
Abstract
A wireless sensor network (WSN) model by analyzing the limitations of existing localization algorithm is proposed in this paper. Specifically, neither the anchor nor the ID is required in the proposed model, and the node function is limited. The hardware function of the node in our model is independent of the MAC protocol. Moreover, based on the proposed WSN model, we design an energy efficient anchor-free localization algorithm for no-identity WSN. Instead of multiple measurements, mathematical calculation is adopted to acquire the position information. Subsequently, the effectiveness of the algorithm is confirmed by rigid theory. The simulation results show that the proposed algorithm can improve the performance of localization and energy efficiency in WSN significantly.
1. Introduction
Wireless sensor network (WSN) is a special kind of Ad hoc network [1], and it is usually applied in the areas which are difficult for wiring or power supply, depopulated regions (e.g., pollution, environment that cannot be destroyed, or hostile areas), some other emergency circumstances (such as natural disasters and damage of the fixed communication network), and so forth. The WSN does not need the support of fixed network. Moreover, it has characteristics of easy deployment, robustness, self-organization, and so forth [2, 3]. And hence, it has attracted wide attention and has been applied widely in military, industry, traffic, environmental protection, healthcare, and other fields [4–6]. Generally, WSN is composed of numerous cheap and tiny sensor nodes whose functions are relatively weak, and it interacts with the outside world using the gateway. WSN is usually deployed in a target area in the form of multihop network, which is dynamic, wireless connected, and self-organized. The main function of WSN is to collect and monitor physical or environmental conditions in the target area and send the information through the network to the end users [7]. Normally the sensor nodes and gateway are stationary once their deployment completed, and this is the main difference between the Ad hoc network and the WSN. Sensor nodes, perceptual objects, and the end users constitute the three elements of sensor networks [8].
Different from traditional networks, the nodes of WSN are randomly distributed in the sensing area and do not have wired connection and their positions and connectivity can be managed and maintained by routers or other equipment [9–11]. The energy and computing ability of node are limited; furthermore, the direct communication distance between nodes is short, and hence the complex operation cannot be done by the sensor node [12–14]. WSN needs operations (such as neighbor relationships discovery, nodes location calculation, and dynamic routing selection) to realize the discovery of network structure. Considering the localization problems mentioned above, it is necessary for each node to obtain the following information in the initialization stage: sink node position, neighbor node ID, and the distances and angles between neighbor nodes. And then, the information is used to calculate their relative positions or absolute positions in the network.
As mentioned above, ID is usually necessary for localization method, but it limits the flexibility and scale of the network. However, there is almost no research on no-identity WSN in existing localization algorithms. In this paper, we propose a network model without setting ID information. On one hand, the node function is weakened, so that the network can complete communication and localization regardless of node ID information. On the other hand, we increase the flexibility of the entire network; that is, instead of obtaining the global information through the sink node, the local information of nodes is used to maintain the network.
In this paper, we propose an energy efficient anchor-free localization algorithm for no-identity WSN. The rest of this paper is organized as follows. In Section 2 we analyze the related researches on WSN localization problem. The proposed WSN network model is presented in Section 3; moreover, a detailed design of a localization algorithm is proposed based on this model. In Section 4, the proposed algorithm is analyzed theoretically. Then, simulations and experimental results of the algorithm are provided in Section 5. Finally, we conclude the paper in Section 6.
2. Related Work
2.1. Methods of Distance and Angle Measurement
The locations of the sensor nodes can be classified as absolute locations (i.e., the coordinate in world coordinate system) and relative locations (i.e., the coordinate within the sensing area). In general applications, the relative positions of nodes within the entire network are usually needed to distinguish nodes. The essence of localization is to obtain the position of the sensor nodes. However, the locations of the sensor nodes and the distances between each node are unknown in the initial stage, which can be obtained via measurement and calculation.
Ranging technologies include RSSI (Received Signal Strength Indication), ToA (Time of Arrival), and TDoA (Time Difference of Arrival) [15]. These methods are mainly based on the hardware implementation; that is, the hardware devices are employed to detect transmission signal and calculate distance. RSSI calculates the distance based on the energy loss of wireless signal transmission; that is, the receiver detects the signal strength after receiving the packet, and the distance between the sender and the receiver is calculated according to the degree of signal attenuation [16]. In RSSI, it is easy to implement since the hardware requirements are not high, and the measuring error is relatively small. However, the path loss coefficient has to be set in this method, which is greatly influenced by the environmental change. ToA calculates the distance between the sender and the receiver according to the signal propagation time. This approach requires the synchronization of the sender and receiver, which is difficult to achieve under the distributed environment of WSN. Then, TDoA is proposed to overcome this defect. In TDoA, the distance is calculated by the Time Difference Of Arrival, and the sender needs to send two data packets in two different frequency bands, such as radio spectrum and infrared wavelengths, and then the difference of packet arrival time is used to calculate the distance [17]. This method avoids the synchronization problem, which is easy to be deployed in a distributed environment. However, the measuring error is relatively large, and the energy consumption is huge.
Similarly, hardware is used to realize the angle measuring technologies. The basic idea is that the receiver perceives arrival direction of signal by antenna array or other devices to calculate the relative angle between the receiver and sender. Finally, the node location can be calculated through triangulation method [15, 16]. The challenge of this method is how to transform the local angle information into unified global angle information.
2.2. The Existing WSN Localization Algorithms
