
Abstract
Impulse-radio ultrawideband (IR-UWB) is a promising technique for indoor localization due to its high accuracy and robustness against multipath interferences. In this paper, to deal with the synchronization challenges among anchors in traditional time-difference-of-arrival (TDOA) localization systems, we propose an asynchronous TDOA (ATDOA) localization method. Based on the ranging error model, we derive the theoretical lower bounds as the performance metrics of localization accuracy. Compared with the ideal TDOA method, ATDOA degrades on localization accuracy for eliminating the high accuracy synchronization requirements, which is pretty much attractive in energy and complexity limited scenarios. Based on the performance analysis, we show that there exists optimal anchor deployment in ATDOA that minimizes the localization errors. We also formulate the relationship between this optimal deployment and the size of the covered area, which is meaningful in both theoretical analysis and practical system designs.
1. Introduction
Due to its advantages such as high temporal resolution and multipath immunity, impulse-radio ultrawideband (IR-UWB) is well suited for high accuracy ranging and localization, such as warehouse, people monitoring, and interactive gaming [1, 2].
Typical localization systems contain several anchor nodes with known positions. Range measurements are firstly conducted between the anchors and the agents whose positions are unknown yet. Depending on whether the measured range is absolute or relative, time of arrival (TOA) and time difference of arrival (TDOA) are both widely used for position estimation, respectively [3].
TDOA localization is attractive due to its unlimited users under ideal conditions. One famous example is the global positioning system (GPS). Another advantage is that agents are not required to transmit signals in TDOA, which is preferred in most energy-restricted and multiple-user scenarios, such as wireless sensor networks (WSNs).
On the other hand, since each node has its local clock that works independently, all anchors must be synchronized to estimate the absolute arrival time of the received signal in TDOA localization. High accuracy synchronization among anchors is one of the biggest challenges in TDOA system implementations [4]. Reference broadcast synchronization (RBS) is a popular method to achieve network synchronization [5]. In RBS, the reference node broadcasts a reference signal to all anchors which are prelocated at fixed positions. It is able to achieve the accuracy at μs level by RBS, which is not adequate for high accuracy positioning requirements. Pairwise synchronization is also an option [6], which exploits a typical way by exchanging messages between anchors to achieve synchronization. However, a large number of beacon packets for synchronization are generated for the peer-to-peer synchronization. Thereby, a very long synchronization time is required for the whole network, which is also not recommended in most real-time scenarios. Some similar methods based on the wire connections between anchors are given in [7]. However, they are all impractical and inconvenient in wireless applications.
Some recent work considered the use of TOA measurements to perform joint localization and synchronization [8, 9]. The authors in [10] present methods that achieve localization and synchronization simultaneously. We also find that TDOA can be derived from a general TOA framework for joint localization and synchronization as a special case.
Another issue to be addressed is the anchor deployment. Proper anchor geometric design can highly improve the localization accuracy [11–13]. Reference [14] suggests that, for 2D localization, optimal positions of M anchors are at the vertices of an M-sided regular polygon, and then the best geometric dilution of precision (GDOP) will be found when the target is located at the center of the polygon.
In [15, 16], optimal geometric deployment of anchors is studied by minimizing the CRLB of TDOA localization with a prelocated agent. The conclusions drawn from these researches are under the assumption that the target is prelocated at the center of anchor nodes, which can not be satisfied in practical systems. Reference [17] extends the optimal anchor nodes placement to practical applications by evaluating the average horizontal dilution of precision (HDOP) and vertical dilution of precision (VDOP). However, the results are obtained under the assumption that the path loss has no effect on ranging errors. The discussion of positioning performance with anchor deployment is also given in [18] based on TOA estimation. But to the best of the authors' knowledge, few practical suggestions on how to design the anchors' deployment are given.
In this paper, aiming at the previous discussed issues, the following contributions are made:
To mitigate the synchronization challenge, we present an asynchronous TDOA (ATDOA) localization method using IR-UWB signals. The synchronization requirements among anchors are eliminated, which is able to reduce the system complexity. The error model of ATDOA is derived in terms of the fundamental limits. We use the Cramer-Rao lower bound (CRLB) to perform system evaluations. Practical issues such as clock drifts and path loss effects are considered. We study the optimal anchor deployment with no a priori knowledge available on the agents' positions. According to the error model of ATDOA, we show that there exists simple anchor deployment in the 2D scenario, by which the minimum average CRLB of localization errors can be achieved. It is meaningful for high accuracy and energy efficient localization system design.
2. Asynchronous TDOA Localization Method
In this section, the ATDOA localization method is introduced. We first give a general network scenario, inside which the localization strategy can be carried out.
2.1. Network Model
Consider a typical small scale WSN scenario, such as wireless personal area network (WPAN). There are

