
Abstract
Underwater Sensor Network (UWSN) is a representative three-dimensional wireless sensor network. Due to the unique characteristics of underwater acoustic communication, providing energy-efficient and low-latency routing protocols for UWSNs is challenging. Major challenges are water currents, limited resources, and long acoustic propagation delay. Network topology of UWSNs is dynamic and complex as sensors have always been moving with currents. Some proposed protocols adopt geographic routing to address this problem, but three-dimensional localization is hard to obtain in underwater environment. As depth-based routing protocol (DBR) uses depth information only which is much more easier to obtain, it is more practical for UWSNs. However, depth information is not enough to restrict packets to be forwarded within a particular area. Packets may be forwarded through multiple paths which might cause energy waste and increase end-to-end delay. In this paper, we introduce underwater time of arrival (ToA) ranging technique to address the problem above. To maintain all the original advantages of DBR, we make the following contributions: energy-efficient depth-based routing protocol that reduces redundancy energy cost in some blind zones; low-latency depth-based routing protocol that is able to deliver a packet through an optimal path. The proposed protocols are validated through extensive simulations.
1. Introduction
Underwater Sensor Network (UWSN) is a representative three-dimensional wireless sensor networks. It was recently proposed for oceans exploration, submarine tracking, and marine rescue [1–4]. The key motivation of deploying UWSNs is sampling high-precision underwater information. How to deliver data from an underwater source node to a surface sink node, namely, routing protocols, is one of the most important and fundamental problems among many research issues in this promising field.
General land-based wireless sensor networks (WSNs) employ wireless radio for communicating. Sensor nodes are mostly stationary. In contrast, sensor nodes in UWSNs are usually equipped with a low bandwidth acoustic modem and various sensors like a pressure sensor [5]. A large number of sensor nodes are dropped into certain waters of interest as shown in Figure 1; they can communicate with each other using acoustic and move as a group with water currents in a random speed between 3 and 6 km/h [6, 7]. Some sink nodes (or single) are floating on the surface, they are equipped with both acoustic modem to communicate with underwater nodes and wireless radio modem to communicate with other sink nodes or other communication infrastructure, like a base station on land or satellites.

Common architecture of UWSNs.
Propagation delay is sensitive in some application scenarios like underwater rescue or underwater real-time data acquisition. Also, delay in a reasonable range can be tolerated in some scenarios like long-term marine data sampling or marine geography research. UWSNs for long-time oceanographic research are much more sensitive to energy rather than transmission delay. Comparing with land-based WSNs, UWSNs have a wide range of special challenges. First of all, bandwidth of acoustic communication is limited to 40 km·kbps in deep water [3]. The propagation speed of sound in water is up to 1500 m/s, which is five orders of magnitude lower than that of radio. Secondly, underwater sensor nodes are mostly stateless and are moving with water currents, which leads to a high dynamic network topology. Most existing WSNs routing protocols are based on topology information. They are certainly not proper for UWSNs in view of huge overhead for updating topology information. Thirdly, energy of underwater sensor nodes is more precious than land-based sensor nodes. It is inconvenient and expensive to recharge underwater nodes as the environment is much harsher than terrene.
Routing protocols for land-based WSNs like proactive or reactive routing protocols (OLSR [8], AODV [9], etc.) rely on topology information and employ flooding to discover and maintain routes, both of which result in underlying energy consumption and network collisions. Geographic routing is stateless which is proper for UWSNs. Next hop is mainly determined by localization in geographic routing. However, localization is another big challenge in UWSNs [10]. Getting three-dimensional coordinates of underwater nodes is not an easy task. In addition, underwater nodes have always been moving. Periodical localization is imperative, because it is expensive and takes a long time to converge. There are some localization-based routing protocols for UWSNs, like VBF [6], FBR [11], SBR-DLP [12], and so forth. They all assume that each underwater node is aware of its own three-dimensional coordinates. Although the performance of some protocols is relatively superior, drawbacks of underwater localization cannot be avoided in practical applications.
Depth-based routing protocol (DBR) [13] only requires depth (one-dimensional) information for routing. With pressure gauge equipped, underwater nodes can be aware of accurate depth all the time [7]. Deeper nodes forward packets to shallower nodes greedily. As all underwater nodes in the network send packets by broadcasting with an omnidirectional acoustic channel, one-dimensional information is not enough to prevent packets from being forwarded by multiple paths. Although DBR protocol uses a holding time function to distinguish forwarding priority of candidate forwarders, there are also some blind zones left. Consequently, the same packet may be forwarded by large number of redundancy nodes. DBR has a better time efficiency in multiple-sink scenarios. If a packet reaches any sink, DBR assumes it can be delivered to the destination sink via ratio channels. Obviously, more sinks bring in more cost. If we can find out a better solution to provide the same end-to-end latency with single sink, cost for multisink maintenance is saved. To solve these problems, we introduce time of arrival (ToA) technique to depth-based routing protocols. Using underwater ToA to achieve distance is proved to be feasible [10, 14–16]. With ToA ranging technique, we can get the distance between source nodes and candidate forwarders. The distance is an effective parameter to restrict redundancy. To reduce propagation latency, we assume sinks are able to network-wide broadcast its position. With ToA ranging between the sink and each node, we propose a novel protocol to deliver a packet through an optimal path. Extensive simulation shows that proposed protocols improve both energy and time efficiency while maintaining a high success delivery ratio.
