
Abstract
Wireless signal can be easily influenced by the environment in the propagation process. The signal propagation model is the most appropriate model for current indoor environment to ensure the ranging accuracy based on received signal strength indicator (RSSI). In this paper, we propose a robust localization algorithm based on the RSSI ranging scope by which the RSSI ranging error caused by using a fixed parameter in signal propagation model is dramatically eliminated. Our contributions in this paper are twofold. First, the influence of RSSI ranging error on positioning accuracy is well discussed in detail in the scope of the wireless signal propagation model. Second, we develop a robust localization algorithm which creates a one-to-one mapping between the RSSI value and the distance scope based on the value scope of path loss exponent in the signal propagation model. Simulation results indicate that the proposed localization algorithm based on the RSSI ranging scope is robust under different environments, when the real path loss exponent is difficult to measure accurately.
1. Introduction
Wireless sensor networks (WSNs) are one fundamental component of the Internet of Things (IOT). The localization capability of WSNs has attracted more and more attention, because it can be applied for localization and tracking of targets in the IOT [1]. In the literature, localization approaches for WSNs can be roughly divided into two categories: range-based and range-free [2]. Range-based localization approaches utilize time of arrival (TOA), time difference of arrival (TDOA), angle of arrival (AOA), and received signal strength indicator (RSSI) to measure the distance between two nodes [3, 4]. Range-free localization approaches only utilize connectivity and proximity to estimate the region where a node stays [5–8]. Therefore, compared with range-free localization approaches, range-based localization approaches are more accurate at the expense of more source consumption.
Because all of commercial wireless chips are capable of computing received signal strength, RSSI based localization algorithms have been widely used [9–13]. Firstly, RSSI based localization algorithms take advantage of the less signal propagation loss model to measure the distances from a node to the beacons. Then, the trilateral algorithm, the least square algorithm, or the maximum likelihood estimation algorithm could be applied to calculate the coordinates of the unknown nodes. It is obvious that the accuracy of a RSSI based localization algorithm is decided by the wireless signal propagation loss model. In most of the previous works, the parameters of the model are calculated by measuring the RSSI values between the beacons [14–16]. Since wireless signal can be easily influenced by the environment in propagation process, signal propagation characteristics will be different at the same time in different regions or at different instants of time in the same region. It is hard to measure the parameters of wireless signal propagation loss model accurately [17–19]. Therefore, it is inaccurate that all nodes in the localization area use fixed and same parameters of wireless signal propagation loss model to measure the distances. There are other related works: [3, 4] utilize range-based localization with ranging errors; [5–7] use a sensor array to detect locations of intrusion objects.
In this paper, we firstly analyze the influence of the RSSI ranging error on positioning accuracy in great depth. Then, we propose a robust localization algorithm based on the RSSI ranging scope. In order to eliminate the error caused by using the fixed and same parameter of the signal propagation model, our proposed algorithm creates a one-to-one mapping between the RSSI value and the distance scope based on the value scope of the parameter in the signal propagation model. Moreover, we conduct extensive simulations to evaluate the proposed algorithm. Based on the evaluation results, the proposed algorithm is greatly adaptable to a dynamic environment.
The remainder of this paper is organized as follows. Section 2 discusses the influence of the RSSI ranging error on positioning accuracy. Then, the robust localization algorithm is proposed in Section 3. Simulation results are provided in Section 4, and Section 5 concludes the paper.
2. Analysis of RSSI Based Ranging
In a RSSI based ranging algorithm, a node applies RSSI measurements to estimate its distances from the beacons, by using a known signal propagation model. Since signal attenuation is often related to the specific environment, the signal propagation model, the most appropriate model for the current environment, is essential to ensure the ranging accuracy. Currently, the shadowing model is widely used to model wireless signal propagation loss [20], which is expressed as


