
Abstract
In wireless sensor networks, the fusion center collects the dates from the sensor nodes and makes the optimal decision fusion, while the optimal decision fusion rules need the performance parameters of each sensor node. However, sensors, particularly low-cost and low-precision sensors, are usually displaced in harsh environment and their performance parameters can be easily affected by the environment and hardly be known in advance. In order to resolve this issue, we take a heterogeneous wireless sensor network system, which is composed of both low-quality and high-quality sensors. Low-quality sensors are inexpensive and consume less energy while high-quality sensors are expensive and consume much more energy but provide high accuracy. Our approach uses one high-quality sensor as the guidance sensor, which enables the fusion center to estimate the performance parameters of the low-quality sensors online during the whole sampling process, and optimal decision fusion rule can be used in practice. Through using the low-quality sensors rather than the high-quality sensor most of the time, the system can efficiently reduce the system-level energy cost and prolong the network lifetime.
1. Introduction
Wireless sensor networks are usually deployed in the observation area in order to observe and analyze certain phenomena. The main goal of wireless sensor networks is to collect relevant information from the environment. The recent progress in microelectronics, wireless communication, and information processing enables the deployment of wireless sensor networks consisting of a large number of sensor nodes in order to accomplish tasks, such as event monitoring and location. Usually a wireless sensor network is composed of a base station and a large number of sensor nodes. The base station and these sensor nodes can communicate with each other through a single hop or multiple hops. The sensor nodes collect the information from the environment and send the information to the base station while the base station is responsible for combining this information and making the final assessment [1].
Distributed detection is an important research field of wireless sensor networks. Due to the limit communication energy of the sensor nodes [2], each sensor node processes its raw observation data and makes its own decision about whether an event occurs and then sends its decision to the cluster node or the base station to make the final decision. The cluster node or the base station can be considered as the fusion center which is used to fuse the decisions of the sensor nodes based on some decision fusion rules. The decision fusion rules have been studied in the previous research articles. In [3], the author extends the classical detection theory to the case of distributed sensors based on the classical method of statistical hypothesis testing. In [4], the data fusion problem for fixed binary detectors with independent decisions is solved by minimizing the system-level error probability. The author in [5] proposes the optimal decision fusion rules for correlation local binary decisions. The channel aware decision fusion rule is assumed in [6], and, in [7], the decision fusion rule considering the channel fading environment in multihop sensor network is proposed. A likelihood ratio-based fusion rule which requires the statistics information of the channel has been studied in [8].
The optimal decision fusion rules need to know the error probabilities of each sensor like the detection probability and the false alarm probability. This can be considered to be feasible in early detection systems like radar or sonar systems. But in wireless sensor networks, as the low-cost and low-precision sensors are usually displaced in the harsh environment, the parameters of the low-end sensors can hardly be known and may change when the environment changes. The author in [9, 10] uses the total number of decisions of the sensor nodes to make the final decision but this final decision is not the optimal result even when the number of the sensors is large enough. In [11] a local vote decision fusion method is proposed. The author in [12] shows that when the number of the sensors is large enough, the system performance can be guaranteed by using the majority rules. Enough sensor nodes are needed in these methods, while, in practice, it is hard to place such a large number of sensors due to the limited space. In order to reach the optimal fusion result, the optimal decision fusion rule is needed.
It is necessary to know the performance parameters of the sensors in order to achieve the optimal decision fusion rules in wireless sensor networks. In [13, 14], the weights used in the optimal decision fusion rules are estimated directly through reinforcement learning and only the decisions falling in the reliable ranges are included in the adaptive process, but the optimal reliable ranges can hardly be chosen during the process and there exists an error between the true value and the estimated value. In [15], the author finds the relationships between the unknown parameters of the sensors and the statistical combinations of different decisions. Through solving a nonlinear equation, the unknown parameters can be calculated without biases. But the algorithm complexity of this method is so high that this method can not apply to the wireless sensor network. In [16], the minimax robust data fusion schemes are proposed, while the observations of the sensor nodes are characterized by using statistical uncertainty. In [17], the author analyzed the robust detection method and discussed the data compression scheme for different sensors. Even though these methods provide us with some useful methods to determine the unknown parameters of sensors, they need high computational complexity and are not suitable in the area of sensor networks. In sensor networks, we need some simple but effective methods to obtain the parameters of the sensor nodes.