The remainder of this paper is organized as follows. In Section 2, selected related work is reviewed. In Section 3, we completely analyze the underlying problems in current DBR protocol. In Section 4, an energy-efficient depth-based routing protocol and a low-latency depth-based routing protocol are proposed. We present extensive simulation results in Section 5. Some conclusions and future work are summarized in Section 6.
2. Related Work
In the past decade, routing protocols for WSNs have become a research hot spot. Many high performance protocols have been proposed, such as AODV [9]. However, in underwater scenarios, existing protocols have many imperfections which make them not applicable for UWSNs. Routing protocols for land-based WSNs are conventionally divided into three classes: proactive routing, reactive routing, and geographic routing. We will brief these protocols and analyze their advantages and disadvantages in UWSNs.
2.1. Land-Based Routing Protocols
Proactive routing protocols, such as DSDV [17] and OLSR [8], rely on packet flooding for route discovery. When network topology changes, every node must be notified by flooding. It will take a long time to converge and huge limited energy will be wasted as well. On the other hand, each pair of nodes which keeps a route with each other is not necessary in UWSNs. Reactive routing protocols, such as AODV [9] and DSR [18], are more suitable for dynamic topology sensor networks. These protocols also rely on systematic flooding for route initialization and maintenance. Large time delay of routing construction is one of the drawbacks of reactive routing protocols. As speed of acoustic is much slower than radio, time delay is hundred times larger in underwater environment and even leads to routing failure.
Comparing with the protocols, geographic routing protocols have many advantages in underwater applications. General geographic routing protocols are stateless [19]; that is to say, they are not sensitive to topology changes. Sensor nodes do not care about detailed information of their neighbour nodes. Every sensor node is aware of its own location and following the predefined three-dimensional geometry rules to determine whether to forward a received packet or not. According to different locations, geographic routing protocols make arrangement for forwarding priority in order to discover an optimal route.
2.2. Geographic Routing Protocols for UWSNs
Many geographic routing protocols have been proposed for UWSNs. Vector-based forwarding protocol (VBF) [6] is one of the earliest. A vector is defined from a source node to a surface sink node. Routes of each packet are guided by this vector. Routing pipe is the space within a range of W to the vector; nodes in this pipe will participate in packet forwarding. Nodes closer to the vector or sink node have a higher forwarding priority. A predefined equation is used to calculate a holding time and a shorter holding time means a higher forwarding priority. Holding time can be evaluated as

Focused beam routing protocol (FBR) [11] is another geographic routing protocol for UWSNs. Like VBF, FBR assumes that every node in the network has its own location information, and every source node has the location of sink nodes. Every source and forwarder are regarded as a torch. Nodes inside the section of focused beam are considered as candidates of next hop. θ is a predefined parameter; source node multicasts a request to send (RTS) packet to its neighboring nodes. Every neighboring node calculates whether itself lies within a cone of angle
Sector-based routing with destination location prediction (SBR-DLP) [12] is a location-based routing protocol. Sink node can be moving in this protocol. Unlike VBF and FBR having multiple nodes as relay nodes, every transmitter in SBR-DLP tries to find out the best relay node to forward the packet. Data packets are forwarded hop-by-hop instead of end-to-end. In order to find a best next hop, a node S will broadcast a Chk_Ngb packet with its current position and packet ID inside. All the neighbor nodes that receive the packet will check whether it has a shorter distance away from destination than node S. Nodes which meet this condition will reply to node S with a Chk_Ngb_Reply packet. Now S has all the information of candidate neighbours; it then figures out the best forwarder and broadcast to all its neighbours. Only the best candidate acts as the forwarder of next hop.
All the geographic routing protocols above have their advantages and disadvantages, but they all share the same assumption that every node is aware of its own position all the time. Periodic distributed localization of mobile nodes is expensive and takes long times to converge. Although the performance of some protocol is relatively superior, drawbacks of localization cannot be avoided in real applications. Accurate localization in UWSNs is another problem left to be solved. Fortunately, three-dimensional location information is not required in depth-based routing protocol (DBR) [13]. In DBR, only depth is taken into consideration to discover routes. Every node forwards packets from deeper nodes to shallower nodes. When a sensor node C receives a packet from node F, like VBF, node C will calculate a holding time according to a predefined equation as follows:

DBR fundamentally settled problems of localization in UWSNs. But it also introduces some new shortcomings. As all sensor nodes in the network send packets by broadcasting with an omnidirectional acoustic channel, one-dimensional information is not enough to prevent packets from being forwarded by multiple routing paths. Consequently, the same packet may be forwarded by large number of redundancy nodes. DBR has a better performance in multiple-sink scenarios. Some performance parameters, like end-to-end delay, are unsatisfactory in single-sink scenarios.
