
Abstract
In real-time multimedia application that is used to monitor the safety of workers and working environment in industrial fields, a burst of multimedia data, such as still images and audio or video streams, generated by multimedia nodes equipped with cameras or microphones on demand, is required to be collected at a server within a specified time bound in a reliable manner. However, due to the limited resources in sensor devices, such as process capability, bandwidth, and energy, it is challengeable to satisfy the time constraints of various real-time multimedia applications. Therefore, we introduce an optimized approach in order to shorten the acquisition period of bursty traffic so that it can satisfy more applications with tighter time constraints. For this purpose, we devise a path reservation scheme for an energy-efficient and time-constrained data transmission and a frame-slot scheduling scheme using two channels that enables the concurrent data transmission. Simulation results show that our proposed approach reduces the bursty data acquisition time and enhances network throughput significantly compared to other ones.
1. Introduction
Recently, the evolution of hardware technologies, such as tiny and inexpensive cameras and microphones, has enabled the application of wireless multimedia sensor networks (WMSNs) to several different areas (e.g., structure safety monitoring, industrial automation, military operation, and intelligent transportation systems). Among those applications, a safety monitoring and control system (SMOCS) can be used to monitor the working environment by collecting the data readings from the target environment periodically. If a server detects any dangerous sign by analyzing the periodic scalar data, it may need to confirm the situation by acquiring multimedia data such as still images or video streams from the multimedia nodes installed in some particular spots, since the results of scalar data may not always be reliable. In such a safety application, the multimedia data are usually required to be collected at the server within a specified time bound in a reliable manner. However, it is challengeable to satisfy the time constraint of the application since the number of multimedia nodes required to collect bursty data and the amount of data to be collected from each multimedia node can be varied depending on the situation and application.
In order to meet the requirements of a real-time application in WMSNs, the MAC protocol plays a very important role since it directly affects the reliability and timeliness of a data communication. In the literature, the previous works in MAC protocols can be divided into two groups: contention-based MAC protocols [1–3] and TDMA-based MAC protocols [4–6]. The contention-based approaches based on the CSMA technique are widely used in sensor networks because of their simplicity, flexibility, and robustness. Due to the energy constraint of a sensor node, most of contention-based MAC protocols for low duty-cycled applications try to reduce energy consumption, but increase packet latency as well. Moreover, they may suffer from low reliability of data transmission due to the interference or collision problem, especially in case of high density network. Thus, the contention-based MAC approaches may not be suitable for bursty data applications with high data-rate and tight time constraints. To overcome the problems of the contention-based approaches, some TDMA-based approaches have been proposed recently. In TreeMAC [4], a sensor node is allocated a number of dedicated slots according to how many descendants the node has. In I-MAC [5] which was proposed for tree-based topology networks, data slots are allocated to a node in the form of a sequence of receiving slots and then a sequence of sending slots. This way of slot assignment enables data packet aggregation and filtering. Due to not employing the slot reuse technique, the size of a superframe tends to be increased when tree size increases. RRMAC [6] tries to reduce end-to-end delay by assigning time slots in a sequence so that the packets flow continuously from the leaf-level nodes to the top-level nodes in a tree topology. WirelessHART [7] employs a frequency hopping technique in which a sensor node can switch randomly to one of predefined wireless channels