
Abstract
Reliable event detection is one of the most important objectives in wireless sensor networks (WSNs), especially in the presence of faulty nodes. Existing fault-tolerant event detection approaches usually take the probability of faulty nodes into account and fusion techniques to weaken the influence of faulty readings are usually developed. Through extensive experiments, we discover a phenomenon that event detection accuracy degrades quickly when the faulty sensors ratio reaches a critical value. This problem has not drawn enough attention and a solution to the problem is our concern. In this paper, a spatiotemporal correlation based fault-tolerant event detection scheme (STFTED) is proposed, which leverages a two-stage decision fusion and spatiotemporal correlation to improve the event detection quality. In the low-level local stage, a location-based weighted voting scheme (LWVS) is developed to make decision fusion locally on each sensor node, which is based on neighboring nodes and the geographical distributions of two decision quorums. In the high-level global stage, a Bayesian fusion algorithm is adopted to reach a consensus among individual detection decisions made by sensor nodes. Simulation results demonstrate that the proposed approach is highly effective and a better quality of event detection can be obtained compared with the optimal threshold decision schemes (OTDS).
1. Introduction
Wireless sensor networks (WSNs) have been of great interest in recent years because of their various applications to environment monitoring [1, 2], battlefield surveillance [3], system health management [4–6], and so forth. One of the critical tasks in designing a WSN is to monitor, detect, and report useful events of interest in the network domain. A sensor node collects data from the environment by utilizing its sensing device [7, 8] and then preliminarily processes the raw data through the network to extract meaningful information before transmitting it to a fusion center, where the final decision is made on whether an event has happened or not. The crucial properties of event detection algorithms are the computational overhead (in terms of processing and memory usage) and scenario-dependent applicability. The overall goals of event detection algorithms are trade-off between minimizing communication overhead [9, 10] (and thus energy expenditure [11]) and maximizing the detection accuracy [12, 13].
In the event detection applications, nodes are responsible for determining whether a particular event of interest occurs in their sensing ranges. Theoretically, all sensor nodes in the event region should report the sensed information to base station or sink node. In fact, the sensor readings may be unreliable due to the noise interference or hardware failures and some erroneous local decisions derived from faulty sensor readings may be made. The sensor can provide a false alarm, which is a decision indicating an event occurred when it did not. The situation of a missed alarm is a decision indicating the absence of event when the event occurs. Both false alarms and missed alarms will reduce the detection quality. One approach to improve the ability of event detection is using fault-tolerant event detection schemes.
Fault-tolerant event detection algorithms are designed in a number of recent works [14–25], which can be divided into two categories. One is the faulty node measurement identification case and the goal is to identify the faulty nodes by comparing measurement from sensor nodes directly and making decisions [14–19]. The other is the case of decision fusion, which determines whether it is a faulty node by distinguishing the opposite conclusion with the majority [20–25]. Extensive experiments have been conducted to compare several classic algorithms. The results indicated that the quality of event detection degrades rapidly when the sensor's fault ratio reaches a critical value.