3. Problems in DBR
The most striking difference between DBR and other geographic routing protocols is that three-dimensional information is not required. Depth information is adequate for route discovery. But it is not to say all the problems are perfectly solved.
To a geographic routing protocol, the most critical problem is how to restrict packets to be forwarded in an optimal zone. Taking VBF for instance, only nodes in the routing pipe have the permission to forward packets. In Figure 2(a), node A is out of the routing pipe; even if it receives a packet from the source node, it will not forward it as well. Without three-dimensional information, it is difficult to limit packets to be forwarded in a particular zone in order to prevent flooding.
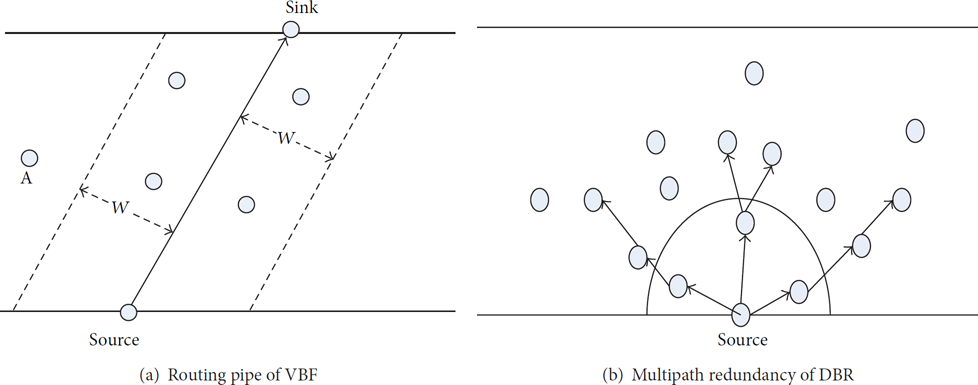
Forwarding models of VBF and DBR.
This problem have already been noticed in [13] where the idea of DBR is originally proposed. They present a solution to solve this problem. They add two data fields into packets, Sender ID and Packet Sequence Number, to make every packet unique. So every sensor node forwards the same packet at most one time. It is a common and trivial method. What is effective is that they use a holding time to schedule packet forwarding. The holding time is calculated based on depth difference between the sender node and the receiver node. Greedily, DBR tries to select the receiver node with the minimal depth to have the highest priority to forward the packet. This packet has two effects, one is data delivery and the other is to notice other neighbor nodes; this packet has been forwarded. If a node is holding to forward the same packet, it will cancel the task. In this way, redundancy is reduced to some extent. Moreover, this protocol has a perfect success delivery ratio.
As is mentioned above, every geographic routing protocol restricts packets to be forwarded in an optimal zone. In DBR, this zone is episphere of the omnidirectional antenna coverage which is a default maximum range (shaded area in Figure 3(a)). With only depth information, no more restriction can be done. DBR is a greedy protocol; sensor node with the highest priority will interdict forwarding of all the other sensor nodes in its transmission range. Unfortunately, some blind zone is left (nonshaded area in Figure 3(b)). Sensor nodes in blind zone cannot receive the packet during their holding time. So they will forward packets as scheduled.
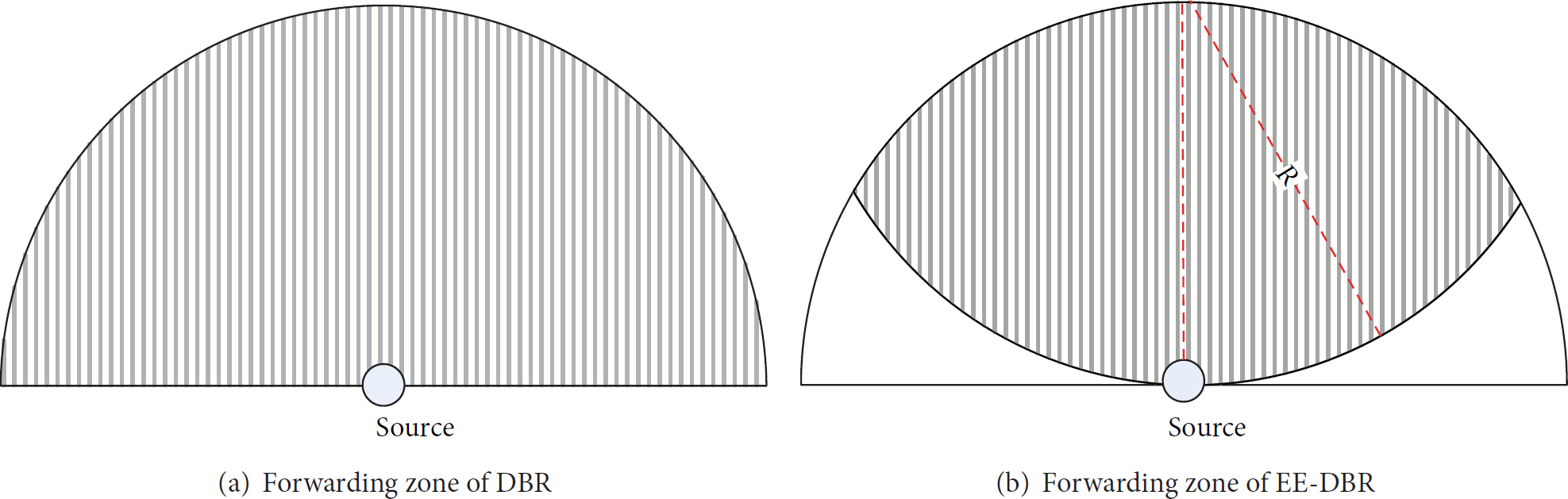
Forwarding zones of DBR and EE-DBR.
