
Abstract
Nodes in underwater wireless sensor networks (UWSNs) keep moving and dispersing due to force of water flow and aquatic creatures touching, and thus some isolated unknown nodes emerge. This type of isolated unknown nodes cannot directly communicate with enough beacons in their neighborhoods, which makes localizations for them disabled or the localization error unbearable. To this end, a multihops fitting localization approach is proposed in this paper. Firstly, some intermediate nodes between beacons and unknown nodes are set as routers to construct paths via a greedy method; then, the multihop paths are approximately fitted into straight lines; finally, the positions of unknown nodes can be estimated by trilateration. The proposed algorithm is analyzed and simulated in terms of localization error and error variance, and the results are proven preferable.
1. Introduction
Water covers more than 70 percent of the surface on the earth. In order to utilize the underwater resources, there is great interest in the exploration of underwater wireless sensor networks (UWSNs). UWSNs are regarded as extension of terrestrial wireless sensor networks, and they are composed of a large number of underwater sensors. This system can collect hydrologic data such as temperature, pressure, PH value, and salinity-alkalinity and so on; hence many applications can be made such as environment management, resources protection, hazard monitoring, and military detecting [1]. These applications are usually required to learn the coordinates of sensor nodes; accordingly, localization for unknown nodes in UWSNs is very important. There are three types of nodes in UWSNs: surface buoys, beacons, and unknown nodes. The given phenomenon is observed mostly by unknown nodes and beacon nodes, which are interconnected and are in charge of relaying the data to surface sinks. The architecture of UWSNs is depicted in Figure 1.

