
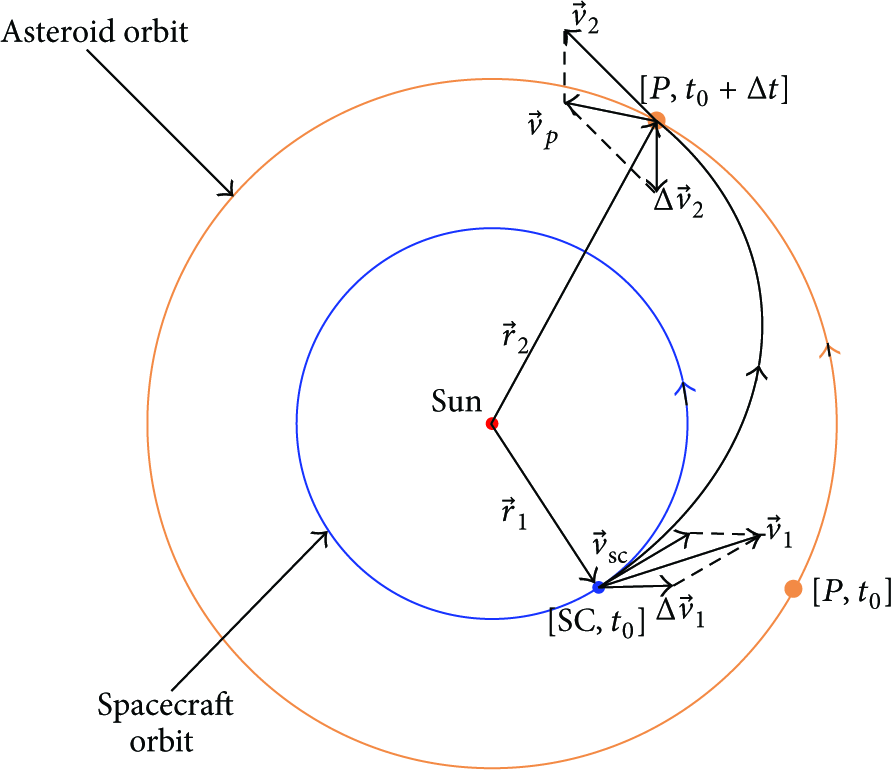
Double pulse transfer orbit.
If the initial time 


3.2. The Optimization of the Two-Impulse Transfer Trajectory
Based on the above analysis, the launch time
Differential evolution (DE) is a genetic algorithm based on the differences among the individuals in the populations, which was proposed by Rainer Storn and Kenneth Price in 1995 to solve the problem related to Chebyshev polynomials. The initial goal of the algorithm is to solve the global optimization problem, so the main idea of the algorithm is to use the differences among the individuals in the current population to generate the new populations and select the next generation individuals by the binary championship principle between the parent and child individuals. Based on the above strategy, the mutation operator will have good ability to search globally when DE is in the start stage of the iteration search process because the differences in the individuals among the population are very large. However, when DE is in the end stage of the iteration search process, the mutation operator will have good ability to search locally because the differences in the individuals among the population are very small and the population tends to be convergent.
DE is a genetic algorithm based on the float coding. For an optimization problem

Step 1 (initialization).
To generate M individuals in the n dimensional solution space by random function, consider the following:

Step 2 (mutation).
To select three individuals 
Step 3 (crossover).
The purpose of the crossover is to improve the diversity of the population. It can be operated as follows:

Step 4 (selection).
In order to decide whether the new individual 
3.3. The Trajectory Optimization Based on Mixing Code
The trajectory design to explore the small celestial body is a composite optimization problem.
The exploration sequence is a typical combinational optimization problem, while the trajectory design of two-impulse transfer is a function optimization problem. The common methods to solve the global optimal trajectory are the branch and bound method and the greedy method. In the two methods, the celestial sequence is first determined, and then the launch windows and the time span are optimized. However, all of the two methods have some limitations. When searching globally by the branch and bound method, there are many feasible exploration trajectories needed to be saved, which consumes a lot of time and space. Therefore, the algorithm complexity is very high by the branch and bound method. As for the greedy method, every step of the algorithm is based on the current optimum, which makes the solution not the global optimum. In order to solve the above problems, an optimization algorithm to explore the small celestial body is proposed based on the mixed coding in this paper. In the algorithm, the celestial sequence and the time sequence are coded together into the chromosome of the differential evolution and optimized simultaneously. The algorithm can make full use of the characteristics of the high efficiency and global optimization ability of differential evolution and can also avoid the problems in the branch and bound method and the greedy method.
In our method, the chromosome of CNSOD4 is designed to include four parts: the celestial sequence, the exploration type, the time sequence, and the return time.
The celestial sequence represents the exploration order of the small bodies. Because the coding for the whole chromosome is float data, the mapping between the part chromosome and the celestial sequence is implemented by rounding operation.
The exploration type represents which one is adopted to explore the small body among the four types for exploration. The mapping between the part chromosome and the exploration type is implemented by judging whether the corresponding asteroid can be explored in the four exploration types.
If the corresponding asteroid can be explored, the time sequence represents the launch windows and the time span of two-impulse transfer trajectory. In the part chromosome, the first data is the launch time, and the other data is the proportion that the corresponding time span for transfer trajectory accounts for in the whole exploration period. The mapping method can ensure the sum time for exploration does not exceed the given range.
The return time represents the time that the aircraft returns to the earth after having completed the exploration. Because the exploration for the small bodies involves the sampling exploration, the aircraft should return to the earth to implement sampling. This chromosome about the return time is designed for the special contest problem, and it can be different for the different designs.
The algorithm steps are described in detail as in Algorithm 1.
(1) Set up the length n of the coding (2) Set up the definition field (3) Set up the size (4) Set up the crossover probability CR and the scaling factor η (5) Initialize the population at random and set the current generation g = 0 (6) For all (7) Select three individuals (8) Generate a data (9) If r ≤ (10) Set e = 1 (11) Else (12) Set e = 0 (13) (14) If (15) (16) Else (17) (18) End for (19) g = g + 1 (20) If g ≤ (21) goto (6) (22) Else (23) End
4. Result and Analysis
In our differential evolution algorithm, the scaling factor η is set as 0.9, and the crossover probability
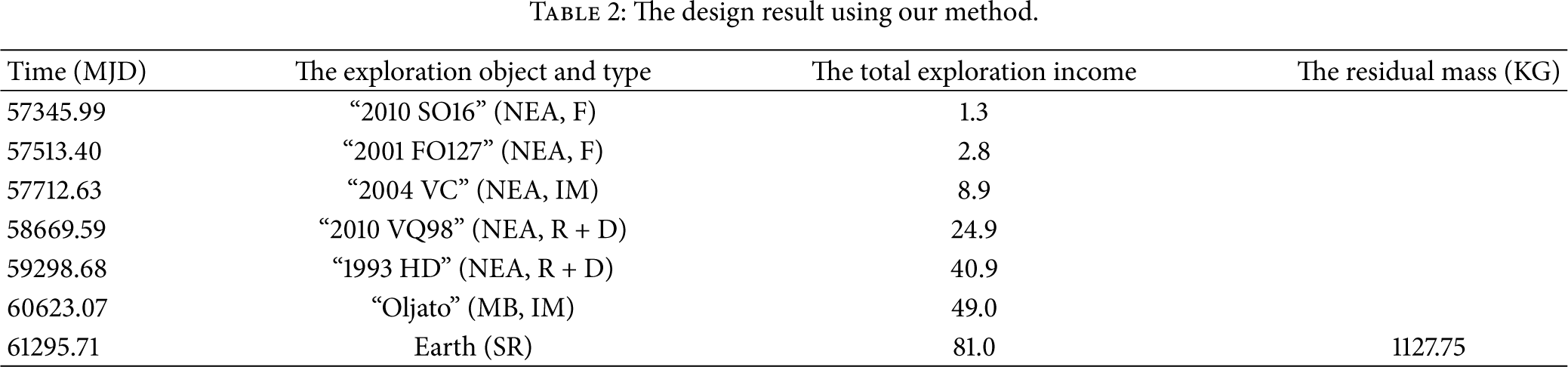
In our result, the probe will escape from Earth at 57044.66MJD, the total duration time is 11.64 years (4251.51 days), and the total score is 81. The detailed results are shown in Table 2. The rank among all teams of CNSOD4 is listed in Table 3.
The design result using our method.
Rank of CNSOD4.
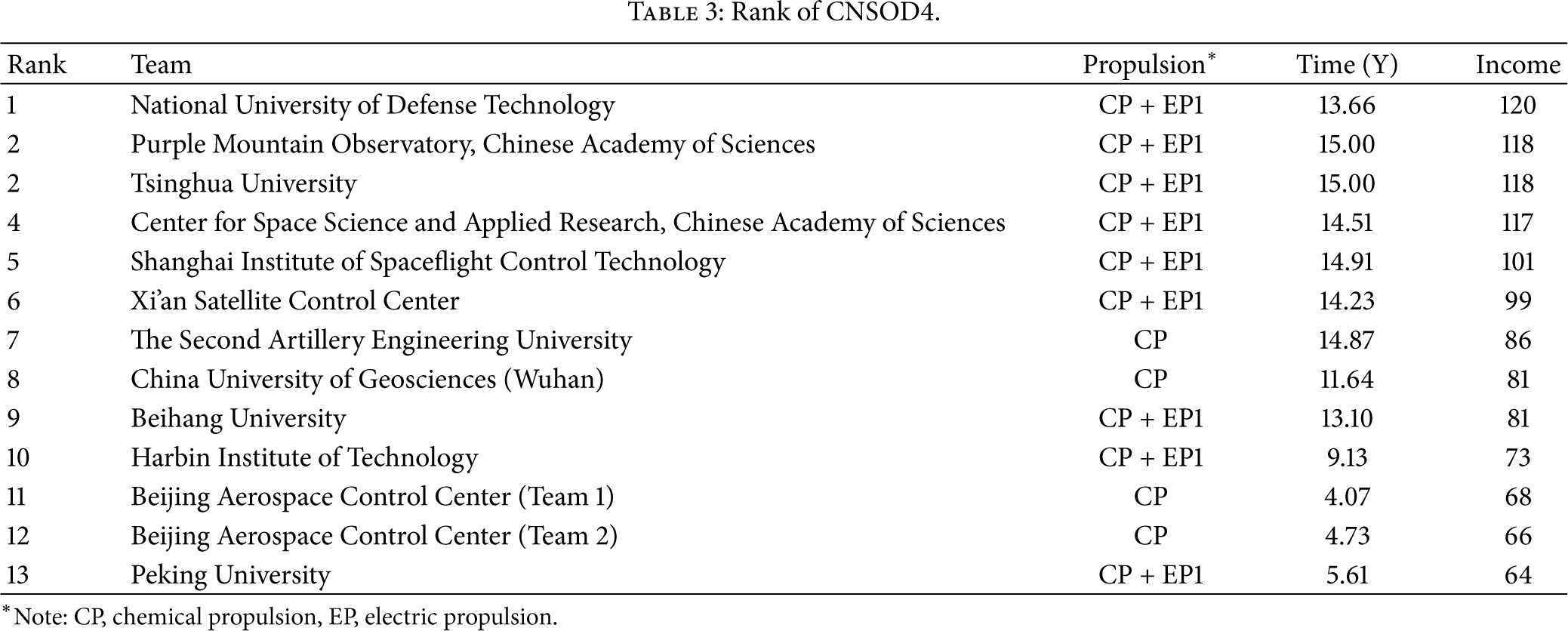
Figure 2 gives the three-dimensional simulation when the probe returns to Earth from the main belt asteroid Oljato. In the figure, the orbit of the asteroid Oljato, Earth, and the probe are drawn in different colors. The impulse point, the start point, and the end point are also given in different shapes.

