
Abstract
Collision avoidance and road safety applications require highly accurate vehicle localization techniques. Unfortunately, the existing localization techniques are not suitable for road safety applications as they rely on the error-prone Global Positioning System (GPS). Likewise, cooperative localization techniques that use intervehicle communications experience high errors due to hidden vehicles and the limited sensing/communication range. Recently, GPS-free localization based on vehicle communication with a low cost infrastructure installed on the roadsides has emerged as a more accurate alternative. However, existing techniques require the vehicle to communicate with two roadside units (RSUs) in order to achieve high localization accuracy. In contrast, this paper presents a GPS-free localization framework that uses two-way time of arrival to locate the vehicles based on communication with a single RSU. Furthermore, our framework uses the vehicle kinematics information obtained via the vehicle's onboard inertial navigation system (INS) to further improve the accuracy of the vehicle location using Kalman filters. Our results show that the localization error of the proposed framework is as low as 1.8 meters. The resulting localization accuracy is up to 65% and 47.5% better than GPS-based techniques used without/with INS, respectively. This accuracy gain becomes around 73.3% when compared to existing RSU-based techniques.
1. Introduction
The growth in motor vehicle crashes and fatalities has recently caused safety applications for smart roads to receive significant attention to save millions of lives. According to the National Highway Traffic Safety Administration (NHTSA) in 2013, 5.4 million car crashes take place in average every year out of which 35,244 are fatal crashes. The average number of people killed on US roads each day is 80 and the estimated number of people injured in motor vehicle traffic crashes is 2.36 million. It is predicted that road crashes will be the fifth leading cause of death by 2030. In addition to such huge fatalities, billions of dollars are also lost every year in such crashes [1].
In order to develop robust road safety and collision avoidance systems, highly accurate vehicle localization techniques are needed. Many vehicle localization techniques have been recently proposed which can be broadly classified into absolute positioning techniques and relative positioning techniques. In absolute positioning techniques, each vehicle has the ability to determine its own absolute location—without regard to nearby vehicles—based on using either Global Positioning System (GPS) [2–6] or roadside units (RSUs) [7–9]. Such positioning techniques are only applicable for navigation and fleet management application and are not well suited for collision avoidance applications. This is because of their low accuracy that can be up to tens of meters in GPS-based systems, the lack of lane-level positioning, and the discontinuous availability issues in the case of GPS-based techniques. On the other hand, relative positioning techniques use intervehicle communication and cooperative position approaches to determine the vehicles' locations relative to each other [6, 10–18]. However, cooperative localization techniques—which typically use either millimeter wave radar sensors or vision sensors—suffer not only from the limited sensing range and high cost of these sensors but also from the problems of hidden vehicles, slow update rates, and the multipath effect. Furthermore, lane-level vehicle localization techniques which use vision-based lane-recognition systems suffer severe accuracy degradation in adverse weather conditions or in unclear lane signature situations [16–18].
In this paper, we present a highly accurate—yet low-cost—GPS-free integrated localization framework for collision avoidance and intelligent road safety applications. Unlike related works [7, 8] which typically use 2 roadside units (RSUs) for localization, our goal is to have each vehicle determining its location with respect to a single RSU in order to decrease the required number of RSUs and, consequently, reduce the cost of the localization system installation. The constraint of using a single RSU in vehicle localization poses a significant challenge in locating the vehicles with high accuracy. We use the vehicle kinematics information obtained through the inertial navigation systems (INS) and the road constraints broadcasted by RSUs to further improve the predictability and the accuracy in vehicle localization and provide lane-level localization accuracy.
The proposed localization framework consists of four stages: (1) determining the vehicle's driving direction, (2) estimating the distance between the vehicle and the RSU via two-way time of arrival (TOA) ranging to get an initial estimate of the vehicle location in the road length dimension, (3) obtaining a highly accurate estimate of the vehicle location in both the x- and y-dimensions by using Kalman filters to fuse the range obtained in the second stage and the vehicle kinematics information available through the vehicle's inertial navigation system, and (4) ensuring that the vehicle location in the road width dimension is within the physical boundaries of the road/lane which significantly improves the accuracy of the vehicle localization.
Our results show that the accuracy of the proposed single RSU localization framework significantly outperforms existing localization using GPS technique as well as existing RSU-based techniques. More specifically, our results show that the localization error of the proposed framework is as low as 1.8 meters. The resulting improvement in the localization accuracy is up to 65% and 47.5% compared to GPS-based techniques used without/with INS, respectively. This accuracy gain becomes around 73.3% when compared to existing RSU-based techniques.
The rest of the paper is organized as follows. In Section 2, we review the related literature. We present the system model in Section 3. In Section 4, we present our GPS-free vehicle localization framework. Then we evaluate the performance of the proposed framework in Section 5 and conclude the paper in Section 6.
2. Related Work
In this section, we overview the existing literature of positioning techniques that can be broadly classified into absolute positioning techniques and relative positioning techniques.
2.1. Absolute Positioning Techniques
2.1.1. GPS-Based Absolute Positioning
Such positioning approach uses the Global Positioning System (GPS) to determine the position of each vehicle. The traditional GPS localization technique [2] uses GPS receivers to continuously receive the data being sent by the GPS satellites. The received data is used to estimate the vehicle's distance to at least four known satellites using a technique called time of arrival (TOA) and then computes the actual position via trilateration.
GPS-based techniques suffer many challenges. One main challenge is the low accuracy of GPS systems (10 m–30 m) that is not sufficient for vehicle collision warning systems. Therefore, several modifications of the basic GPS technique have been proposed to increase the accuracy of GPS-based localization. An example of such methods is the radio-frequency-GPS (RF-GPS) [3] that employs a differential GPS (DGPS) concept to improve the GPS accuracy. DGPS [19] is a method to improve the positioning of GPS using one or more reference stations at known locations, each equipped with at least one GPS receiver. The reference station(s) calculates the error and broadcasts it.
Another problem in GPS-based techniques is the existence of tall buildings which prevent the GPS receivers on vehicles from receiving strong satellite signals. Assisted-GPS (A-GPS) has been proposed to enhance the performance of standard GPS in devices connected to the cellular network by using an A-GPS server [4]. Although there exist some enhanced versions of GPS such as the A-GPS and RF-GPS, they require extra infrastructures and, hence, add cost.
