
Abstract
The issue of node localization is a fundamental problem in wireless sensor networks. Recently, the localization problem for mobile sensor networks in hostile environment has received significant attention. Due to the mobility of the sensor nodes, it is more challenging to achieve node localization in attacked sensor networks than in static ones. To address these challenges, the paper presents a novel game-based secure localization algorithm. The nodes' strategy level can be indicated through the results of trust evaluation and then by means of constructing reasonable strategy space and payoff function using game theory; all kinds of nodes within the network can achieve the optimal payoffs. The performance of our algorithm is evaluated by extensive simulation experiments. The simulation results show that the localization error of our proposed algorithm is lower than those of the existing ones in attacked environment.
1. Introduction
With the development of microcomputer technology, mobile wireless sensor networks (MWSNs) are widely used in many fields, such as underwater sensor, border detection, and animal tracking [1, 2]. Location awareness is very important because many applications of MWSNs depend on the information of locations of sensor nodes. Localization is to obtain the nodes position [3, 4].
In most existing sensor networks, nodes are static. However, in some modern applications, localizations become a difficulty, when nodes are moving and being attacked [5]. A mobile node is unable to receive location information rapidly and accurately when it is attacked [6]. The false coordinates or distance estimation will cause a major localization error for normal sensor nodes. In this case, some methods should be explored to eliminate or reduce the adverse influence caused by malicious beacon nodes and ensure safe localization in mobile WSNs.
In this paper, we propose a game-based security localization (GSL) algorithm for solving the mobile node self-localization problem with the existence of malicious node. Firstly, node in multiple hop transmission decides the behavior grade according to the time and space information. Secondly, according to the behavior grade, the complete multirisk level strategy space is constructed and is updated over time. Finally, node selects a behavior grade to obtain optimal benefits. Simulation experiment results show that the algorithm can effectively restrain node's malicious behaviors and boost the cooperation ability of the network. The localization error with GSL is lower than those without GSL in mobile and attacked environment.
The remainder of this paper is organized as follows. Section 2 introduces related works on secure localization algorithms. Section 3 presents the network model, attack model, and game model. Section 4 provides the detail of GSL algorithm. Section 5 presents the simulation results and Section 6 concludes the paper.
2. Related Works
The research in security localization algorithm for wireless sensor networks is mainly divided into two methods. The first method is based on sensor nodes. It can prevent nodes from being affected by the attack through the establishment of protection mechanisms (Verifiable Multilateration, SeRLoc, etc.), or removing malicious nodes from the network using the effective detection and filtering methods (DRBTS, ARMMSE, and a voting-based algorithm, etc.). The second method is based on security equipment. It can improve the defense capability of the network by adding security equipment in the physical layer.
Lazos et al. [7] present a robust positioning system called ROPE which utilizes a location verification technique to identify the location claims of the sensor nodes before data collection.
Yang et al. [8] analyze the outlier data detection problem and design a stray monitoring algorithm based on general cycle bilateration, which reduced to data from the group to improve localization accuracy.
Yu et al. [9] propose a BRS-based robust secure localization (BRSL) algorithm, aiming at reducing the impact of the malicious attackers in the network. The BRSL method includes two phases: the setup trust evaluation framework and the localization stage.
Wei and Guan [10] introduce a novel scheme called a lightweight positioning verification algorithm (LPVA); it does not rely on dedicated hardware equipment under the condition of network attack resistance and can be used in the low-cost network.
Xiao et al. [11] propose a robust network localization algorithm call RobustLoc, based on a robust patch merging operation that can reject outliers for both multilateration and patch merging.
The above studies mainly eliminate the fake beacon information (ROPE, RobustLoc, etc.) or detect malicious nodes (LPVA, BRSL, etc.) or increase equipment to improve localization accuracy but seldom deal with action information of sensor nodes, when nodes are mobile. Our proposal utilized an improved game theory and the sensor nodes' pluralistic behavior in the network to establish a trust-preferential strategy, which make the beacons cooperate effectively.
3. Network Model
3.1. Network Environment
In an environment under attack, a mobile wireless sensor network consists of anchor nodes, unknown nodes, and malicious nodes; nodes with known coordinates are called anchor nodes, nodes whose coordinates are unknown are called unknown nodes, and nodes which are captured and possibly attack are called malicious nodes. All nodes are randomly distributed in the two-dimensional space of the network and on the move.
As shown in Figure 1, the communication radius of each node in the network is represented by r and the maximum moving speed is represented by