Energy consumption is another concern for sensor networks. Many energy-efficient techniques have focused on the communication and network levels. These methods include routing algorithms [18], clustering algorithm [19], data aggregation [20, 21], and MAC protocols [22]. Considering the distributed detection problems in sensor networks, the author in [23] uses the ordered transmissions mechanism to reduce the average number of transmissions, which can be proved to reduce the energy consumption. Per-sensor censor mechanism has been discussed in order to reduce the system-level cost in [24, 25]. However, this method solves the energy-efficient problems from different perspectives in the area of distributed detection without considering the uncertain performance of the sensor nodes.
Many practical wireless sensor networks have multiple sensor modalities [26]. In [27], a surveillance system has both low-end passive infrared sensors and high-quality pan-tilt-zoom cameras. High-quality sensors have higher precision and the environmental change has little impact on the performance of the high-quality sensors, but the high-quality sensors usually are expensive and these high-quality sensors cannot be deployed in large numbers. The high-quality sensors may consume much more energy than the low-end sensors. So in practice, low-precision and cheap sensors are largely deployed and used in practice. In [28], the author proposes an adaptive calibration for wireless sensor networks; the high-quality sensor is used as the feedback to adjust the decision threshold while the low-end sensors collaborate to detect the targets through combining the observations of the low-quality sensor nodes.
In this paper, we propose a novel approach for adaptive decision fusion in a heterogeneous sensor network which contains one high-quality sensor and several low-quality sensors. We propose a mechanism to reach the optimal decision fusion adaptively. During the estimation phase, we can estimate the parameters of the low-quality sensor nodes through comparing the decisions made by the high-quality sensor and the low-quality sensor nodes. This method is simple but effective and the estimated values can coverage in limited steps. During the observation phase, through using the method in Section 5, the system can reach the optimal decision fusion result, and the system can also detect the possible change of the low-quality sensor nodes. Considering the huge energy consumption and the limited energy supply of the whole sensor system, this mechanism can reduce the system-level energy consumption and prolong the lifetime of the system.
The organization of this paper is as follows. The problem formulation is introduced in Section 2. The distributed detection model and the optimal decision fusion rules used in the wireless sensor network are reviewed in Section 3. The method which is used to estimate the performance parameters of the low-end sensors is given in Section 4. The adaptive decision fusion method using the guidance sensor is showed in Section 5. Simulation results with analyses are given in Section 6. Conclusion is provided in Section 7.
2. Problem Formulation
A heterogeneous wireless sensor network consists of a high-quality sensor and several low-quality sensors as Figure 1 shows. The objective of this system is to make the decision of whether the event appears in the observation area. The low-quality sensors like infrared sensors are cheap and consume low energy but have limited sensing performance. In addition, the parameters of the low-quality sensors can be affected due to the change of the environment [12]. In contrast, the high-quality sensors like cameras [29] or radars [30] usually have high measurement accuracy with high energy consumption.
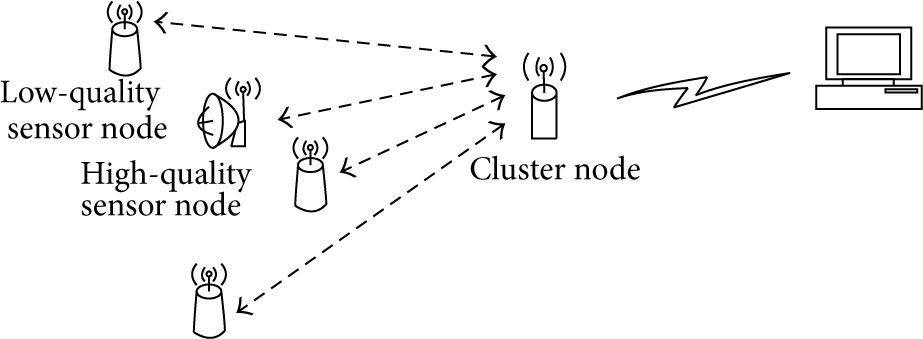
A heterogeneous wireless sensor network system.
There are two main phases in our method: the observation phase and the estimation phase. During the estimation phase, the high-quality sensor node is used to compare the decision made by itself with the decisions made by the low-quality sensor nodes as in Section 4. In this way, the performance parameters of the low-quality sensors can be estimated in limited steps. The high-quality sensor node is responsible for the task of detection in this period in order to ensure the system-level performance. After the estimation phase, the cluster node will get to know the parameters of each low-quality sensor node; then the high-quality sensor goes to sleep to reduce the energy consumption. The optimal decision fusion rules known as the Chair-Varshney rules are used to make the decision by combing the decisions made by the low-quality sensor nodes. However, the performance parameters of the low-quality sensor may change with the time, so the high-quality sensor node will be awaken when the cluster node makes the decision “1” in order to supervise the results of the optimal decision fusion rules. When the parameters of the low-quality sensor nodes change, the mechanism in Section 5 will detect the changes and go into the estimation phase to estimate the performance parameters of the low-quality sensors again.
3. Distributed Detection Model and Optimal Decision Fusion Rule
In this section, the distributed detection model is presented in order to fuse the decisions made by the low-quality sensor nodes during the observation phase. Suppose that N sensors are displaced in the observation area. Each sensor node processes its observation and makes the decision based on its observation. Then each sensor node sends its decision to the fusion center through the wireless channel. The fusion center makes the final decision based on some rules.
Here suppose that the a priori probabilities of the two hypotheses are denoted by