Path loss index n under different environments.
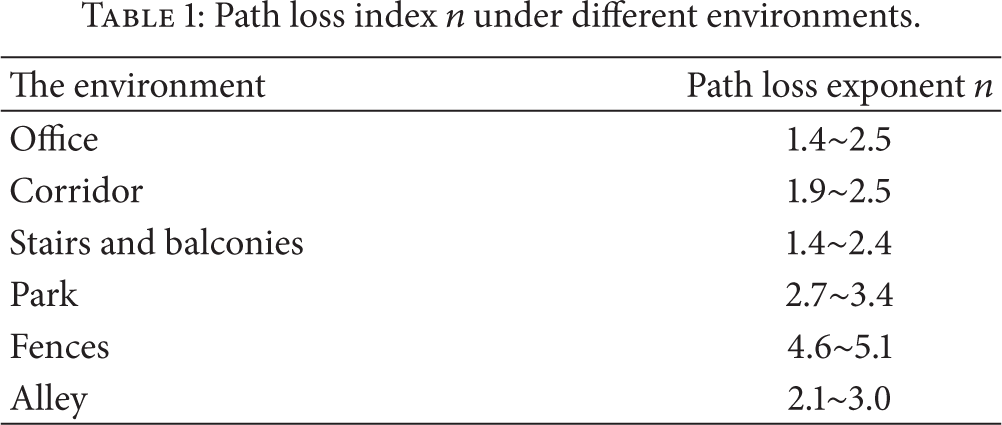
If A and n are accurate in the current indoor environment, then the RSSI based ranging is perfect. In most of the RSSI based ranging algorithms, the parameters of the signal propagation model are calculated by a set of online or offline RSSI measurements between the beacons. Of course, online RSSI measurements consume computation and communication. However, this is not the case in a practical environment where the signal propagation model is extremely difficult to estimate [22]. The parameters of the estimated model may not accurately reflect the real radio channel of an indoor environment at any particular time and space.
3. Robust Localization Based on the RSSI Ranging Scope
3.1. The Influence of RSSI Ranging Error on Positioning Accuracy
In the localization area, assume that the known coordinate of the ith beacon
Assume that there are three beacons 


Wireless signal propagation process can be easily influenced by building materials and types, including even people in real indoor environment. Since signal propagation characteristics will be different at the same time in different regions or at different instants of time in the same region, it is hard to accurately estimate the parameters of the wireless signal propagation loss model. The RSSI measurement is disturbed by channel noise, obstacles, and other shadowing effects. As a result, the distance estimation is inaccurate by using same and fixed parameters of the wireless signal propagation loss model. Therefore, instead of utilizing the real distances 



where
For each beacon

Region division based on the RSSI value when

Region division based on the RSSI value when
3.2. The Localization Algorithm Based on the RSSI Ranging Scope
As mentioned earlier, due to the inaccuracy of the path loss exponent, distances based on the RSSI ranging may have errors. Therefore, the estimated coordinate obtained by the trilateral algorithm will not be accurate. To get higher positioning accuracy, we need to adopt the signal propagation loss model which is more appropriate for the current indoor environment. The signal propagation is easily influenced by environmental factors; hence it is extremely difficult to develop a graph between the RSSI value and the distance. Since the value of n is varied within a certain range depending on the characteristics of the environment, a localization algorithm based on the RSSI ranging scope is proposed. When it is hard to measure the path loss exponent n accurately, a value scope of n is measured instead of using a fixed value. If a fixed value or a value scope of n is given, a one-to-one mapping between the RSSI value and the distance can be created.
Assume that the value scope of the real path loss exponent 
Being different from the localization algorithm based on the RSSI ranging value,