Network model.
2.2. Asynchronous TDOA Localization Method
Some statements for ATDOA localization are claimed below before the algorithm details are presented:
There is no synchronization among any nodes in the network. Since it is a small scale network, all nodes are within the coverage of each anchor. The packet transmitted by anchor i consists of UWB signals, which contains the position of original anchor Anchor 1 is selected as the localization initiator, while all agents are kept silent during the whole procedure.
Then, the ATDOA localization method mainly involves the following four steps. Note that here we take one agent as an example, and all other agents can be treated equally and simultaneously:
Anchor 1 broadcasts its position to the whole network in a packet by UWB signals. After receiving the packet from anchor 1 by TOA estimation, other anchors ( Each agent records the arrival time Position estimation is performed on the agent based on the TDOA measurements and anchors' positions.
As shown in Figure 2, the following notations are used in the localization process. The distance between anchor i and anchor 1 is denoted by

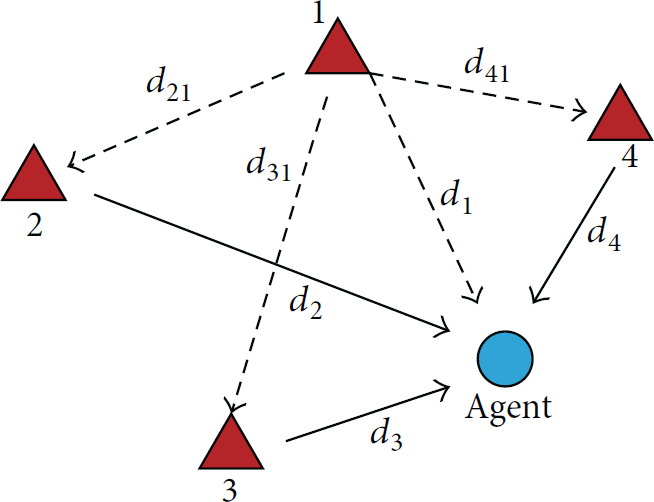
ATDOA demonstration.
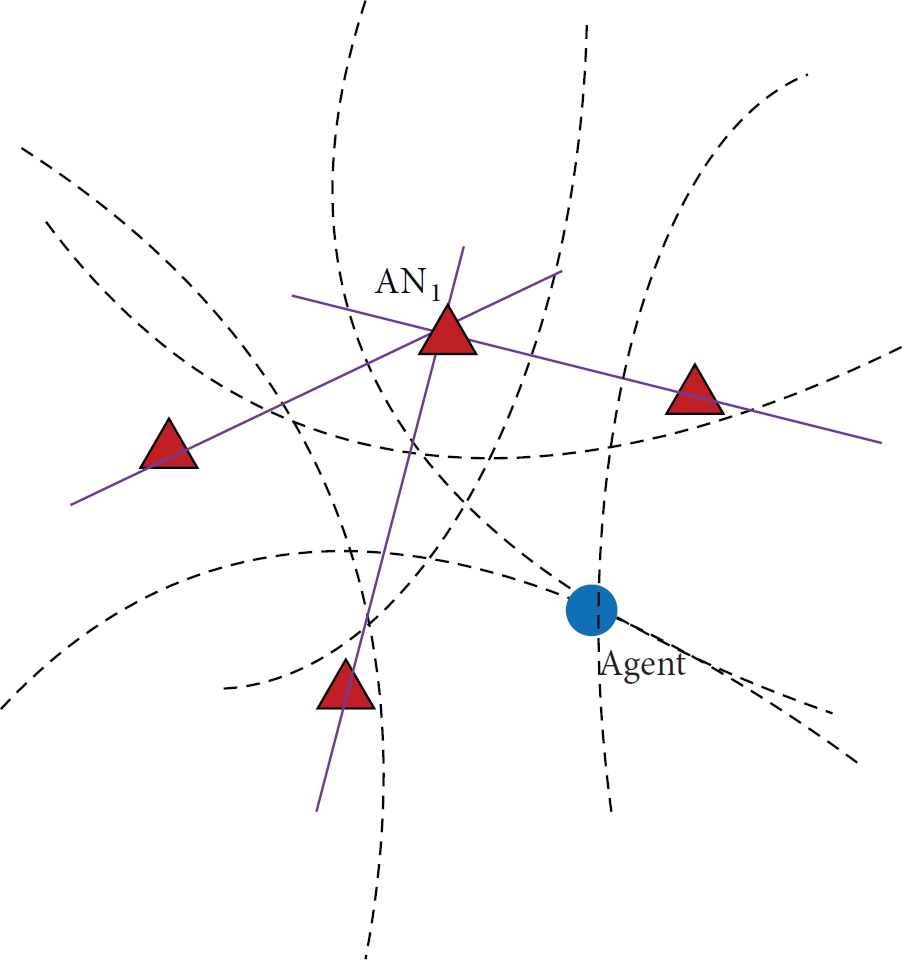
Geometric explanations of ATDOA.
Based on the steps of ATDOA, the reason why no synchronization is needed among nodes is that all TOA estimates are recorded based on the clock of anchor 1, which can be regarded as a reference clock for the network. Since the agents only perform independent signal receiving during the localization, unlimited number of users can be adopted within the network theoretically.
3. Performance Analysis for ATDOA Localization
In this part, the performance analysis is carried out in terms of the fundamental limits. We choose the widely applied Cramer-Rao lower bound (CRLB) as the performance metric. Although the CRLB is a lower bound, which is not guaranteed to be achieved, it offers meaningful performance benchmarks of the proposed method. In addition, that CRLB is a tight bound in the high SNR regime.
3.1. Ranging Error Modeling
Based on the ATDOA localization process, since all agents are working independently, our analysis is started with one single agent, which can be easily extended to the whole network. To obtain the equations in (1), the anchor i (

