
Abstract
Underwater acoustic communication channel is time varying and has Doppler effect due to wind, sea surface roughness, and platform motion. We have to recognize the changing channel state and apply it to communication technique for increasing transmission efficiency in the underwater acoustic channel. In this paper, we propose more reliable Doppler estimation method based on frequency average and remodulation. We conducted the simulation and sea trial to evaluate the performance of the proposed method. When the channel coding technique was not applied, the uncoded bit error rate performance of the proposed method was improved about maximum 50.3% compared with conventional method.
1. Introduction
Underwater sensor networks (USNs) can be used for environment monitoring, disaster prevention, and military surveillance [1, 2]. Unlike terrestrial communication, underwater acoustic communication utilizes sound waves. The sound speed, which is slower than radio waves, is dependent on the water temperature and the salinity. The sound transmission path is changed by refraction according to the gradient of vertical sound velocity [3]. When sound waves are passed through the underwater, they are affected by attenuation, reflection of bottom and surface, scattering, ambient noise, and the Doppler effect caused by movement of the transmitter and the receiver. Of these factors, the Doppler effect affects the correlation time of the channel related to the transmission efficiency [4, 5]. These influences thus cannot be neglected in the design of underwater acoustic communication systems. To increase transmission efficiency, we need to estimate the changing Doppler frequency and compensate for distortion.
In practice, several Doppler frequency estimation techniques have been used for underwater acoustic communication [6, 7]. One uses a bank of the matched filter which corresponds to the different Doppler shift frequency [8]. The received signal is passed through the matched filters, and then the Doppler shift frequency is obtained according to the matched filter branch that has the highest energy. In this method, the accuracy of the estimated value is dependent on the number of matched filters. But increasing the number of matched filter also increases the complexity of this method. Another approach to measuring the Doppler-induced frequency offset is performed in the frequency domain. The received signal is converted to the frequency domain and the received carrier frequency is estimated. However, this method is difficult to use as the carrier frequency estimation requires a high signal-to-noise ratio, and the computational load increases when obtaining a high resolution in frequency domain [7]. Another uses the time difference of arrival between the preamble and postamble signals [9, 10]. The time difference of arrival is compared to the period of the transmitted packet to estimate the Doppler shift ratio. However, this method should be used in an environment with a fixed Doppler shift between preamble and postamble signals. The other uses a sample correlation to generate the frequency offset estimate. The frequency offset can be estimated by complex multiplications. As such, this method has a low computational complexity but does not perform well for low signal-to-noise ratios. Moreover, the above methods are not suitable for use in the time-varying channel environment.
In this paper, we propose Doppler shift frequency estimation methods to use in the time-varying channel. Two kinds of methods are proposed. One is a Doppler estimation algorithm that has stable performance as a part of the communication system. From an overall communication system perspective, the other is a demodulation scheme that is different from the conventional communication system. There are differences between the conventional communication system and the proposed system. First, the conventional communication system uses a Doppler estimation method based on samples correlation [11]. This estimation algorithm exploits only one correlation lag. As such, the estimated value can be sensitive to variation in correlation. On the other hand, the proposed system uses the frequency average estimation, which is based on multiple sample correlations. Because the frequency average estimation uses all correlation lag, the estimated Doppler frequency can maintain the consistency even if there is a variation in correlation. Second, the conventional communication system simply demodulates the payload based on the estimated Doppler frequency in the training sequence section and for this reason is sensitive to time-varying channel. However, the proposed system can estimate the channel parameters such as Doppler frequency during the data frame and improve the communication performance.
We present the ambiguity function and decision-directed estimation. We also propose a more accurate Doppler estimation method that is based on decision-directed estimation and propose a remodulation method that can update the channel parameters for the equalizer operation and estimate the Doppler frequency during the data frame using two Doppler estimation techniques. A simulation based on the Bellhop modeling and sea experiment was carried out to compare the performance of the proposed method with a conventional nonrecursive Doppler estimation.
The remainder of this paper is organized as follows. Section 2 presents the Doppler estimation technique based on ambiguity function which is using Doppler estimator at first, and Section 3 presents proposed Doppler estimation based on the previous method for second Doppler estimator and proposes the remodulation method. In addition, we present the frame formation and receiver structure for the remodulation method. Section 4 applies the proposed method to the simulation and experimental data. Finally, Section 5 gives a summary and conclusion.
