
Abstract
The Mobile Sink based data collection in wireless sensor network can reduce energy consumption efficiently and has been a new data collection paradigm. In this paper, we focus on exploring polynomial algorithm to compute the constrained trajectory of the Mobile Sink for data collection. We first present a universal system model for designing constrained trajectory in large-scale wireless sensor networks and formulate the problem as the Maximizing Energy Reduction for Constrained Trajectory (MERC) problem. We show that the MERC problem is NP-hard and design an approximation algorithm (CTMER), which follows the greedy approach to design the movement trajectory of the Mobile Sink by maximizing the effective average energy reduction. Through both rigid theoretical analysis and extensive simulations, we demonstrate that our algorithm achieves high computation efficiency and is superior to other Mobile Sink based data collection methods in aspects of energy consumption and network lifetime.
1. Introduction
With the development of digital electronics, wireless communications, and network technology, the applications of wireless sensor networks [1, 2] (referred to as WSNs) are becoming more widespread, including monitoring, event detection, and target tracking. In these applications, the sensor nodes mainly perform three aspects of the jobs: (1) collecting the required data from the environment sensing; (2) the data store or process; and (3) sending or forwarding data from other nodes to the data collection node ultimately, for example, sink node or base station.
In the traditional static wireless sensor network topology, the position of sink node is fixed; thus, the sink node and its surrounding sensor nodes need to transmit a larger amount of data and are likely to die prematurely due to energy exhaustion, which will be the energy bottleneck of large-scale WSNs [3]. In the static network topology, dealing with the energy problem is intractable in sensor network. In recent years, the data collection mode based on the Mobile Sinks has been proposed, in which one or more Mobile Sinks moved along a specific path in order to reduce the amount of forwarding. This is an efficient way to reduce the energy consumption of the sensor node itself and to make the energy consumption more evenly in large-scale network. In large-scale wireless sensor network, most nodes need to forward data through multihop; thus, the problem of how to reduce the number of forwarding hops in order to reduce the energy consumption has become a key issue. In the extreme case, the Mobile Sink can visit each node in WSNs (called flat collection), and the distance between each node and the Mobile Sink is only one hop. Obviously, the sensor nodes have the minimum energy consumption in this case; however, the delay of data collection will be the maximum; thus, the flat collection is not suitable for large-scale sensor networks. There is a possible solution which tolerates a certain delay to reduce the energy consumption. Many efforts [4–13] have been made to design the trajectory of the Mobile Sink. However, few of them focus on maximizing energy reduction.
In this paper, we design a data collection method based on the Mobile Sink to maximize the energy reduction in large-scale WSNs, in which the set of sensor nodes is divided into the sets of collection trees. The roots of the collection tree are called collection node, and the remaining sensor nodes forward the data to the corresponding collection node. The Mobile Sink visits all collection nodes to obtain data from the whole network eventually.
The key contributions of our work are summarized in the following:
We present the system model for data collection in large-scale wireless sensor networks and formulate the movement trajectory design problem as Maximizing Energy Reduction for Constrained Trajectory (MERC) problem. We show the MERC problem is NP-hard and develop an approximation algorithm, Constrained Trajectory based on Maximizing Energy Reduction (CTMER), which follows a greedy approach with polynomial time. We conduct thorough simulations to investigate the performance of CTMER. The simulation results show that CTMER is superior to other hierarchical data collection methods in aspects of energy consumption and network lifetime.
2. Related Work
The data collection methods based on the mobile infrastructure have been widely studied in recent years. Shah proposed a protocol using Data Mule [14] to collect sensor data in the sparse WSNs. In the scenario of Data Mule, any moving object with the communication function can be used as the mobile infrastructure, such as human, animal, or vehicle with the communication device. As the mobile infrastructures need to collect the data from all the sensors, they should have more energy and larger storage space.
Some universities and research institutions designed the mobile machines or collection vehicles for the data collection in WSNs. University of Southern California designed the mobile node Robomote [15], and Yale University designed the mobile node XYZ [16]. In addition, UCLA designed Packbot [17], and Richard et al. designed NIMS [18]. Zhang et al. designed the MDC—DataTruck [19]. These nodes can be used as the Mobile Sinks.
Paper [4] first proposed the concept of predicting the mobility of the Mobile Sink to improve performance of the sensor network. The sink nodes are placed on the bus cycle operation, and the sensor nodes are randomly distributed in the sides of the bus operation route. Due to the limit of the movement trajectory of the sink node and the effective communication distance, not all of the sensor nodes can communicate with the sink node directly in the practical applications.
Paper [5] described a road monitoring application and analyzed the trade-off between the data collection and energy in the sparse sensor networks. But it also adopts the single-hop communication as the data transfer mode of nodes.