Attack model with long attack distance.
3.2. Attack Model
In the sequential Monte-Carlo localization algorithm, coordinates of unknown nodes are calculated through sample set [12]. The unknown node will select locations of anchor nodes within single hop and two hops as members of the sample set, and therefore the accuracy of location information of anchor nodes within this scope determines the accuracy of positioning [13]. The attack models used in this paper are shown in Figures 1 and 2. The unknown node N can monitor the information of anchor nodes (

Attack model with short attack distance.
In a multihop network, we use T to represent the time of each hop. For the unknown node N, the distance between it and
3.3. Game Model
3.3.1. Game Participants
In the process of mobile positioning, every unknown node will obtain the information of beacon nodes within one hop or two hops [14]. For attacks which may exist in data transmission links, all nodes involved in the transmission of information are game participants. Therefore, participants in the game model include information sender T, information recipient R, and n information forwarders E. Throughout information transmission, the data sent by the sending node may travel through n forwarding nodes to reach the receiving node, so the number of participants of the game is
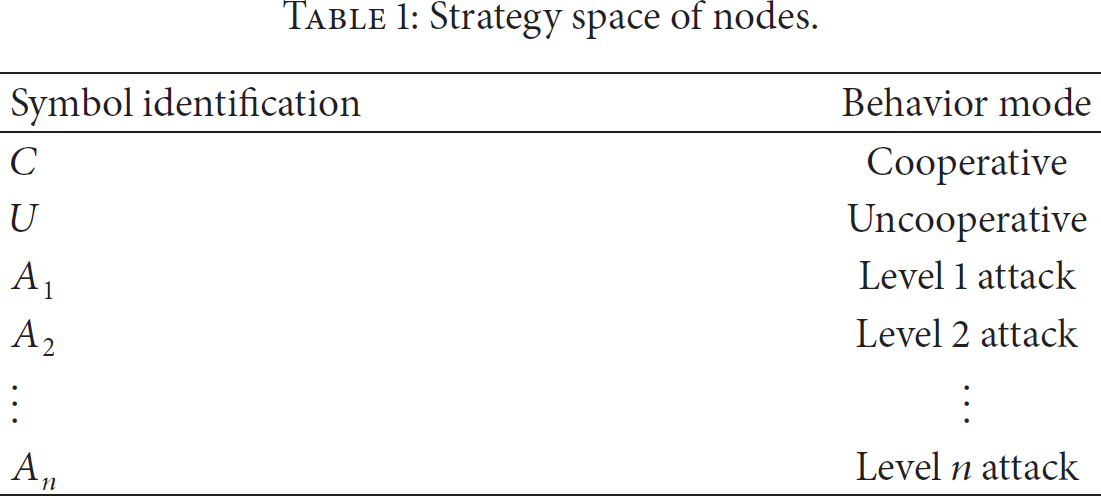
3.3.2. Strategy Space
In this paper, we define the strategy space according to the different behaviors of nodes. Node behaviors include cooperative, uncooperative, and attack behavior. According to the different attack effect, the attack behavior is divided into n level, and the attack level is determined by the attack effect. For example, the influence of the attack in Figure 1 is much greater than that in Figure 2, so the attack level in Figure 1 is higher than in Figure 2. We divide node actions into multiple levels according to their effects. We call the behaviors taken by nodes, which are shown in Table 1, strategy space.
Strategy space of nodes.
In the strategy space set of nodes
3.3.3. Game Payoff
In the game process of transmission of positioning information, the payoff of a participant after choosing a strategy at the moment of t can be
3.3.4. Trust Level
In the attack models mentioned above, the attacks are characterized by changing time reference and tampering with the spatial reference. Changes of time reference reflect on the increase of the number of hops from the beacon node to the receiving node. Information of each anchor node obtained by unknown nodes has time weights which can be used to determine attack payoff. The bigger the time weight is, the greater the attack payoff will be, and so the higher the influence of attacks on the accuracy of coordinates of unknown nodes will be. In Figure 1, the malicious coordinate data of the beacon node
Dempster Shafer (abbreviated D-S) evidence theory is adopted in this paper to calculate the trust values [15] based on the data information of time and space. Trust levels are defined by trust values. We use three variables, Measurement analysis of behavior of time parameter. Assuming that Measurement analysis of behavior of spatial parameter. To represent the Euclidean distance between any two beacon nodes, we use Quantitative classification of trust levels. If there is information of n anchor nodes around the unknown node, we can determine the quantized values of each node based on the measurement of time and space with the following formula:
In our scheme, a distinguished framework