2. Doppler Estimation Technique Based on Ambiguity Function
The ratio between signal propagation speed and the source relative velocity is defined as the Doppler shift frequency [12]. When the Doppler shift frequency is Δ, the signal with Doppler shift frequency can be expressed as follows:





Structure of correlator-bank.
3. Proposed Methods for Doppler Estimation
In this section, we propose two techniques for improving communication performance in the Doppler environment. One is the Doppler estimation method which is less sensitive to variation than previous methods. The other is the remodulation method, which can estimate the varying channel parameter during the data frame.
3.1. Decision-Directed Estimation Based on Frequency Average
Assume the modulation is PSK (phase shift keying) with perfect timing synchronization [13]. The received signal after matched filtering is given by




The

3.2. Frame Formation for Remodulation
In a conventional communication system, the communication packet consists of training section and data frame (or payload) section [14–16]. When a training section in which transmitter and receiver are already known is received, the training signal is used to update the equalizer tap coefficients for recovery of the distorted signal through multipath propagation. This is also used to estimate the Doppler frequency. However, after training mode is finished, the difference between the estimated value and the actual value is increased, and this is caused by time variance of the channel. These channel variances reduce the reliability of communication. For this reason, we should continuously estimate and compensate the Doppler frequency during data frame. In a conventional communication system, the payload is only demodulated using the estimated channel parameters such as equalizer tap coefficients and Doppler frequency in the training section. By comparison, the proposed remodulation method is able to estimate the varying channel parameter during the payload.
The basic idea is as follows. The received payload is divided into several data frames called recursive data frames. The first recursive data frame is demodulated using the estimated channel parameters at the training section. Then, the demodulated data frame is remodulated. The remodulated first recursive frame is used like a training signal for demodulation of the second recursive frame. This process is repeated. Figure 2 shows the proposed method.