Paper [6] proposed a data collection method, MASP, which generates the shortest path with the maximum amount of data. MASP focuses on optimization of the relationship between the members of the nodes in the network and the Mobile Sink and adopts the 0-1 linear programming to formalize the MASP problem. The authors proposed a genetic algorithm based on two-dimensional chromosome encoding and designed the corresponding data communication protocol. However, it ignores the movement trajectory of the Mobile Sink. Moreover, the time complexity can be very high.
Paper [7] proposed a learning based time-domain routing algorithm (HLETDR). The algorithm emphasized that the Mobile Sink accesses the fixed sensor nodes (moles) periodically, and the probability of the Mobile Sink at the current time domain is predicted in the moles. However, HLETDR did not give the solution to deal with latency problem of the data collection.
RD-VT [8] is an approach to design base station (BS) tour through constructing MST (Minimum Spanning Tree) and SMT (Steiner Minimum Tree). The objective of RD-VT is to find a tour of the BS that visits a set of nodes referred to as rendezvous points (RPs) with constrained length of BS tour while minimizing the total Euclidean distance of edges in the routing trees.
The Line-Based Data Dissemination (LBDD) [9] supposes that there are multiple sinks moving randomly in the sensor field and defines a vertical line or strip, which divides the sensor field into two equal parts. The nodes within the boundary of this wide line are called inline-nodes. This line acts as a rendezvous area for data storage and lookup. When a sensor detects a new event, it transmits a data report towards the virtual line. This data is stored on the first inline-node encountered. To collect the generated data reports, the sink sends its query towards the rendezvous area. The query is then propagated along the virtual line until arriving to the inline-node that owns the requested data. However, LBDD is unsuitable for periodic data collection scenarios due to the communication cost.
In Quad tree-based Data Dissemination (QDD) [10] protocol, a common hierarchy of data forwarding nodes is created by the data forwarding nodes using quad tree-based partitioning of the physical network into successive quadrants. In this approach, when a source node detects a new event, it calculates a set of rendezvous points by successively partitioning the sensor field into four equally logical quadrants. And the data reports are sent to the nodes which are closer to the centroid of each successive partition. The Mobile Sink follows the same strategy for the query packet transmission. The main drawback of this approach is that the rendezvous points in high lever will suffer high overhead, and the related hot spot problem may decrease the network lifetime and reliability. Moreover, there is no length limit of the Mobile Sink trajectory or deadline of data collection. This assumption may be not reasonable in practice.
In paper [13], the Combine-Skip-Substitute (CSS) scheme is proposed to minimize the tour length of mobile elements. In CSS, all sensor nodes are covered by the tour within a distance of d. However, CSS does not take the length constraint of tour into account and thus cannot be applied to delay sensitivity scenarios.
The Mobility assisted Energy efficient Georouting in energy harvesting Actuator and sensor Networks (MEGAN) [20] is a geographical routing, which reduces energy consumption through moving the sensor nodes toward the positions in the forward direction. However, not all movements of sensor nodes can be controlled in practice.
