
Abstract
We propose a selective random cyclic-delay diversity (CDD) enhanced joint cooperative relay and hybrid automatic repeat request (HARQ) scheme for two-hop vehicular communications. Our innovation mainly concentrates on design of the second-hop transmissions. On one hand, the CDD technique is applied across multiple relay nodes to artificially create frequency selectivity and then achieve diversity gain by applying channel coding. The employment of CDD does not necessarily require channel state information (CSI) at the transmitters and thus also decreases overhead caused by CSI feedback. On the other hand, retransmission for the second hop is performed based on relay selection. Particularly, the CDD is constructed only over selected relay nodes with qualified channel qualities to achieve a better frequency selective channel. As the selection results vary with random channel fading, our scheme is termed selective random CDD. Our scheme is presented based on a generic model and further applied into two scenarios, respectively: (1) car-to-car communications in high-way vehicular networks; (2) downlink transmission for the high velocity mobile station in cellular networks. Simulation results show that our proposed selective random CDD scheme can achieve higher throughput as well as lower transmission delay than the conventional cooperative beamforming based transmission scheme.
1. Introduction
With the explosively increasing demands on mobile communications services, supporting transmissions among/to mobile nodes with high velocity becomes a critically important task for the design of communications systems. Correspondingly, the vehicular communications have gained a wide spectrum of applications [1–5]. The vehicular communications and networks can be mainly divided into two categories. One category defines the information delivery for vehicles equipped with communications devices, where the network is ad hoc and typically does not rely on the infrastructure. The other describes the communications of cellular user equipment carried by vehicles to the infrastructure facilities such as cellular base station and/or road side unit. These two types of networks face a common challenge when the velocities of moving nodes get high. That is, the link quality directly connecting the transmit and receiver is unstable, leading to poorer reliability and very limited coverage.
To conquer the challenges, relay-aided transmissions [4–9] and hybrid automatic repeat request (HARQ) [9] are widely investigated to combat the drastically varying channel fading such that the reliability can be effectively enhanced. These two techniques typically improve reliability at the cost of longer delay, thus being suitable for delay-tolerant services in vehicular networks. In particular, HARQ can combine received signals through multiple retransmissions to increase the postprocessed signal-to-noise ratio (SNR), while relay-aided transmissions take advantage of shorter propagation distance by using the multihop connection to suppress SNR degradation in each hop. To further improve the reliability as well as other performance metrics such as outage probability, throughput, and energy efficiency, cooperative relay is often employed, where different relay nodes cooperate in forwarding information from a source to a destination [10–12]. Such a solution can exploit the diversity across spatially distributed wireless channels, while only single transmit/receive antenna for each node is needed. Following this principle, cooperative beamforming is the typical cooperative relay scheme [13–15] that received major research attention.
However, despite the efforts of research communities spent in improving the reliability for vehicular communications, some major problems have not been adequately studied. First, the cooperative beamforming needs accurate channel state information (CSI) to implement maximum ratio transmissions (MRT), thus frequently introducing extra overhead and degrading transmissions efficiency. Second, vehicular networks often generate fast varying channels, which may cause mismatch between the CSI fed back and the actual channel for followed data payload transmission. Third, conventional cooperative beamforming only exploits the diversity benefited from location-independent relays, while not addressing the frequency selectivity for further performance improvement.
To overcome the aforementioned problems, we in this paper propose selective random cyclic-delay diversity (CDD) enhanced joint cooperative relay and HARQ scheme for two-hop vehicular communications. We first apply the CDD technique across multiple relay nodes to create frequency selectivity of the equivalent channel. Then, we can achieve the inherent diversity gain when using channel coding. Moreover, HARQ for the second hop is employed with relay selection, where the CDD is constructed over selected relay nodes with better channel qualities, thus forming better frequency-selective channels. Discussions and simulations show that our proposed selective random CDD scheme outperforms the conventional beamforming in terms of transmission failure probability, throughput, and overhead for the typical car-to-car communications in highway environments and for cellular communications from the base station (BS) to moving mobile station (MS).
The rest of the paper is organized as follows. Section 2 describes the generic system model and applies it to two vehicular communications scenarios, including car-to-car communications in highway environments and BS-to-MS communications in cellular networks. Section 3 proposes the selective random CDD based relay and HARQ scheme. Section 4 evaluates the performance via simulations. The paper concludes with Section 5.
2. System Model
We first present a generic model of cooperative relay transmissions for delay-tolerant vehicular communications services, which share the common features among diverse vehicular communications scenarios. Following this generic model, we concentrate on two specific vehicular communications systems. One is for car-to-car communications in highways and the other is for relay communications from the base station of cellular networks to the mobile station with high velocity. We in this paper target at developing the scheme that can bring performance gains for both scenarios as compared to the conventional approach using the cooperative beamforming. For presentation convenience, we collect the main notations and variables at the end of this paper and please see Notations and Variables section.
2.1. Generic System Descriptions
We consider a network consisting of one source node (node S), one destination node (node D), and a set of relay nodes (or called relay in short), which are denoted by n,