UWSN architecture.
(a) Surface buoys are equipped with GPS systems [2]; thus they can get their coordinates easily. Each buoy communicates with the beacon nodes using acoustic transceiver periodically and then sends messages including the information of its position and so on [3]. The acoustic communication can be available even in deep underwater [4].
(b) Beacon nodes mainly give help to estimating the coordinates of unknown nodes. They usually own more energy and larger communication ranges. Every unknown node keeps listening until more than 3 position messages from beacons have been received.
(c) Unknown nodes are generally used to gather interest data and are assumed to own limited battery energy, so they usually keep silent until they hear from beacon nodes by broadcasting messages [5]; then their coordinates are estimated approximatively.
In traditional 3D underwater localization algorithms, at least four beacons are necessary to locate one unknown sensor node's position (X coordinate, Y coordinate, and Z coordinate). It is assumed that all the underwater nodes including beacons and unknown nodes are equipped with pressure sensors so that the depths (Z coordinate) of the nodes can be acquired directly by USP [6]. Then we can use three beacons to finish the localization.
Underwater sensor nodes keep moving and diffusing due to water flowing or aquatic creatures touching after they are deployed [7], what produces some isolated nodes. These isolated nodes cannot search for enough beacons in their neighboring ranges and thus the localizations are disabled. There are two kinds of methods for this problem. The first one is called AUV-aided algorithm [8, 9], in which AUV travels to an area where isolated nodes exist and then it serves as a localization reference. However, this method cannot provide real-time localization, especially in large scale UWSNs, because the number of AUVs is scarce and they move slowly; the other is multihop localization algorithm, which takes intermediate nodes between beacons and unknown nodes as routers to transmit the coordinates from beacons. This method will be adopted and improved in the remaining part of this paper.
The remainder of the current study is organized as follows. Section 2 provides a brief overview of related work. In Section 3, we propose a multihop localization algorithm for UWSNs. Section 4 gives some mathematical analysis about the scheme of our research. In Section 5, the proposed algorithm is validated by simulations in terms of localization error and error variance. Section 6 is the conclusion.
This work is the extension of our early work [10]; the main differences between the two papers are as follows. (1) The algorithm is given additional explanation and is discussed from different cases; (2) the theoretical analysis of algorithm has been improved and extended; (3) more simulations have been done and supplied.
2. Related Work
The localization schemes of terrestrial sensor networks usually use radio wave to communicate among nodes. However, the radio wave underwater can propagate a very short distance, and the fact makes the existing terrestrial localization algorithms be not suitable for UWSNs. In UWSNs, sensor nodes communicate with each other by acoustic channels because sound is the only available medium for long distance transmission underwater [11–13]. In this section, we will briefly review some localization algorithms for UWSNs.
Most localization algorithms for UWSNs can be roughly divided into two steps: (1) calculation of distance between unknown nodes and beacons; (2) implement of localization. Range-free protocols [14] and range-based protocols [15] are usually used in the first step. In [16], an improved DV-Hop localization method based on range-free is proposed, and it overcomes the bad localization accuracy. In range-based protocols, more accurate distance information is used for localization, such as Received Signal Strength Indicator (RSSI) [17], Time of Arrival (ToA) [18], Time Difference of Arrival (TDoA), and Angle of Arrival (AoA) [19]. In the second step, the most typical algorithm is trilateration [20], where the localizations of unknown nodes are supported by not less than three beacons [21]. Nevertheless, if unknown nodes cannot find enough beacons, then this algorithm will be disabled due to lacking of distance for localization.
Reference [22] applies a static path to improve the localization accuracy by considering the path of a mobile beacon and the deployment of beacons. This research suggests the determined static path provides higher localization accuracy than a random path or others, but the path interval abates localization accuracy greatly and the movement trajectory of mobile beacon nodes is almost unpredictable. In [23], authors assume a sparse UWSN where sensor nodes have poor connectivity with each other and then proposes an algorithm named Mobility Assisted MDS-MAP(P), which is based on Multidimensional Scaling (MDS). In this method, mobile sensor nodes keep moving and recording the distances to neighbor nodes at some intermediate locations, which provides extra range measurements. In [24], an Efficient Mobility Based Localization (EMBL) is proposed. During the localization process every node predicts its future mobility pattern according to its historical trajectory. The contacting with beacons is not necessary for isolated nodes due to mobility prediction. But nodes prediction has a poor accuracy when the underwater environment is extremely complex. Reference [25] employs intermediate nodes between beacons and unknown nodes as routers [26] to build a shortest path via greedy approach, as shown in Figure 2; the shortest path is approximately taken as a straight line linking unknown nodes and beacons. However, this algorithm manifests poor performance when the routers are too much. The problem of multihops localization has not been paid enough attention, and especially large error is easily produced by current multihops localization approaches. The traditional multihop localization methods using greedy arithmetic result in an unsatisfactory localization error, which motivates us to put forward the Multihops Fitting Localization Approach (MFLA).
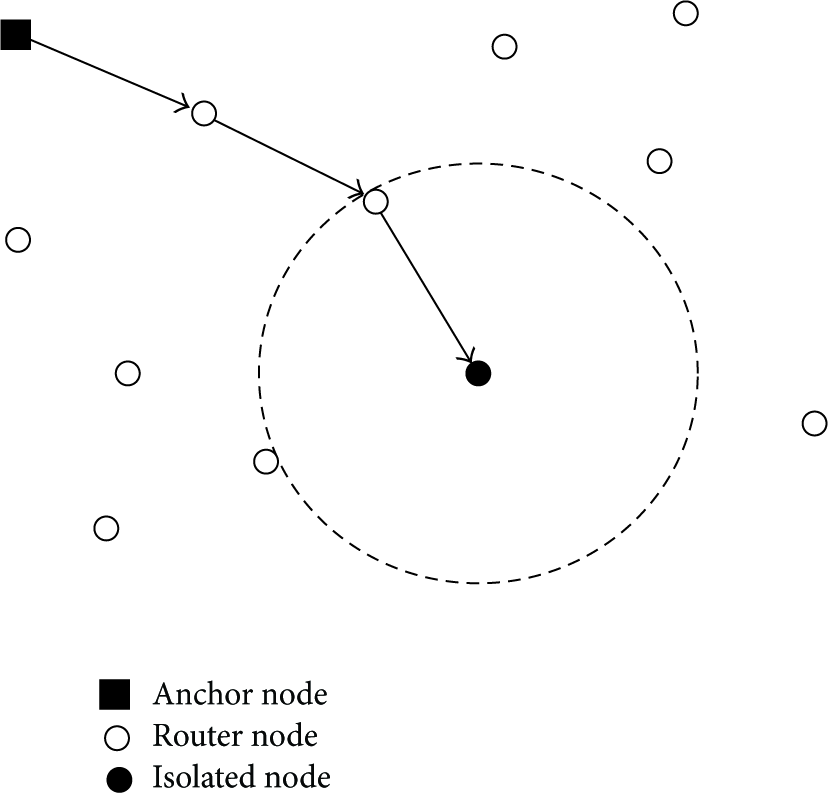
Path selection.
3. Algorithm
Suppose that plenty of sensors nodes are deployed in 3D underwater cuboid space
Each node has a rotatable acoustic transmitter and receiver. As shown in Figure 3, acoustic transmitter and receiver on nodes can rotate anticlockwise in the horizontal direction.

