
Abstract
In pertinence to the application of multidimensional scaling (MDS) methods in ranging-based positioning systems, an analysis is firstly conducted by the classical MDS algorithm. Modified MDS algorithm and subspace method are presented in localization application. We also depicted the unified framework and general solutions of MDS methods. However, the least square solutions under this framework are not optimal. Their performance is still related to selection of coordinate reference points. To address this problem, a minimum residual MDS algorithm based on particle swarm optimization (PSO) is proposed to derive a new solution for indoor robot localization under the unified framework. The result of analysis indicates that the performance of minimum residual MDS method is immune to selection of reference points. Furthermore, the localization accuracy for indoor robot has been enhanced by 41% as compared with the classical MDS algorithm.
1. Introduction
Location information is very significant in such scenarios as military affairs, industry, civil use, disaster relief, and so forth [1]. However, the widely used GPS system is hardly applicable to indoor environments. Wireless sensor network (WSN) has provided a new solution for accurate localization and tracking of indoor targets, but environmental interference and influence are prone to cause larger error of localization and tracking. Therefore, high-efficient algorithms are necessary to enhance localization accuracy of WSN.
Existing algorithms in wireless sensor network localization can be broadly divided into two classes: range-based and range-free. The class of range-based algorithms is required to provide the accurate distance estimation between the target node and anchor node. Moreover, range-based algorithms require each sensor node to be equipped with more powerful CPU. There are several techniques to get the 4 distance estimation: received signal strength indicator (RSSI) [2], time of arrival (TOA), and time different of arrival (TDOA) [3]. The class of range-free algorithms can reduce the energy consumption and the demands for special hardware, but their accuracy is lower than the former one, such as APIT [4] and DV-Hop algorithms. In order to improve localization accuracy, the swarm intelligence algorithms [5] are applied by the researcher to node localization. However, these algorithms need a large number of anchor nodes. With regard to this, the literature [6] proposed the distributed localization algorithm. However, how to reduce localization errors has not been considered by the distributed localization algorithm. The distributed weighted combining scheme for cooperative spectrum sensing in cognitive radio networks was developed [7, 8]. This technique can incorporate specific weights according to different channel conditions and exhibits clear advantages with respect to channel fading, low PU transmission power, low false alarm rate, and the network size variation.
In recent years, a lot of novel ideas and solutions have emerged for WSN localization. The localization technique based on multidimensional scaling (MDS), first proposed by Shang et al. [9], has offered a new idea for node localization. MDS method was widely applied in data analysis and data visualization in fields of physics, biology, geology, brain science, and social and psychological phenomenon research, as well as in pattern recognition, machine learning, and data mining, which are concerned with dimension reduction and feature extraction, and so forth [10–12]. Compared with previous localization algorithms, the MDS-based localization algorithms can simultaneously locate multiple nodes by utilizing the associated information among all nodes within the network. It can even get a diagram of relative positions among nodes while anchor nodes are unavailable. When absolute location is in need, fewer anchor nodes are required for this algorithm. Anchor nodes are also deployed without restriction. Recently, a variety of localization methods derived from classical MDS method have been applied in sensor network [13, 14] as well as cellular network [15]. The classical MDS method takes the mass centers of all nodes (including all anchor nodes and target nodes) as coordinate reference points. Thus, Cheung and So think it is inapplicable to wireless localization without prior information about the location of target nodes. Therefore, they propose a modified MDS method with mass centers of all anchor nodes as coordinate reference points [16]. At the same time, Wan et al. provide a subspace solution used for three-station positioning systems, with the locations of target nodes as coordinate reference points [17]. On this basis, So and Chan extend the subspace method to multistation positioning systems [18]. Chen et al. provide a unified framework of MDS method and its general solution for range-based localization, among which the above methods are several particular cases. In [19], a weighted MDS method under the unified framework has been obtained. However, according to the Gaussian Markov Theorem, all methods under this framework are not optimal. Their performance still depends on selection of coordinate reference points. Furthermore, although the weighted MDS method does not depend on selection of reference points, known environmental parameters, which are very difficult to obtain, are needed in the solving process.
Against the flaws and defects of the above algorithms, this paper proposes a minimum residual MDS (MinRE MDS) algorithm under the unified framework. We also provide a unified solution with minimum residual to MDS algorithms, including the classical, the modified, and the subspace-based ones. With this framework, the result of analysis indicates that the performance of the minimum residual MDS method does not depend on selection of reference points. Therefore, it does not require environmental data and can enhance the localization accuracy greatly as compared with the classical MDS algorithm.
2. Application of MDS Algorithm in Localization Systems
Given the dimension of the target space, relative positions of all objects in the space can be determined by the classical MDS method. In order to determine the absolute position of target nodes, it is required to perform rotation and translation over the matrix of relative coordinates. In this paper, we conduct theoretical analysis of three important MDS-based localization methods, namely, the classical MDS algorithm, the modified MDS algorithm, and the subspace method.
2.1. Classical MDS
For range-based localization system, the target nodes (TN) whose positions are to be determined are located at