One of the main error sources in UWB ranging is the multipath environment. In most research, the ranging errors are modeled as zero mean Gaussian variables, especially under line-of-sight (LOS) conditions [18, 20]. The variance is dependent on the measured range, as signals are attenuated with the propagation distance; that is,

The variance of the error in range difference measurements can be obtained based on the results above:

3.2. Derivation of CRLB
CRLB is the theoretical minimum variance of any unbiased estimators, which is a useful benchmark for performance evaluation [21]. Based on the estimation theory, the variance of the position estimates


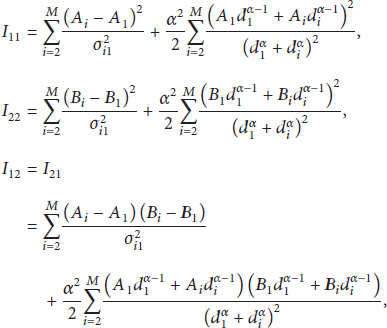
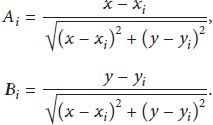
For 2D localization, the CRLB of

3.3. Numeric Results Compared with Ideal TDOA
In Figure 4, the performance between ATDOA and perfectly synchronized TDOA is compared by the average CRLB. ATDOA is only about 0.7 dB worse due to the additional transmission from anchor 1 to the other anchor (from anchor 2 to