The three-dimensional simulation when the probe returns to Earth from the main belt asteroid Oljato.
As is shown by the result, among all teams, our result ranked number 8. Particularly, it should be noted that our result ranked second in all teams which only uses the chemical propulsion. We also designed the exploration trajectory only by chemical propulsion using genetic algorithm, the result is shown in Table 4, and the three-dimensional simulation of the exploration trajectory is shown in Figure 3. The result shows the differential evolution algorithm based on mixed coding has the good performance to search the global optimum.
The design result using genetic algorithm.

The three-dimensional simulation of the exploration trajectory.
5. Conclusion
In order to optimize the celestial sequence and the time sequence simultaneously, a novel method is designed to optimize the trajectory by differential evolution algorithm for asteroids exploration based on the idea of mixed coding in this paper. In the method, the celestial sequence and the time sequence are coded together into the chromosome of DE, and the chromosome of DE is designed to include four parts: the celestial sequence, the exploration type, the time sequence, and the return time, which avoids optimizing the celestial sequence and the launch windows in two different steps. The idea is also used to solve the Fourth Contest of National Space Orbit Design in China. The result shows that the method has not only the good ability to search the global optimum, but also the high computational efficiency. It is clear that this idea is a feasible method to design and optimize the trajectory for exploring the small celestial body. However, it is also noted that our result still has a certain distance with the result of the first group in the contest. Therefore, how to improve the ability of the algorithm to search the global optimal solution is our further research focus.
Footnotes
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Acknowledgments
Maocai Wang is thankful for the Special Financial Grant from the China Postdoctoral Science Foundation (no. 2012T50681), the General Financial Grant from the China Postdoctoral Science Foundation (no. 2011M501260), the Grant from the Fundamental Research Funds for the Central Universities, China University of Geosciences (no. CUG120114), and the Grant from China Scholarship Council (no. 201206415018). Guangming Dai is thankful for the Grant from Natural Science Foundation of China (no. 61472375 and no. 60873107) and the 12th five-year preresearch project of civil aerospace in China. Lei Peng is thankful for the Grant from the Natural Science Foundation of China (no. 61103144).