2.1.2. GPS-Free Absolute Positioning
The need for GPS-free localization techniques comes from the facts that the accuracy of GPS positioning algorithms (with localization error between 10 m and 30 m) are not accurate enough for collision warning system applications. Thus motivated, new techniques using roadside units (RSUs) [7–9] have been proposed to eliminate the need to use GPS techniques. RSUs are installed on both sideways of the road and all the vehicles are equipped with onboard unit (OBU) devices that are able to communicate with the RSUs. Hence, each vehicle has the ability to estimate its coordinates relative to the RSUs. The author of [7] assumed that there are two RSUs installed on both sides of the road and each vehicle estimates its location relative to those two RSUs using a technique called faulty-free. The author in [7] also illustrates another scenario, called faulty, in which one of the RSUs fails such that only one RSU remains functional.
Alternatively, the proposed approach in [8] depends on obtaining the initial position using single RSU information and updates the position all the way using dead reckoning. Dead reckoning [7] is a technique that is originally used for localization in the absence of GPS coverage in GPS-based techniques which is an effective alternative to intervehicle communications techniques [10, 11]. However, the accumulation of dead reckoning error makes the localization accuracy of [8] significantly deteriorate with distance as we shall demonstrate in the simulation results. The localization approach in [8] does not use any distance-measuring techniques such as time of arrival (TOA) [20], time difference of arrival (TDOA) [21], and received signal strength (RSS) [11]. Thus motivated, the authors of [9] proposed to use TOA-based distance-measuring to significantly reduce the positioning error and restrict the use of the erroneous dead reckoning to the close proximity of the RSU.
2.2. Relative Positioning Techniques
All of the above absolute positioning techniques are not suitable for collision avoidance applications due to their limited accuracy. Furthermore, such techniques are not capable of determining the lane in which the vehicle is traveling. Hence, they are not applicable to collision avoidance systems in which a vehicle has to accurately know its relative distance with the neighboring vehicles. Relative positioning techniques have emerged to improve the positioning accuracy by having the vehicles exchanging their erroneous location information and jointly cooperate to reach a more accurate positioning relative to each other. Such cooperative techniques [10–15] estimate intervehicle distances using either RSS [11], time of arrival (TOA) [12], both of RSSI and two-way TOA [10], millimeter wave radar sensors [13], vision-based sensors [14], or Doppler shift [15] as an intervehicle ranging technique.
2.2.1. GPS-Based Relative Positioning
Several existing relative positioning techniques rely on GPS as an input to the localization process. Examples include the Intervehicle-Communication-Assisted Localization (IVCAL) which uses a Kalman filter (KF) to fuse the positioning information obtained by both GPS and the inertial navigation system (INS). The KF-fused position and the relative distance estimation, obtained from intervehicle communication, are integrated using least square optimization in order to increase the accuracy of the localization of every vehicle in the network. Likewise, the grid-based on-road localization (GOT) system was developed to use vehicle cooperating to allow vehicles with blocked GPS signal, for example, when the vehicles are inside a tunnel or on a road surrounded by high rises, to accurately calculate their position through the help of at least three vehicles with good GPS signals using intervehicle distance estimation.
2.2.2. GPS-Free Relative Positioning
In order to improve the predictability and the accuracy in vehicle localization, several works have been carried out to develop GPS-free cooperative vehicle localization schemes that do not rely on any form of GPS assistance [10, 11, 14]. For instance, [11] proposed a three-phase localization technique in which each vehicle initially estimates the intervehicle distances with its neighbors using RSSI. After sharing such information with neighboring vehicles, each vehicle improves its estimation alongside the vehicle kinematics and road constraints information using Kalman filter [22]. The process is iterated periodically to maintain an up-to-date estimate of the vehicle position. Meanwhile, the authors of [14] proposed a two-phase GPS-free neighbor-vehicle mapping framework that has each vehicle fetching the neighboring vehicles' presence/absence status information from a vision-based environment sensor system that covers a specific calibrated region in the front, back, and adjacent left/right lanes of the vehicle using omnivision camera-based sensor systems. After exchanging this status information with neighbor vehicles, each vehicle builds a relative local map that links the neighbors' information and their communication addresses, such as Medium Access Control/Internet Protocol (MAC/IP), with the vehicles' cardinal locations.
GPS-based positioning techniques suffer from many problems that degrade the localization accuracy including multipath and signal blocking with high buildings and during moving through tunnels. In contrast, our proposed localization technique is based on using RSUs for localization to improve the accuracy and the complexity of the existing node localization algorithm. We also exploit fusion techniques developed for relative positioning to further increase the localization accuracy. However, we only rely on the vehicle's own information only without any kind of intervehicle information.
3. System Model
In our system model, vehicle localization is not based on GPS receivers. Instead, we assume that all vehicles are equipped with onboard unit (OBU) devices that are used to determine the vehicle's distance to the RSUs using vehicle-to-road (V2R) communication. We use the dedicated short-range communications (DSRC 5.9 GHz) for intelligent transportation systems over which the IEEE 802.11p operates. We exploit RSUs deployed only on one side of the road to locate the vehicles. The RSUs broadcast periodic beacons containing the ID of the road and the location of the RSU. For collision avoidance, we assume that the neighboring vehicles exchange their locations using vehicle-to-vehicle (V2V) communication. However, we do not use V2V communication for the localization process itself, and, hence, V2V communication falls behind the scope of the paper.
Each vehicle is equipped with a digital odometer, a compass, and an inertial navigation system (INS) which are commonly available devices in modern vehicles. INS is a navigation technique used to get the current position of an object relative to a previous position by measuring the velocity and orientation of the object. The most common sensors used to get the previous measurements are accelerometers and gyroscopes that provide the velocity and the direction information, respectively.
We assume that vehicles move on dual carriageway highway separated by a central reservation. The road is straight all the way and there are multiple entry and multiple exit points along the road. Such a road model is widely adopted in the related literature. Each entry point is equipped with an RSU. We assume that the entry/exit points are interleaved (i.e., at a given y-location, we can have only one entry to the road with an exit on the other side) as the typical case depicted in Figure 1. The road has shoulders that a vehicle can use to reverse the driving direction. However, the road does not have any intersections. We assume that the distance between the RSU and the vehicle R is large and the width of the road W is too small compared to its length L, and, hence, the curvature is assumed to be nearly linear. The Notations summarizes the used notations.