Rotatable acoustic transmitter and receiver.
MFLA will be executed when unknown nodes cannot find 3 neighboring beacons. Some intermediate nodes are employed to form a polygonal line from the unknown nodes to the nearest beacons; subsequently, this polygonal line is fitted (by a recursion of cosine computation) for trilateration localization. The detailed description and flowchart of MFLA are given as follows.
Step 1.
Each beacon (suppose

Step 2.
All neighboring beacons of
Step 3.
If
Step 4.
Suppose
Besides, an example for routing formation is given in Figure 5. Neighboring beacons (at least 3) will be found by a greedy method, and routing table can be produced. The path from
Structure of


Polygonal line paths.
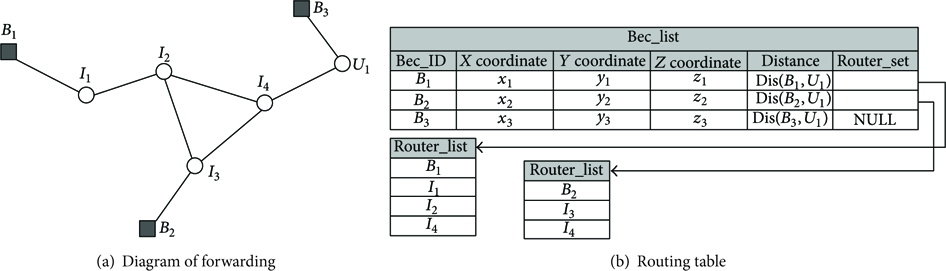
Example of routing formation.
Step 5.
A path with minimum hops from an unknown node
Case 1.
When
Case 2.
When

Computation of interior angle (
Case 3.
When

Computation of interior angle (
Step 6.
Trilateration method is applied to locate the unknown node.
The execution flowchart of MFLA is given as Figure 8.

Flowchart of MFLA.
4. Mathematical Analysis
4.1. Distance Error
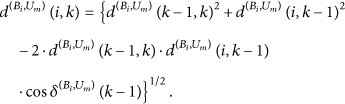
Firstly, assume that the real distance between node 
4.2. Multihops Fitting Error
The fitting error should also be discussed from the following cases.
Case 1.
When 
Case 2.
When 
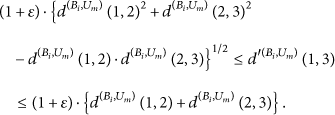
Because
Furthermore, there is 
Case 3.
When 


Case 4.
When 
4.3. Localization Error
Trilateration is the most common approach for getting a coordinate. Suppose three beacon nodes are 

5. Simulations
MFLA is evaluated by observing the performance (localization error) variation when adopting different model parameters (such as the number of nodes, the number of beacons, and value of ɛ). Table 2 shows the values of parameters, which will be adopted for simulations unless otherwise specified. The localization error is calculated as follows:
Simulation parameters.