Generic model of relay transmissions for delay-tolerant vehicular communications.
Due to the limit of transmit power, the transmission range for the source is often limited. Thus, the relay nodes are used to help the source to forward the data based on the decode-and-forward (DF) relay techniques. The entire relay transmissions process includes two phases (corresponding to the two hops). The first phase (hop) is broadcasting phase, where the source broadcast data to all relays. The second phase (hop) is the cooperative transmission phase. Note that in the rest of this paper the terms hop and phase are interchangeable. All relay nodes which can correctly decode the data will transmit the recovered signal to the destinations. As we focus on delay-tolerant services, for the 2nd phase, hybrid automatic repeat request (HARQ) mechanisms are adopted for better reliability. But the maximum retransmission times are upper-bounded for HARQ. Note that we in this framework only use HARQ in the second phase. This is because the chance that the first-phase transmission fails for all recipients is usually small, while the second-phase transmissions only deal with a single receiver.
The distance between the source node and the nth relay node is denoted by
2.2. Car-to-Car Communications Model
The application of the generic model to the car-to-car communications can be substantialized as the scenario described in Figure 2. We consider a segment of a highway with the length equal to L m. The highway includes U lanes each with the width equal to W m. There are total
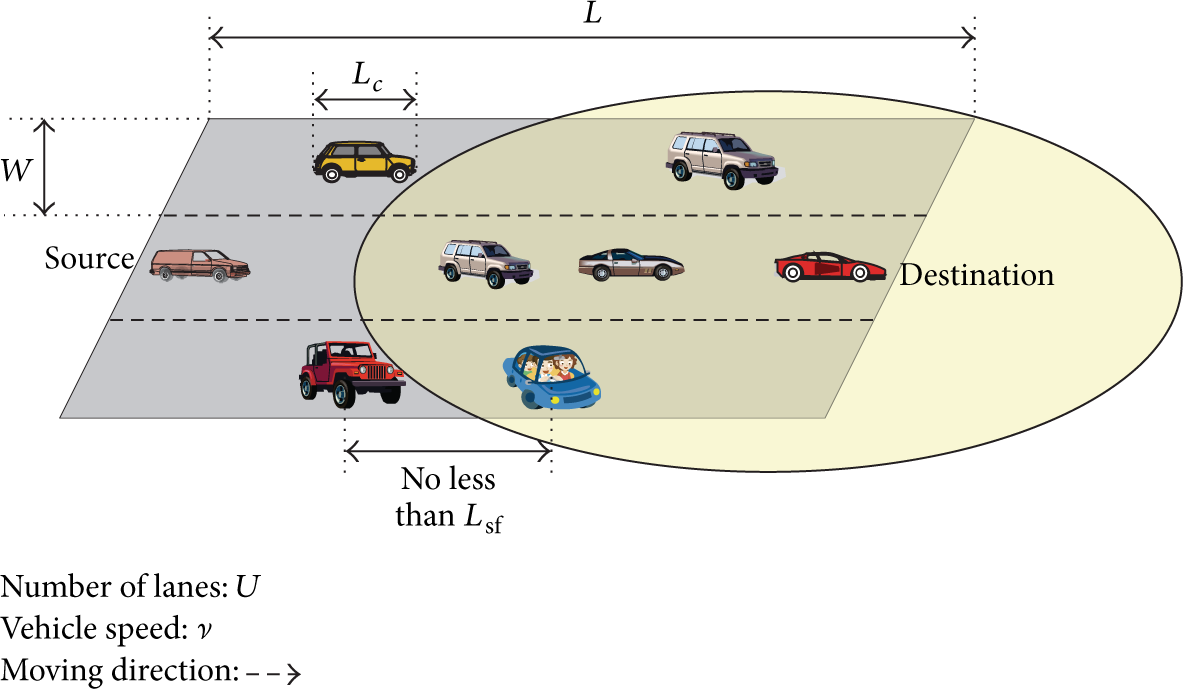
System model for car-to-car communications.
We assume that all vehicles move towards the same direction with the same velocity v (m/s). These assumptions are rational because of the following reasons. First, vehicles with the same driving direction can form more stable networks than those driving with different directions. Second, vehicles with the same driving direction on the highway usually keeps similar velocity. Although the velocities may vary often, the fluctuation rate is typically small as compared to the signal bandwidth. We further set all vehicles' lengths to