Illustration of the system model.
4. GPS-Free Vehicle Localization Framework via an INS-Assisted Single RSU
We introduce a GPS-free localization framework that only uses (1) a single RSU for locating the vehicle along the road length (y-dimension) and (2) INS information with Kalman filtering to accurately specify the lane-level location of the vehicle (x-dimension). The vehicle location is constrained by the road boundaries broadcasted from the RSU which contain information about the geometry of the road such as width of the road and number of lanes. Each vehicle then shares its computed location information using V2V communications with nearby vehicles to be used for collision avoidance systems. However, this paper is only concerned with determining the location of the individual vehicles.
The proposed framework consists of four main components: (1) determining the vehicle's driving direction which is either north (N) or south (S), (2) measuring the distance between the vehicle and the nearest RSU,

The proposed GPS-free integrated framework for vehicle localization using a single RSU and INS information.
4.1. Determining the Vehicle Driving Direction
This section discusses our proposed technique to find the driving direction. In [7] a technique for determining the driving direction using two roadside units installed on both sides of the road has been proposed. A vehicle determines its driving direction by comparing the angle between its current movement vector and the north (or south) roadside unit. Meanwhile, the authors in [8] assume that there are RSUs installed on one side of the road and each vehicle should receive and evaluate the position information of 2 consecutive two RSUs to get the driving direction. Given our system model, the major challenge here is how to get the driving direction with the help of only one RSU installed on one road direction and minimize the start-up time.
We propose the following algorithm which is invoked every time the vehicle enters a new road to decide the direction the vehicle is traveling. Without loss of generality, we denote the travel direction as either north (N) or south (S) to distinguish the two travel possibilities. However, the absolute travel direction is obtained by interpolating the RSU well-defined coordinates which are exactly known and broadcasted to all vehicles. We first assume that there are two types of roadside units: one type which is at the entry points of the road. The second type of RSUs is in the middle of the road between the entry points. We assume that an entry RSU broadcasts the driving direction either N or S while a middle RSU has a Null direction field in its beacon. When a vehicle first enters the road, it will determine its driving direction based on the direction of the first beacon received from an entry RSU. As the vehicle moves along the road, it receives a beacon from a middle RSU which contains the ID and the location of the RSU. The driving direction is updated to be either the same or the opposite direction based on the ID of the new RSU (included in the incoming beacon) and the ID of the previous RSU (stored on the OBU which is initially set to Null). Therefore, even if the vehicle make a U-turn using the shoulder, comparing the new received RSU ID with the ID stored on the OBU will allow the vehicle to know that the driving direction has been switched. Algorithm 1 outlines the proposed algorithm assuming that the RSU ID increases in the north direction.
(1) (2) (3) Driving Direction = Beacon.Direction (4) Current RSU = Beacon.ID(RSU) (5) (6) (7) Driving Direction = North (8) (9) Driving Direction = South (10) (11) Current RSU = Beacon.ID(RSU) (12)
It is worth mentioning that Algorithm 1 can be easily generalized to vehicle localization in intersected roads. In such a case, the intersection points should be equipped with RSUs that broadcast all four possible travel directions: the legacy directions N and S, as well as two perpendicular directions such as east (E) and west (W). The intersection RSUs are treated as entry/exit points of the perpendicular road. When the vehicle receives a beacon from such an intersection RSU, it checks whether the driving direction is the same or has been switched to the perpendicular direction. However, intersected roads fall behind the scope of this paper.
4.2. Estimating the Vehicle Distance to the RSU (Ranging)
The goal of this stage is to estimate the y-location of the vehicle based on estimating the distance between the vehicle and the RSU,