Paper [21] studies the problem of controlling sink mobility in deadline-based and event-driven applications to achieve maximum network lifetime and proposes an algorithm based on a decision tree and dynamic programming to approximately determine an optimal deadline-based trajectory (ODT). The algorithm assumes that each sensor node can adjust its transmission range; however, this assumption may be invalid in many applications.
3. System Model and Problem Formulation
3.1. System Model
We consider a set of static sensor nodes
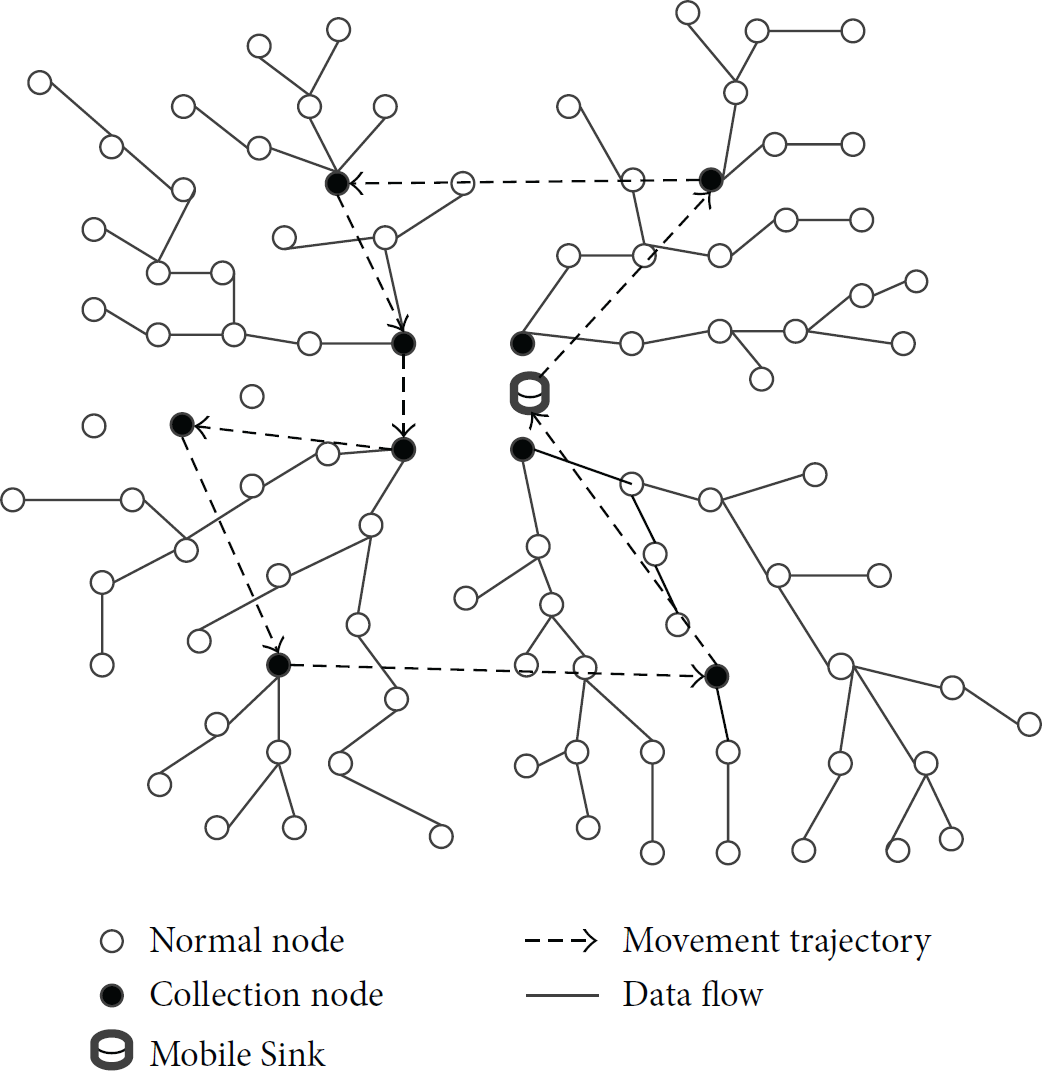
The Mobile Sink based data collection in large-scale wireless sensor networks.
This paper does not consider the issue of power control and assumes that all sensor nodes adopt the fixed transmitted power and received power; thus, the energy consumption is not related to the length between nodes. We adopt the energy consumption model described in [11, 22]. Within the single time period T, the energy consumption of any sensor nodes

3.2. Problem Formulation
According to formula (1), we can reduce energy consumption by reducing the hops from the normal nodes to the corresponding collection nodes. We choose an ordered set of collection nodes
Our objective is to design the trajectory M of the Mobile Sink to complete data collection for all sensor nodes and return back to the original position within the time period T with maximum total energy reduction. We call this problem Maximizing Energy Reduction for Constrained Trajectory (MERC), which can be formalized as follows:
decision variables:
objective function:
constraints:
where


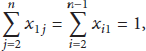

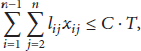
The objective function (3) makes M to maximize the energy reduction. Constraint (4) presents that the Mobile Sink moves from the original position and returns to the original position finally. Constraint (5) presents that there is connectivity among the sensor nodes and each sensor node can only be accessed once in T. Constraint (6) presents the length constraint of M.
4. Constrained Trajectory Based on Maximizing Energy Reduction
4.1. Complexity Analysis of MERC Problem
First of all, we attempt to find a computable feasible algorithm for the MERC problem. Unfortunately, as the following lemma shows, it is NP-hard to find the optimal solution even
Lemma 1.
The static MERC problem is NP-hard.
Proof.
We demonstrate that static MERC belongs to NP firstly. Given an instance of static MERC, we can check whether the length of M is no more than
Next, we prove static MERC is NP-hard by giving a polynomial time reduction from the NP-hard Orienteering Problem [12], OP.
Instance of OP (denoted by
We consider a corresponding instance of static MERC (denoted by
This reduction from
It is obvious that the MERC problem with dynamic
Theorem 2.
The MERC problem is NP-hard.
4.2. CTMER Design
Since the MERC problem is NP-hard, we turn our attention to develop an approximation algorithm. Given the time period T, the movement speed of the Mobile Sink C, the set of sensor nodes V, and a position vector
The design rationale is that CTMER first generates original collection trees based on the original position of the Mobile Sink, and the roots of the original collection trees are the initial collection nodes. And then CTMER iteratively selects the nodes with maximum effective average energy reduction in current topology state as the collection nodes. As illustrated in Algorithm 1, CTMER follows a greedy approach to solve MERC problem and designs the movement trajectory of the Mobile Sink before running.