The existing localization algorithms can be classified into anchor-based algorithms and anchor-free algorithms. Anchor is a node with localization device. Energy, information transmission capacity, and computing power of anchor are not restricted. The core of the anchor-based algorithms is that the anchors broadcast localization information to the network, and the locations of the sensor nodes are obtained by comparing and calculating the information received from different anchors. These algorithms have the advantages of high accuracy, less energy consumption, and low computation complexity. But the biggest drawback is that the anchor nodes need to be deployed on the special location of sensing area, which limits the scale and scope of the sensing area. Furthermore, the deployment flexibility is poor and the hardware cost is high. So the research on this kind of algorithm is limited. Anchor-free algorithms are research hotspots currently, and the core idea is to replace the anchor using the sink node. The sink node sends angle information, distance information, and so on to sensor nodes, and sensor nodes use such information to calculate their locations themselves. The anchor-free algorithms overcome the inflexibility of the anchor-based algorithms, but it needs a lot of communication and computation of sensor nodes, which aggravate the nodes energy consumption. Then, the network lifespan is reduced, and the error is relatively big.
WSN localization algorithms are proposed based on the angle and distance measurement methods as mentioned in Section 2.1, and the information of neighbor node is mainly used to do localization. Čapkun et al. proposed a Self-Positioning Algorithm (SPA) in [18]. The algorithm used the distances between the nodes to build a relative coordinate system in which the node positions were computed. However, the SPA algorithm required a lot of computation and communication between nodes in the process of positioning, and the computational complexity increased with the number of nodes by exponential growth, which was not suitable for large-scale network.
Iyengar and Sikdar analyzed the defects of the SPA and proposed a Scalable and Distributed GPS Free Positioning for Sensor Networks (SDGPSN) [19]. The algorithm adopted the distributed concept, and cluster head was used to establish global coordinate system, which accelerated the execution speed and reduced the computational complexity. Therefore, SDGPSN was more suitable for large-scale network deployment. But the localization error would be accumulated during clustering, which led to low global localization accuracy. Moreover, huge communication was required in this algorithm, and this resulted in large energy consumption.
The anchor-based algorithms have been described previously. Youssef et al. proposed an Accurate Anchor-Free Localization (AAFL) algorithm based on clustering [20]. The localization efficiency was ensured without the help of anchor, and the localization error was small. However, high connectivity of the network was required in this algorithm, and hence the flexibility of the network structure would be affected. Furthermore, the communication burden of the edge nodes would be larger than other nodes, and the life span of the network would be affected since the edge nodes were exhausted earlier due to overuse.
Qu and Wicker proposed a lightweight anchor-free localization-routing algorithm on the view of a special application, which sets the sensing area as a circular form and the sink node to be located in the center point [21]. In order to realize routing selection, the neighbor node list information would be formed during localization. But the localization accuracy of the algorithm was not high, and the error would be accumulated in each node. Consequently, the algorithm had a strict application background, which was out of universality. And the routing selection was simple, which could not realize the global dynamic adjustment.
In 2008, Jordt et al. proposed an anchor-free localization algorithm which could obtain the sensing range [22], and the algorithm achieved accurate localization without using anchor. Similar to the algorithm in [21], in order to realize the global unification, the location information of sink node was used to adjust local coordinate system. Compared with the algorithm in [21], the localization of this algorithm was more accurate. However, the communication cost was high, and the energy efficiency was low since the energy consumption in positioning stage was excessive.
An algorithm named LOCOMOTE was proposed in [23] to realize data transmission and localization at the same time, which had the advantages of simplicity, high robustness, and good dynamism. However, all the nodes should communicate directly with the sink node, which limited the scale of the network significantly. Additionally, the energy consumption of flooding transmission was too large, and the energy efficiency was relatively poor.
In [24], the researchers added a few shortcuts to reduce the average energy expenditure per sensor node, and hence, energy efficiency and accurate localization have been achieved. In [25], RSSI was used to improve the localization accuracy, coverage, and robustness. References [26–28] described some methods for WSNs to self-locate in indoor environments. Moreover, mobile anchor was proposed to help localization in [29, 30]. Some improvements had been achieved, but anchor was still necessary in the proposed algorithms.
Although existing anchor-free localization algorithms can solve the localization problem without anchor node, there still exist some defects, such as high computation complexity, low localization accuracy, and lack of theoretical support. Furthermore, most of the existing researches focus on improving the localization accuracy, and hence the node energy consumption problems have been ignored, which leads to low energy efficiency in these algorithms. Therefore, how to realize fast, accurate, and energy efficient node localization based on limited information is the focus and trend of future research.
3. The Proposed Algorithm
3.1. System Model
Firstly, the characteristics of the system model are introduced in detail:
All the nodes in the network are deployed randomly, so that the network can be used in any environment. The structure of the network is flexible, and the nodes can be deployed according to practical application, which is not limited by the algorithm. The network has only one sink node, and the computing power, communications power, storage capacity, and energy of sink node are not limited. The sink node is the interactive interface of WSN with the outside world, which is the typical characteristic of WSN structure. With only one sink node, information transmission security and energy saving will be guaranteed. The sensor nodes in the network are identical. All the nodes are not set ID and they have the same computing power and primary energy. And hence the network structure is more flexible as the nodes can be deployed randomly. The sensor nodes in the network are not equipped with positioning device, and the coordinate systems of nodes are not uniform in initial stage. So the hardware costs will be saved, and it will be easy to deploy large-scale nodes. In addition, the flexibility of the network deployment has been improved. The information transmission channel is symmetrical; that is, the energy consumption from A to B is the same as that from B to A, which is determined by the characteristics of wireless signal transmission. The transmission energy can be controlled by the nodes independently in accordance with the transmission distance. This function is controlled by the system-on-a-chip of sensor node, and now some embedded systems for WSN can realize this function. Conflict control and channel assignment are carried out by the MAC protocol, which is not considered by the localization algorithms.
3.2. An Energy Efficient Anchor-Free Localization Algorithm
Since the sink is unlimited in energy and transport capacity, we set it as the origin of the global coordinate system. The active packets are transmitted by the sink in the form of broadcasting. After receiving active packets, the distances and angles between the sensor nodes and the sink will be calculated. Equation (1) is the path loss formula in free space, where