After making its decision, the sensor node sends its decision to the fusion center in order to make the final decision. The fusion center determines the final decision u based on these individual decisions:



From the equation, the optimal decision fusion rule needs the performance parameters of each sensor node like the detection probability and the false alarm probability. But in practice, the performance parameters of the low-end sensor can hardly be known due to its limited performance. The low-quality sensors are also easily affected by the environment. In order to use the optimal decision fusion rules, we need to know the performance parameters of these low-quality sensors in order to reach the optimal result.
4. Estimation of the Performance Parameters of the Low-Quality Sensors Using the Guidance Sensor
The method which is used to estimate the performance parameters of the low-quality sensors during the estimation phase is given in this section. Here we derive the estimated values of the performance parameters
We note that the detection probability of the high-quality sensor is
For low-end sensor i, the detection probability and the false alarm probability are
Suppose that the number of the estimation steps is M, and
During the estimation period, we suppose that
Then we have the following equations:




Consider (6);
From the above equations, we can get the estimated values of the unknown parameters

Then we can obtain the estimated values of the detection probability and the false alarm probability of the low-quality sensor i as follows:

Through the simulation in Section 6, we can see that the estimated values can coverage to the true values of the sensor parameters approximately, which proves the effectiveness of the methods. In addition, we can notice that as long as we know the parameters of the high-quality sensor node, we can estimate the performance parameters of the low-end sensor nodes even if the performance of high-quality sensor node is limited.
5. Adaptive Decision Fusion Using the Guidance Sensor
After estimating the detection probability and the false alarm probability of each low-end sensor node, we can use the optimal decision fusion rules to make the final decision in order to reach the optimal result. However, as the environment may change with the time, we need to adjust the estimated values of the parameters adaptively. If the performance parameters of the low-end sensor nodes change, then the optimal decision fusion rules may give the wrong decisions which affect the system-level performance.
In order to detect the possible wrong decisions made by fusing the low-end sensors, the high-quality sensor is supposed to be responsible for supervising the decisions made by fusing the low-quality sensors. Here a detection window (DW) is defined to tackle this problem in Figure 2. The detection window (DW) divides the whole sampling period into different parts as the figure shows. In order to detect whether the sensor parameters have changed, when the decision made by fusing the decisions of the low-end sensor nodes is “1,” the cluster node awakes the high-quality sensor node to make the decision about whether the event happens. Support that