in every assigned slot in order to improve the transmission reliability. However, this scheme becomes more complex, especially in dense networks. In summary, TDMA-based MAC protocols utilize distributed algorithms that schedule the channel access among nodes so that collisions are prevented before they can occur. However, most of TDMA-based approaches are designed based on the principal assumption that each sensor node only sends one data packet in every cycle; thus those approaches may not be suitable for burst data transmission with varied data rates. Moreover, the energy of a sensor node can be wasted significantly due to the unnecessary active state of a node during the period of bursty data transmission.
Some studies which deal with bursty traffic have been introduced recently. ATMA [8] tries to mitigate the unnecessary energy consumption in slot reservation by utilizing the natural characteristic of bursty traffic. In ATMA, a node that wants to transmit packets is required to send an advertisement message to obtain a time slot for its own transmission. However, it may suffer from high overhead and funneling problem in multihop networks. MMH-MAC [9] can support bursty traffic in dynamic networks. Because of utilizing the slot reuse technique, the irregular interference may affect the performance significantly. BurstMAC [10] which relies on the TDMA and multichannel mechanism is introduced to take care of bursty traffic in event-based applications. Therefore, BurstMAC is expected to enhance the network performance and prolong the network lifetime effectively. iQueue-MAC [11] is proposed to deal with bursty traffic by using a hybrid mechanism: CSMA/CA is used in light traffic load while TDMA is used in case of bursty traffic to provide better throughput with support of the multichannel technique. Op-LEACH [12] allows a node to utilize the unused slots of other nodes for its own bursty data transmission. However, it does not ensure the timely acquisition of bursty traffic. The approach in [13] deals with the transmission of bursty traffic in a duty-cycled underwater sensor network. By employing the dynamic duty cycling and multichannel technique, the idle listening and packet collision can be reduced significantly; thereby bursty data can be delivered more efficiently.
The aforementioned approaches are basically designed for the transmission of scalar traffic in normal situation and support bursty traffic in some special cases. Since the time constraint of data acquisition is not considered in protocol design appropriately, the high delay and energy consumption may occur. For that reason, [14] proposed an effective method for the delivery of bursty traffic in WMSNs. In this approach, a path from a multimedia node to a sink is set up and then the slot scheduling is performed to assign dedicated slots to the corresponding nodes for the delivery of bursty traffic. However, due to the possible irregular interference, it does not use a slot reuse technique. Therefore, if the load of bursty traffic is high, the application requirements of data quality and data acquisition time may not be satisfied.
Taking into consideration the requirements of multimedia applications in WMSNs and the problem of the existing approaches in support of bursty data acquisition, we propose an optimized method with the aim of delivering bursty traffic from sensor nodes to a server timely and reliably. To shorten the bursty data acquisition time and increase the network throughput, we employ a channel-slot allocation scheme in which a pair of
The rest of this work is organized as follows. The preliminary of this study is introduced in Section 2. In Section 3, we describe the design of our proposed approach in detail. Section 4 discusses the evaluation results. Finally, Section 5 gives the conclusions of this work.
2. Preliminary
2.1. Network Model
We consider a network model which is designed for the SMOCS as shown in Figure 1 [5]. However, in this work, the network model is slightly modified to better comply with our target application in WMSNs. Sensor nodes are classified into two types: ordinary node (ON) that is a sensor node attached to a scalar sensor module and multimedia node (MN) that is an ON integrated with a camera module. Usually, camera module is kept in sleep mode unless it is turned on by the server using a specific command. A multimedia node with active camera module is called an active multimedia node (AMN).