Neighbor node list.

The structure of packet.

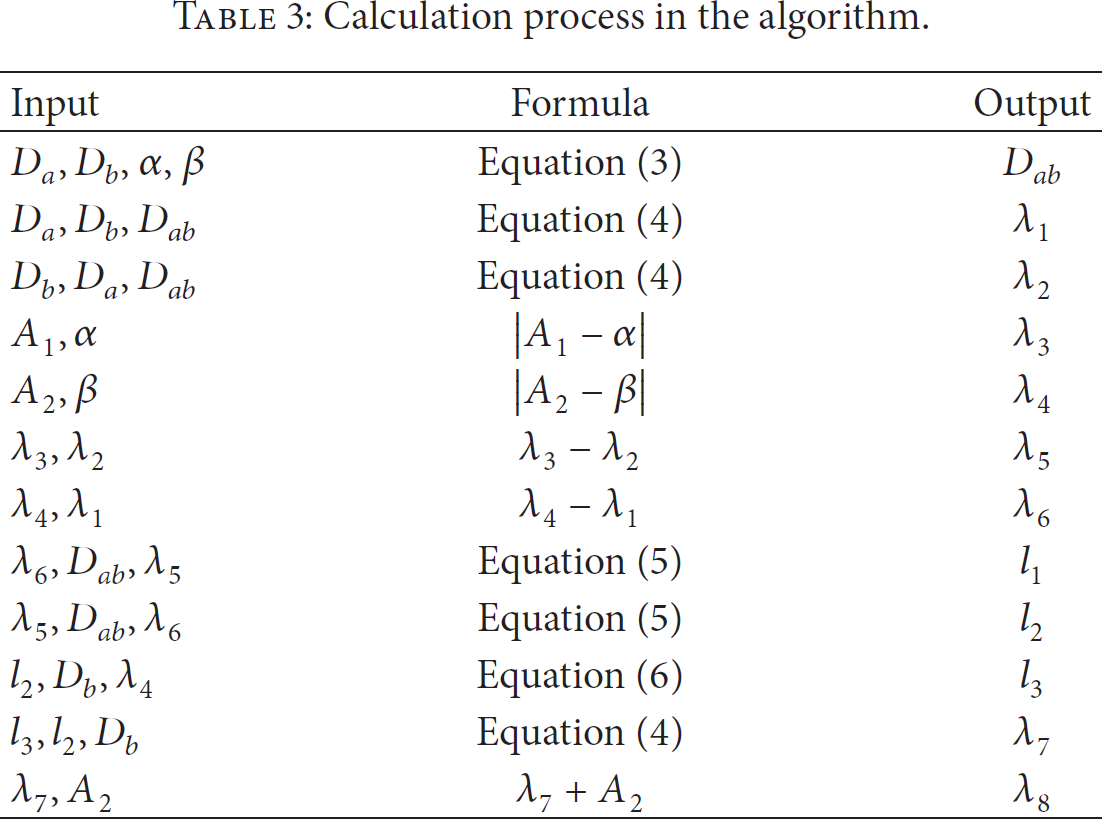
Broadcast Active Packet; When receive a packet → measure its arrive angel A and receive power If packet.ACT reject; If packet.CON get D = formula_2( add (D, A) to neighbor-list; send a Confirm Packet [CON, 0, D, A, Set a flag F = [null, null, null, null]; When receive a packet → measure its arrive angel A and receive power If packet.ACT If my.Level == null If packet.Level == 0 get D = formula_2( send a Confirm Packet [CON, 1, D, A, Else If F = null; F = packet.ACT; get rotate coordinate system the degree of θ clockwisely; Wait for another Active packet; Else get get The calculation process as shown in Table 3; add ( set my.Dis = send a Confirm Packet [CON, my.Level, send a Confirm Packet [CON, my.Level, If my.Level ≠ null If packet.Level > my.Level reject; Else get If this ( do nothing; Else add ( send a Confirm Packet [CON, my.Level, If packet.CON If packet.Level == 0 get θ = add ( set my.Level = 1; store my.Dis = begin to broadcast Active Packet [ACT, 1, Else get D = packet.Dis; If this (D, A) exists in neighbor-list do nothing; Else add (D, A) to neighbor-list;