Due to the existence of measurement noise, the distance between the target node and the ith anchor node is usually expressed as

When the classical MDS method is applied for localization in this system, detailed procedures are as follows.
Since the space encompassing the target is known, the dimension n can be determined.

Apply double central transformation to get




The coordinates obtained from Formula (9) are merely relative position of the nodes within the space. In order to obtain the absolute position of target node, transformation is required by making further use of the position information of anchor nodes. Without measurement error, there is such a relation between



Formula (12) reveals that the transformation matrix Ω is dependent on the centralized coordinate matrix
2.2. Modified MDS
The modified MDS algorithm selects the mass centers of all anchor nodes as coordinate reference points, with respect to which the coordinate matrix composed of the target node and anchor nodes can be expressed as






In 2D localization, eigen decomposition is firstly applied to matrix



2.3. Subspace-Based MDS
Unlike the modified MDS method in which the mass centers of all anchor nodes are used as the coordinate reference points, the subspace-based MDS localization algorithm takes the coordinate of target node as the coordinate reference point. The corresponding coordinate matrix can be expressed as

Construct matrix

Apply eigen decomposition to







Thus, the least square solution to this equation can pinpoint the estimated position of the target node as

3. MDS under Unified Framework
From the above analysis, it may be discovered that the difference among the classical MDS method, the modified MDS method, and the subspace method lies in selecting coordinate reference points when constructing the inner product matrix. In fact, according to the definition of inner product matrix, any point within the space encompassing the target nodes and all anchor nodes can be taken as the coordinate reference point. Namely, the coordinate reference point can be expressed as


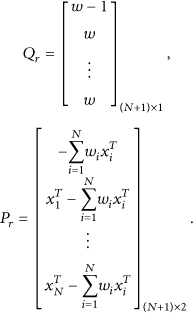
With respect to a given generalized mass-center reference point, the coordinate matrix composed of target node and anchor nodes can be expressed as



Without measurement error, the inner product matrix under the generalized mass center is






Therefore, for reference points determined by any weight vector that satisfies

Evidently, the double central transformation is a special instance of the above transformation.
Refer to the noise subspace


When there exists measurement noise, by Formula (47), the least square estimation of the target node's position can be determined as
Under the above unified framework, the proposed method may change by selecting a different weight vector W. For instance, let



4. Minimum Residual MDS Algorithm under Unified Framework
From the above analysis, it can be known that the solving process of MDS algorithm under the unified framework is actually to find the least square solution. However, the least square algorithm inevitably introduces unavoidable errors during the linearization process. To optimize the performance of MDS method, this paper proposes a minimum residual based MDS algorithm, extends MDS method to the circumstance of generalized mass center, and gets the minimum residual solution under the unified framework.
4.1. Theory of Minimum Residual Localization
The idea of minimum residual localization is to find a coordinate point within the region to be located so as to minimize the residual sum of squares of the distances between it and anchor nodes AN and the corresponding measured distances, namely, to maximize the matched degree between this coordinate point and the measured distances, and finally to take the coordinate point as the estimated position of the target.
According to what is assumed in the above experimental system, for N anchor nodes, the distance between the target node and the ith anchor node containing measurement noise errors is expressed as
According to the idea of minimum residual localization, a target function can be built:


Then, function

When

4.2. Application of Particle Swarm Optimization (PSO) Algorithm in Minimum Residual Localization
According to the above analysis, the minimum residual localization algorithm is to find the function in an unconstrained optimization problem. Consider