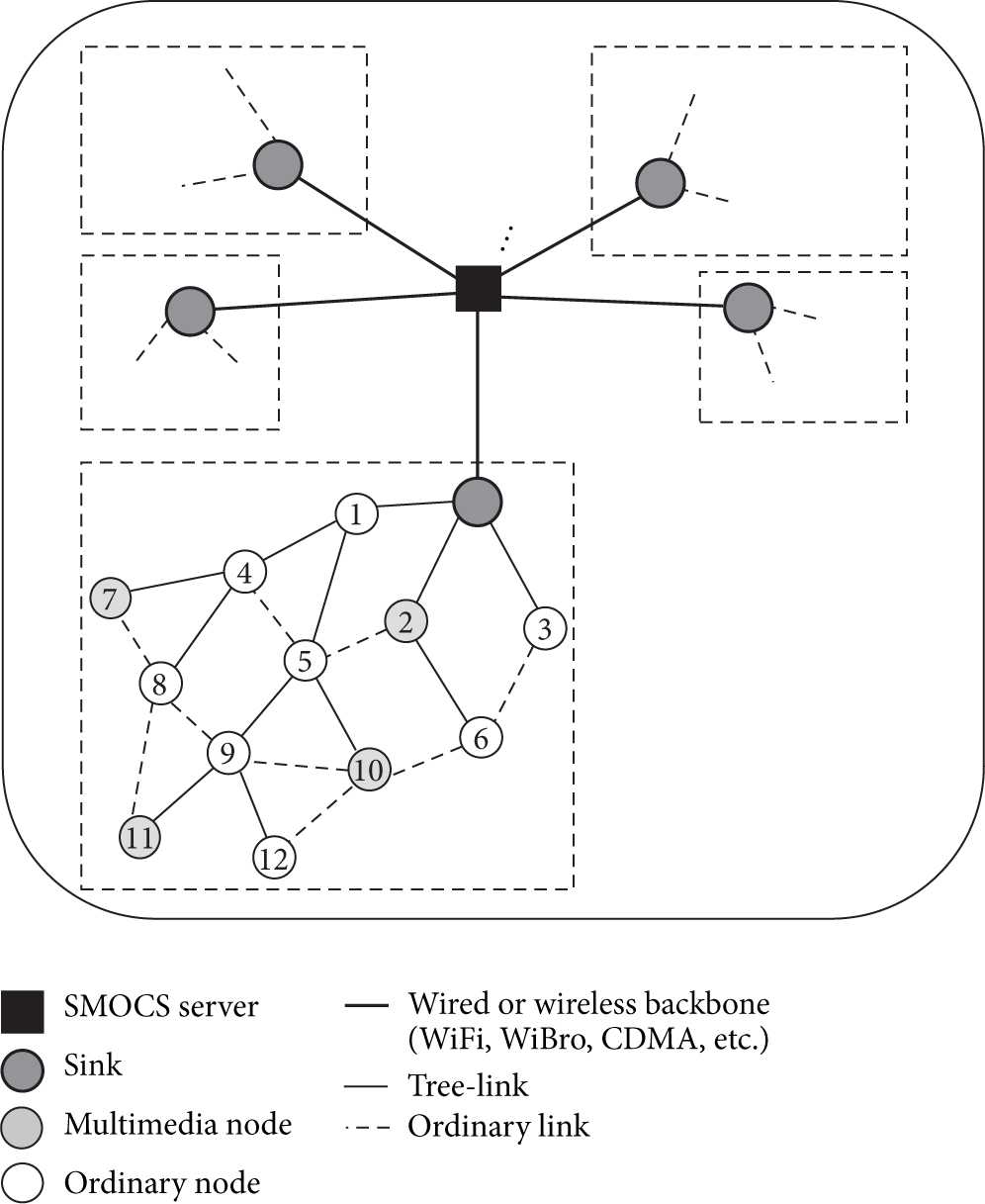
An illustration of the network model for SMOCS.
In ordinary operation, an ON sends readings of target environment to a sink periodically. Then the sink collects and analyzes the received data to examine the condition of the target environment. If any abnormal sign is perceived, the sink may request more information such as still images or video streams from a multimedia node where the event may happen to confirm the situation.
In this kind of network, a tree topology is built by all nodes rooted at a sink (or server), as shown in Figure 1. A wireless link is established between two nodes located in the communication ranges of each other. A link can be disrupted due to node failure, battery depletion, or the effect of hard industrial environment. If a node belongs to a specific tree, it is called as a tree-node. More specifically, a link between a sensor node and its child is called as a tree-link.
2.2. Problem Identification
In this study, we focus on designing an efficient approach to deal with the resource constraint of sensor devices (i.e., process capability, bandwidth, and energy) and network congestion that may occur in case of the acquisition of bursty traffic along with the delivery of periodic traffic in multimedia networks. For instance, in the SMOCS, an ON equipped with scalar sensor modules transmits the periodic data readings to a sink in a normal situation. However, in a critical situation (i.e., the sink detects an abnormal sign in the monitoring area), the sink may request more information (i.e., video streams or still images) to confirm the occurrence of the situation. Without a careful schedule for the transmission of periodic traffic and bursty traffic together, the network can easily suffer from high congestion and delay. Thus, the following principal challenges should be considered in designing a protocol for the acquisition of bursty traffic:
Although the existing TDMA-based approaches have shown the advantages in some applications, some challengeable issues have been raised when applying for bursty data applications as follows.
In this paper, we deal with the aforementioned issues by introducing two schemes:
2.3. Notations and Messages
The following notations and messages are used in the rest of the paper.
(a) Notations
(b) Messages
MDREQ = (mIDs(s)): multimedia data request message which is sent by a server to require data from multimedia nodes, PRREQ(i) = ( PRRES(i) = (mIDs
A
(i),
3. Protocol Design
3.1. Protocol Structure
Figure 2 shows the structure of the proposed approach that includes initial contention period (ICP) and specific MAC period. In the first period, time synchronization and tree construction are performed. There are two modes of the network operation: normal mode and bursty mode. During the interval of the specific MAC, a sensor node works in normal mode to send its periodic data readings to the sink. However, whenever critical situation is perceived, the sink starts the bursty data transmission period (BDTP) by sending a specific command to a particular multimedia node. A path reservation algorithm to reserve a dedicated path for bursty data transmission and a frame-slot scheduling algorithm to assign a number of frames (slots) for bursty data transmission are performed. Then, every node switches to bursty mode for sending or forwarding bursty traffic accordingly. Time in the BDTP is organized into frames, each having two data slots: one slot for sending data and the other for receiving data as illustrated in Figure 2. In this paper, we concentrate on the operation of bursty traffic acquisition only; thus the operation of the network in the normal mode is not discussed in detail.
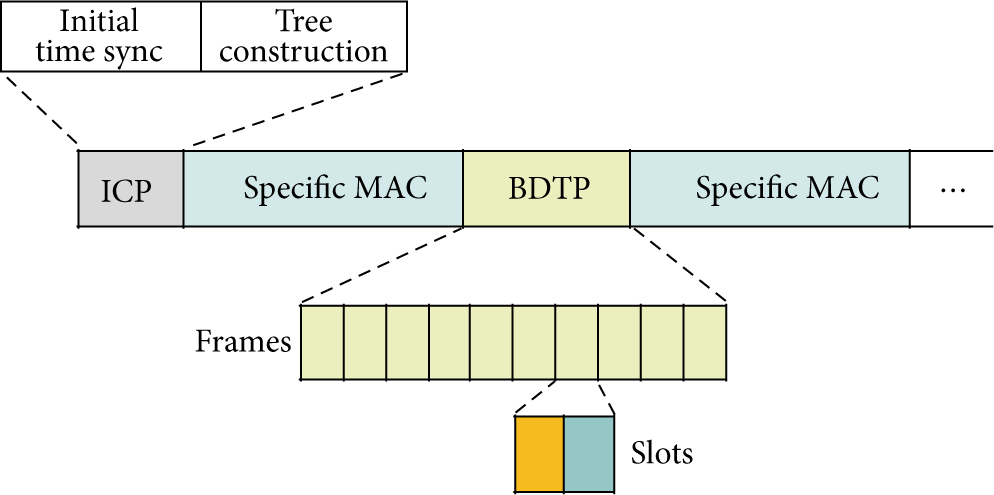
Protocol structure.
3.2. Time Synchronization
For the real-time applications in WSNs, sensor nodes usually need to be synchronized to perform the precise operation [16–18]. In our application, FTSP [17] is used since it can achieve high accuracy for global time synchronization.
In this network, the server with the lowest ID initiates the time synchronization process by broadcasting SYNC. When a node receives SYNC, it can achieve a pair of