It is worth mentioning that (1) is only valid under the assumption that the distance between the RSU and the vehicle is large enough and the width of the road is too small compared to its length, and, hence, the curvature is assumed to be a line as per our system model. When the vehicle moves closer to the RSU, this assumption is no longer valid. Therefore, the proposed ranging technique is used to provide an estimate of the y-location of the vehicle to be refined in the next stage only when
Many techniques are used for range measurements such as received signal strength (RSS) [11], angle of arrival (AoA) [23], time difference of arrival (TDOA) [21], and time of arrival (TOA) [20]. In our proposed technique, we use the two-way reciprocal time of arrival [24] technique which is preferred in the presence of multipath interference and does not need synchronization between the transmitter and the receiver. Recall that DSRC systems should be resilient to multipath fading [25]. The proposed two-way reciprocal time of arrival technique works as follows. When the vehicle receives a beacon from the RSU, the vehicle will send a request to send for two-way TOA (RTS-T) packet at time





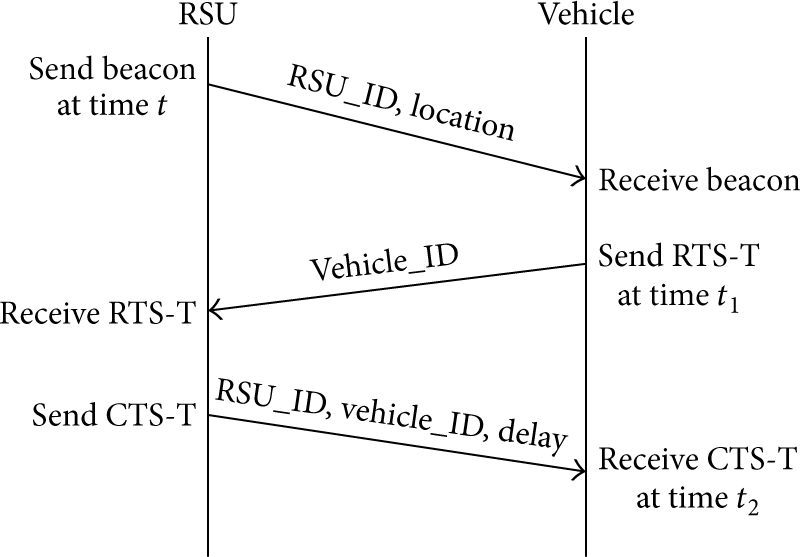
The timeline of the proposed two-way TOA packet handshake.