Intuitively, sensor nodes in blind zones are much closer to the transmission edge. Forwarding by sensor nodes in blind zones will result in the spread of flooding in a horizontal trend, as shown in Figure 2(b). Sensor nodes in blind zones not only have no position advantage but also can cause a lot of redundancy forwarding as well. The best way is to stop sensor nodes in blind zones from forwarding packets. But it is critical to determine whether a node is in blind zone or not with only depth information.
In original DBR protocol, each packet is greedily upward forwarded no matter whether there is a sink node floating on the surface above. If there is no sink above, all the previous efforts are wasted like Path A in Figure 4. Even an efficient routing recovery protocol may reset the route; transmission delay will improve greatly. We may call this situation sink-missing. In multisink scenarios, probability of sink-missing is relatively small. But more sinks bring more cost and more complex to collect and process the data. Multisink deployment is yet another problem in terms of the monitoring area and other parameters. If a routing protocol could direct a packet via an optimal path to the sink node, as Path B shown in Figure 4, hop numbers and transmission delay may reduce to an ideal level.
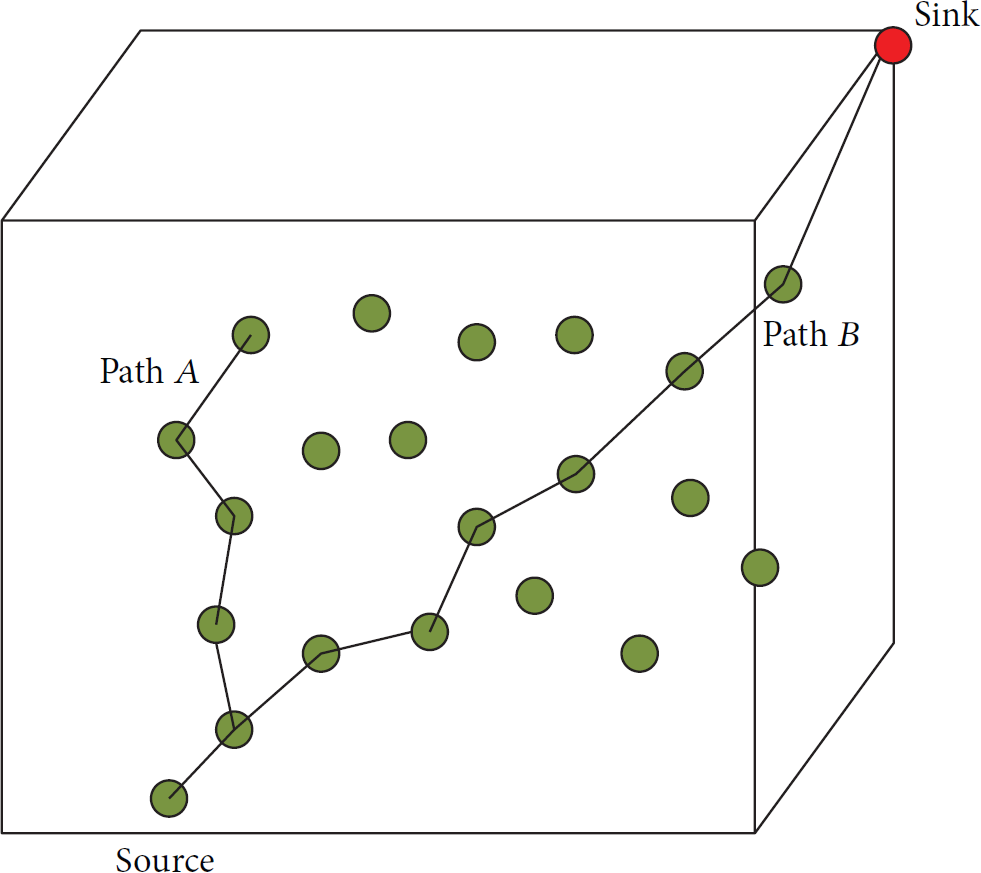
Direct a packet via an optimal path towards the sink.