Many challenges exist to detect event efficiently. Firstly, it is challenging to develop a scheme for reliably detecting the interesting event under the circumstance of faulty nodes due to the fact that the node's reading is unreliable. Secondly, the quality of event detection degrades rapidly, which motivates us to optimize the fault-tolerant event detection scheme. Meanwhile, another challenge issue is to design a model which can characterize the spatial correlation of different scenarios.
To overcome the challenges, we propose a spatiotemporal correlation based fault-tolerant event detection scheme, called STFTED, which leverages a two-stage decision fusion and exploiting spatiotemporal correlation of sensor nodes. The low-level stage is conducted locally inside the sensor nodes with a location-based weighted voting scheme (LWVS). LWVS exploits the spatiotemporal correlation of sensor nodes, which is based on neighboring nodes and the geographical distributions of two decision quorums. The high-level stage aims at optimizing LWVS to solve the problem that the quality of event detection degrades rapidly. The high-level global stage employs a Bayesian fusion algorithm to reach a consensus among individual detection decisions made by sensor nodes.
The contributions of this paper are summarized as follows:
We propose a location-based weighted voting scheme, called LWVS, in the low-level local stage, exploiting the spatiotemporal correlation of sensor nodes. We propose a spatiotemporal correlation based fault-tolerant event detection scheme, called STFTED, to optimize LWVS in the high-level global stage, which can detect event efficiently without rapid quality degrading and can be applied to different scenarios. We conduct extensive simulations to evaluate the performance of the proposed algorithms. The results demonstrate the effectiveness of the proposed algorithms.
The remainder of the paper is organized as follows. Section 2 introduces some prior works in event detection. In Section 3, the system model and problem statement are briefly described. Section 4 presents the spatiotemporal correlation based fault-tolerant event detection scheme. Simulation results are shown in Section 5 and conclusions are made in Section 6.
2. Related Work
Many approaches of event detection in WSNs have been studied and the central concern is to improve the detection accuracy [15, 26–29]. The detection accuracy is limited by the amount of noise associated with the measurement and the reliability of sensor nodes. Sensor nodes are usually low-end inexpensive devices. Sometimes the sensor nodes exhibit unreliable behavior and sensor readings may make erroneous local decisions.
Existing approaches on event detection with faulty data can be divided into two categories, that is, 0/1-event based method and scalar-measurement based method. The first category determines whether a sensor node is faulty by answering a specific question: the event occurs or not. If a node makes an opposite decision with the majority, it is labeled as faulty. Since approaches in this category detect a faulty node by its “
With its simplicity, using “
In addition, the event detection algorithms have strong scenario-dependence in WSNs. Considering different scenarios, it is necessary to exploit spatiotemporal characteristics of sensors to detect the emergence of event accurately (eliminating faulty readings) and quickly convey this information to the sink node [30] (i.e., the base station). The focus of this paper is not on data gathering or communicating. Here, works based on the spatiotemporal correlation are discussed. Several works have been done to improve fault-tolerant algorithms by exploiting the spatial correlation of