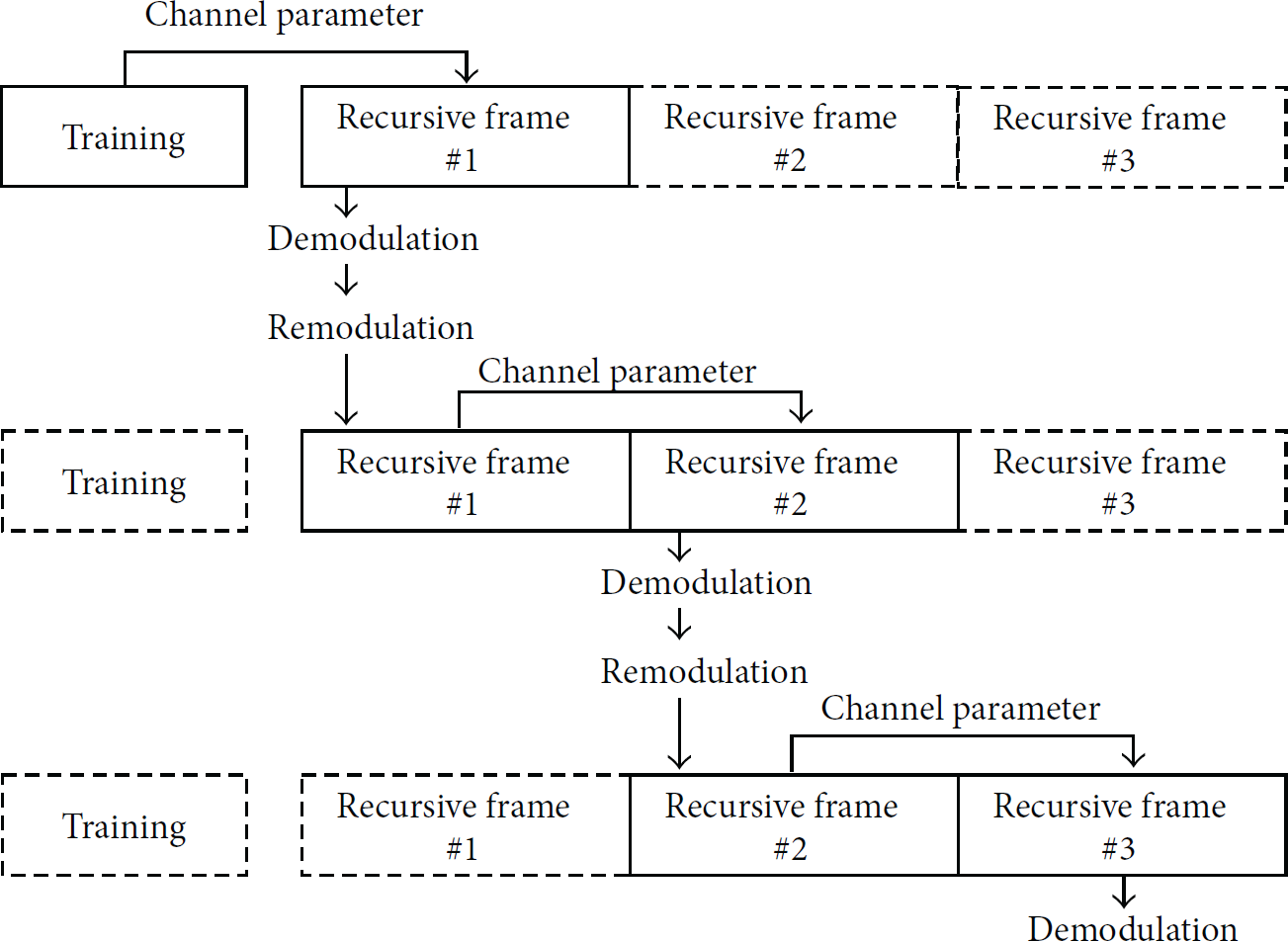
The proposed remodulation method.
3.3. Receiver Structure
We present the receiver structure based on PSK (phase shift keying) in Figure 3. There is a buffer at the entrance of the receiver. An amount of the received signal equal to the recursive frame size is saved into the buffer. The lever behind the buffer is raised toward the buffer after the training signal and initial first recursive data frame are entered into receiver. Therefore, we assume that the receiver knows the training length and recursive frame size for operating the lever. There are other buffers in the receiver. One saves the training sequence, and the other is used for saving the demodulated recursive data frame. The receiver consists of frequency estimators, matched filter, PLL (phase locked loop), DFE (decision feedback equalizer) based on RLS (recursive least square) algorithm [17], and remodulator. The receiver operating order is as follows.
The training sequence is modulated and then consists of correlator-bank with different Doppler shift replicas. The coarse Doppler frequency of the received training signal is estimated at the first frequency estimator. The received signal is downconverted with the estimated frequency. The downconverted signal is passed through the matched filter and sampled to symbol interval. Second Doppler frequency estimation and recovery are conducted on the symbol spaced signal. The distorted phase of signal is recovered by PLL. The signal distortion caused by multipath propagations is removed by DFE. The equalizer outputs are passed through the hard decision. Data symbols other than demodulated training symbols are saved into the recursive frame buffer. The levers are raised toward recursive frame buffer. Recursive data symbols at recursive frame buffer are used like a train sequence. ①~⑨ procedure is performed.
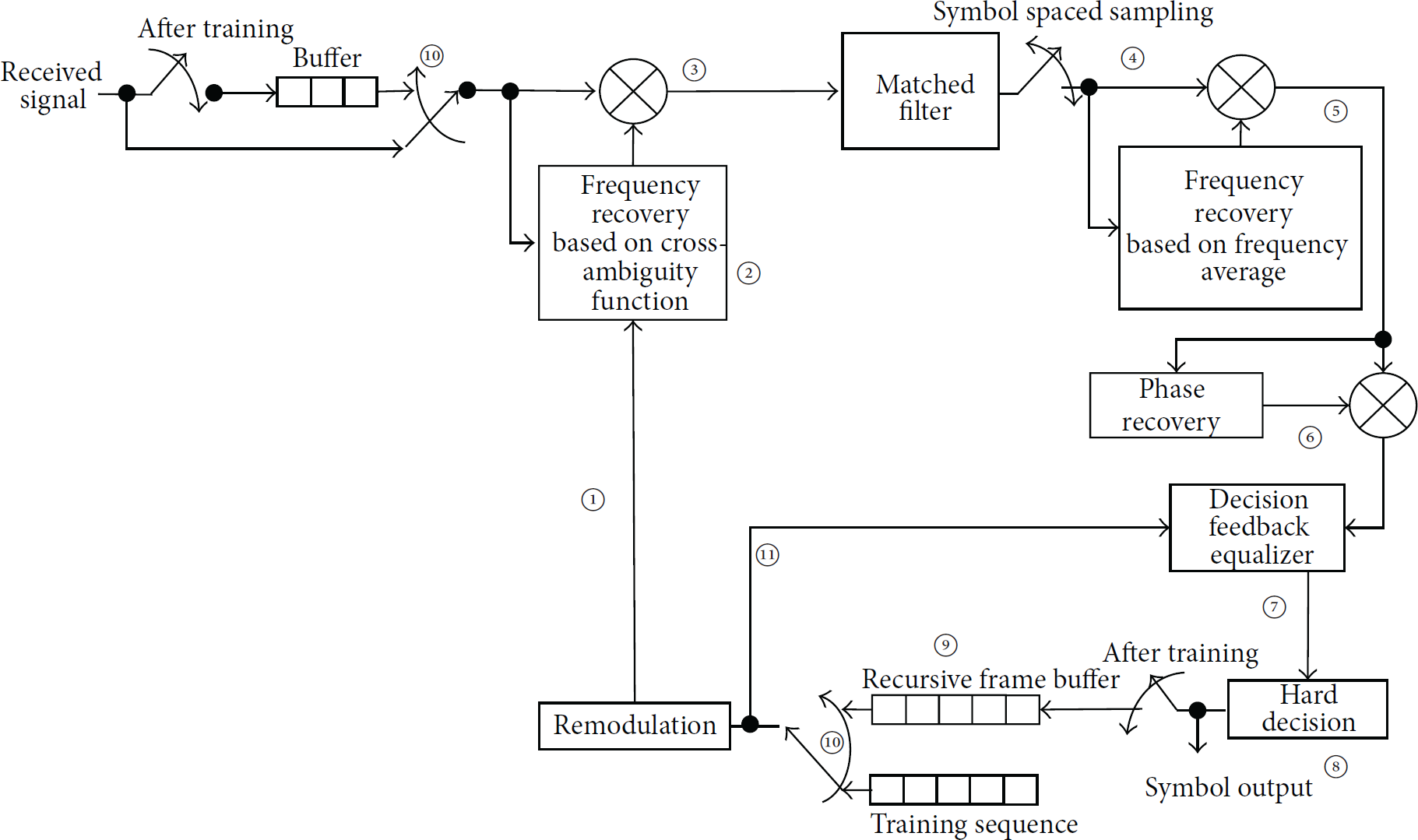
Receiver structure.