In underwater environment, no three-dimensional information and no extra packets transmission cost, it seems there is no other available method to be employed. Fortunately, using ToA to achieve distance between two sensor nodes is proved to be feasible in underwater environment [10, 14, 20]. With the help of ToA, we will propose two new depth-based routing protocols in the following section.
4. Improving Energy and Time Efficiency of DBR
In this section, we firstly brief basic idea of ToA ranging technique. With the help of ToA, we mainly proposed an energy-efficient depth-based routing protocol, EE-DBR, and a low-latency depth-based routing protocol that is able to direct packets to be forwarded via an optimal path, D-DBR. Then we summarize advantages of our protocols in the end of this section.
4.1. ToA Ranging Technique
ToA is one of the simplest ranging techniques; it measures the distance between two nodes by propagation time of a data packet. Precise time synchronization is an indispensable assumption. Distance is proportional to the propagation time of a packet from one sensor node to another. If

ToA is widely used in ranging as speed of light is stable when propagating in the air. In UWSNs, speed of sound is not a constant but a function of temperature, salinity, and depth [21]. However, ToA is still a possible and practical approach for underwater ranging [15] and range-based localization [16]. Also, low sound speed is beneficial for reducing ranging error [22]; high-precision time synchronization is not required.
4.2. EE-DBR: An Energy-Efficient DBR Protocol
As mentioned in the last section, EE-DBR protocol focuses on how to reduce multipath redundancy forwarding. Redundancy is sometimes necessary in a sensor network to improve robustness. Definitely, it is not the more the better. Our protocol just finds out an optimal trade-off between energy cost and network robustness. As analyzed in last section, we have to stop sensor nodes in blind zones (nonshaded area in Figure 3(b)) from participating in forwarding. To determine whether a node located in blind zones or not, we use ToA ranging technique as a support.
Figure 5 is a basic geometric model of EE-DBR protocol. ToA ranging technique can be used to get distance between two nodes. Though speed of underwater sound is a fusion of temperature, salinity, and depth, researchers usually chose a constant speed of 1500 m/s for simple [23]. Consider


Geometric model of EE-DBR protocol.
In this way, EE-DBR can eliminate redundancy energy cost of sensor nodes in blind zones.
4.3. D-DBR: A Directional DBR Protocol
In original DBR protocol, each packet is greedily upward forwarded. If there is no sink above, all the previous efforts are wasted. We may call this situation sink-missing. In multisink scenarios, probability of sink-missing is relatively small. But in single-sink scenarios, many performance indicators significantly decreased [13]. In this section, we propose a directional depth-based routing (D-DBR) protocol that can direct packets to be forwarded via an optimal path towards the sink. This protocol aims to reduce hop numbers and propagation delay in single-sink scenarios.
In D-DBR, we assume that the sink node is able to network-wide broadcast its position periodically. Sink nodes are floating on the surface, and they usually have larger volume to hold batteries than underwater nodes. It is also more convenient to recharge sink nodes. So it is feasible to assume that sinks have more energy for broadcasting information. Also, many commercial acoustic modems have a long transmission range to support the assumption like AM-OFDM-S1 [24] which has a transmission range up to 4 km. Consider



As shown in Figure 6, the source node A has two candidate forwarders, node



Geometric model of D-DBR protocol.
In the case of (6) being satisfied,
To sum up, we implement directional depth-based routing in this way. Extensive simulation results will be presented in Section 5.
4.4. Summary
In summary, EE-DBR and D-DBR employ ToA ranging technique to redefine the forwarding protocol of original depth-based routing protocol. Key advantages of EE-DBR and D-DBR are summarized as follows.
4.4.1. EE-DBR
(i) Energy Efficiency. Energy consumption can be effectively reduced in EE-DBR. Additional ToA ranging technique needs no extra packet transmission. Essential information for ToA ranging can be encapsulated in existing payloads.
(ii) High Scalability. With the network density increasing, EE-DBR can reduce much more energy compared with DBR protocol. In other words, energy consumption of EE-DBR is not sensitive to network density and has a high scalability.
4.4.2. D-DBR
(i) Low End-to-End Delay. D-DBR directs a packet to be forwarded in an optimal path towards the sink. In one-sink scenarios, it can maintain a low end-to-end delay.
(ii) High Success Deliver Ratio. D-DBR maintains a satisfactory success delivery ratio in single-sink scene.
Extensive simulations will be presented in the following section.