Performance comparison between ATDOA and ideal TDOA.
3.4. Clock Drift Considerations
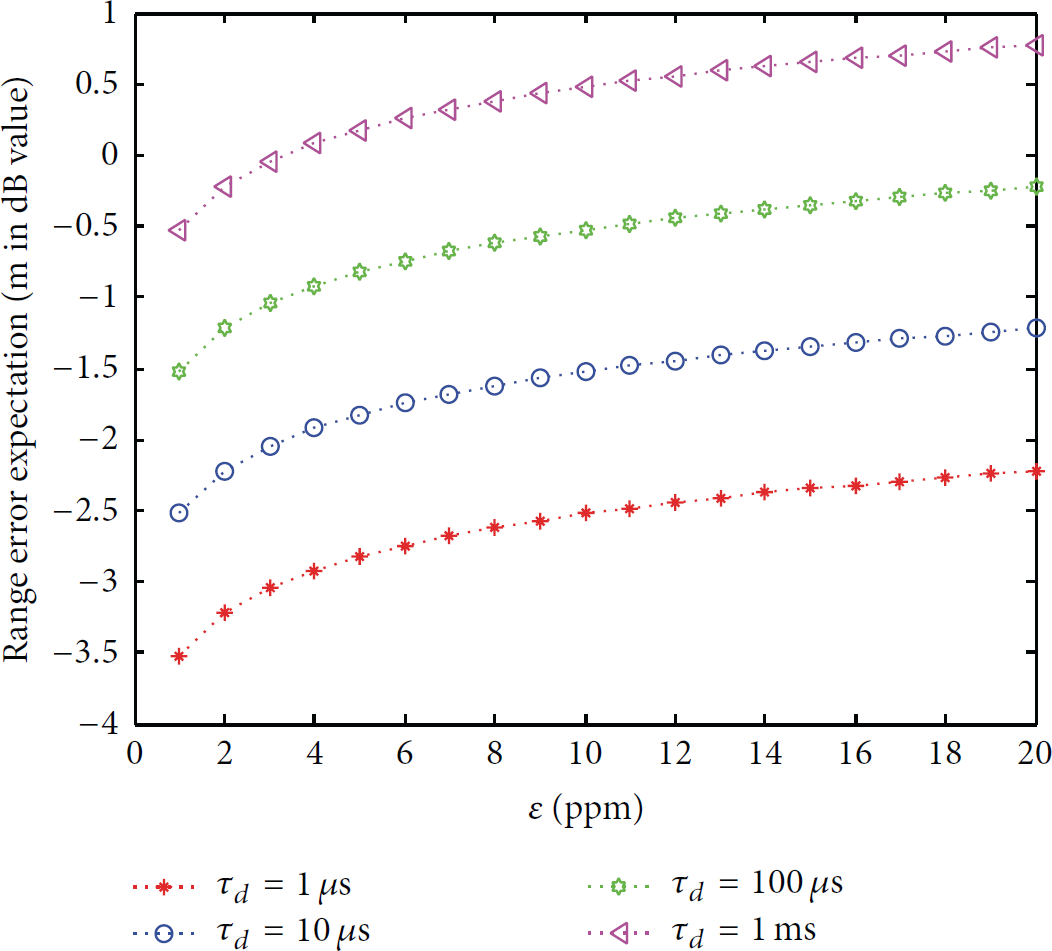
Besides the multipath propagation, clock drift is another main error source in UWB ranging and localization [22]. As we know, there always exists a clock drift between two individual oscillators, especially in the low cost networks. In ATDOA, the clock in anchor 1 is regarded as the reference clock during ATDOA localization.
In step 2 of ATDOA, it requires anchor i to retransmit the UWB signals immediately. Actually, it is impossible for practical systems. A processing time

Based on the discussion above, the ranging error

Error introduced by clock drift.
During ATDOA localization, both


RMSE performance of ATDOA.
It is quite clear that localization performance degrades when the ranging error is increasing. However, it should be noticed that μ and
4. Discussions on the Anchor Deployment Strategy
According to the analysis in the previous section, we study the anchor deployment of ATDOA based on the numeric results achieved. It can be concluded that there exists an optimal deployment strategy within a certain covered area. We also formulate the mathematical model between the deployment and the size of area, which is meaningful to the practical system design.
4.1. Network Settings
We first show that the performance evaluation is based on the following assumptions:
Without loss of generality, the localization area of interest is approximated as a circle for simplicity, whose radius R varies from 4 m to 7 m, which is a typical indoor scenario. As the agent could be placed anywhere within the area with equal likelihood, an average CRLB is applied for the uncertainty of agent positions. Multiple possible positions ( Average CRLB is defined as
Since ranging is performed in typical indoor environments, path loss component α is considered uniformly distributed between 1.7 and 4. Both 1.7 and 4 are typical LOS/NLOS path loss values proposed in [23]. The reference ranging error variance is chosen as