3.3. Reliable Tree Construction
A tree-link quality is of great importance for the reliability of packet transmission in a tree-based network since most of data and control packets travel along the tree-links. Thus, the quality of a link is taken into account when building a tree. In the literature, link quality can be predicted by using one of assessment metrics, such as packet reception rate (PRR), received signal strength indicator (RSSI) [20], and link quality indication (LQI) [21]. Nevertheless, PRR has to collect numerous packets to achieve the meaningful results. In addition, PRR cannot judge a good stable link which has a good quality even under the effect of environment and a good unstable link which can be easily affected by the change of environment. RSSI and LQI can differentiate between the very good link and the remaining one. However, it is difficult to distinguish between bad, average, and good links.
To solve the limitation of individual metrics, the study in [22] introduced an efficient approach that uses a compound metric, given as follows:

In the practical environment, however, a wireless link can be unidirectional and the quality of a link can be varied due to the different transmission powers or the effect of environmental factors. These problems may affect the network performance significantly. Thus, the approach in [23] tried to solve these problems by using a hand-sake scheme. However, that approach does not take the quality of a link into account. Hence, this study introduces an efficient approach to determine the bidirectionally reliable link. The

An example of a B-reliable link determination.
Now we can construct a reliable tree such that every tree-link is B-reliable as follows. Initially, a server is the only member of a tree. The server starts the tree construction by sending tree construction request (TCR) message. Upon receiving TCR, an orphan node attempts to join the sink by transmitting join request (JREQ) message if a link between them is B-reliable. When a member node receives JREQ, it transmits join response (JRES) message and then the orphan is considered as its child if the corresponding link between them is B-reliable. Other orphans that have overheard JREQ can join the member through the same process. If the orphan node overheard many JREQs, it will choose a member which can have a B-reliable link and the smaller depth. The process of tree construction is completed when all nodes already join a tree.
In addition, to mitigate collisions of JREQs, each orphan node sets a join delay timer for sending JREQ as follows:

Algorithm 1 illustrates the process of tree construction in detail. The overhead of joining process is 2n (one JREQ and one JRES) and thus the complexity of message transmission is O(n), where n is the number of nodes.
( ( ( ( ( ( ( ( ( ( ( ( ( ( ( // a node can overhear multiple JREQs ( ( ( ( ( ( ( ( ( ( ( ( ( ( ( ( ( ( ( ( (
Besides tree construction, since network topology can be changed temporarily due to node failure or other effects of industrial environment, tree maintenance is required to perform during the operation of the specific MAC defined in Section 3.1. If the link to the parent node is broken, a node will attempt to join one of its neighbors that has a shorter depth by transmitting JREQ. In this case, slot rescheduling is performed to reflect the change of network topology.
3.4. Optimized Bursty Data Transmission
In this section, we describe the optimized bursty data transmission method, which is used to transmit bursty traffic progressively from the source of bursty data to a server. First, we present a path reservation method which is used to establish a dedicated path for the acquisition of bursty traffic. Second, we introduce the concept of an optimized channel-slot allocation and finally present frame-slot scheduling for bursty data transmission.
3.4.1. Path Reservation
In our application, an ordinary node sends data readings from environment to a sink periodically. When the sink detects an abnormal event in the particular monitoring area, a multimedia node located in that area is requested to send still images or video streams to confirm the occurrence of the event.
Firstly, sink S starts the bursty mode by transmitting a multimedia data request (MDREQ) toward the selected multimedia nodes. Upon receiving MDREQ, the target multimedia node becomes active (i.e., turns to AMN) and sends a path reservation request (PRREQ) message upward along tree path. The parent node, upon receiving PRREQ, marks itself as a forwarding node of the bursty data and forwards PRREQ upward until it reaches the sink. Upon receiving PRREQ, the server broadcasts a path reservation response (PRRES) message including the slot schedule of the BDTP. Node i, which has k children
Upon receiving PRRES, an AMN can send their bursty traffic according to a slot schedule of the BDTP. The sensor nodes related to the transmission path from the AMN to the server remain active to forward the bursty traffic, and the others are kept in sleep mode to preserve energy during the BDTP. A path reservation is illustrated in Figure 4. In this example, the network topology includes one server S, four MNs (nodes 4, 5, 7, and 9), and five ONs. Nodes 4, 5, and 7 are considered as AMNs.