5. Simulations
In this section, we first adopt the method of polynomial fitting to compensate ToA ranging results. Then we evaluate the performance of EE-DBR and D-DBR comparing with DBR.
5.1. Simulation Setup
Our simulation is implemented on Aqua-Sim [25]. Aqua-Sim is a UWSN simulation extension package based on NS-2 [26]. In the simulation, sensor nodes are randomly deployed in a 500 × 500 × 500 three-dimensional underwater area. Single sink is deployed in the middle of the surface. Speed of sound in underwater environment is set to be 1500 m/s. All underwater nodes move randomly in a speed between 1 m/s and 3 m/s The direction is also random and periodically changed. The sink node is stationary once deployed. One of the underwater sensor nodes is set to be the source node. Without loss of generality, depth of source node is fixedly set to be the max depth, 500 m, and moves randomly in this plane. Most underwater communication parameters are according to those of a commercial acoustic modem UWM1000 [27]: bandwidth is 10 kbps; maximal transmission range is 100 meters. Energy consumption of sending is 2 watts, receiving is 0.1 watts, and idling is
We proposed two protocols in this paper. EE-DBR mainly focus on energy efficiency and D-DBR mainly focus on time delay in single-sink scenarios. So total energy consumption and average end-to-end delay are two key metrics. Another key metric is success delivery ratio which is defined as the ratio of the number of distinct packets delivered to sink node(s) to the number of distinct packets generated by the source node.
5.2. ToA Ranging Compensation
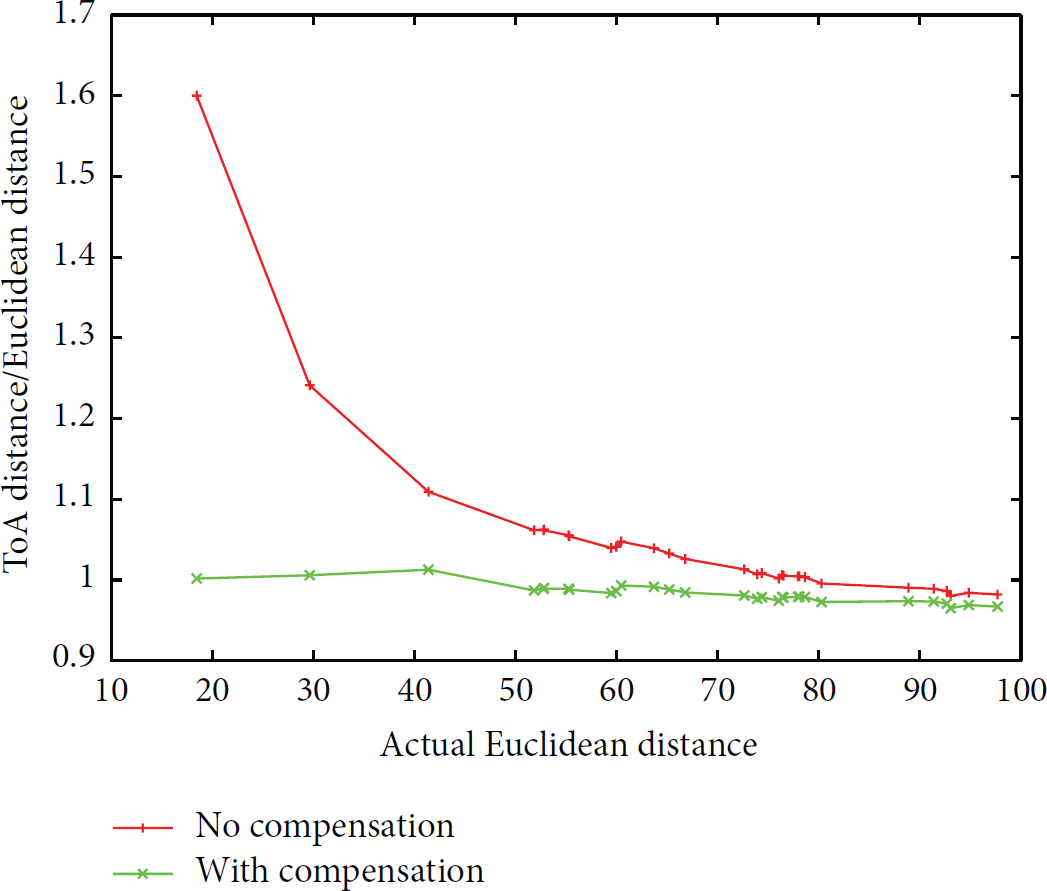
In ToA ranging technique, distance is not strict direct proportion to time of arrival. In general, short distance has a larger ratio of ToA ranging distance to the real distance because of the synchronization error. To obtain a more accurate distance, we have to compensate the result of ToA ranging. In Figure 7, we can see that when distance is longer than 40 m, ratio of ToA distance to Euclidean distance approaches
Compensating the error of ToA ranging.