3.3.5. Level Mapping
By the above methods, the time and space parameters of mobile positioning can be converted into trust levels, and a parameter M can be determined in the trust levels of each node, where

Action-trust based mapping rule.
4. Game Calculation with Strategy Evolution
4.1. Strategic Game
Every node has a trust vector
We assume that in the process of positioning the behavior of the information sender is identified as i and the behavior of participating node is identified as j, where 
For a node, the purpose of adopting strategic game during positioning is to choose a behavior with higher trust degree through behavior identification, thus achieving the best positioning results. According to this rule, the expected behavior of each node which participates in the game is 
4.2. Update Mechanism
At the initial phase, the node has a higher willingness to collaborate, and its initial trust vector is defined as
The update equation of the trust vector can be expressed as


4.3. The Conditions of Game Equilibrium
In the process of mobile localization, the steady-state convergence condition of the above mentioned game model is solved by means of evolutionary game ideas and principles for maximizing payoff. According to the evolutionary game theory, when the system is in initial operation, each member node n that participates in localization selects the appropriate action participation way in accordance with the expectation action space 
The sufficient condition for the evolutionary convergence is proven in the literature, and ultimately the acquired game convergence condition is

5. Performance Evaluation
5.1. Simulation Setting
In this section, we designed a mobile network simulation experiment to verify the effects of the trust game-based mobile localization method on cooperation and localization performance of the mobile sensor network node and conducted the simulation in Matlab. The default setting is with 5,000 nodes deployed and moving within the
Default parameter settings.

5.2. Simulation Results
The simulation has analyzed the effect of the game algorithm on node cooperation. In the case of different ratios of malicious nodes (20%, 40%, and 60%, resp.), the situations of nodes participating in cooperation via game are shown in Figure 4. The Figure shows that, with the increase of the game number, the ratio of nodes which select cooperation also increases. Finally, the ratio value of nodes which select cooperation tends to be stabilized. In the initial state, the ratios of malicious nodes are 20%, 40%, and 60%; after the game is stable, the ratios of cooperative members have been raised from 45.8%, 36%, and 19.6% to 83.9%, 78.6%, and 72.4%. Simulation results show that the algorithm can effectively improve cooperation of nodes, ensure transmission of localization data, and maintain the proper work of the network even under the situation of malicious attack. In the case of different ratios of malicious nodes (20%, 40%, and 60%, resp.), the mobile game-based secure localization (GSL) algorithm and the mobile localization algorithm without using the game are compared, as shown in the figure. Figures 5 and 6 show the situations of localization accuracy under the 20%, 40%, and malicious nodes coverage conditions. It can be clearly seen from the figure that by using the game approach the localization accuracy has been improved significantly, and the rate of improvement reaches about 20%–50%. Meanwhile, for network environment with a higher ratio of malicious nodes (60%) (Figure 7), the localization results can converge to achieve localization in harsh environments by applying this algorithm. Simulation results show that the game-based localization algorithm can effectively inhibit aggressive behaviors of malicious nodes and improve the localization accuracy of mobile nodes. We compare the following three methods in the simulations: the GSL algorithm (the game theory is used); the DBSL algorithm (the improved D-S fusion method is used [15]); the BRS-based robust secure localization (BRSL) algorithm [9]. Figure 8 shows the comparison results of localization error under different malicious ratio. The proportion of attackers ranges from 5% to 60%. As the number of attackers increases, the localization error increases as well. GSL can obtain more accurate results compared with DBSL and BRSL. In particular when malicious ratio is high, GSL has better inhibition effect on attacker's number.