An illustration of a tree network with path reservation.
The flooding technique is usually used to broadcast a message to all nodes in the network. Since a message is usually broadcasted without the acknowledgment of message reception, the reliability of a broadcast message cannot be secured, especially in a critical moment. Moreover, the broadcast storm may occur since a lot of sensor nodes rebroadcast the received message at the same time. To overcome these issues, a sink broadcasts PRRES by utilizing the scheduled broadcast slots [19], as given in Figure 5. Whenever receiving PRRES, a node rebroadcasts it within the allocated broadcast slot given by a slot scheduling. The number of broadcast slots of each node i, B(i), is collected recursively from leaf nodes to the sink as follows:



An illustration of broadcast slot assignment.
As illustrated in Figure 5, the server uses the slot #1 to broadcast PRRES. Then, node 1 and node 6 take the broadcast slots #2 and #6 to rebroadcast PRRES, respectively.
3.4.2. Optimized Channel-Slot Allocation Scheme
A slot reuse is a well-known technique to improve the efficiency of data transmission. Even though a slot reuse technique is employed, in case that one node transmits a burst of data consecutively, the efficiency of data transmission is limited due to the possibility of packet collision caused by the hidden terminal problem.
For example, consider Figure 6(a) in which five nodes are linked serially. If source node A desires to send a burst of data to node E, it must wait at least two time slots before it can start sending the next packet because of the hidden terminal problem. This limitation can be improved significantly if multiple channels are used. As shown in Figure 6(b), node A can send the next packet in every other slot.

The consecutive transmission of bursty data.
As explained above, the use of multiple channels can improve the speed of bursty data transmission. Consider a set of nodes that are serially connected from source
In fact, the interference range of a sensor node is usually larger than the communication range in the practical scenarios. Therefore, a node may interfere with other nodes that transmit packets at the same time, depending on the physical distance between them. According to the studies in [24, 25], the probability of interference between three-hop-away nodes is more than 0.14. If the distance between two nodes is larger than three hops, the probability of such interference goes down to a negligible value, 0.01 or less. Therefore, in our approach, slots are reused in four hops. It means that
Now, BDTP can be organized into frames, each frame consisting of two slots, given as (slot #0, slot #1), one slot for sending and the other for receiving data, respectively. Sensor nodes which are involved in bursty data transmission will be allocated a number of data frames for sending or forwarding the bursty packets on selected channel (either channel #1 or #2). For this purpose, a pair of

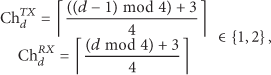
Table 1 shows the result of the allocation of a pair of
Channel-slot allocation according to the variation of depth d.
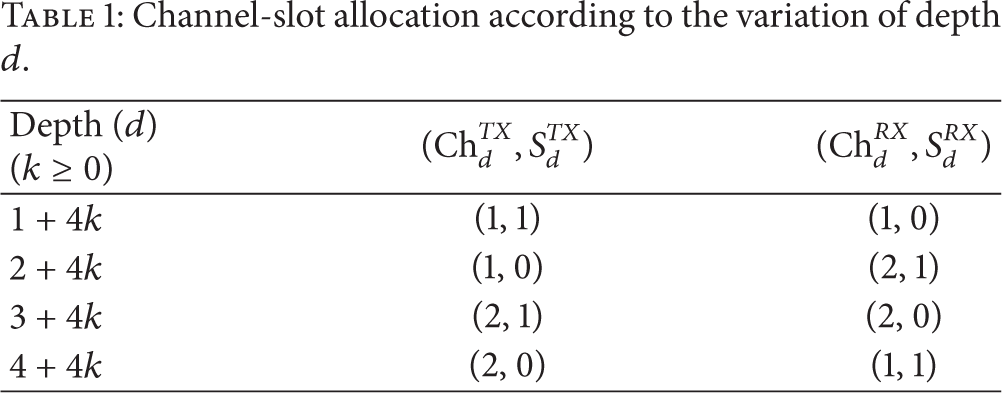
In fact, the concurrent data transmissions of four-hop-away nodes are not completely free from interference even though signal attenuation is enough. This implies that the signal of a sender at depth d can reach a receiver at depth
3.4.3. Frame-Slot Scheduling for Bursty Data Transmission
Given m AMNs, there are two approaches to acquire all bursty data. One is to get bursty data in an interleaved fashion while the other is to get the bursty data in a cascaded fashion. In the former method, a sink may receive multimedia content (i.e., still images) from different AMNs almost at the same time, when it is assumed that the sizes of the images are same. In the latter case, a sink receives all the packets from one AMN and then others. Obviously, the latter one can minimize the average response time in terms of the acquisition of a whole multimedia image.
Based on the latter approach, we develop the frame-slot scheduling of the BDTP. According to the structure of a data frame, a source node can send one packet in every data frame. Thus, the number of data frames, nFS(i), that an 