Given the coordinates of all anchor nodes AN within the positioning system, the measured distance from the target node TN to each AN is to be obtained in each locating cycle.
The idea of PSO algorithm is to adopt multiple particles to simulate the target's location. The updating direction of the particles will also be determined by comparing their individual optimum with group optimum. Through several iterations, the group optimum of the particle swarm is selected as the optimal solution. Assume that the number of particles is M and the maximum count of iteration is K. The PSO-based minimum residual localization algorithm works throughout the solving procedure as follows.
Step 1 (initialization).
Randomly generate particles and their initial speeds within the positioning space:

Compute the adaptive value

Meanwhile, the historical optimal solution of the particle swarm is the particle which has achieved the minimum adaptive value:
Step 2 (the kth iterative update of particles (
)).
Update the particles according to their individual historical optimal solution and group historical optimal solution:

Step 3.
Update the individual historical optimal solution and group historical optimal solution of the particles:

Step 4.
Decide whether the maximum count of iteration K is achieved.
If no, let
If yes, the initially estimated position of the target at the moment is

The dimensionality is n. In the process of initialization, the time complexity is
It has been proven that
4.3. MDS-Based Minimum Residual Localization Algorithm (MinRE MDS)
In fact, Formula (47) can be rewritten as

Postmultiply both sides of the above equation by vector





Thus, the residual vector ε of Formula (67) can be expressed as

Now, the sum of residual vectors ε makes the same physical sense as Formula (53).
Let



In order to solve the optimal position of the target, substitute
The above procedure can avoid eigen decomposition in the classical MDS algorithm, overcome errors introduced in least square algorithm as a result of linearization, and work out MDS-based minimum solution of the target coordinate.
5. Experimental Verification and Effect Analysis
5.1. Experimental Platform Construction
To verify the performance of the minimum residual MDS localization algorithm under the unified framework proposed in this paper, confirmatory experiment is implemented at Lab 104 in Science Building of Northeastern University (NEU). The whole experimental environment is arranged as in Figure 1. The environment extends a range of 10 m ∗ 6 m. The positions of the anchor nodes are AN1(8, 1), AN2(1, 1), AN3(1, 5), AN4(8, 5), and AN5(4.5, 3), respectively. The motion trail of the target, which moves 6.5 m ahead, turns right and moves 3 m ahead before continuing to turn right and move 6.5 m ahead, and starts at the point (8,1.5). The total length of the trail covered by the target is 16 m; the moving speed is 1 m/s; the sampling frequency of RSSI values is twice per second (0.5 Hz). The total sampling number is 33.

Environment deployment.
In the experiment, ZigBee nodes are adopted as anchor nodes and target node in WSN. The nodes are arranged above a tripod with the height of 1.6 m. The target node is carried above the mobile robot iRobot, as shown in Figure 2.