Algorithm 1
Calculation process in the algorithm.

The flow chart of the algorithm.

The message flow diagram.
As shown in Figure 3, active packets are broadcasted by the sink node periodically, and the packet structure is shown in




Neighbor discovery of sink node.

Outer layer node unified the direction of coordinate system.
After being activated, the sensor nodes with the same situation as node A begin to send active packets, and the packet structure is shown in



Neighbor discovery between nodes.


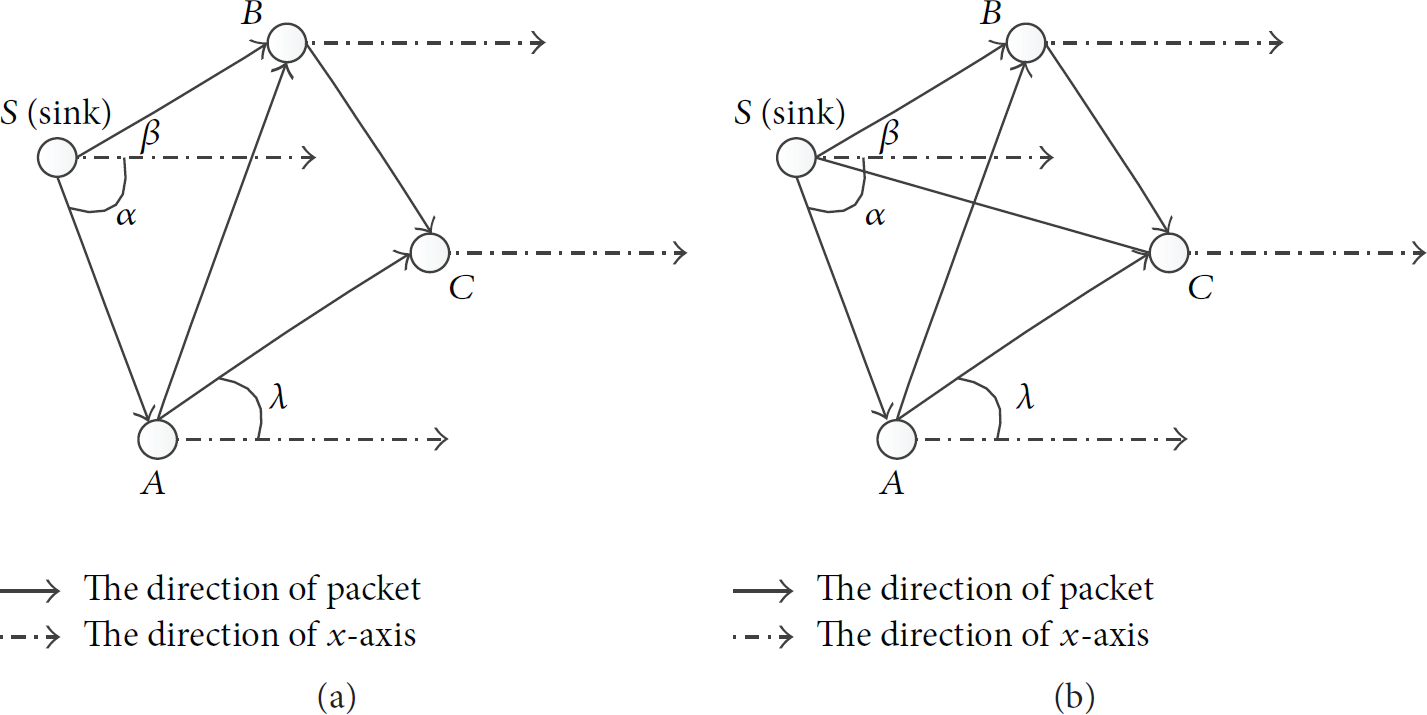
Angle and distance calculation of outer layer nodes.
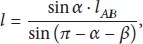
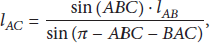
In Figure 6(a), node C can calculate the distance between A and B according to (13), since the active packets from A and B contain angles and distances of A and B to the sink, respectively. O is the direction of x-axis; then 