sensors. For instance, a weighted model of node decision based on distance for event region fault-tolerant detection was proposed by Li et al. [24]. In [16], confidence levels of sensor nodes were used to adjust the threshold for decision making and a moving average filter to fault tolerance. Besides, the geographical distribution of two decision quorums was taken into account for weighing neighbors' decisions [23]. There are also some cases which detect an event by using the spatiotemporal correlation, such as [29, 31, 32]. The three papers used a dynamic Markov random field model to model the spatiotemporal relationship of the evolving field and proposed a distributed algorithm to track the dynamic event regions.
The above approaches offer efficient methods to detect the event which is interfered by faulty sensor readings. However, they did not involve the problem about the quality of event detection. In monitoring applications, it is necessary to guarantee that nodes in the event region detect an event correctly. In our paper, a detailed analysis for the quality of event detection is carried out, and a solution to improve the quality is also proposed.
3. System Model and Problem Statement
This section provides an overview of our network model which contains some faulty nodes. It also covers the fault-tolerant event detection problem and the relationship between the quality of event detection and the ratio of faulty sensors.
3.1. Network Model
In the network model, each node has a sensor to detect the presence of an event by comparing the node's sensor readings with a fixed threshold. Considering that the presence of an event corresponds to a high sensor reading, a low reading indicates the absence of the event. The mean value of sensor reading in the presence of an event is
Define the following three binary variables which are similar to those in [21].
Thus, there are four possibilities for the node detective scenarios.
The sensor correctly reports a normal reading: The sensor faultily reports a normal reading (missed alarm): The sensor correctly reports an unusual/event reading: The sensor faultily reports an unusual reading (false alarm):
In this paper, we assume that the sensor fault probability
A sample scenario of the network model is shown as Figure 1. There is an event region with the interesting event occurrence. The above four possibilities of node detective scenarios are all included in this figure.
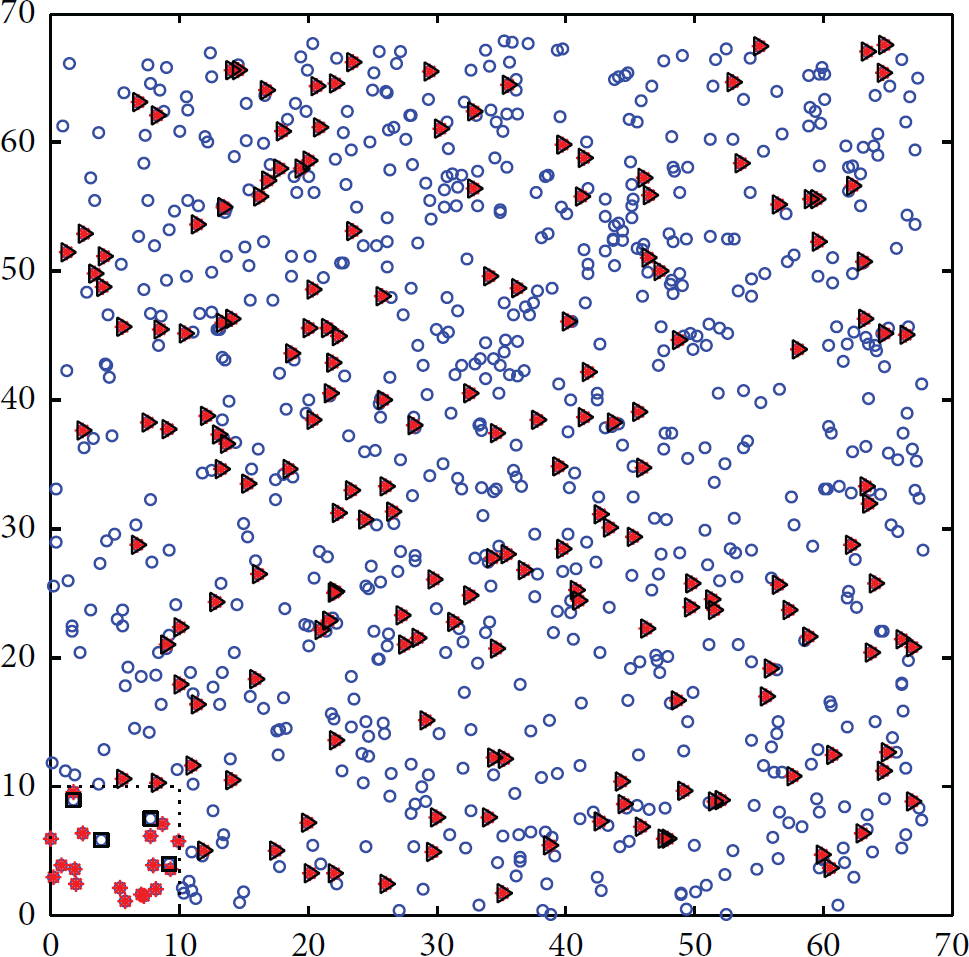
A typical sample scenario with uniformly distributed nodes shows some single-modality event occurred in an interesting region (enclosed inside the square with the bold line). “∗” denotes reporting an event, while “∘” denotes reporting no event, “□” denotes the missed alarm sensor, and “⊳” denotes the false alarm sensor.
3.2. The Fault-Tolerant Event Detection Problem
The problem is how to estimate
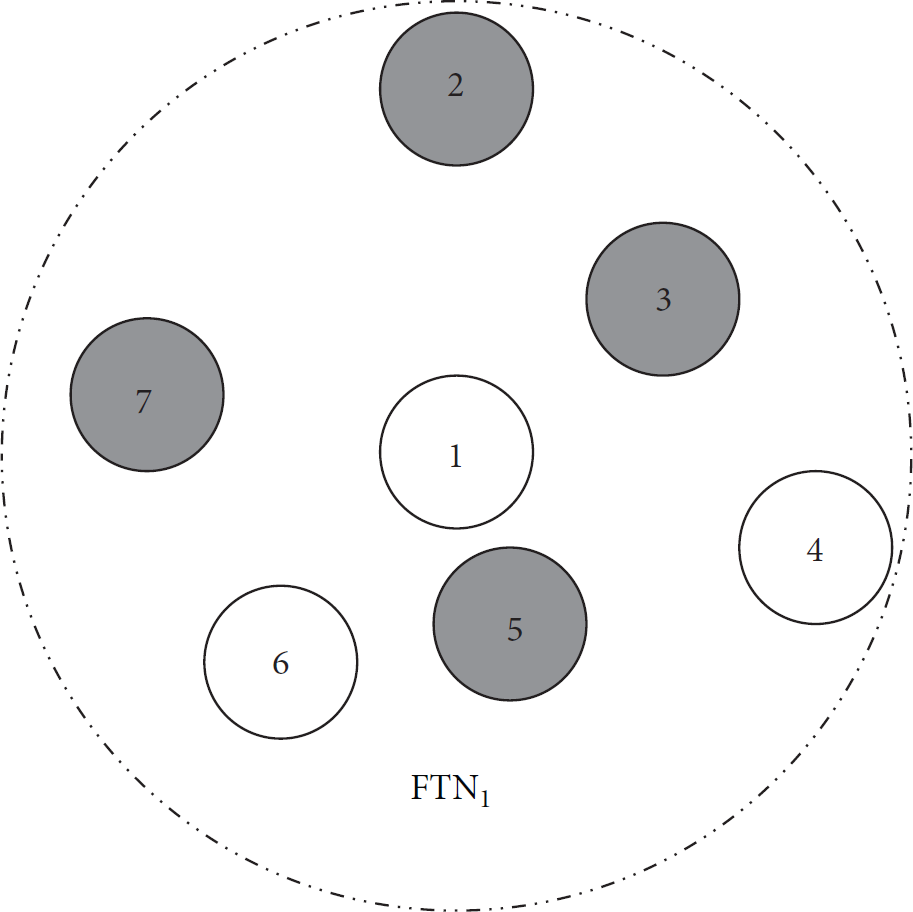
Define the fault-tolerant neighborhood,
Using the Abbreviations which are defined in the Summary of Notations for Analysis of Fault-Recognition, the problem is to find an estimation function that takes the values of the sensor states
With the increase of faulty sensors, the percentage of nodes in the event region which detect the event is decreasing. Theoretically, the detection percentage can be enhanced via fault-tolerant algorithms. Through extensive experiments, we discover that reality does not match the theory. Although the number of faulty nodes is significantly reduced via fault-tolerant schemes, the number of faulty nodes in event region does not change obviously. It means that event detection performance is not improved dramatically. Taking the optimal threshold decision scheme (OTDS) proposed in [21] as an example, Figure 2 shows a snapshot of the result of a sample simulation run when