Note that each transmitter uses different pilots, which can be thoroughly designed such that the pilots are orthogonal to each other, while still expanding the entire frequency band. Then, multiple relay nodes can concurrently transmit pilots without impacting on the channel estimation at the receiver. The transmit power for pilots is large enough so that the channel estimation can be sufficiently accurate. As we have total M subcarriers, the degree-of-freedom equals M in the signal space. Hence, the maximum number of orthogonal pilots is also M. In this sense, the total number N of relay nodes needs to be smaller than M. It is worth noting that, in practical systems, the M is often set large for a variety of typical networks and the bandwidth and M can also be regulated to adapt to the actual number of relay nodes.
The channel fading between any two vehicles is supposed to be flat and block fading and follow Rayleigh fading model. The channel gains vary across consecutive frames based on the following model:


2.3. Cellular Relay Communications Model
The model of cellular relay communications for moving the mobile station is depicted in Figure 3, where the base station (BS) transmits data to the mobile station via relay stations. The modulation, coding, and channel model all follow the 3GPP specifications [16] and technical reports, which will be detailed in Section 2.3. Thus, the evaluations of our proposed scheme will be more meaningful for practical systems.

System model for cellular relay communications for mobile stations.
Note that the major differences between the cellular relay transmissions and the car-to-car relay communications include the followings. First, for cellular networks, the base station and the relay stations do not move, unlike the car-to-car communications. In this case, the channels of the broadcast phase in cellular networks are often statistically better than those in car-to-car communications. Second, the transmission environments for the 2nd-phase transmissions in cellular networks are usually more complex than car-to-car communications, leading to more sophisticated double-selective (time-selective and frequency-selective) channel models. Third, for cellular networks, we do not impose any constraints on the mobile station's size and positions. This is because the cellular network model usually deals with more general scenarios without specifying special requirements on the mobile stations.
As discussed in the above, in this paper we deal with two typical networks supporting delay-tolerant services. Our target is to develop the efficient relay and HARQ schemes which can fit well for diverse mobile networking environments by providing better reliability.
3. Selective Random CDD Enhanced Relay Transmissions
We in this paper proposed the selective random cyclic-delay diversity (CDD) enhanced relay beamforming scheme. Then, we will also discuss the conventional cooperative beamforming based relay transmissions in comparison with our proposed scheme.
3.1. The Selective Random CDD Transmission Schemes
The core idea of our scheme is to obtain the cyclic-delay diversity (CDD) in vehicular communications. The CDD technique is often used in multiple antenna techniques [17–20] for performance gain. As we have multiple relay nodes to cooperatively transmit data to the destination, we can virtually form a multi-input-multi-output (MIMO) transmission and thus be able to take advantage of CDD. The other merit for CDD is that the transmitter does not need the exact channel information. In this paper, we adopt the selective random CDD (to be explained later) for the 2nd-phase transmission and associated HARQ. Particularly, multiple relay nodes send data by using CDD. Correspondingly, the destination can choose the relay node based on the channel fading status if decoding is not successful. The selected relay nodes then again apply CDD for cooperative HARQ. The detailed processing procedures of the selective random CDD are given elaborated on as follows.
Step 1 (the first phase: broadcasting from source to relays).
The source node broadcasts signal
Step 2 (the second phase: random CDD based transmission from relays to destination).
Assume that there are



Step 3 (the second phase: ACK/NACK by the destination).
If CRC checking returns correct results at the destination node, ACK packet is transmitted back to relays and further forwarded to the source by relays. New packet transmission will then be scheduled. In contrast, if CRC checking does not pass, NACK packet will be sent back. But the NACK packet is only forwarded towards selected candidate relay nodes. The selection is performed by the destination based on certain criterion, such as the signal-to-noise ratio (SNR) threshold based criterion. Then, the selected relay nodes will perform retransmission, that is, HARQ, in next step.
Step 4 (the second phase: retransmission by selective random CDD).
In this step, the indices of selected candidate relay nodes are denoted by

Correspondingly, the received signal at the destination is given by
Next, using the processing for





If CRC check does not pass, the destination will feed the NACK back and require retransmission again. This process is repeated until the maximum number of retransmissions is reached. Once successful, an ACK packet will be sent back to relays and relays will also transmit ACK to the source, indicating the successful transmission. Note that the selection is performed only once, and retransmission is always done from the selected nodes. This setup is motivated by the fact the channel often varies slowly as compared to the signal bandwidth. Figure 4 illustrates the procedures described in the above by a typical example with 5 relay nodes. As shown in Figure 4, there are three relays which become candidate nodes after broadcast phase. Among all candidate relay nodes, relay node 2 with poor channel quality will not involve retransmissions.