5.1. Impact of Multihops Fitting
Figure 9 illustrates the impact of multihops fitting on localization error. MFLA adopts multihops fitting method, and it is obvious that the plot with fitting is much lower than the one without fitting. This is because distance in localization without fitting is obtained via calculating the distance summation of multihops simply, and so localization error is greatly influenced by distribution of intermediate nodes, especially when routing path is serrated. The localization error is largely determined by distance error, and distance error will be reduced after multiple curves fitting; thus localization error is observably decreased. Moreover, the error of algorithm without fitting gradually becomes small with the increase of node quantity. This mechanism is attributed to the fact that when node deployment is more dense the multihop paths will be more inclined to appear as a straight line; hence the plot is more stable. With regard to the plot with fitting, straight distance is derived by multihops’ recursive fitting, so localization error has little relation with node quantity. In Figure 10, the error variances of two methods are provided. the plot of algorithm without fitting has a larger variance than the other because the distances by fitting are more close to real ranges.

Error comparison of MFLA and trilateration.

Variance comparison of MFLA and trilateration.
5.2. Impacts of the Number of Nodes and Error Factor
As shown in Figure 11(a), it is distinct that localization error is diminishing with the growth of beacon nodes from 6 to 12. Besides, as the number of unknown beacons grows, the localization error is also decreasing generally. This phenomenon reflects that MFLA is scalable with the number of nodes. In addition, it is found that the reduction of localization error is not linear to the increase of unknown nodes, which is also reflected in Figure 11(b). The reason is that the probability of unknown nodes’ neighboring beacons less than 3 is also reduced; thus the effect of fitting is weakened and localization accuracy is raising up accordingly. In Figure 12, localization error is observed when error factor ɛ is changing from 0.02 to 0.12. It shows the plot of larger ɛ is higher than others, which tallies with the conclusion of theoretical analysis.

Localization error of MFLA versus m and n.