A snapshot of the result of a sample simulation run when

A snapshot of the result after OTDS.
With different fault-tolerant algorithms, a large number of simulation experiments are conducted to evaluate the relationship between the quality of event detection and the ratio of faulty sensors. A phenomenon is discovered that the quality of event detection degrades rapidly when the sensor's fault probability reaches a critical value. OTDS is taken as an example to recount this phenomenon. The result was obtained by averaging over 1,000 runs under the different sensor fault probability p, which is presented in Figure 4. It can be seen that the event detection percentage only reduces less than

The relationship between the quality of event detection and the ratio of faulty sensors.
4. Spatiotemporal Correlation Based Fault-Tolerant Event Detection (STFTED)
A spatiotemporal correlation based fault-tolerant event detection scheme (STFTED) is proposed in this section, which is constituted by two-stage decision fusion that addresses the above problems. The first-stage decision fusion is conducted locally inside the sensor nodes with a location-based weighted voting scheme (LWVS). LWVS is established based on neighbor nodes and the geographical distributions of two decision quorums. The second stage is carried out in a high level and incorporates a Bayesian fusion algorithm to make a decision among individual detection decisions made by sensor nodes. The basic idea of the approach is shown in Figure 5.

The general concept of the approach in a form of block-diagram: the first-stage fusion of event region detection is conducted locally inside the sensor nodes, while the second stage is carried out in a high level (e.g., in a cluster head or a gateway).
4.1. Location-Based Weighted Voting Scheme (LWVS)
Spatiotemporal correlation is one of the significant characteristics of WSNs. Supposing that the samples from nodes are temporally independent, there should be a heavily dense deployment of sensor nodes in order to achieve satisfactory coverage. As a result, multiple sensors record information about a single event in the sensor field. Due to the high density in the network topology, spatial proximal sensor observations are highly correlated with the degree of correlation increasing with decreasing internode separation. In [33], several key elements are investigated to capture and exploit the correlation for the realization of advanced efficient communication protocols. Taking a node n which is estimated as the decision source, the distortion increases as the increasing of the distance between the node n and the neighborhood node k. Assuming both nodes a and b are in

The spatial correlation between nodes
Considering the correlation between nodes, a weighted model based on group node locations is defined. This model is a function of the geographical distribution of the decision group to which they belong. There are two decision groups

The likelihood test ratio is employed to develop this optimal estimation function that selects

Note that the estimator for LVWS is given by the following:
Choose Otherwise, choose
Proof.
The likelihood ratio is given by
Since