The procedures for our proposed selective random CDD based joint cooperative relay and HARQ scheme.
3.2. Discussions on the Proposed Scheme and the Conventional Approach
A conventional yet straightforward approach for cooperative relay and HARQ is cooperative beamforming. The cooperative beamforming has been proposed to achieve high throughput or minimum energy consumption in [13–15]. In the cooperative beamforming, the source broadcasts the data to the relay nodes, and some or all of which cooperatively perform beamforming to forward the data to the destination. For completeness of this paper, we summarize the basic procedure of the straightforward cooperative beamforming for HARQ transmission in the following.
Step 1 (broadcasting).
The source broadcasts data to the multiple relay nodes. If the relay node decodes the data correctly, it involves the 2nd-phase transmission.
Step 2 (training).
The selected relay nodes transmit the pilot signals to destination node.
Step 3 (feedback of CSI).
The destination node chooses relay nodes based on the received pilots and feeds CSI back to the chosen relay nodesl.
Step 4 (cooperative beamforming).
The selected relay nodes use maximal ratio transmission (MRT) beamforming to cooperatively send data to the destination based on CSI feedback.
Step 5 (NACK and CSI update).
If CRC is correct in the destination, send back ACK and continue; if CRC is not correct, send back NACK and the update CSI to the selected relay nodes.
Step 6 (retransmission).
The selected relay nodes transmit data Y cooperatively based on the feedback update CSI.
Step 7 (signal combination).
Destination will combine the 2nd transmission selected results with the 1st transmission and check CRC again. If CRC is not correct, ask for retransmission again if the maximum transmission number is not achieved.
Compared to cooperative beamforming, the features of the proposed selective random CDD are as follows.
If the direct forwarding through random CDD can get the correct results, that is, one time of packet transmission is enough to decode the data correctly in the 2nd hop, the new packet transmission can be scheduled in the following time. While in cooperative beamforming, the pilot signal must be transmitted at first, and the first packet transmission must wait for the CSI feedback from the destination based on the estimation of the pilot signal. Therefore, the feedback signaling overhead and round trip time of our proposal can be reduced compared to cooperative beamforming. If the direct forwarding through random CDD fails, the selective random CDD only send back NACK to the relay nodes after the selection, which is performed by the destination based on some criteria, such as SINR threshold. The selection can get rid of relative bad relay nodes and then form a better frequency-selective channel, which can achieve diversity gain when concatenating with channel coding (channel coding is used generally in the wireless communication system), just like the description and evaluation in [21–24]. Moreover, the power consumption of the bad relay nodes can be saved because the unnecessary transmission is avoided. Selective random CDD can work in fast fading channel, while the cooperative beamforming needs accurate CSI from the destination and is generally only used in slow fading channel. Selective random CDD has no strict requirement on synchronization because of its inherent characteristics. However, in the cooperative beamforming, the multiple relay nodes need to keep the precise synchronization when transmitting the packets. Otherwise the performance will be reduced greatly.
4. Performance Evaluations
We in this section evaluate the performances of our proposed scheme via simulations. Specifically, we will summarize the simulation results in Sections 4.1 and 4.2, respectively, because the network environments and system parameters are very different for the two networks. For comparative purposes, we also simulate the performances of the conventional cooperative beamforming approach described in Section 3.2 as the baseline scheme.
4.1. Simulations Setup and Results for the Scenario of Car-to-Car Communications
For the vehicular network described in Section 2.2, the parameters for the car-to-car communications are as follows. We set the vehicular velocity by
First of all, 1 ms frame is widely used for the practical communications system such as LTE-A [16]. Making the frame length further short does not provide useful guidance for practical systems. Moreover, given the vehicular velocity v at 60 km/h and the carrier frequency of 2 GHz (typical frequency band for cellular networks), the maximum Doppler frequency is thus equal to 111.11 Hz, which suggests that the wireless channels usually change significantly over around 10 ms (roughly obtained by taking the reciprocal of the maximum Doppler frequency). In this sense, if using a long frame, the channel may vary drastically within a frame, causing considerable difficulties for channel estimation and signal detection in practical systems. It is worth noting that this issue in fact just reflects the unique features for car-to-car communications. Due to the high moving speed, the wireless channels vary very fast and therefore the employment of short time frames is desired, although the amount of overhead increases a bit accordingly. Following the above discussions, we can see that setting frame length to 1 ms is reasonable by taking both the channel variation and the practical implementations into consideration.
The path-loss exponent
We concentrate on three metrics for performance evaluations, namely, transmission failure probability, average overhead (frame), and average throughput. Specifically, the transmission failure probability is defined as the probability that the transmission of a coded data block is failed. The average overhead is defined by the average number of feedback packets (ACK/NACK with/without CSI) consumed for the transmission of each data block (either success of failure). The average throughput counts for the information bits transmitted per second.
Figure 5 plots the transmission failure probability as a function of the number N of relay nodes in the vehicular network. According to Figure 5, the transmission failure probabilities of both our proposed selective random CDD scheme and the conventional cooperative beamforming scheme decrease when getting more relay nodes. This is expected in that more relay nodes offer better selection, increasing the possibility of success transmission. From Figure 5, we can also see that larger coverage radius (or, equivalently, higher transmission power) causes lower transmission probability.