(1) (2) (3) (4) (5) (6) (7) (8) (9) (10) (11) (12) (13) (14)
CTMER uses the function
(1) Initialize collection trees based on (2) (3) (4) (5) (6)
Considering each node
When performing a
(1) (2) (3)
4.3. An Instance of Collection Tree Construction
To design the movement trajectory of Mobile Sink, it is necessary to generate the original topology of the sensor network, which can be generated through many different methods. Even so, we give an instance of collection tree construction, which performs in Algorithm 2 (Line 1).
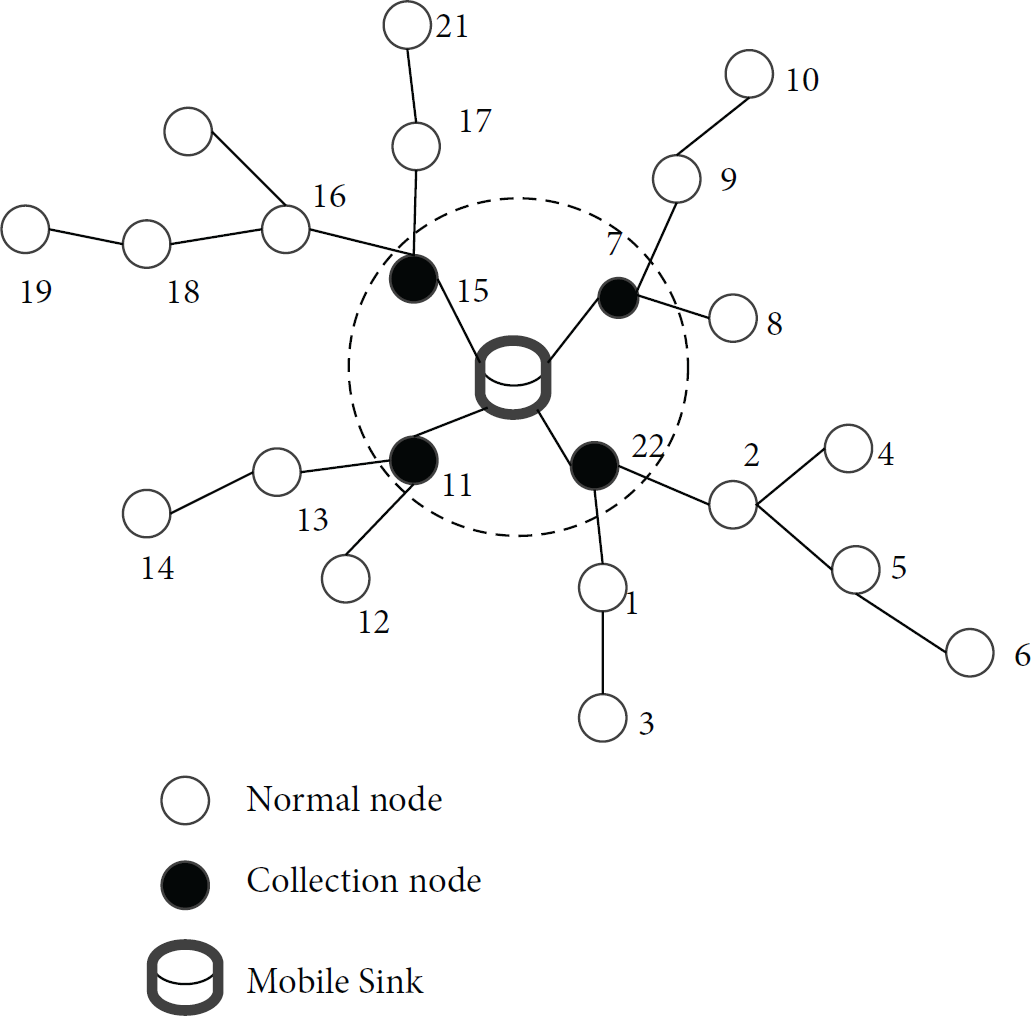
We consider the Mobile Sink is in arbitrary position


An instance of sensor network with one Mobile Sink and 22 sensor nodes.
The collection trees initialized in our instance.
4.4. Computational Efficiency of CTMER
The computational efficiency of trajectory design algorithm is important in large-scale wireless sensor networks. We have the following theorem about the computational efficiency of CTMER.
Theorem 3.
CTMER is computationally efficient.
Proof.
The function
Note that the running time of CTMER, O(
5. Performance Evaluation
5.1. Simulation Setup
We implement CTMER on the MATLAB platform and compare our protocol to RD-VT (with a variable BS track), QDD (with one Mobile Sink), and LBDD (with one Mobile Sink using the progressive-footprint-chaining strategy) in order to investigate the performance of CTMER. We list the default parameter setting in Table 2. Each measurement is averaged over 200 instances.