When
This corresponds to a weighted vote in favor of the hypothesis of
4.2. Bayesian Based Fault-Tolerant Event Detection
In the low-level local stage, an estimator
The estimator of nodes given by LWVS,
The estimator of nodes

Assume there are

Then the Bayesian formula of node

Note that the estimator for the stable event detection scheme is given by the following:
Choose Otherwise, choose
According to the above analysis on fault-tolerant event detection, we propose a spatiotemporal correlation based fault-tolerant event detection scheme to improve the event detection accuracy. The algorithm is formally presented in Algorithm 1.
(1) group (2) calculate (3) calculate (4) (5) set (6) (7) set (8) obtain (9) (10) count (11) calculate (12) (13) set (14) (15) set (16)
5. Simulation
In this section, a set of simulation results are presented to analyze the features of the proposed fault-tolerant approach and evaluations are compared with the OTDS proposed in [21]. The scenario consists of
Figure 8 shows snapshots of the results of a sample simulation run with different p. The sensor nodes are depicted by “∘”, and the nodes detect an event “
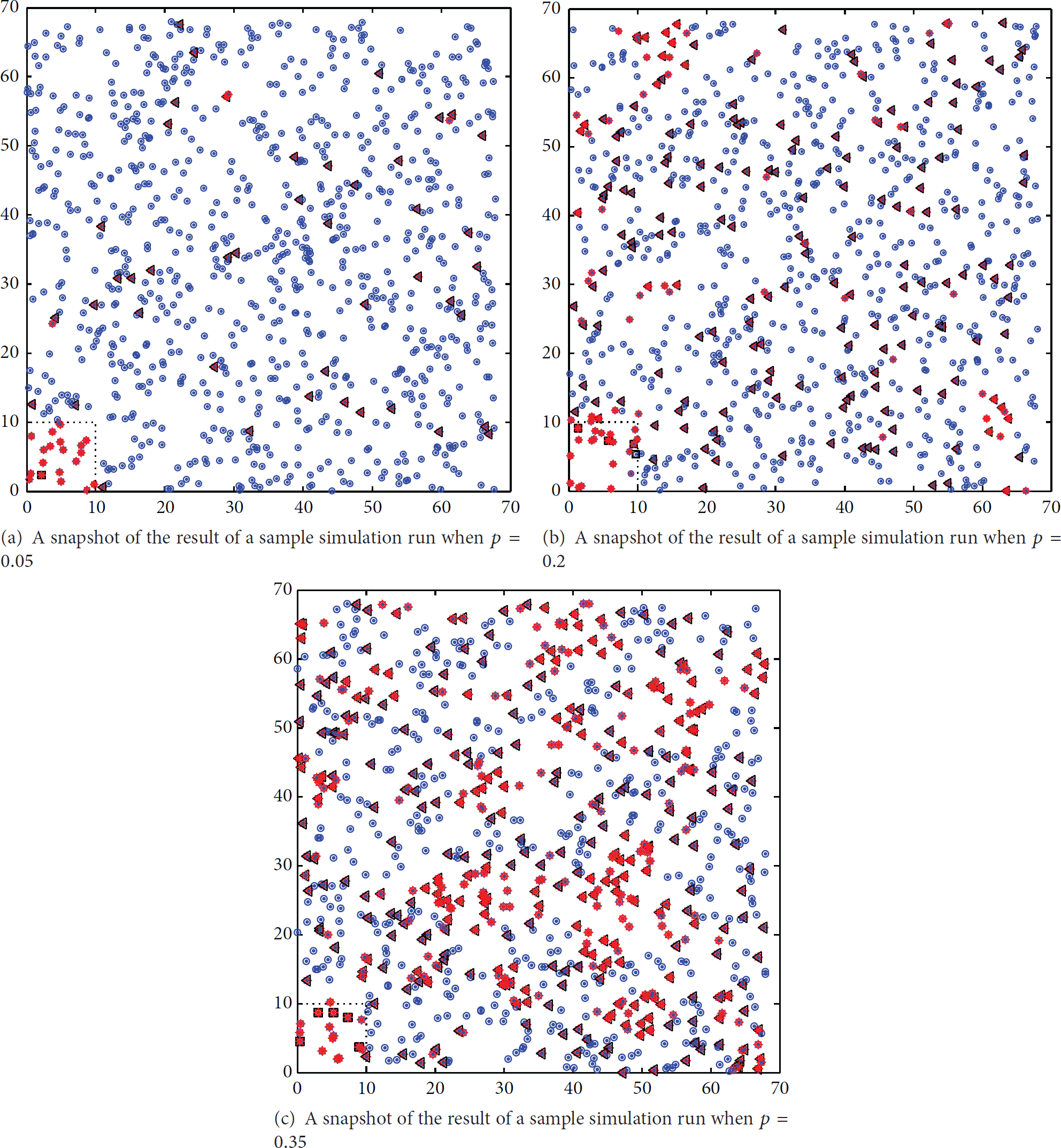
A snapshot of the result of a sample simulation run after the STFTED with different p.
Metrics defined in [21] are used to evaluate the proposed method by comparison with the OTDS proposed in [21] and the LWVS in the low-level stage, as mentioned in Section 4.
Number of Errors Corrected. Number of original sensor errors corrected by using the algorithm. Number of Errors Uncorrected. Number of original sensor errors uncorrected by using the algorithm. Number of Errors Introduced by the Solution. Number of new errors introduced by the algorithm. Number of Errors after Decoding. Overall number of errors after using the algorithm.
Since there is a linear correlation between the average number of errors uncorrected and that of those corrected, we only discuss the average number of errors corrected. Currently, the event detective and event region ensuring are the most concerned among all environment monitoring issues. Here, we provide a new metric, the average number of event detection in event region, to show the ability of the event detection. Nodes in the event region and the proportion of correctly detected nodes are particularly discussed as the following equations:

Note that these different metrics are normalized by the network size. We set α, β, γ, and δ as parameters to evaluate the algorithm, which are defined as follows.
α: the normalized number of nodes correctly event detected:

β: the normalized reduction in average number of errors:
γ: the normalized number of nodes detecting errors corrected:

δ: the normalized number of nodes detecting new errors introduced:

The effect of one parameter, the nominal local detection error probability level, on these metrics is studied. In Figures 9(a) and 10(a), the normalized number of original errors detected and correctly event detected using the fault-tolerant algorithm is plotted as a function of the normalized error probability. These graphs show the quality of event detection optimized by the fault-tolerant event detection scheme. The simulation results shows STFTED be with a high effective performance. More concretely, α of STFTED keeps above

Metrics versus nominal error probability for LWVS and STFTED.

Metrics versus nominal error probability for OTDS and STFTED.
Other metrics as functions of the nominal probability are shown in Figures 9 and 10. To optimize the low-level local stage decision fusion for the fault-tolerant event detection, we propose the high-level global stage fusion. In Figure 9, it can be observed that STFTED makes δ obviously optimized, and β has been optimized when
Finally, through many simulations with the collecting nodes data, the adaptability of STFTED in various environments is simulated. In environment monitoring, any change of the environment or network is responded by the sensor readings. Assume the mean value of the sensor reading for the presence of an event is

A snapshot of the result of a sample simulation run when
In Figure 12, supposing that σ is ranged from

Metrics responded to heterogeneous networks for OTDS and STFTED.
6. Conclusions
In this paper, a spatiotemporal correlation based fault-tolerant event detection scheme (STFTED) is proposed for the binary event detection in WSNs. Our approach aims at improving the quality of event detection and reducing the scenario-dependence and offering a solution for the problem that the ability of event detection degrades rapidly when the sensor fault probability reaches a critical value.
The simulations indicate that STFTED has good performances in event detection under various scenarios. Extensive simulation results demonstrate the effectiveness of STFTED and show that STFTED achieves better performance of event detection than OTDS. It has been found that the normalized number of nodes detecting event is above
Although this scheme can effectively detect a single event, the ability of tolerant false alarm needs to be further studied. When multiple events occur in a region, the performance of the proposed approach needs to be penetratingly investigated. Future works will be focused on optimizing the proposed method to meet multi-modality event detection in WSNs.
Footnotes
Abbreviations
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Acknowledgments
This work was supported in part by the National Natural Science Foundation of China (NSFC) under Grant no. 51279151, the Natural Science Foundation of Hubei Province under Grant no. 2015CFB203, the Fundamental Research Funds for the Central Universities under Grants no. 2014-ZY-142 and no. 2042015kf0016, and the Natural Science Foundation of Jiangsu Province under Grant no. SBK2015041489.