The transmission failure probability versus the number N of relay nodes in the vehicular network.
The more important observation from Figure 5 is that our proposed scheme achieves a significant reduction of failure probability compared with the cooperative beamforming approach. This advantage comes from two facts. As discussed previously, the selective random CDD scheme can create artificial frequency selectivity, thus attaining extra diversity gains when channel coding is employed. On the other hand, the selective CDD scheme does not need CSI, not like the cooperative beamforming. In car-to-car communications, the channels vary fast and CSI obtained one frame before is often not very accurate already. Moreover, the cooperative beamforming requires dedicated pilot frame (without data payload, see Section 3.2), causing extra delay and thus further degrading the accuracy of CSI. In the meantime, the extra delay also lowers the throughput, which will be demonstrated in Figure 7.
Figure 6 depicts the average overhead against the number N of relay nodes. Figure 6 demonstrates that our proposed selective random CDD scheme dominates the cooperative beamforming scheme under all values of N. An interesting observation from Figure 6 is that the average overhead might not be a monotonic function of N, which is also expected based on the following reasons. For small N, the broadcasting phase is very likely unsuccessful. So, the second-phase transmission will not proceed, which in fact avoid more overhead transmissions. For large N, better choice of relays can be made to decrease the number of retransmissions and thus the overhead. Similar arguments can be used to justify the observation that higher coverage radius (i.e., higher transmit power) does not necessarily lower the overhead.

The average overhead per data block transmission versus the number N of relay nodes in the vehicular network.

Average throughput versus the number N of relay nodes in the vehicular network.
Figure 7 illustrates the average throughput versus the number N of relay nodes. The throughput of both schemes increases with N getting larger, which is consistent with the results obtained in Figure 5. Moreover, it is expected that the selective random CDD scheme performs better, because it dominates the cooperative beamforming in terms of lower failure probability as well as lower overhead. We can also see that, for
4.2. Simulations Setup and Results for the Scenario of the Cellular Network
The main simulation parameters for the cellular network with mobile stations are summarized in Table 1. The detailed simulation settings such as OFDM parameters and frame structures follow the 3GPP specifications. In Table 1, we employ the single antenna setup for transmitting and receiving data. Note that our scheme can be also readily extended to the scenario with multiantenna transceivers. But in simulations, in order to concentrate on the gain brought by the HARQ and CDD techniques, we assume to use the single antenna systems.
Simulation parameters for the cellular network.

Figure 8 plots the throughput performance of the selective random CDD and cooperative beamforming schemes as the function of SNR per symbol denoted by

Throughput comparison between selective random CDD scheme and cooperative beamforming scheme (Case IV, 3 km/h).
Figure 9 illustrates the throughput performance against SNR, where the velocity of the mobile station is 120 km/h. We can see that when the moving speed gets higher, the throughput improvement of the selective random CDD over the cooperative beamforming further becomes more significant correspondingly. This is also expected because larger velocity of mobile stations leads to higher variation rate of wireless channels. As a result, the CSI to the relay will be more inaccurate when they are used for cooperative beamforming.