Figure 7 presents the structure of the frame-slot allocation for multiple AMNs that transmit their bursty data in a cascaded fashion. A dedicated path is established from an AMN to the server and then a burst of data packets from each source node will be processed continuously.

A structure of frame-slot scheduling for the transmissions of multiple AMNs.
Figure 8 illustrates the frame-slot scheduling for the same network topology given in Figure 4. In this case, we only present the data frames that are assigned to node 5 and the related nodes on the corresponding path to the server. A sending slot and receiving slot of each frame are determined by (7), and the channel number (i.e., 1 or 2) in each data slot is determined by (8). In this example, 11 data frames are used for sending a burst of 10 data packets of node 5. This frame-slot scheduling illustrates that two-hop-away nodes (i.e., nodes 5 and 2) can send data simultaneously.

An example of the frame-slot scheduling for bursty data transmission.
Now, it would be interesting to predict how much time is required to collect all data packets when multiple AMNs are distributed in the network, and an
First of all, we need to estimate the depth of an AMN in the given tree. It is assumed that all nodes are randomly deployed in the square dimensional terrain of 
Figure 9 shows the distribution of k (depth of a node) when the number of nodes (nNodes) is set to 25, the transmission range (r) is set to 5 m, and the dimension of the deployed area (a) is set to 25 m. Based on the result shown in Figure 9, the mean value of depth of a node can be estimated by 
The distribution of depth k of a node in a given topology (nNodes = 25, a = 25).
4. Performance Evaluation
4.1. Simulation Setup
For the evaluation of the proposed approach, we compare it (abbreviated as OpMAC) with the two recent TDMA-based protocols, TreeMAC [4] and I-MAC [5], by resorting the QualNet 5.0.2 network simulator. For effective comparison, we modified TreeMAC and I-MAC slightly to support the transmission of control messages and bursty data. For both TreeMAC and I-MAC, we used a flooding method to send a path reservation message to the target multimedia nodes. As for the bursty data transmission, TreeMAC allocates the number of frames for the nodes on the paths enough to forward the multimedia data from the AMNs, where each frame consists of three slots and the operation is exactly the same as that of the original TreeMAC protocol. With I-MAC, since only the AMNs have data packets, the slots are scheduled based on the demand of a node on the paths of bursty traffic acquisition. This way of slot scheduling is exactly the same as that of the original I-MAC protocol.
One thing to mention is that our approach targets a small control and monitoring network of less than fifty sensor nodes like the SMOCS, where sensor nodes are randomly distributed in a square dimensional area of 100 × 100 (m2). It is assumed that a critical event can happen randomly during simulation period. For each critical event, we assume that each active multimedia node generates a burst of 50 data packets, each consisting of 127 bytes. In this simulation, since we focus on the evaluation of burst data transmission, we used a small network of 25 nodes while the number of AMNs is varied. Some important parameters and their values used in the simulations are shown in Table 2.
Simulation parameters and values.
In the simulations, radio propagation environment is considered with the effect of the path loss model, shadowing model, and fading model. We use 2-ray path loss model which uses free space path loss for the direct line-of-sight propagation path and the reflection from flat ground. We use constant shadowing model which is suitable for the scenarios without mobility where the obstructions along the propagation paths remain unchanged. For the multipath fading effect, we use Rician fading model in which the Rician probability density function is given by [27]