After calculating 



4. Theoretical Analysis of the Algorithm
In order to be localized uniquely based on the known information, what attributes of vertex and edge should the nodes in WSN satisfy? This is the key issue of localization research in WSN. Existing researches use methods including rigidity and global rigidity in frameworks [31, 32], geometric constraint [19], combinatorial rigidity in frameworks [33], and coordination of formations of autonomous agents [34] to prove the unique localization problem. Based on the research of [35], considering the characteristics of transmission and structure in WSN, we analyze the unique localization of the proposed network structure on the basic of global rigid framework.
Theorem 1 (see [36]).
Let N be a WSN in
Hence, the WSNs unique localization problem is switched into verifying the global rigidity of corresponding framework and analyzing the localizability.
First, we provide a mathematical description to WSNs localization problem. Let sensor nodes be distributed in D (
The network structure of the algorithm's output is shown in Figure 7. The forms store the neighbor's information of each node.

Part of an output of the algorithm.
Definition 2 (framework [17, 37]).
Let
According to Definition 2, each graph can be mapped into a framework, in which the set of edges is represented by
The rigidity of the framework will be enhanced under combined constraints. If all of the edges in the framework satisfy combined constraints, we call the framework full combined constraints.
In our algorithm, the combined constraint edge can be regarded as communication channel between the nodes. The communication data contains distance and angle information; that is, the distance and angle between two nodes are known by both sides via measurement and calculation, as shown in Figure 7. And hence, all of the edges in the framework can be seen both as the length edge and the bearing edge; that is,

WSNs structure of this algorithm which satisfies the combined constraint framework.
5. Simulation
An energy efficient anchor-free localization algorithm for no ID WSN model is proposed in this paper. In this section, a series of experiments are designed to verify the performance of the proposed algorithm. Furthermore, the positioning accuracy, localization rate, and energy efficiency of our algorithm have been analyzed thoroughly.
5.1. Performance Evaluation Criteria
The accuracy of positioning is described as follows: the wireless channel of WSN has the characteristics of being complex and changeful. There usually exist path loss, multichannel interference, shadow effect, and so on, which may result in distortion. Generally, the radio propagation model is not ideal, which produces measurement error inevitably, and this results in further positioning error between the calculated value and the actual node location. In addition, it is inevitable that distributed computing results in cumulative effect in multihops network. With multiple use of the calculation, the scope of the position error will be enlarged. In our experiments, the error follows normal distribution 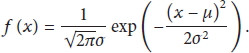
Localization Rate. In this paper, the concept of coverage rate of positioned node is used to judge the rate, and its computation formula is shown in (26), where sum
A
is the number of positioned nodes and sum is the total number of all nodes:

Energy Efficiency. Energy efficiency of the algorithm means that, after positioning energy consumption of the nodes in network as low as possible, energy consumption is uniformly distributed, and obvious excessive energy consumption of the node does not exist. Since the positioning calculation requires a lot of communication between nodes, which consumes huge node energy, hence, how to reduce energy consumption mentioned above and allocate more energy for routing and information transmission is the key issue to improve the network performance. One of the standards to measure the energy efficiency of the algorithm is the average residual energy of the nodes in the entire network, as shown in (27). And it reflects the overall energy saving effect of the algorithm. Another standard is the energy difference between the maximum node and the minimum node, as shown in (28), which reflects the balance of node energy consumption in the algorithm. Consider


5.2. Results
The proposed algorithm is simulated in MATLAB. Hardware and environment parameter settings involved in the experiments are shown in Table 4. The simulated network environment generated in our experiments is shown in Figure 9, and the neighbor link and range of each node are shown in Figure 10.
The main parameters of the experiment.


The experiment generated network simulation environment.
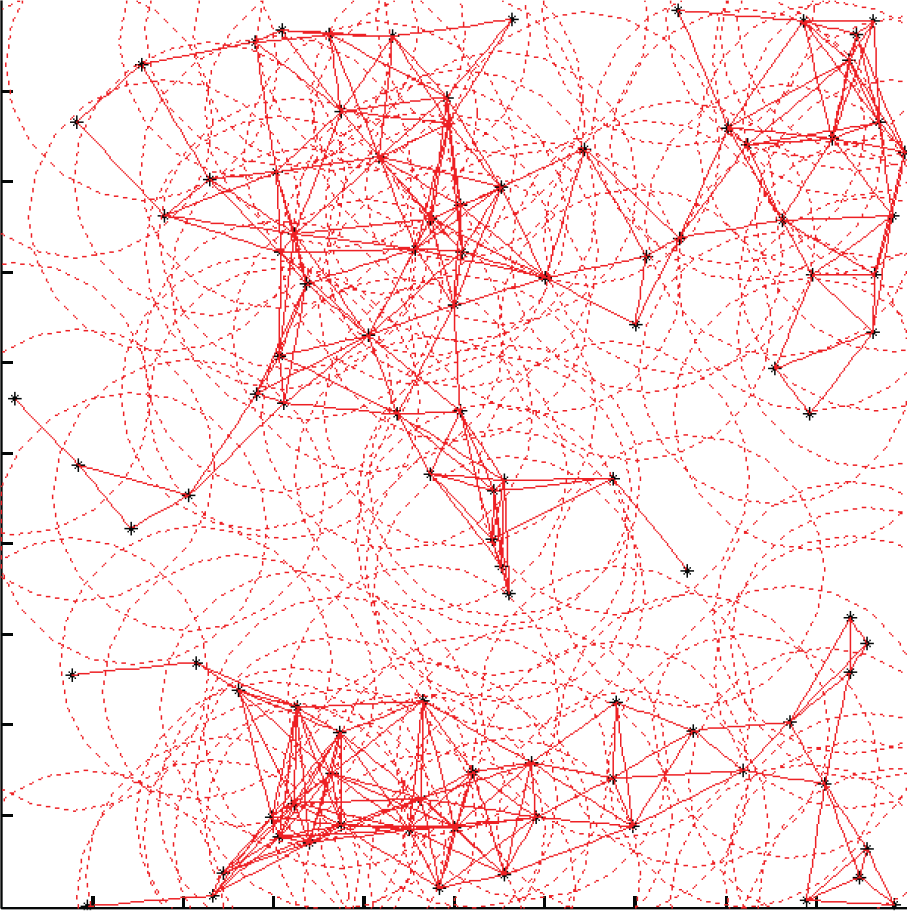
Neighbor link and range of each node.
Transmission threshold, sending, and receiving information parameters (i.e.,
100 nodes are deployed in the sensing area, and let each node be the sink node; the relationship of localization rate and distance from the center of the area to sink node is shown in Figure 11.

The relations of distance from the center of the region to each sink node and the localization rate.
In the deployed 100 nodes, the one with the highest localization rate is chosen as the sink node. The relationship between measure error and average error is shown in Figure 12.