Localization system description.
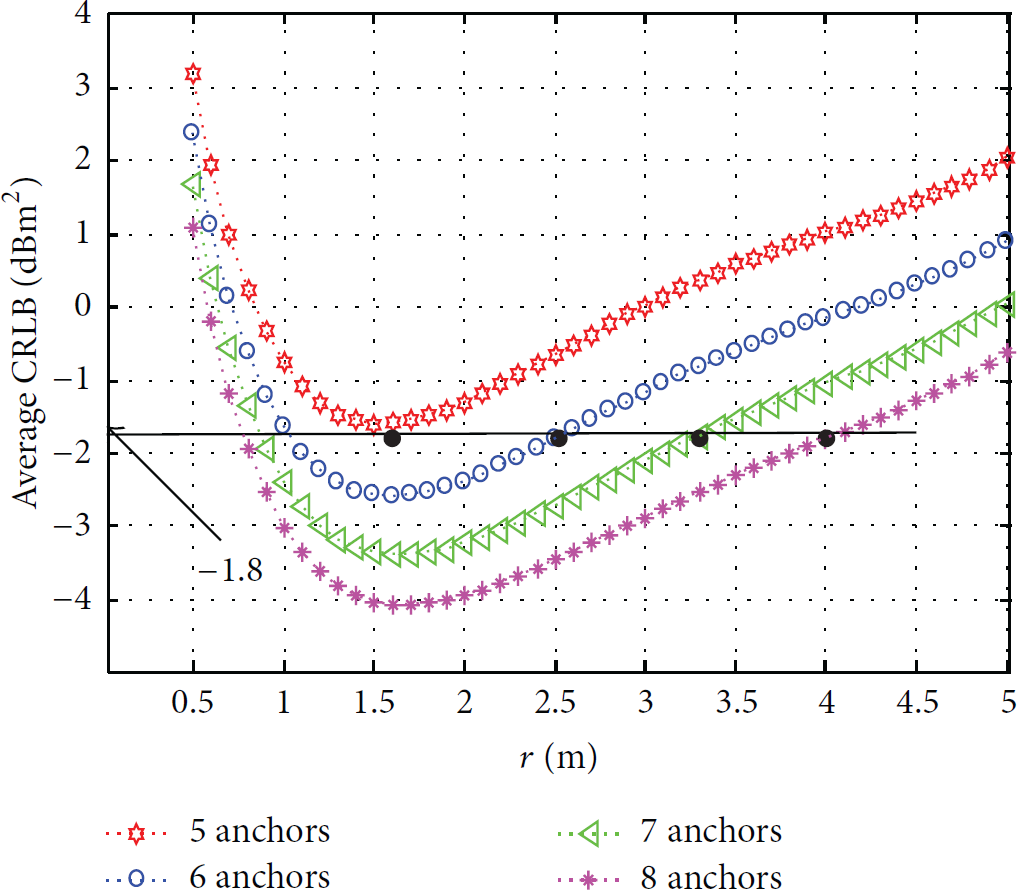
4.2. Existence of Optimal r
From the results in Figure 8, two conclusions can be drawn:
First, the average CRLB decreases with increasing anchors. This is similar to traditional localization methods. Extra 0.5 to 1 dB gain can be obtained by adding one more anchor according to our results. However, this is not a preferred option in energy efficient scenarios, since more anchors require more power consumption and system complexity. It is obvious that reasonable anchors deployment is able to improve the system performance. From the results in Figure 8, there exists an optimal anchor deployment circle radius
Anchor number with respect to a certain accuracy.

Numeric results with different r.
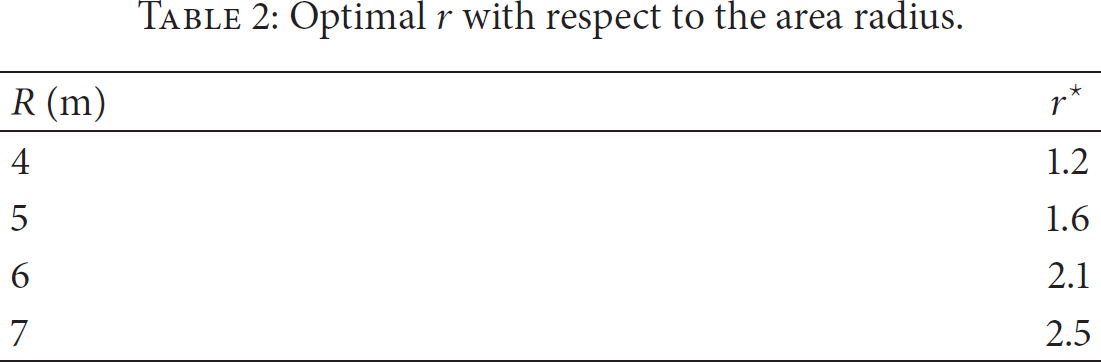
4.3. Mathematical Modeling of Optimal r
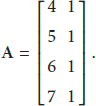
In order to make use of the optimal r for system design, a simplified model is given here. We take 

Optimal r with respect to the area radius.

Optimal r modeling.
Using the least square (LS) method, 
Then, (16) is

This result can be useful, for it provides insight into system design in different areas in order to achieve an optimal tradeoff between performance and energy consumption.
5. Conclusion
In this paper, a low complexity asynchronous TDOA (ATDOA) localization method using UWB signals is proposed. Based on the measurement error model, the performance of ATDOA is evaluated by both CRLB and RMSE. Generally speaking, ATDOA pays costs on localization performance for eliminating the high accuracy synchronization requirements, which is attractive in energy efficient applications. Based on the performance analysis, we show that there exists an appropriate anchor deployment strategy that minimizes the localization errors. Closed form between this anchor deployment and the localization area is given, which is meaningful for practical system designs.
Footnotes
Appendix
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Acknowledgments
The authors would like to thank the National Scientific Foundation of China (61101124), National Science and Technology Major Project of the Ministry of Science and Technology of China (2013ZX03001022), and NEC Labs in China for the financial support.