The above procedure is an example of a payload which is divided into two recursive data frames. If the number of recursive data frames is increased, the number of buffers at the entrance of the receiver is also increased.
4. Simulation and Experimental Results
4.1. Simulation
Before communication performance was evaluated, we examined the difference between the second Doppler estimation techniques. At environment with the Doppler effect, we estimated the Doppler frequency using both first estimator and second estimator. When 8 Hz Doppler frequency existed, assumed frequency offset was already calculated at the first Doppler estimator. Therefore, the estimated value of the second estimator is zero in the ideal case. However, simulation results show that this estimation has an error. Because we use training symbols at (6), the product of the received symbol with noise and complex conjugate training symbol makes an error as a symbol amplitude difference between those symbols. This being so, variance of estimation is large in a low SNR environment. We can show the difference between the two cases in Figure 4 that is result of a simulation for 100 times. Overall, the proposed method had an averagely small frequency offset error and narrow deviation. At 5 dB, the standard deviation of the previous method and the proposed method was 0.0245 and 0.0108, while the mean value of the previous method and the proposed method was 0.0757 and 0.0291, respectively. Both deviation and mean error of the proposed method are smaller than in the previous method.

Estimated frequency offset at second Doppler estimation: (a) previous method, (b) proposed method.
We executed the simulation using VirTEX (Virtual Time series Experiment) [18] based on the Bellhop to evaluate the performance of the proposed remodulation method. To create the simulation environment, we used an actual sound speed profile in Korea's South Sea. We assumed that surface and bottom were flat. The bottom information for the simulation was as follows. Sound speed at bottom was 1600 m/s, bottom density was 1.23 g/cm3, and bottom attenuation was 0.95 dB/λ. The water depth was 85 m, and both the transmitter and the receiver were located at 60 m. We also assume that the 5 Hz Doppler frequency occurred. Figure 5 shows the sound speed profile, eigenrays, and channel impulse response.