Range estimation using two-way TOA.
4.3. RSU/INS Integration for Vehicle Localization
In the second stage of the proposed framework, we have only obtained an estimate
Our approach is to use data fusion techniques such as Kalman filter that is widely used to enhance the vehicle location obtained from GPS receivers [11, 26, 27]. Unlike such techniques which integrate the readings from both GPS receivers and the vehicle's inertial navigation system (INS) to form an estimate of the vehicle location, we use different types of Kalman filters to either enhance the y-location obtained from our single RSU ranging approach,
For vehicles moving outside the threshold area, the y-location,
For vehicles moving inside the threshold area around the RSU, where there is no linear relation between

An illustration of the various fusion techniques used along the road. Vehicles
4.3.1. Kalman and Extended Kalman Filters Preliminaries
In the proposed localization approach, the Kalman and extended Kalman filters use a vehicle's motion model—obtained from INS—and the sequential measurement—obtained from RSU-based localization technique—to form an estimate of the vehicle location that is better than the estimate obtained by using only one measurement (either INS or the proposed RSU-based localization) alone. The motion model of the vehicle obtained from INS, also referred to as the system process model, is expressed as follows:



INS vehicle kinematics.
On the other hand, the measurement model that is derived from the INS data can be expressed as

4.3.2. One-Dimensional Kalman Filter for Locating Distant Vehicles
As explained earlier, we divide the localization of vehicles into two regions: one in which
For the process model of the one-dimensional Kalman filter, the vehicle uses its y-location obtained from INS, which is the second element of the vector


Two distinct sets of equations describe the operation of the Kalman filter: time update (prediction) and measurement update (correction) equations. Both equation sets are applied at the kth iteration when the vehicle is moving outside the threshold area where

Meanwhile, the corresponding measurement update (correction) equations are given by
We use INS to get the current x-location of the vehicle related to the previous one which is the first component of
Recall that vehicles always enter the road through entry points as shown in our system model depicted in Figure 1. Hence, we set the initial estimate at
It is worth mentioning that using the inertial navigation system alone to get x-location will result in an accumulation of the positioning error with time. However, this is the only way we can get information about the x-location of the vehicle given that distant vehicle localization in the second stage of the framework is based on the assumption that the road width is too small compared to its length.
4.3.3. Two-Dimensional Extended Kalman Filter for Locating Nearby Vehicles
Next, we estimate the vehicle location using two-dimensional extended Kalman filter in the region in which


Unlike the system process in the one-dimensional Kalman filter which only uses the second component of





4.4. Road/Lane Boundary Adjustment Stage
The erroneous estimate of the vehicle's x-location obtained in the above stage of the framework is prone to fall outside the physical boundaries of the road. This is unacceptable for the targeted collision avoidance systems. In order to ensure that the output

Let

Substituting with

In order to determine the current lane at time instant k, we first calculate the moving average,

Second, we use the exponential weighted moving average to smooth out short-term fluctuations and prevent wrong lane determination. We calculate the exponential weighted moving average,