Simulation parameters.

Since the object of CTMER is maximizing the total energy reduction, we focus on the following four aspects, which are key metrics in large-scale WSNs:
Energy consumption: this represents the sum of the energy consumption of all sensor nodes in wireless sensor network within first 600 s with fixed message generation ratio. We use the energy consumption model described in Section 3 and investigate the performance with different number of sensor nodes and different speed of the Mobile Sink. The LBDD and QDD follow query mode other than collecting data periodically; thus, we set the number of queries as the number of sensor nodes. This means that the Mobile Sink queries data once for each sensor node within first 600 s. Network lifetime: this represents the elapsed time from the start to the end of the first node energy depletion. Total path length: this represents the total hops for all sensor nodes to forward the data to the Mobile Sink. We do not test the total path length of LBDD and QDD, since there is no actual routing tree in these two protocols. Numbers of Cut operations: this represents the number of Cut operations when we use CTMER algorithm to optimize the energy. We vary the speed of the Mobile Sink to investigate the impact on the number of Cut operations.
5.2. Analysis of Results
We first investigate the impact on the energy consumption of the sensor network with the increasing number of sensor nodes. As can be seen from Figure 4, the energy consumption is increasing with the increasing number of nodes for all four protocols. RD-VT minimizes the total Euclidean distance of edges in the routing trees other than the total hop count from sensor nodes to collection nodes; thus, it does not perform good enough comparing with CTMER. The energy consumption of QDD and LBDD is higher than both CTMER and RD-VT because a large number of queries from the Mobile Sink and data from rendezvous points need multiple hop forwarding. For LBDD, the sources need to forward the data to the first inline-node, which may be far away from the sources. CTMER uses the Cut operations to optimize the total path length of the collection trees, which makes significant impact on energy consumption in our energy consumption model, and performs best in all compared protocols.