The overall effect of cooperative performance under various original malicious ratios.
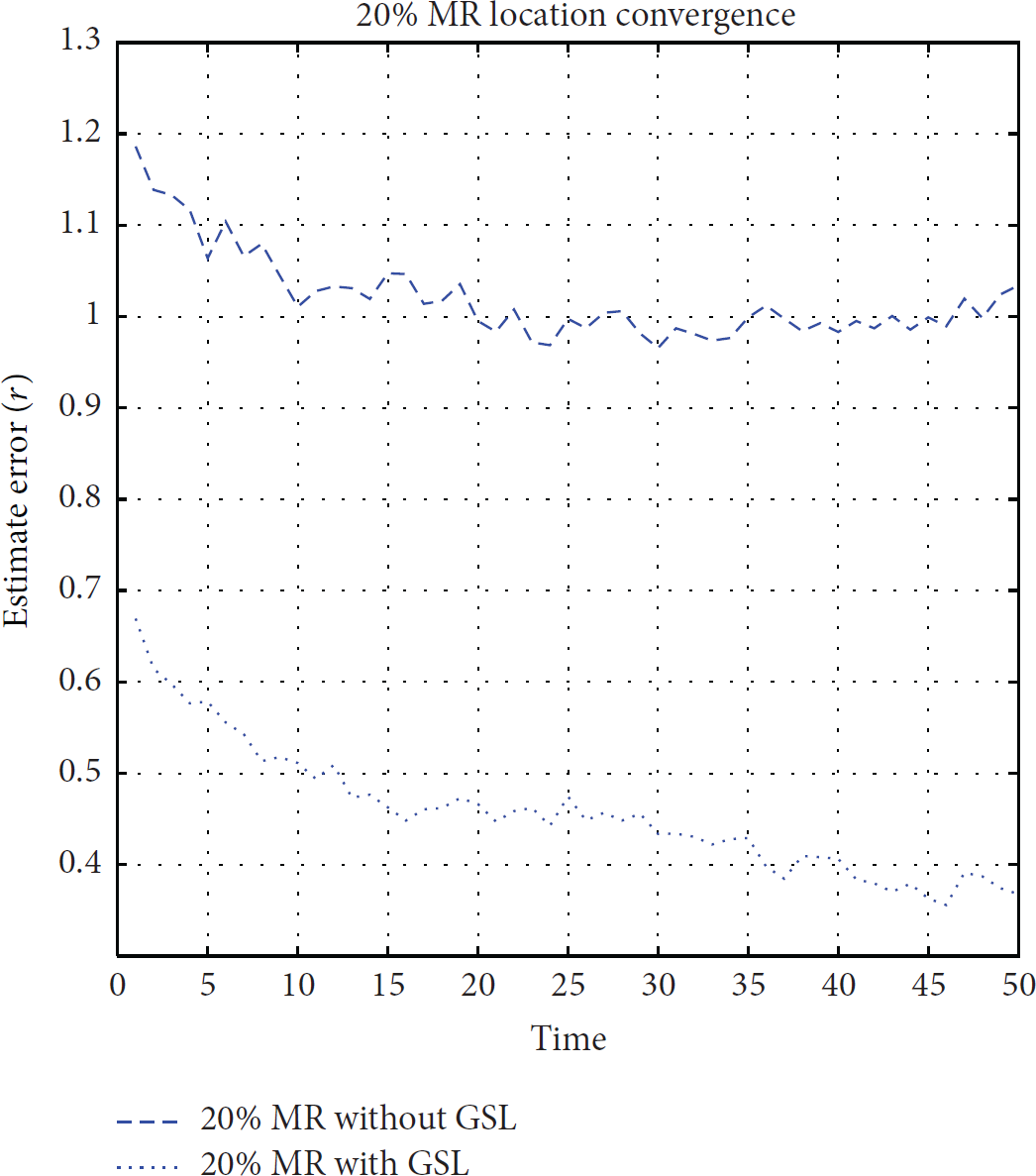
The effect of localization under original malicious ratio 20%.

