
Abstract
Biologically inspired modeling techniques have received considerable attention for the realization of robustness, scalability, and adaptability with simple local interactions and limited information. Gene Regulatory Networks (GRNs) play a central role in understanding natural evolution and development of biological organisms from cells. In this paper, we employ GRN principles and propose a new GRN model for self-organizing control of Wireless Sensor Networks (WSNs) with dual aims of energy saving and delay guarantee. Through this scheme, each sensor node schedules its state autonomously according to the controlled gene expression and protein concentration of the proposed GRN model. Simulation results also indicate that the proposed scheme achieves good performance in meeting delay requirements and conserving energy in WSN systems.
1. Introduction
Biologically inspired systems have attracted extensive attention for solving scalability and adaptability issues while guaranteeing system robustness with individual simplicity [1–3]. Due to the properties of biological systems, much attention has been paid to employing genetic mechanisms for designing Wireless Sensor Networks (WSNs), in particular for self-organizing network. Concepts and principles derived from biological systems, such as immune system [4, 5], insect colonies [6, 7], activator-inhibitor systems [8, 9], and cellular signaling systems [10–13], have been applied to WSN system design.
Among them, Gene Regulatory Networks (GRNs), a representation of genes/proteins and the interactions between them, have been proposed for robust network design [14, 15]. GRN systems possess some attractive properties, like robustness and resilience to failures in WSNs. GRN topology has been used to determine node locations to achieve robustness and resilience to node failures [16]. A GRN model was proposed to solve the issue of optimal coverage in WSNs [17]. In specific, the nonlinear differential equation model of GRN was used to identify the minimum number of sensors required for maximum coverage in WSNs. The nonlinear differential equation based model was proposed to emulate the evolution process of genes in GRNs for self-network configuration [18]. In [19], the authors proposed an embedded controller that offers every sensor the ability to regulate its sampling rate based on its data and its neighbors’ behavior and shared information. In [20], the authors showed how a GRN-inspired controller can be used to configure submarines robots. In [21], the authors proposed the use of the attractor theory in GRN to achieve a fault-tolerant WSN routing. However, these GRN-inspired approaches have difficulty in predicting a desired behavior from local interactions of individual nodes. Rules for local interactions have not been designed to generate a specific desired behavior for mission-critical applications [22]. Thus, the individual behavior with local interaction does not always guarantee application-specific global requirements.
To address this issue, we propose a GRN model for self-organizing control of WSNs, which aims to automatically schedule node states according to the environmental changes and the application-specific requirements. We develop a theoretical model for robust node scheduling design using GRN framework. Dynamics of the proposed model automatically drive system performance to meet a specific application requirement while minimizing energy consumption among nodes under dynamically changing network condition.
2. Fundamentals of GRNs
In recent years, much research work has been reported on computational modeling of signal transduction and developmental genetic networks. These networks have been modeled in a variety of ways. For a single cell, the expression of a gene with autoregulation can be described by the following differential equations [19]:

For a multicell organism, it is necessary to consider external factors, transcription factors diffused from other cells, and interactions between cells into the GRN model. In [20], the authors suggested a generalized GRN model that considered diffusion of transcription factors among the cells:

3. GRN-Based Scheme for Self-Organizing Control
We denote the expression level of g as an internal state of sensor node and that of p as the probability of being active state:

In order to consider consumed energy level and application-specific requirement, we introduce
For WSN system, each sensor node stores its own gene expression and protein concentration. A sensor node exchanges the level of g with its neighboring nodes and a sink node piggybacks the difference between the measured delay and the delay requirement in an ACK (acknowledgement) message. When a sensor node detects its neighbor, it will receive the protein emitted from that neighbor and reevaluate p and g.
According to the proposed GRN model, the gene expression g represents the local environmental state of a node in WSNs. In specific, the expression level of the gene of a node is determined by its consumed energy level and protein concentration. As the consumed energy level of a node is larger than the averaged value across its neighbors or the protein concentration increases, the level of gene becomes smaller and vice versa. The concentration of protein is determined by the gene expression level and external factors, that is, delay requirement of an application and transcription factors diffused from other nodes. As the measured delay is larger than delay requirement or the expression level of gene is larger than the average across all the neighbors, the protein concentration increases and vice versa.
Figure 1 shows plots of inhibition function

(a) Inhibition function
In our proposed scheme, each sensor node balances two objectives: one objective is to reduce the energy consumption as provided inside the gene expression, and the other one is to guarantee delay requirement and balance the gene expression with each other via diffusion. According to the proposed model, gene expression
Consequently, the decreased protein concentration and lower
4. Simulation Results
In order to evaluate the performance of our proposed algorithm, we develop a simulation environment using the MATLAB simulator. The simulation area is 100 m × 100 m and the transmission range is 40 m. We use a uniform grid topology, where the entire network is divided into equally shaped grids, and the sensor nodes are deployed uniformly. All source nodes generate packets in a Poisson distribution with an average packet arrival rate of one packet per second. Each packet is 100 bytes and the controller time slot duration is one second. We set the channel capacity to 200 kbps. The transmitting power and sleeping power are set to 24.75 mW and 15 μW, respectively. According to the stability conditions, we set
Figure 2 shows the trajectories of protein concentration, delay and the averaged active nodes ratio, and consumed energy ratio for two different delay requirements,