Throughput comparison between selective random CDD and cooperative beamforming (Case II, 120 km/h).
The transmission time delay is also evaluated by counting the average uplink and downlink transmission time, that is, round trip time, in Figure 10. The two schemes are compared in the simulation. It can be seen from the statistical results given in Figure 10 that the round trip time (RTT) of the selective random CDD is lower than our proposed scheme. This is because the selective random CDD does not need CSI feedback in the first transmission attempt, which already gets considerable probability of success. In contrast, the cooperative beamforming needs to wait for CSI feedback, causing major delay for data delivery in the dual-hop transmissions.
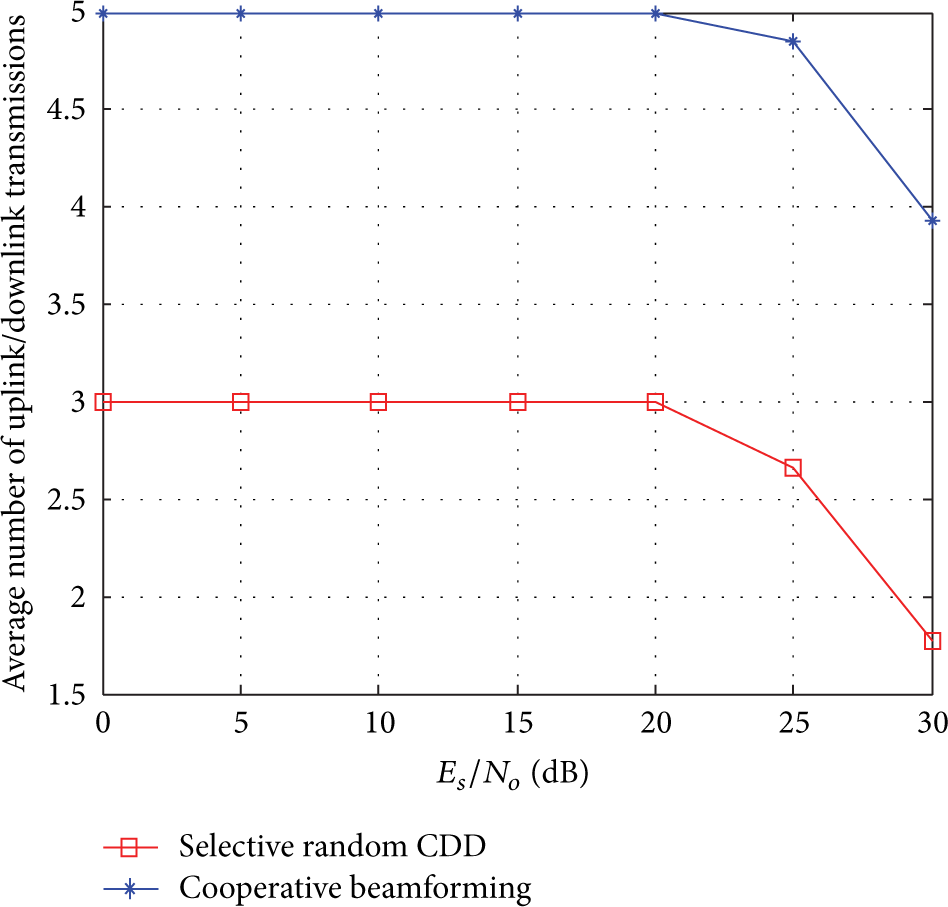
Transmission time delay comparison between selective random CDD and cooperative beamforming.
5. Conclusions
We proposed a selective random CDD based joint cooperative relay and HARQ scheme for delay-tolerant services in vehicular communications. Our design can take advantage of frequency selectivity created by applying CDD techniques. In the meantime, the selective random CDD can reduce the overhead as well as the dependency on CSI compared with conventional cooperative beamforming scheme. Our design was proposed under a generic model and can be applied to two typical vehicular networking scenarios, including car-to-car communications in highway environments and BS-to-MS communications in cellular networks. Through simulations, our proposed scheme exhibited performance superiority over the conventional cooperative beamforming scheme in terms of throughput and transmission failure probability.
Footnotes
Notations and Variables
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Acknowledgments
This work is supported by the National Natural Science Foundation of China under Grant no. 61102078, the National Science and Technology Major Project under Grant no. 2013ZX03003001-002, the Specialized Research Fund for the Doctoral Program of Higher Education under Grant no. 20110201120014, ZTE Industry-Academic Research Cooperation Funds, the open research fund of National Mobile Communications Research Laboratory, Southeast University (no. 2011D10), and the Fundamental Research Funds for the Central Universities.