We use polynomial function fitting method to reduce ToA ranging error. We sampled thousands of ToA ranging results between 10 and 100 meters and used a quadratic equation to be the objective function, because the quadratic equation has a better trade-off between calculation complexity and accuracy. Final result is shown as follows:


After compensation, ToA ranging distance is almost the same with Euclidean distance in Figure 7. As ToA ranging distance is the key parameter in proposed protocols, a feasible compensation method to reduce the error is very important.
5.3. Simulation Results
We now evaluate energy consumption of proposed protocols comparing with original DBR protocol. In Figure 8, we plot energy consumption of EE-DBR and DBR in different size of sensor nodes. We can figure out that in spare network when size of nodes is
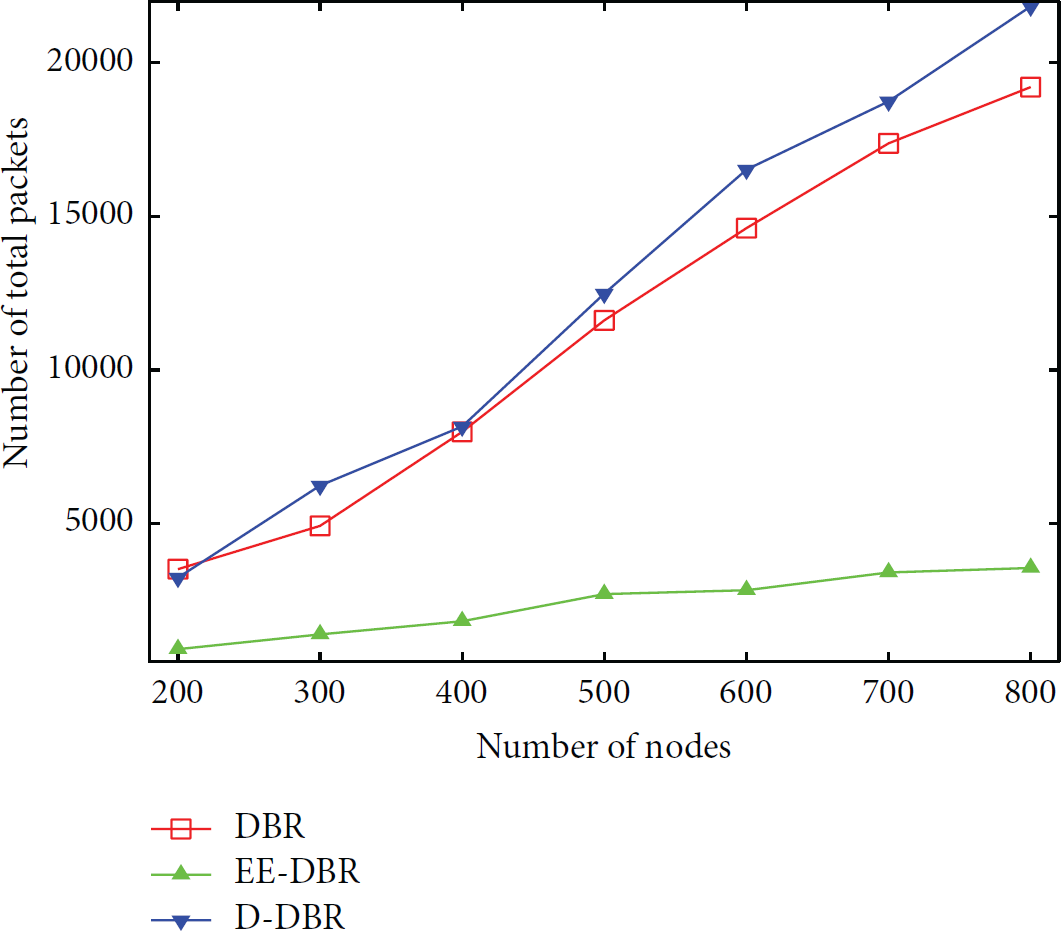
Comparison of energy consumption.
As packet delivery ratio is different in different protocols, we give a comparison of average energy cost for each delivered packet. The value of average energy cost for each delivered packet is total energy consumption divided by the number of packets that is successfully delivered in different protocols. Results are shown in Figure 9 which has an identical trend as Figure 8.