4.5. Framework Integration
By the end of the aforementioned four stages of the proposed framework, each vehicle has an accurate estimate of its own location only. In order to share the vehicle location of neighbor vehicles to be used for the targeted collision avoidance applications, we assume that vehicles will be using V2V communications to share their location, travel direction, and speed with the nearby vehicles. This will allow the collision avoidance system to take the appropriate action(s) to avoid a large amount of crashes and provide the vehicle driver with warnings to avoid rear-end, lane change, and intersection crashes.
Our proposed framework can be summarized as follows.
Step 1.
Each RSU broadcasts beacons at periodic time instants which contain the ID of the RSU, the location of the RSU, and the road geometry information.
Step 2.
Each vehicle determines its driving direction which can be either north (N) or south (S) every time the vehicle enters a new road, as illustrated by Algorithm 1.
Step 3.
Each vehicle determines its range to the RSU
Step 4.
Each vehicle uses the range
Step 5.
Each vehicle uses one-dimensional Kalman filter to get a refined y-location
Step 6.
Each vehicle uses two-dimensional extended Kalman filter when
Step 7.
In order to ensure that the output
Step 8.
Each vehicle broadcasts its position calculated from Step 7 to its neighbors using V2V communications.
Step 9.
Periodically repeat the above steps.
5. Simulation Results
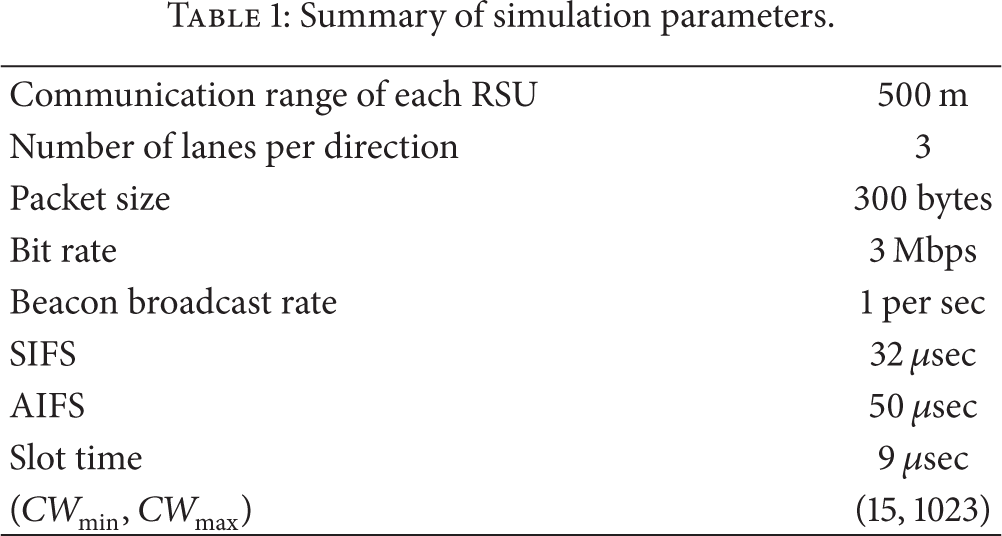
We evaluate the performance of the proposed framework using MATLAB simulations. We assume that vehicles move on a dual carriageway highway; each direction has three lanes, separated by a central reservation. The road is straight line. The length of the road is 3 km, and 3 RSUs are used; each has a 500 m communication range: south RSU (placed at
Summary of simulation parameters.
We use the root-mean-square error (RMSE) as our metric to evaluate the performance of our proposed framework. RMSE is defined as