Energy consumption with different number of sensor nodes.
Figure 5 shows the impact on the energy consumption with increasing speed of the Mobile Sink. In CTMER, the increasing moving speed means the increasing length of the trajectory when the single time period is fixed and incurs more Cut operations; thus, the energy consumption of CTMER reduces gradually. With the similar reason, RD-VT can choose more rendezvous points in the Steiner Minimum Tree. However, the number of rendezvous points or inline-nodes is independent with the speed of the Mobile Sink in LBDD and QDD; thus, the energy consumption of them has no distinct change.

Energy consumption with different speed of the Mobile Sink.
We then test the network lifetime of the protocols. We can see from Figure 6 that the network lifetime of all protocols decreases with the increasing number of sensor nodes. In hierarchical structure based method, the network lifetime is significantly relevant to the overhead of the collection nodes. In CTMER and RD-VT, the overhead of collection nodes is determined by the number of sensor nodes in collection trees since the packet generation ratio is fixed. With the increasing sensor nodes, there are more sensor nodes in collection trees in average, and the overhead of collection nodes increases accordingly in both CTMER and RD-VT. The performance of CTMER and RD-VT is very closed in aspect of network lifetime. However, the overhead of rendezvous points in high lever will increase significantly in QDD, and the network lifetime decreases dramatically with the increasing scale of network.
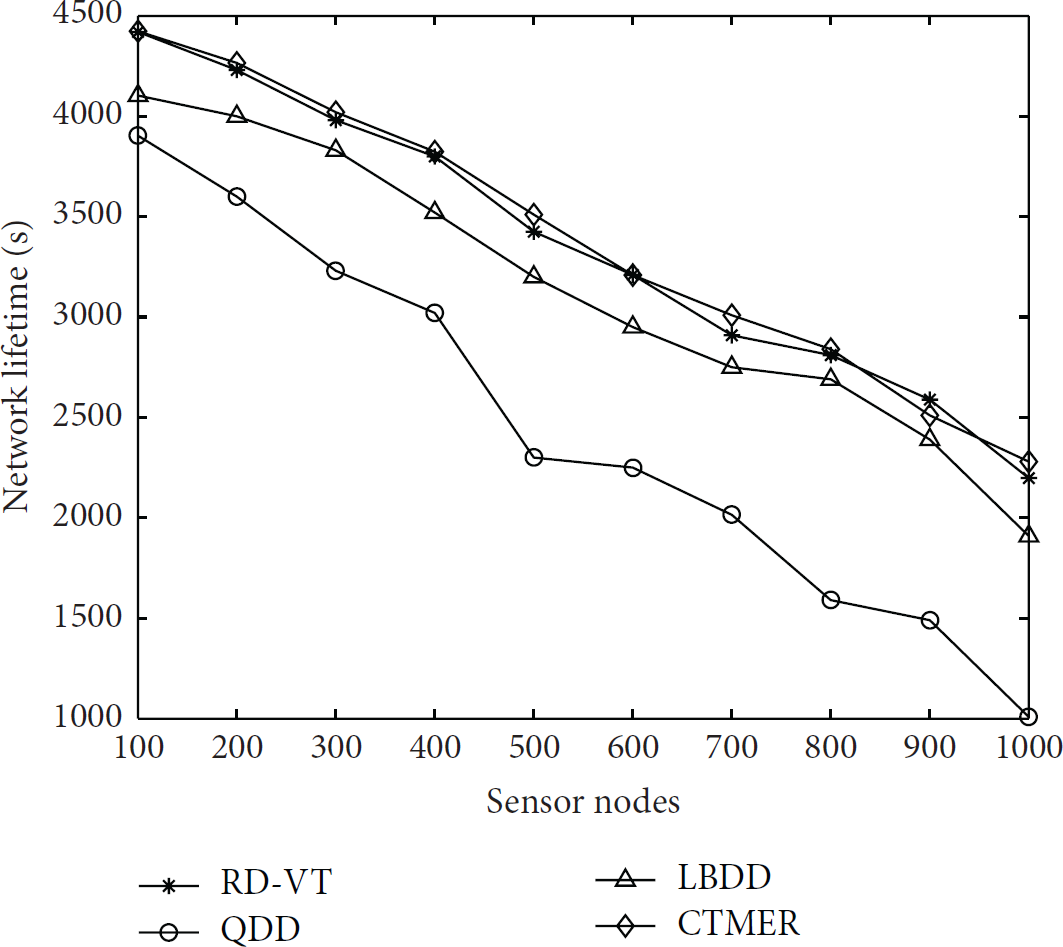
Network lifetime with different number of sensor nodes.
Figure 7 shows the impact on the network lifetime with the increasing speeds of the Mobile Sink. As the collection tree based protocols, the network lifetime of both CTMER and RD-VT increases dramatically because there are more collection nodes to share the overhead. On the contrary, there is almost no influence on QDD and LBDD. This is because the rendezvous points in QDD and LBDD are selected based on the structure and scale of network and are irrelevant to the speed of the Mobile Sink.
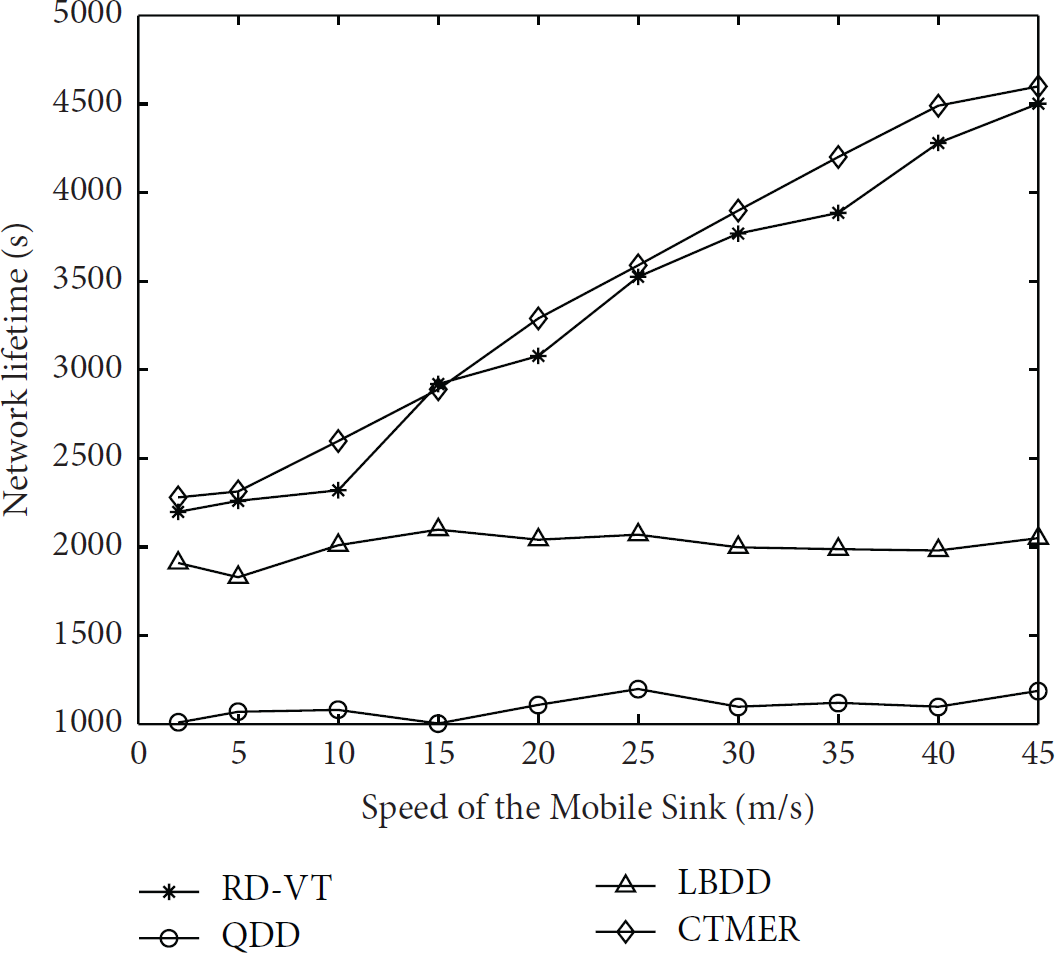
Network lifetime with different speed of the Mobile Sink.