Simulation channel characteristic, (a) sound speed profile, (b) eigenrays, and (c) channel impulse response.
Source signal was modulated to QPSK. Bit rate was 1 kbps and carrier frequency and sampling frequency were 16 kHz and 192 kHz, respectively. We disposed of the 0.2 sec silence between training section and data section to avoid delay distortion. Several parameters for communication are given in Table 1.
Parameters for simulation.

The performance regarding recursive frame length and SNR (signal-to-noise ratio) is shown in Figure 6. When recursive frame length is 1,000 symbols, the uncoded BER (bit error rate) result means the conventional communication packet method. The communication performance became improved when the recursive frame length was decreased and SNR was increased. In particular, when SNR was 5 dB, the BER of the proposed method was 3.7% lower than in the conventional method. In all SNR cases, the performance of the proposed method was better than the conventional method.

Uncoded bit error rate second Doppler estimation (a) using the previous method, (b) using the frequency average method.
We compared the performance using frequency average method at second Doppler estimator with previous estimation. When SNR was 15 and 20 dB, the two cases had similar performance. However, the communication system using proposed estimation had better performance, up to a maximum 0.4% in 5 and 10 dB cases. We can confirm that the proposed estimation method is advantageous in terms of communication reliability.
4.2. Sea Trial
We executed the experiment during June 2014 near Geoje island, Korea, to evaluate the proposed method. The setup for sea trial is shown in Figure 7. The water depth of the experimental area was about 60 m, and the transmitter and the receiver were located at 20 m and 26 m below the ocean's surface, respectively. The wind speed was 9 m/s, and wave height was 2.5 m. The ship towing a transmitter drifted because the ship's engine was turned off to avoid engine noise. Distance between transmitter and receiver was getting closer to 1 km.

Setup for sea trial.
The source signal has the same packet as described in Table 1. The carrier frequency is 5 kHz and sampling frequency is 25 kHz. Channel coding is not applied to the signal. Before transmitting the communication signal, we got the scattering function shown in Figure 8 using the modulated M-sequence. We confirmed that Doppler frequency was from 4 to 7 Hz and delay spread was about 50 ms.

Scattering function.
We got the uncoded BER in order to compare the performance of the proposed method with the conventional system. Figure 9 shows the uncoded BER per 100 bits. Since uncoded BER is cumulated, the last value means total uncoded BER. The data packet consists of 1,000 symbols (2,000 bits). Therefore, the result of 1,000 symbols belongs to the conventional data packet system. We can show that the performance of the proposed method was better than conventional method. The shorter the recursive frame length, the better the performance. In particular, when the number of recursive frames was 200 symbols, the uncoded BER was reduced to a minimum of 4.1%.