ZigBee nodes deployment.
5.2. Localization Result and Analysis
Iterative recursive weighted average filter [23] is adopted to process the initial measured values of RSSI, which are converted into estimated values of distance via RSSI signal attenuation model. After obtaining the estimated distances between the anchor nodes and target node, estimation of node positions can be performed.
A comparison is made between the minimum residual classical MDS method, minimum residual modified MDS method, and minimum residual subspace method under the unified framework and the classical MDS method and modified MDS method as well as subspace method under the unified framework. For the experimental environment and data at this time, the obtained result of localization is shown in Figures 3–8. According to the localization effect diagram, it can be seen that there exists a larger error within the least square MDS localization in which there exists a great deflection between the estimation result and real value, whereas the PSO-based minimum residual MDS algorithm gives significantly smaller bias in position estimation.
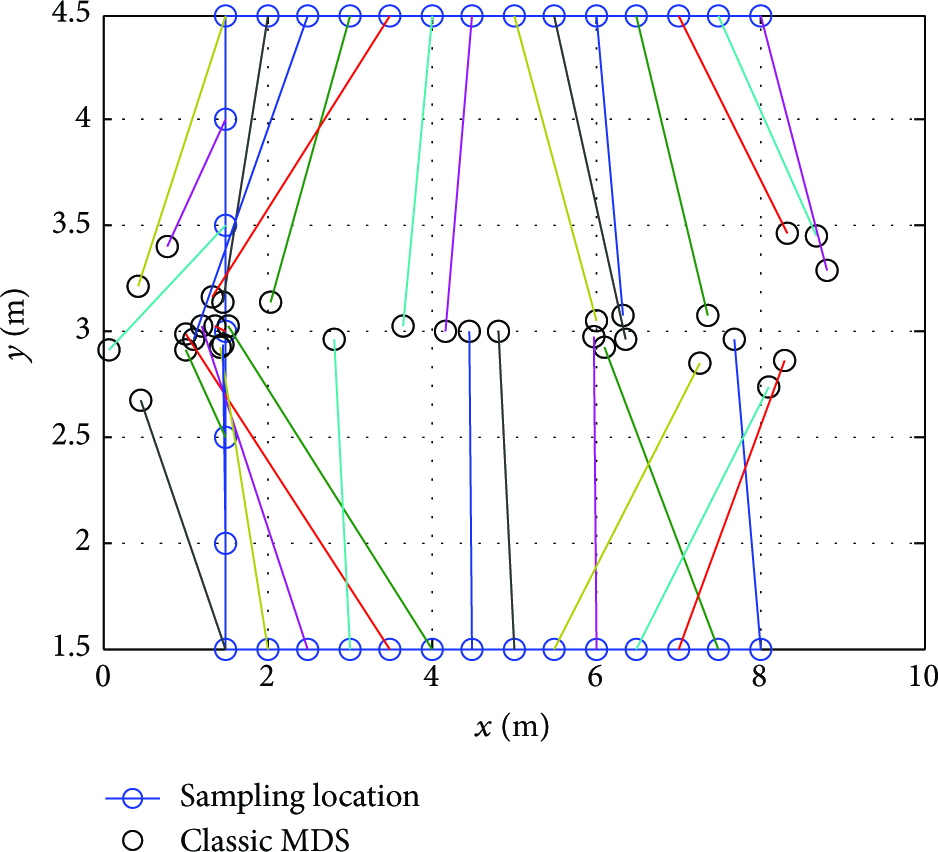
Classic MDS localization result.

MinRE classic MDS localization result.

Modified MDS localization result.
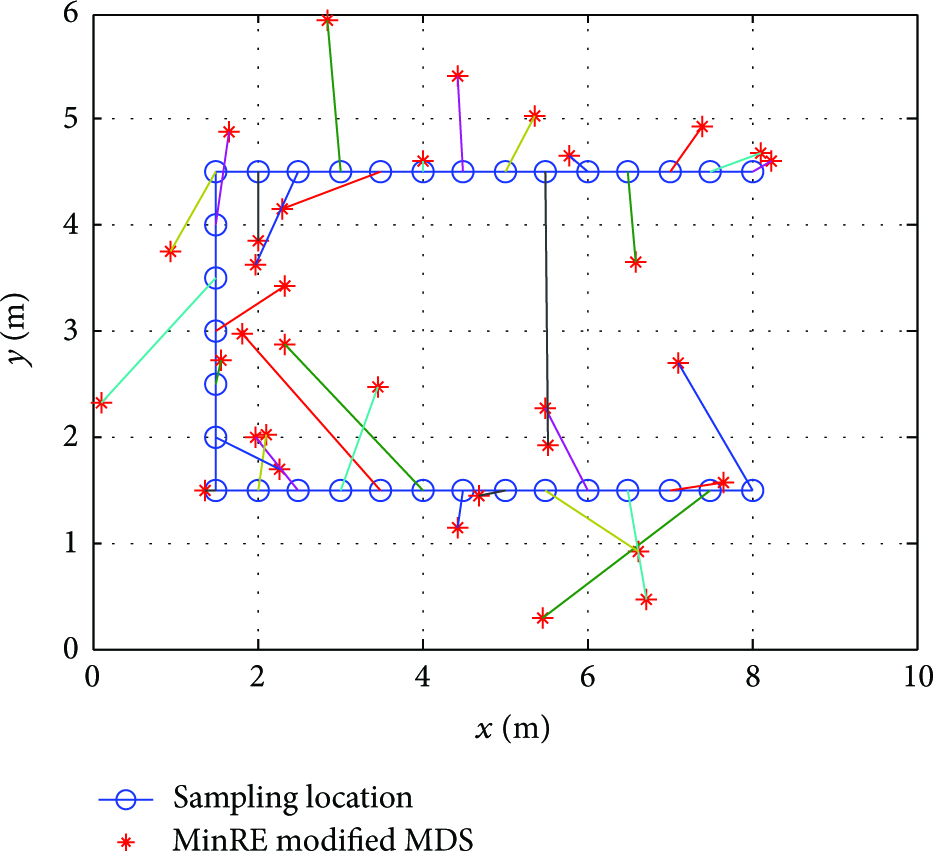
MinRE modified MDS localization result.