5.1. Impact of the Curvature Error
In order to investigate the curvature error

The impact of curvature error.
In order to determine the value of the threshold to be used, we simulate our proposed framework for vehicles moving at 20 m/sec in a road with 3 km length and take the average RMSE of 20 different mobility patterns. The simulation results showed that the best threshold in which we switch from using our ranging technique with Kalman filter to using extended Kalman filter for only INS data is 70 m at each side of the RSU which corresponds to the minimum RMSE. This threshold value is used for the rest of the paper.
5.2. Localization Accuracy
As we discussed earlier in Section 2, some localization techniques only obtain the vehicle location along the road length (y-dimension), such as the one-RSU-based [9] and the RSU-assisted [8] localization techniques, and others obtain the vehicle location in both the x- and y-dimensions, such as GPS-standalone, faulty-free [7], and GPS/INS integration techniques. Hence, we divide our comparisons into two parts: one that evaluates the accuracy of the vehicle location in the y-dimension only and the other that evaluates the vehicle location in both x- and y-dimensions.
5.2.1. Localization Accuracy along the Road Length
Here, we evaluate the localization accuracy of
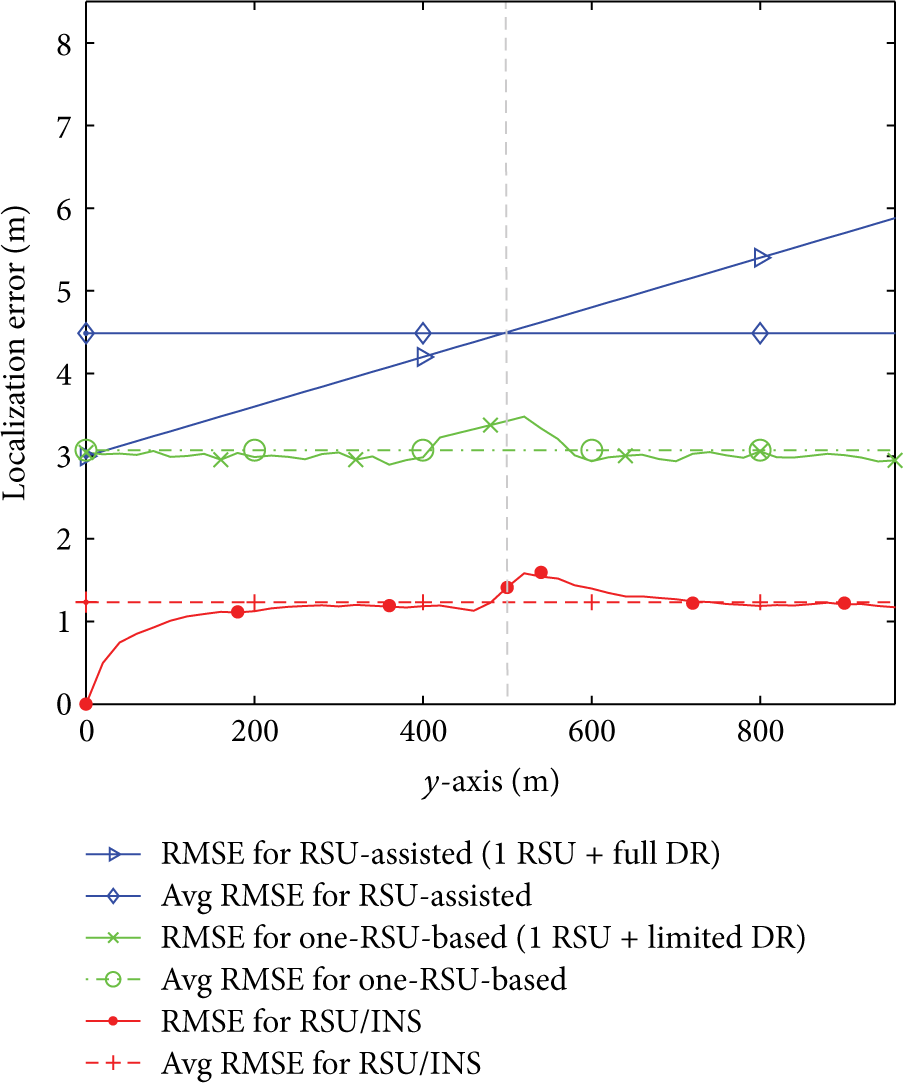
Accuracy of y-location
Recall that the one-RSU-based localization technique only uses dead reckoning in a limited distance around the RSU while RSU-assisted localization uses dead reckoning, all the way after knowing the initial position, obtained from V2R communication and RSU's location. Hence, the localization error unboundedly increases with travel distance in the RSU-assisted localization technique [8] (which uses one RSU and uses full dead reckoning all the way). Meanwhile, the localization error of the one-RSU-based technique [9] (which uses one RSU and uses partial dead reckoning) increases when the vehicles move inside the threshold area around the RSU which is mainly due to the use of dead reckoning only inside the threshold area. On the other hand, the localization error of y-location
5.2.2. Localization Accuracy along Both Road Dimensions
In order to estimate the localization accuracy of our proposed framework for the two-dimensions x and y of the vehicle location
As shown in Figure 9, the average RMSE of our proposed framework is 1.82 m compared to the average RMSE of GPS/INS localization and GPS-standalone technique which are 4 m and 6 m, respectively. Hence, our proposed framework improves the vehicle location by 54.5% and 69.67%, respectively. Figure 9 also shows that even though our approach uses only one RSU for localization, it provides better accuracy compared to the faulty-free localization technique which uses two RSUs. More specifically, our proposed RSU/INS framework improves the vehicle location by 39.33% compared to RMSE of the faulty-free localization technique.