The effect of localization under original malicious ratio 40%.
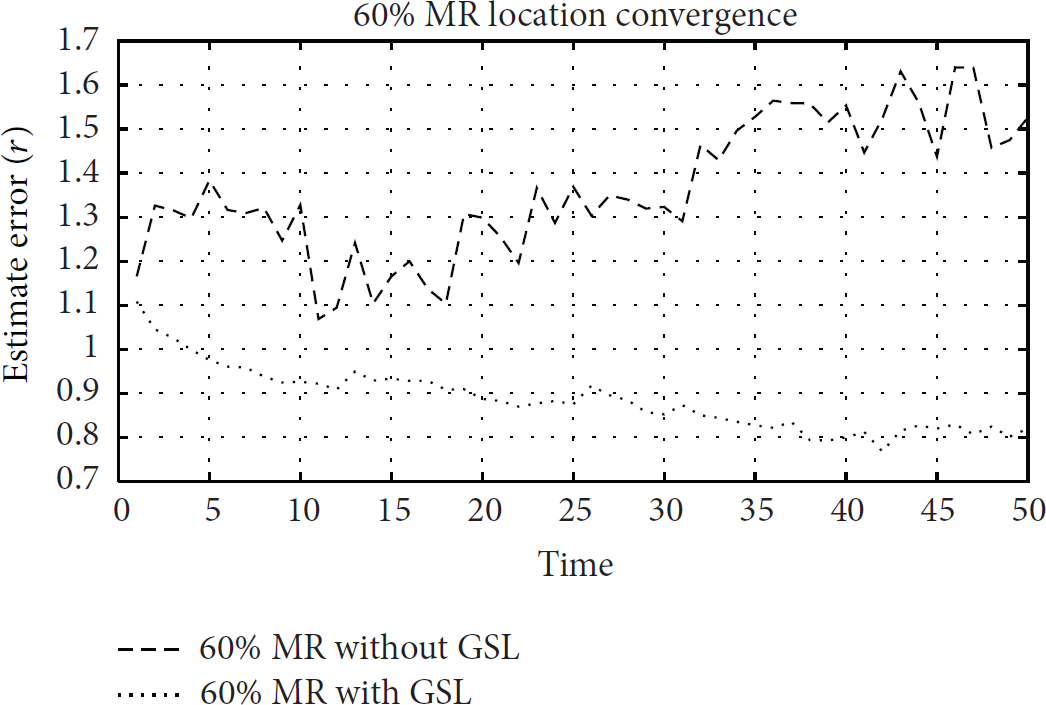
The effect of localization under original malicious ratio 60%.

The comparison results of localization errors under different malicious ratio.
6. Conclusions
This paper presents a mobile network node localization algorithm based on game strategies. Features are extracted under the situation of the mobile sensor network being attacked and the mapping relation between the attack level and the trust level is established. At the same time, trust and cooperation model and the payoff space of the strategy game are built, effectively suppressing the behavior of malicious nodes in network. Finally, the game update mechanism and equilibrium conditions are provided to ensure the stability and convergence of the algorithm. Simulation results show that the proposed mobile node localization algorithm based on game strategies takes full advantage of the dynamic characteristics of the algorithm and motivates cooperative behavior of member nodes; this algorithm can achieve nodes' localization and improve localization accuracy in harsh environments, especially in the situation with a higher ratio of initial malicious nodes.
Footnotes
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Acknowledgments
The authors are grateful to the anonymous reviewers for their industrious work and insightful comments. This work is supported by Natural Science Foundation of China under Grant no. 61371135.