Detection window illustration.
When the parameters of certain sensor nodes change, as the optimal decision fusion rules depend on the detection probability and the false alarm probability of each sensor node, the detection probability of the optimal fusing decision
The
The ratio
6. Simulation Results and Analyses
In this section, we assume one high-quality sensor and three low-quality sensors are deployed in the surveillance area to detect the event. Each low-end sensor node processes its observation and makes the decision about whether the event happens; then each sensor node sends its decision to the cluster node which can be thought of as the fusion center. This fusion center makes the final decision using the decisions gathered from the low-end sensor nodes based on the optimal rules. The high-quality sensor is used to supervise the fusing results during the observation phase and estimate the performance parameters of the low-quality sensor nodes during the estimation phase.
6.1. The Convergence of the Estimation Algorithm
In this simulation, we verify the estimation methods in Section 4. Here the detection probabilities of the three low-end sensor nodes are 0.9, 0.8, and 0.7 while the false alarm probabilities of the three sensor nodes are 0.3, 0.2, and 0.1. The a priori probabilities of the event are set to
In Figure 3, the estimated values of the detection probabilities and the false alarm probabilities of the low-end sensors can converge to the true values (the black dotted line) in limited steps. This result shows that we need limited steps to get the estimated value in practice which just cost limited resources of the sensor nodes.

Estimation of the performance parameters of the sensors.
6.2. Adaptive Decision Fusion with the Guidance Sensor
In this simulation, we show the adaptive algorithm with
The energy consumption is also considered; as all types of the sensor nodes observe, process, and send the 1-bit decisions to the cluster node, we simply assume the energy consumptions of the high-quality sensor node as
In Figure 4, the simulation gives the result of the estimated values of the performance parameters of the low-quality sensors in the whole sample steps; δ in Section 5 is set to 10% and ε is set to 0.02. From the figure we can see that when the performance parameters change, the adaptive algorithm can detect the change soon and the system goes into the estimation phase to estimate parameters again in order to ensure the system-level performance. The figure also compares the energy consumption between the three low-quality sensors with the guidance and only one high-quality sensor in the sensor network system. It can be seen that the adaptive algorithm reduces the energy consumption compared with the method using only one high-quality sensor.

Estimation of the performance parameters of the sensor in
As the algorithm calculates the ratio

Estimation of the performance parameters of the sensor in
In Figure 6, we change the

Energy consumption with the change of the size of the threshold.
In Figure 7, we change the probability of hypothesis

Energy consumption with the change of the a priori probability of hypothesis 1.
7. Conclusion
Wireless sensor networks usually consist of different kinds of sensors. The low-end sensors are cheap and consume little energy but the precision of each low-end sensor is limited and the performance parameters of the low-end sensors may change with the environment. The high-quality sensors like cameras are expensive and consume a lot of energy, but the precision of the high-quality sensor is high and the performance parameters of this kind of sensor are stable. In this paper, we use one high-quality sensor which can be thought of as the guidance sensor to estimate the performance parameters of low-end sensors online adaptively. Through the simulations and the analyses, we can see that the estimated values can converge to the true values without biases. This method is valuable as this system can achieve high precision and consume low energy in practice.
Footnotes
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Acknowledgments
This work was partially supported by the National Natural Science Foundation of China under Grant 61273112 and the 973 Program under Grant 2013CB733100.