Time-series plots of protein concentration for different delay requirements.
Also, we observe that the average delay successfully converges to each delay requirement as shown in Figure 3. The stricter delay requirement brings the higher protein concentration and probability to be active state, which leads to more frequent packet transmission in order to meet the delay requirement. This causes the different active node ratio and consumed energy ratio for different delay requirements.
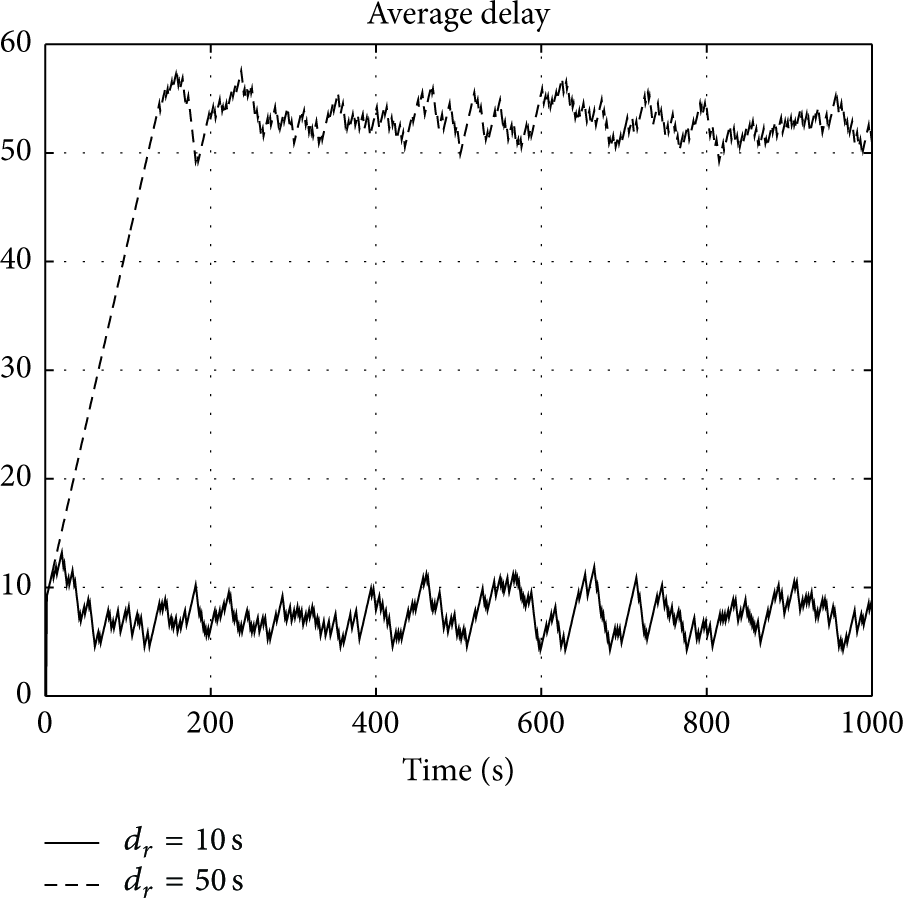
Average delay for different delay requirements.
Figure 4 validates the point mentioned above that when the delay requirement becomes looser, the active node ratio slightly decreases and power consumption ratio becomes lower, resulting in energy saving.

Averaged protein concentration, active node ratio, and consumed energy ratio.
Figure 5 shows the averaged behavior of the proposed scheme varying delay requirements. Figure 5(a) illustrates the average delay and we observe that our proposed scheme successfully controls the average delay according to the varying requirements.

Average performance varying delay requirements: (a) delay, (b) active node ratio, and (c) consumed energy ratio.
Figure 5(b) shows the active node ratio for different delay requirements. As the requirement becomes looser, the number of nodes to be active decreases, which leads to energy saving. Figure 5(c) verifies the point mentioned above that when the delay requirement becomes looser, the energy consumption ratio becomes lower.
We investigate the effects of control parameters on the convergence speed. We measure the convergence time of our proposed scheme varying control parameters η, a, κ, and c. The convergence time is determined by the total number of iterations until reaching an equilibrium point.
Figure 6(a) illustrates the convergence iteration varying control parameters, η and a. We set

Convergence performance varying control parameters: (a) convergence iteration with
Figure 6(b) shows the convergence iteration and protein concentration varying control parameters, κ and c. We set
5. Conclusions
In this paper, we have presented a self-organizing control scheme for WSNs based on the GRN model. We represent the coordination problem of on-off cycles of wireless sensor nodes by modifying gene regulation dynamics of multicellular mechanisms.
Considering the measured delay and energy consumption, the proposed scheme controls the expression level of gene and the concentration of protein in order to guarantee delay requirement while achieving energy balancing among sensor nodes.
In the future, we will provide performance analysis for the large-scale networks. Also, we plan to extend our research to the identification of optimal control parameters.
Footnotes
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Acknowledgment
This research was supported by the GRRC program of Gyeonggi Province (GRRC SUWON 2014-B4).