Accuracy of vehicle-location in both x- and y-dimensions.
It should be noted that the accuracy of the proposed framework depends on the regular deployment of the RSUs on one side of the road. If one RSU is temporarily not available, for example, due to failure, the vehicle will use only INS to update its location. In such a scenario, the achieved localization accuracy might be not robust enough to be used for collision avoidance applications but can be used by less sensitive applications such as routing, Internet access, and data dissemination protocols.
5.3. Impact of Measurement Errors
Next, we investigate the impact of the standard deviation of the range measurement error

The impact of the range measurement error on
5.4. Performance under Different Mobility Patterns
Here, we illustrate the performance of the proposed framework for different mobility patterns. First, we consider three vehicles moving on 3 km single carriageway with three-lane highway with three RSUs installed 1 km apart. Each vehicle stays in its lane for the entire road without changing lanes. One vehicle is traveling in the first lane (
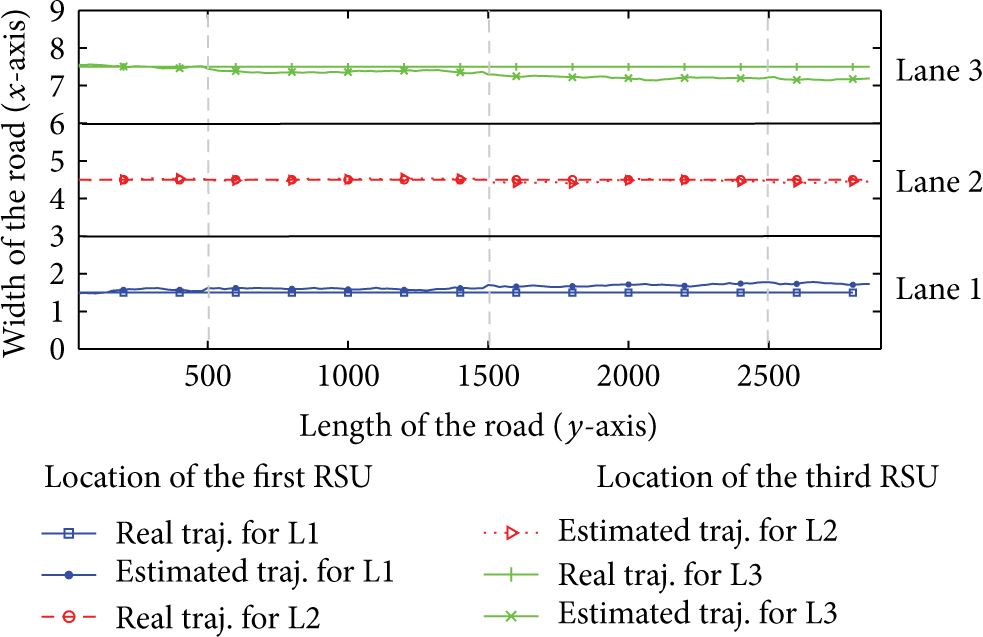
Real and estimated trajectories of the x-location for three vehicles moving in the first, second, and third lanes after applying the road and lane boundaries.

The vehicle localization accuracy of a vehicle moving in a random pattern.
5.5. Impact of Traffic Density
Finally, we investigate the impact of changing the traffic density on our proposed framework. Unlike GPS-based techniques, which use messages transmitted from GPS-satellites, our proposed framework uses RTS/CTS handshake messages with RSUs to get the vehicles' locations. These RTS/CTS handshake messages cause time delay to get the vehicle location after receiving beacons from the RSU which is mostly caused by the random backoff mechanism. As the traffic density increases, more vehicles are to exchange RTS/CTS messages with the RSU, and, hence, more collisions are to be encountered. Consequently, the vehicles will wait more time before communicating with the RSU as the traffic density increases. We measure such an increase in the experienced localization delay for different traffic densities. As shown in Figure 13, the average delay increases almost linearly from 1.4 msec to 31 msec as the number of vehicles increases from 1 vehicle/lane/km to 20 vehicles/lane/km. As we mentioned earlier, RSUs broadcast beacons every 100 msec. Hence, all vehicles—even under high density scenario—can update their locations with a maximum latency of 100 msec. This means that our framework does not only achieve high localization accuracy but also satisfies the latency requirement (less than 100 ms) in VANET DSRC safety messages.

The impact of traffic density.
6. Conclusions
In this paper, we have proposed a GPS-free vehicle localization framework that only relies on RSUs deployed only on one side of the road. Hence, our proposed framework decreases the required number of RSUs and hence the cost, compared to existing localization schemes which use multiple RSUs for vehicle localization. The proposed framework integrates the RSU-based localization information with the local inertial navigation system information via different Kalman filters to significantly improve the accuracy of vehicle localization. Our simulation results show that the accuracy of our GPS-free localization framework does not only significantly outperform the localization accuracy of GPS-based localization techniques but also outperform the existing GPS-free localization approaches—despite the use of a single RSU for localization. Consequently, our proposed GPS-free localization framework is most suitable for smart road applications that require high localization accuracy such as collision avoidance applications.
Footnotes
Notations
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.