Localization error of MFLA versus ɛ.
In Figures 13 and 14, three observations are made: (
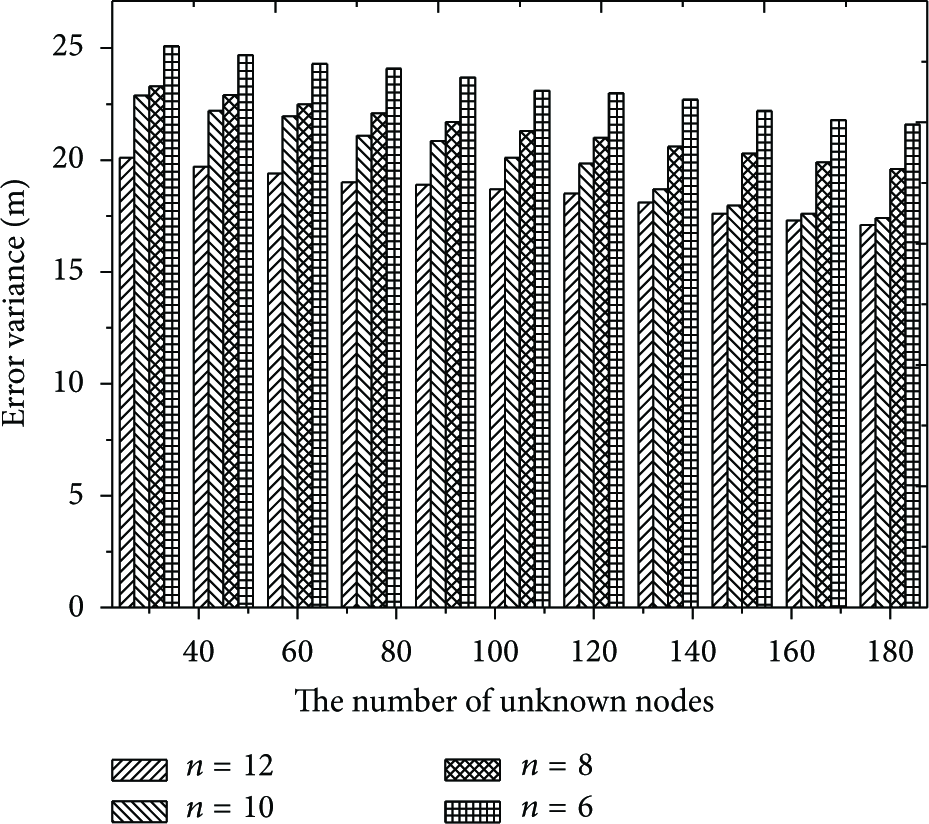
Error variance versus m and n.
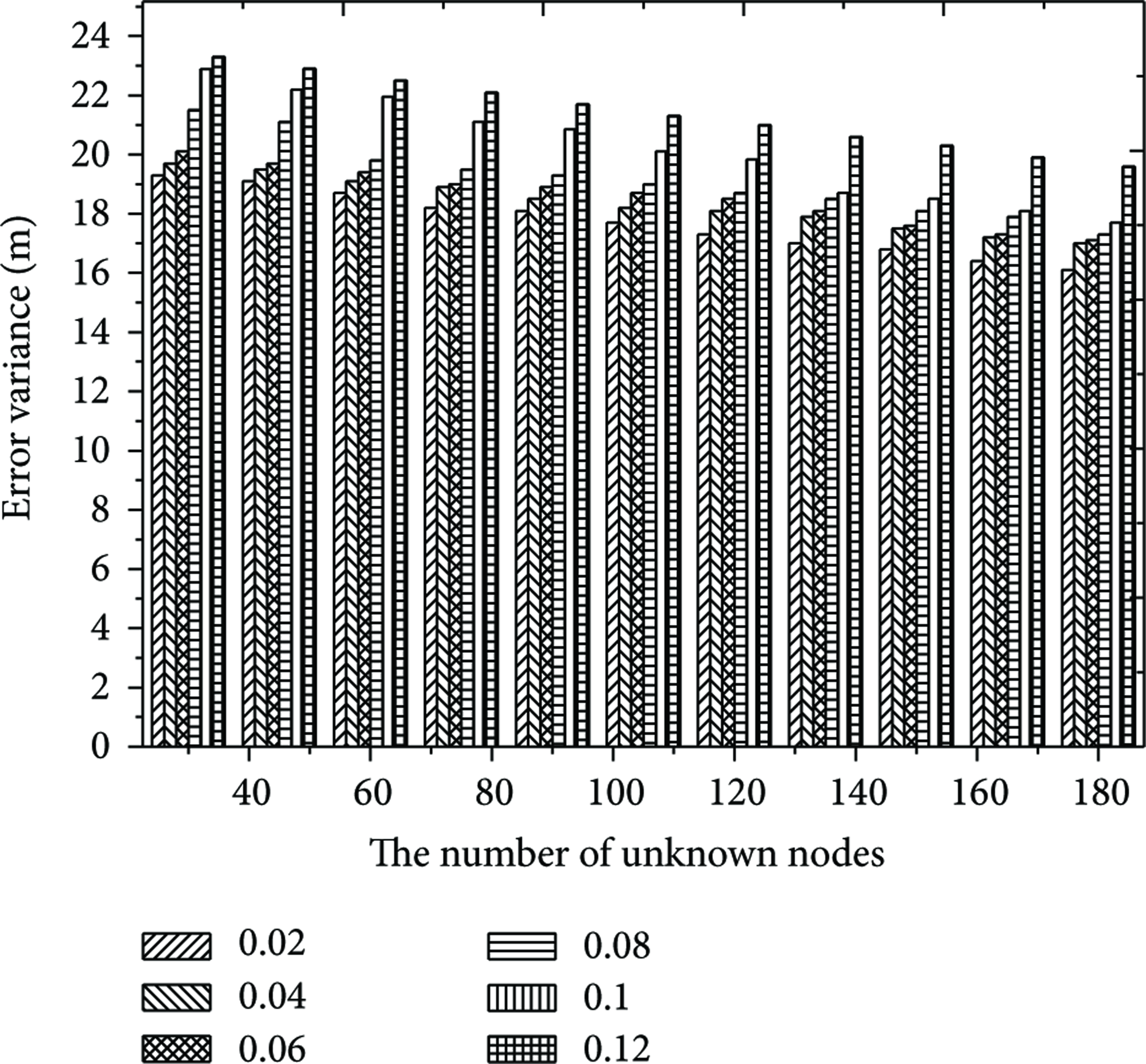
Error variance versus ɛ.
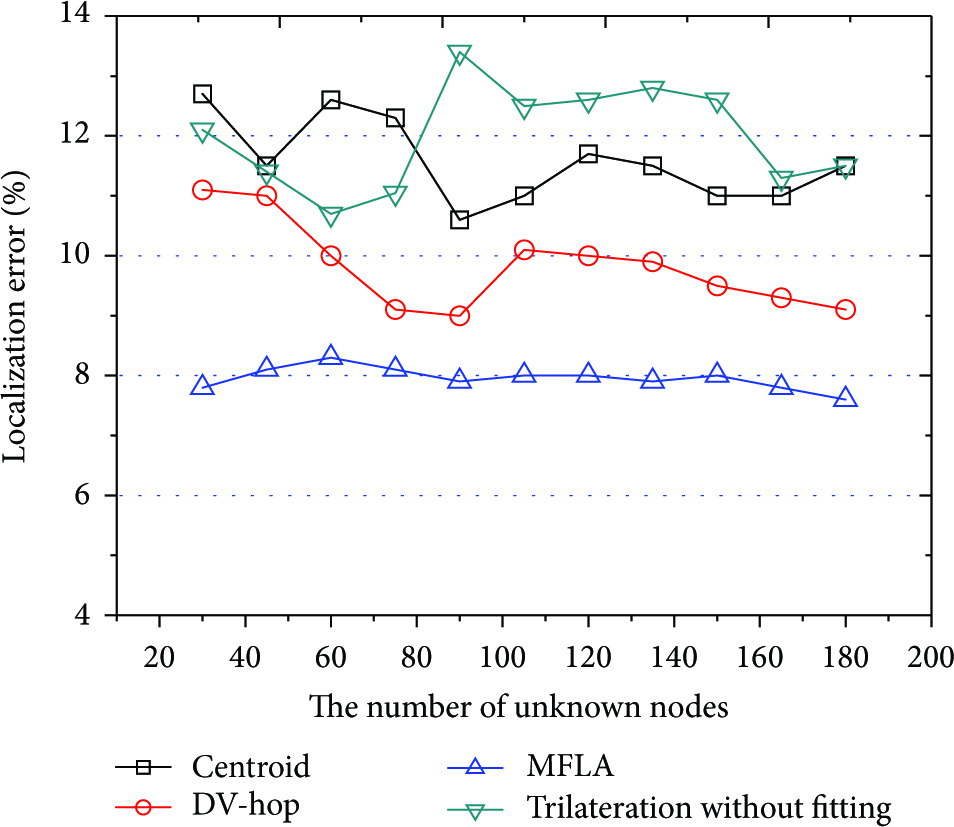
5.3. Comparisons
To make more comparisons, we compare MFLA with other algorithms (DV-Hop, trilateration, and Centroid). From Figure 15, MFLA outperforms other algorithms in terms of localization error. The reason is that MFLA adopts multihops fitting for distance estimation; thus coordinates of unknown nodes are calculated more precisely when neighboring beacons are less than 3.
Comparisons of different algorithms.
6. Conclusions
In this paper a multihops localization algorithm for underwater sensor networks is proposed to provide localization for isolated unknown nodes. The mathematical analysis and simulations are carried out, which indicate that MFLA can improve the positioning accuracy of nodes in severe environments efficiently.
Footnotes
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Acknowledgments
This research is supported by National Natural Science Foundation of China under Grants nos. 61373139, 61373137, 61300239, and 71301081; Natural Science Foundation of Jiangsu Province under Grants nos. BK2012833, BK20130877, and BK20141429; Postdoctoral Science Foundation of China under Grants nos. 2014M560379 and 2014M551635; Scientific and Technological Support Project (Society) of Jiangsu Province under Grant no. BE2013666; Scientific and Technological Support Project (Society) of Lianyungang under Grant no. SH1306; and Postdoctoral Science Foundation of Jiangsu Province under Grant no. 1302085B.