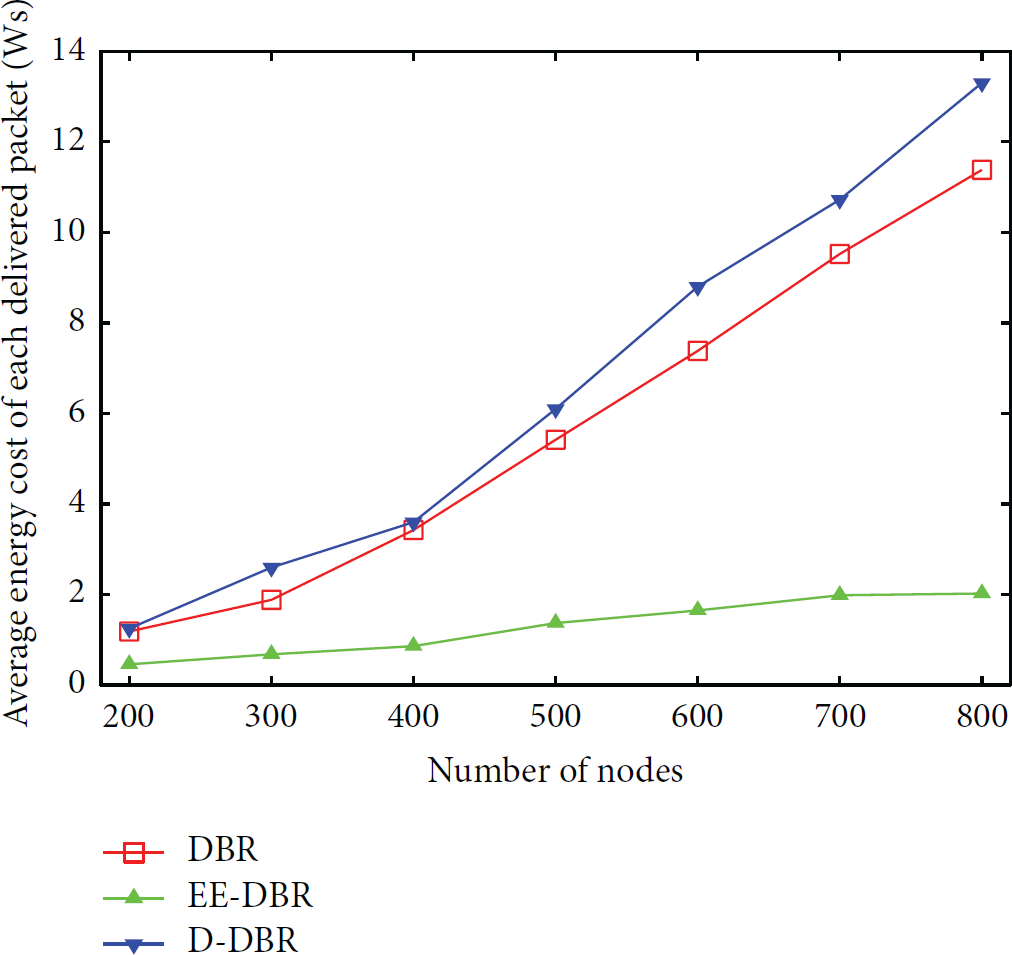
Comparison of average energy cost for each delivered packet.
Figure 10 shows how average delay for each delivered packet changes with number of nodes increasing. In the simulation,

Comparison of average delay for each delivered packet.
Figure 11 shows how success delivery ratio changes with the number of nodes increasing. Delivery ratio of EE-DBR is lower than original DBR, that is because forwarding elimination in blind zones introduces a higher probability of routing failure. Despite all that, success delivery ratio of EE-DBR can reach 90% when number of nodes is larger than 400. Success delivery ratio of D-DBR is almost the same as DBR in both sparse and dense network.

Comparison of success packet delivery ratio.
5.4. Summary
As presented above, two proposed protocols have a superior performance compared to original DBR protocol. EE-DBR reduces energy consumption dramatically while it keeps a higher success delivery ratio in dense network. D-DBR reduces at most 36% end-to-end delay while it keeps the same success delivery ratio as DBR.
In energy-sensitive scenarios, like long-time marine data sampling, EE-DBR is a better choice. In time-sensitive scenarios, like marine rescue, D-DBR provides a better performance.
6. Conclusions and Future Work
In this paper, we mainly focused on improving both energy and time efficiency of depth-based routing protocol and proposed two novel protocols, EE-DBR and D-DBR. We creatively employ underwater ToA ranging technique to DBR protocols. Taking full advantage of ToA ranging technique, EE-DBR significantly reduces energy consumption from multipath forwarding redundancy by at most 81.5% while it keeps a high success packet delivery ratio (average 88.8%), and D-DBR reduces end-to-end delay by at most 36.2% while it keeps an average success packet delivery ratio of 98.3% which is even better than DBR. In energy-sensitive scenarios, like long-time marine data sampling, EE-DBR is a better choice. In time-sensitive scenarios, like marine rescue, D-DBR provides a better performance.
In future work, our studies will be extended in two directions: one is further improving performance of the two protocols, like success delivery ratio in EE-DBR and more optimal coefficients in holding time equation of D-DBR, and the other is trying to combine EE-DBR and D-DBR into a new flexible routing protocol.
Footnotes
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Acknowledgment
This paper is supported in part by National Natural Science Foundation of China (NSFC) under Grants nos. 61303245 and 61173132. The authors alone take responsibility for the content of this paper.