The relations of the measurement error and average error.
In order to verify the energy efficiency, SPA [16], SDGPSN [19], and AAFL [20] are chosen to compare with the proposed algorithm. SPA is a classic anchor-based localization algorithm. SDGPSN adds clustering scheme on the basic of SPA and has similar structure with the proposed algorithm. AAFL is an anchor-free localization algorithm which is similar as the proposed algorithm, and it has good flexibility.
We deploy 250 nodes in the network. With the increasing of the nodes coverage rate, the change of the node average residual energy of all these four algorithms is shown in Figure 13. Figure 14 shows the node residual energy changing of these four algorithms with the increase of the node coverage rate. Obviously, the balance of SDGPSN's node energy consumption is the worst, followed by SPA and AAFL. The node energy consumption of the proposed algorithm is very balanced, and the difference of node's residual energy is no more than 30% even the coverage rate reaches 99%.
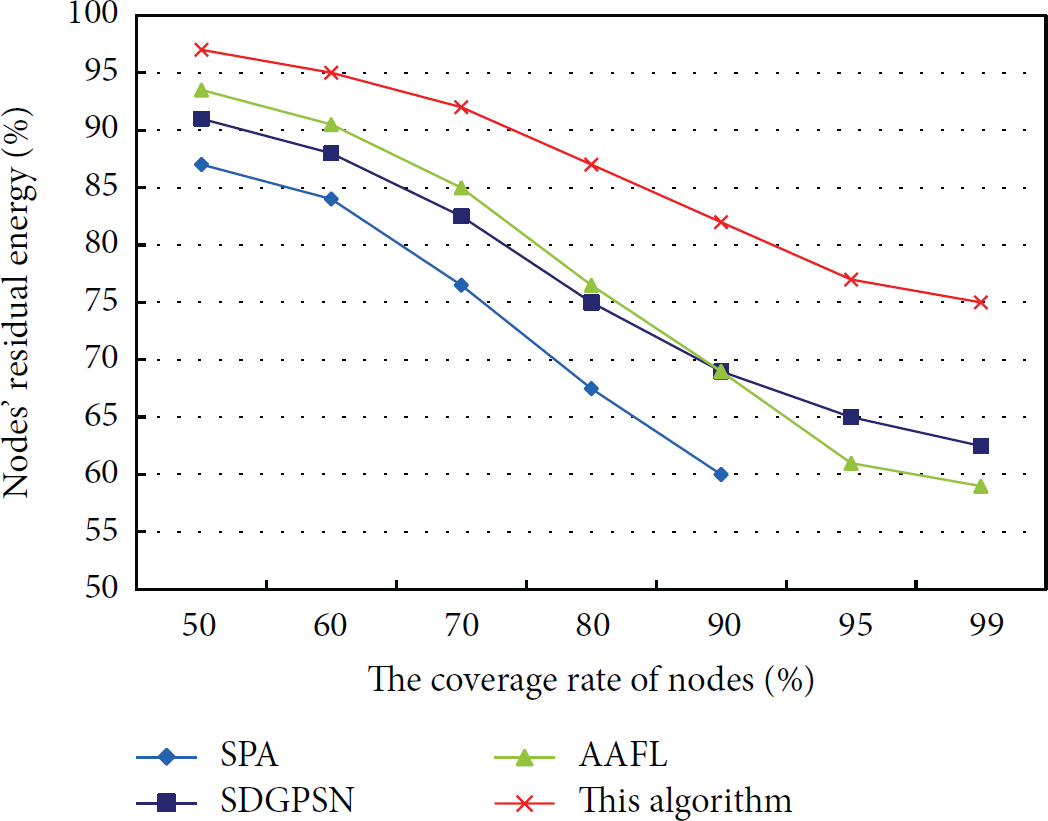
The relations of average residual energy and the coverage rate of nodes.
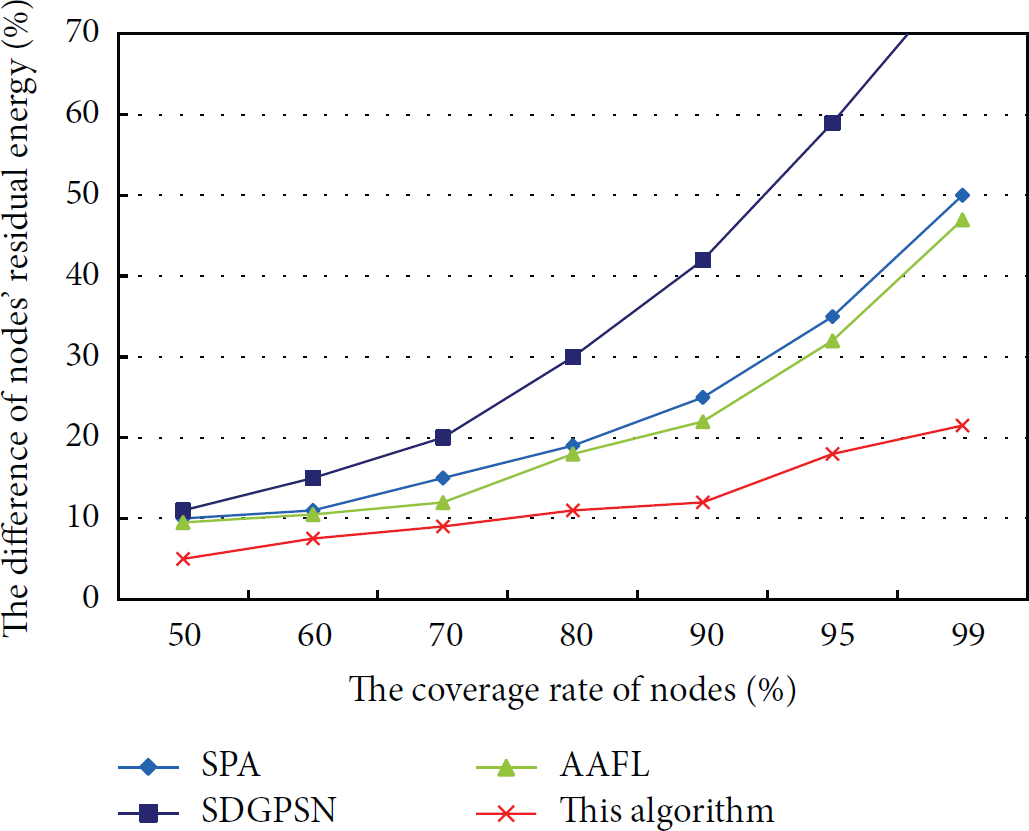
The relations of residual enenrgy and the coverage rate of nodes.
5.3. Experimental Analysis
In the positioning accuracy and localization rate aspects, the proposed algorithm is based on the research of global rigid framework system, which has the unique localization theoretical basis. Except the one-hop neighbor node of the sink, the location information of the rest of the nodes is all obtained by strict mathematical calculation, so that the measurement error of transmission expansion is avoided. Experiments show that the location of the sink node affects the localization rate to a certain extent. This is because the localization starts from the sink node and the positioning information is transmitted from the sink layer by layer. The localization rate will be higher if the sink node comes closer to the center of the sensing area.
In the energy efficiency aspect, it can be seen, no matter how much the coverage rate of positioned node is, the proposed algorithm has the most average residual energy of nodes. Additionally, with the increase of the coverage rate, this advantage is more and more obvious, which means good energy efficiency. Compared with the existing algorithms, instead of omnidirectional broadcast mode, the proposed algorithm adopts the method of sensor node searching for neighbor node based on directed diffusion function. And all data packets are sent by small fixed energy, rather than large energy, which narrows the