For performance evaluation, some selected performance metrics are used as follows: Data acquisition time: the total time to acquire bursty traffic generated by multimedia source nodes in each critical event. Network throughput: the rate of successful data packet delivery measured at the sink per second (kbps). Packet delivery ratio: the ratio of the number of packets received successfully at the server to the number of data packets generated by the source nodes during the operating time.
4.2. Simulation Results
4.2.1. Data Acquisition Time
In WMSNs, one of the important metrics that can be used to evaluate how fast a protocol can deliver a data packet is data acquisition time which is defined as the time for all active multimedia source nodes to send a burst of data packets generated at each critical event to the sink. Indeed, in monitoring and control applications, a burst of data packets from a monitored object has to be sent to the sink within a time constraint (transmission deadline). If the deadline is missed, the acquired multimedia data would be degraded or sometimes be useless.
Figure 10 compares the data acquisition time of the three approaches according to the number of AMNs which are requested to send bursty data in each event. One AMN sends a burst of 50 consecutive data packets at a time. It is natural that the data acquisition time of the three protocols increases linearly in common as the number of AMNs increases. It is shown that our proposed approach, OpMAC, achieves the best performance in terms of data acquisition time in all cases, while I-MAC shows the highest data acquisition time. OpMAC reduces the data acquisition time by 33% compared with TreeMAC and 37% compared with I-MAC.

Data acquisition time according to the number of AMNs.
The reason is that I-MAC does not apply the slot reuse technique; therefore a node (at depth
4.2.2. Network Throughput
One important goal of the protocol design is to obtain better network throughput for supporting high data-rate applications. In this work, we evaluate the network throughput by counting how many data packets are successfully received at a sink in one second.
Figure 11 compares the network throughput of the three protocols according to the number of active multimedia nodes for each critical event. It can be seen that our proposed protocol can achieve the network throughput of more than 80 kbps and outperforms TreeMAC and I-MAC by more than 30%. Indeed, the network throughput is affected by the required time to deliver a burst of packets. In OpMAC, we allow the concurrent data transmissions of two-hop-away nodes at the same slot; thus the network throughput is increased significantly compared with I-MAC and TreeMAC.

Network throughput according to the number of AMNs.
4.2.3. Packet Delivery Ratio
To evaluate the reliability of the proposed approach, we use packet delivery ratio (PDR) as a performance metric. We use the Rician fading model in which K factor is varied as 3, 5, and 10.
Figure 12 compares PDRs of the three protocols according to the variation of K. As K increases, PDRs of all three protocols also increase consistently. It can be seen that OpMAC achieves the best PDR over 0.95 overall. Note that the link stability increases with the increase of K. It is natural that PDR increases consistently as K does since the line-of-sight signal between receiver and transmitter becomes dominant over other scatter signals.

Packet delivery ratio according to the variation of K factor.
The improvement of our approach in PDR comes from two aspects. Firstly, we employed the slotted broadcasting method to deliver the path reservation message reliably. Secondly, to mitigate the effect of the dynamic industrial environment, OpMAC employed a method to build a B-reliable tree in order to improve the transmission reliability of control messages and packets, whereas TreeMAC suffers from the irregular interference due to the utilization of slot reuse, thereby degrading its performance largely.
5. Conclusions
In this study, an optimized approach for the time-constrained and reliable acquisition of bursty data has been proposed. Our approach aims at delivering bursty traffic reliably and reducing the acquisition time of bursty data significantly by allowing the concurrent data transmission, thanks to the frame-slot scheduling algorithm. As a result, it could achieve higher network throughput and reduce bursty data acquisition time significantly in order to satisfy the tighter time constraint of real-time multimedia applications. In our application, the server is responsible for controlling the whole network. Therefore, during the period of bursty traffic transmission, the network activity would be restricted to the nodes that are involved in the acquisition of bursty traffic and the others are kept in sleep mode to preserve energy. In addition, the evaluation results have shown that our proposed approach outperforms the other protocols in the performance metrics of network throughput, data acquisition time, and packet delivery ratio. Therefore, we conclude that our approach should be a promising solution for the acquisition of bursty traffic in industrial WMSNs.
Footnotes
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Acknowledgment
This research was supported by Basic Science Research Program through the National Research Foundation of Korea (NRF) funded by the Ministry of Education (2013R1A1A2013396).