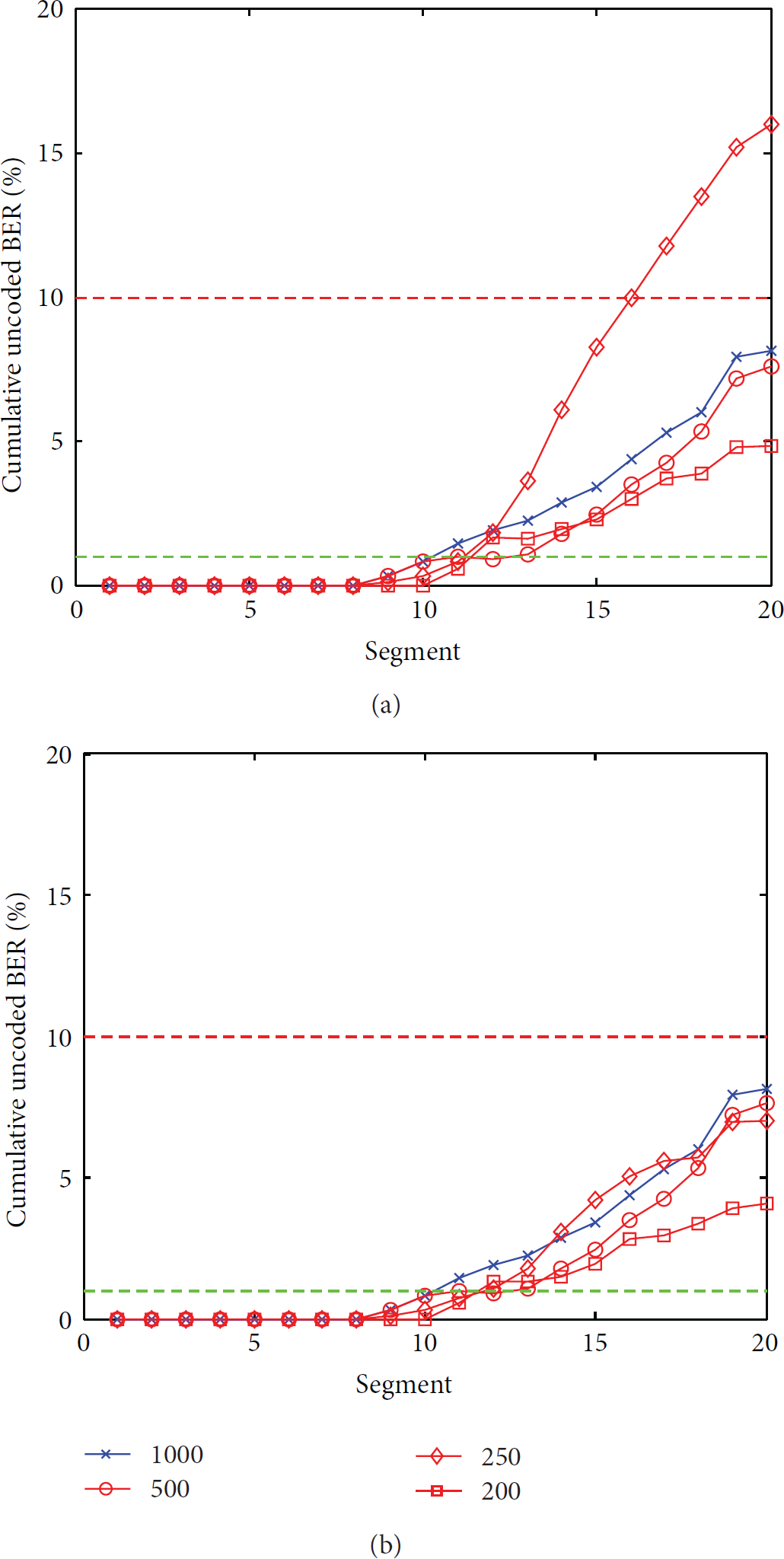
Comparison of performance by recursive frame length with second Doppler estimation (a) using the previous method, (b) using the frequency average method.
We also compared the performance using the frequency average with the previous method at the second Doppler frequency estimation. Figure 9(a) shows the uncoded BER with second frequency estimation based on the previous method. The outcomes were similar to those obtained through the frequency average method, except that recursive frame length was 250 symbols. Compared to the frequency average method, estimation frequency per frame was different at third recursive frame, which had large error. This result indicates that the performance of the communication system that used frequency average estimation is more reliable.
5. Conclusions
In underwater acoustic communication, the Doppler effect decreases the transmission efficiency and distorts the source signal. The conventional communication packet system in which payload is only demodulated using the estimated channel information in training mode is sensitive to time variance of the channel. In this paper, we proposed the more reliable Doppler estimation method based on the existing technique. We confirmed that the proposed estimation method resulted in a smaller estimation error. Furthermore, we also proposed a remodulation method that is able to estimate the time-varying channel parameter during the payload. We compared the performance of the proposed remodulation method with the conventional method in the simulation environment with white Gaussian noise and the Doppler effect. We showed that the uncoded BER of proposed method was lower than that of the conventional packet method. The communication performance became improved when the recursive frame length was shorter. We also could confirm the performance difference based on whether or not the proposed frequency average method at second frequency estimator was used. The results of the sea experiment showed the potential for an improvement in performance when the communication system used the proposed remodulation method. When recursive frame length is 250 symbols, communication performance with the previous frequency estimation method deteriorated, whereas the proposed frequency average method showed stable performance. In particular, we confirmed that the communication performance was improved by up to 50.3% using the two proposed methods.
Footnotes
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Acknowledgments
This work was supported in part by Defense Acquisition Program Administration and Agency for Defense Development under the Contract UD130007DD and by Ministry of Education and National Research Foundation of Korea (NRF) through the Human Resource Training Project for Regional Innovation.