search range and reduces the neighbor number of each node, and hence, energy will be saved. Furthermore, distributed discovery strategy is adopted in the proposed algorithm. Instead of directly communicating with sink node, the sensor nodes transmit the positioning information layer by layer from inside to outside. The information communication and positioning burden are similar for all nodes, which ensures the balance of the entire network node energy consumption.
5.4. Error Analysis
In the proposed algorithm, we assume that each node can measure the angle to other nodes and the power of radio waves; accordingly, accurate localization can be realized theoretically. In the simulation, we only consider the error caused by channel distortion, such as path loss, multichannel interference, and shadow effect.
In practice applications, a set of directional antennas is usually used for measuring the direction of radio wave, but the accuracy of the measured angles cannot be guaranteed.
In the proposed algorithm, however, only the first layer nodes (i.e., the one-hop nodes of sink node) are activated by the measured angle; the outer layer nodes obtain angles mainly by calculation. As a result, the error of a layer will not affect the next layer, so that the error will not accumulate layer by layer, and the accuracy of our algorithm mainly depends on hardware measurement.
6. Conclusions
In this paper, we propose an efficient anchor-free localization algorithm for wireless sensor networks (WSNs) without ID information. Making use of the positioning information transmitted by the sink node, the proposed algorithm can localize the nodes accurately without depending on the anchor node. We propose a network model that does not contain ID information, which makes the algorithm more flexible in application. The unique localization has been proved by the combined constraints based on global rigid framework. In the process of localization, the algorithm reduces radio transmission with high energy consumption. Localization of the node can be calculated mainly by mathematical calculation, and hence, the error accumulation has been reduced. Finally, the localization efficiency and accuracy have been verified by reasonable experimental design, and the algorithm has been proved with high energy efficiency on the premise of accurate positioning. In practical applications, three-dimensional localization method and theory are more close to the actual WSNs sensor node deployment. Therefore, our future research will focus on WSNs localization in three-dimensional space.
Footnotes
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.