Figure 8 shows the total path length of CTMER and RD-VT with the increasing sensor nodes. Recall that the total path length is the total hop count from all sensor nodes to the corresponding collection nodes, and it determines the total energy consumption in single time period based on the energy consumption model used in this paper. The total path length of both CTMER and RD-VT increases with the increasing network scale. We can see that CTMER is superior to RD-VT in aspect of total path length. This is because CTMER and RD-VT use different method to choose the collection nodes to achieve the different objectives. CTMER aims to optimize the total hop count while RD-VT minimizes the total Euclidean distance of edges in the routing trees.
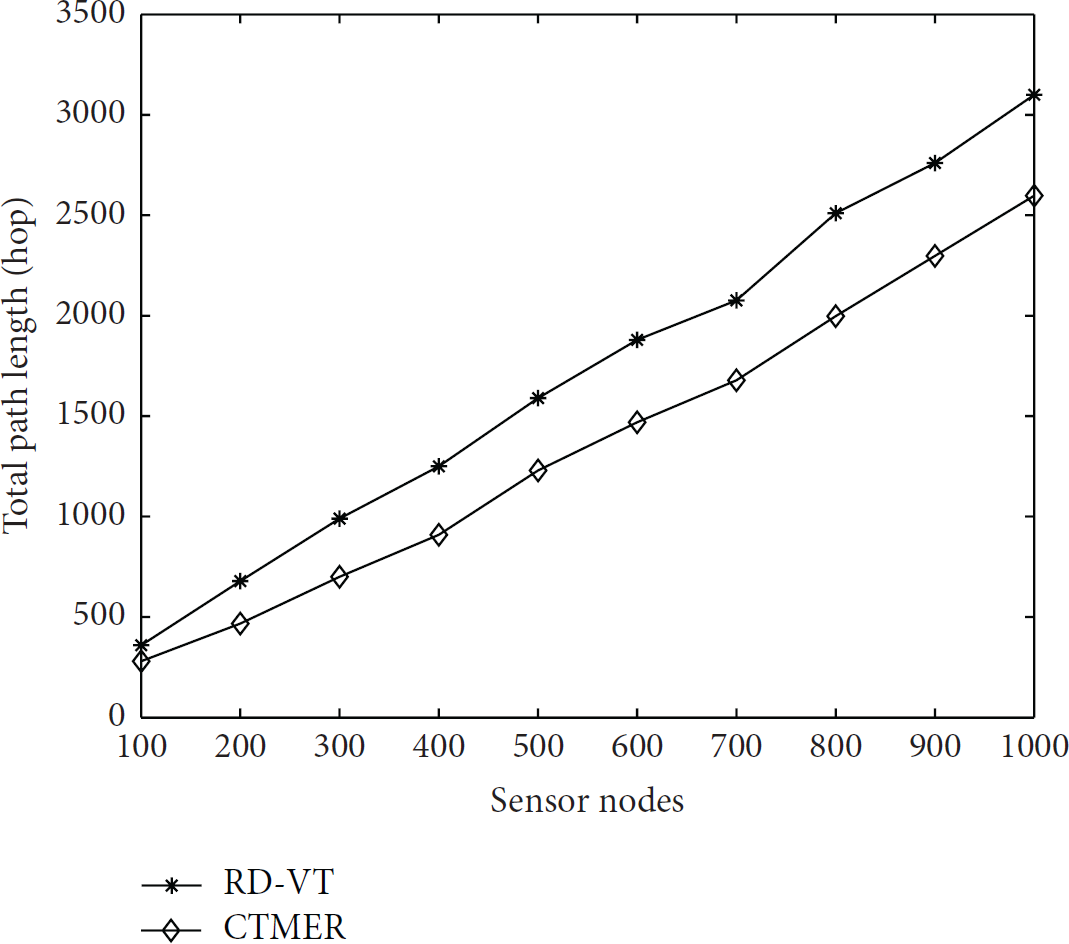
Total path length with different number of sensor nodes.