Subspace localization result.

MinRE subspace localization result.
Figures 9 and 10 are analysis diagrams of error statistics. It can be easily seen that the error of the PSO-based minimum residual MDS localization algorithm is significantly smaller than that of the least square MDS localization algorithm. In other words, it can achieve a more perfect effect of localization.
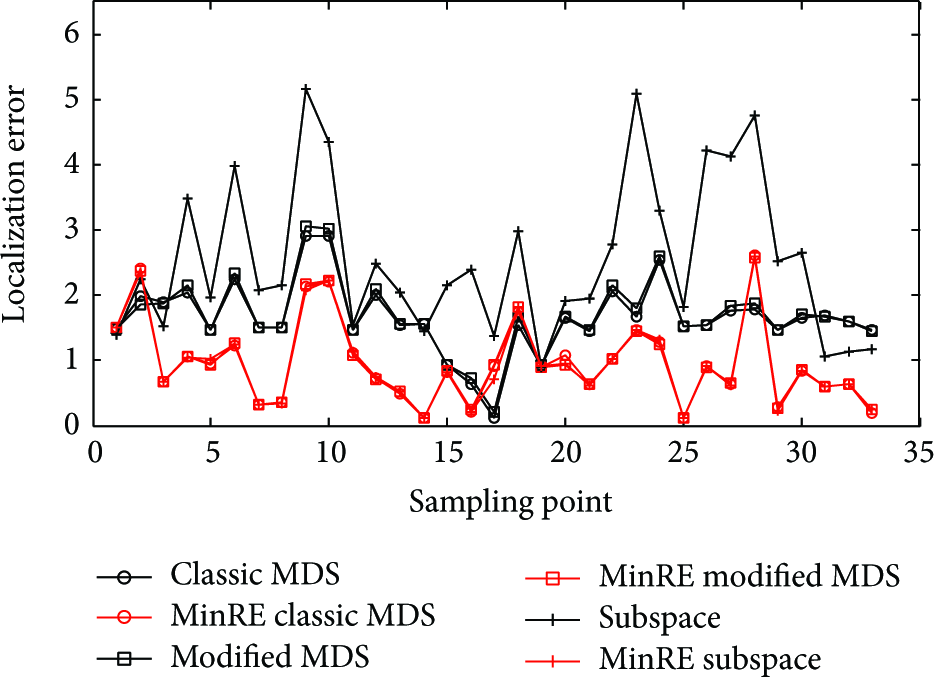
Localization error.

Cumulative distribution function.
The concrete parameter analysis of localization error is shown in Table 1, which reveals that the minimum residual MDS localization algorithm has enhanced accuracy dramatically as compared with the least square MDS. Experimental results show that the classical MDS method, modified MDS method, and subspace method under the unified framework have demonstrated different performances in accordance with different selections of coordinate reference points. However, there is not a selection scheme of coordinate reference points which outperforms the minimum residual MDS algorithm under the same reference points. The minimum residual MDS method significantly outperforms the least square MDS method, with better localization accuracy up to 41%. Furthermore, the former performance is immune to selection of reference nodes.
Localization error statistic.

6. Conclusion
In this paper, three available MDS algorithms, including the classical MDS algorithm, modified MDS algorithm, and subspace method, are analyzed. Their difference mainly lies in the selection of reference nodes. Thereby, the unified framework is used to solve MDS algorithms. On the basis of existing methods, MDS localization algorithm based on minimum residual is put forward. Its general solution is provided under the above unified framework. In order to verify the performance of the proposed algorithm, a small-scale WSN network with ZigBee nodes is adopted to implement practical experiment. Experiment results show that the minimum residual MDS algorithm proposed in this paper can effectively enhance the localization accuracy of moving target. What is more, the performance of the minimum residual MDS algorithm is immune to the selection of reference nodes.
Footnotes
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Acknowledgments
This work was supported in part by National Natural Science Foundation of China under Grant no. 61471110 and National Natural Science Foundation of China under Grant no. 61273078.