CTMER chooses the collection nodes iteratively until the trajectory length of the Mobile Sink does not meet the constraint. Thus, CTMER can do more Cut operations when the limit length of trajectory becomes longer. We can see from Figure 9 that the number of Cut operations increases dramatically from 5.1 to 26.2 with the speed of the Mobile Sink since the Mobile Sink can move far away in single time period.
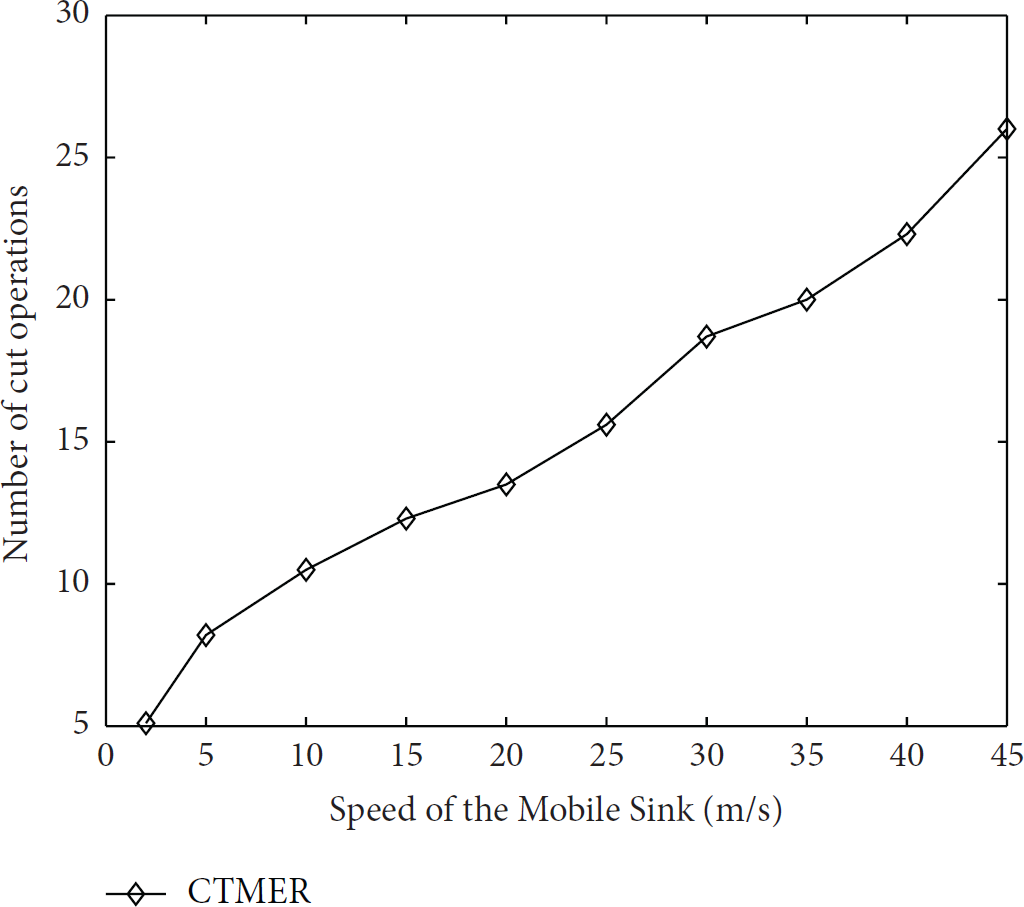
Number of Cut operations with different speed of the Mobile Sink.
6. Conclusion
In this paper, we have presented the system model for designing constrained trajectory in large-scale wireless sensor networks under our energy consumption model and formulated the problem as the MERC problem. We designed an approximation algorithm (CTMER), which follows the greedy approach to design the movement trajectory of the Mobile Sink through maximizing the effective average energy reduction. CTMER uses Cut operations to choose the collection nodes iteratively until the trajectory length of the Mobile Sink does not meet the constraint. Through both rigid theoretical analysis and extensive simulations, we demonstrated that our algorithm achieves high computation efficiency and is superior to other Mobile Sink based data collection methods in aspects of energy consumption and network lifetime.
Footnotes
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Acknowledgments
This work is sponsored in part by NSFC Grant (nos. 61472193, 61472192, 61373139, 61300240, and 61472283), the Natural Science Foundation of Jiangsu Province (nos. BK20141429, BK20130852, and BK20151511), Scientific and Technological Support Project (Society) of Jiangsu Province (no. BE2013666), CCF-Tencent Open Research Fund (AGR20150107), China Postdoctoral Science Foundation (no. 2014M562662), Jiangsu Postdoctoral Science Foundation (no. 1402223C), Project of Natural Science Research of Jiangsu University (no. 14KJB520027), and Scientific and Technological Support Project (Society) of Lianyungang (no. SH1306).