Region division based on the RSSI ranging scope.
In RSSI based ranging algorithms, the parameters of the signal propagation model should be calculated at first. Considering that it is hard to measure the path loss exponent n accurately, a value scope of n is measured instead of a fixed value in the proposed algorithm. It is more simple to obtain a value scope
Both localization algorithms based on the RSSI ranging value and based on the RSSI ranging scope need to calculate the estimated coordinate 
4. Performance Evaluation
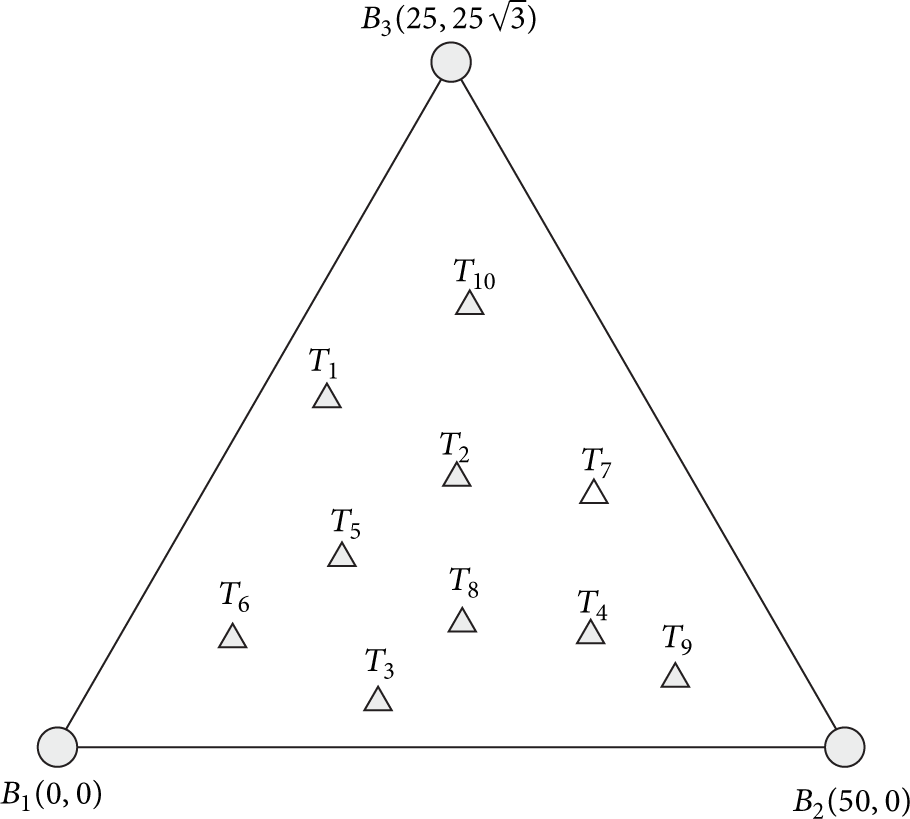
This section presents performance evaluation of localization algorithms based on the RSSI ranging value and based on the RSSI ranging scope. The experimental environment is depicted as in Figure 4. The localization area is defined as an equilateral triangle and each side is 50 m. Three beacons are deployed at three peaks of the equilateral triangle. There are
Simulation scenario.
The following equation is used to evaluate the performance of two localization algorithms:

4.1. Analysis of Localization Errors Caused by n
Table 2 shows the average localization errors of two localization algorithms obtained by conducting simulations 50 times while the value scope
Comparison of average localization errors under different environments.

Next, we evaluate the relationship between the average localization errors and the uncertainty of
Influence of average localization errors by uncertainty of

Above simulation results show that the localization algorithm based on the RSSI ranging scope is more accurate and robust, when real path loss exponent is uncertain in a dynamic environment.
4.2. Analysis of Localization Errors Caused by A
Table 4 shows the average localization errors of two localization algorithms obtained by conducting simulations 50 times while A changes. We can observe that the average localization errors of both localization algorithms have not been changed much while A changes from −30 dB to −50 dB. As a result, we can see that localization errors are mainly caused by the path loss exponent n in RSSI based localization algorithms.
Influence of average localization errors by A.

4.3. Analysis of Localization Errors Caused by
The simplified shadowing model described by (2) is used in the above analysis. Now we evaluate the average localization errors caused by 

Tables 5, 6, and 7 show the average localization errors of two localization algorithms obtained by conducting simulations 50 times while σ is varied. We can observe that the average localization errors of two localization algorithms both increase while σ increases. Meanwhile, the average localization errors of two localization algorithms both decrease while N increases. The larger the N value is, the more the communication cost is.
Average localization errors when

Average localization errors when

Average localization errors when

5. Conclusion
In this paper, we mainly discuss the relationship between the parameters of the signal propagation model and RSSI ranging accuracy. Since it is difficult to measure the parameter, a robust localization algorithm based on the RSSI ranging scope is proposed. Instead of using the fixed parameter in the signal propagation model, the proposed algorithm created a one-to-one mapping between RSSI value and the distance scope based on the value scope of the path loss index. Simulation results demonstrate that the localization algorithm based on the RSSI ranging scope is more accurate and robust under different environments, when the signal propagation model, which is more appropriate for the current indoor environment, is extremely difficult to estimate.
Footnotes
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Acknowledgments
This work was supported in part by the Natural Science Foundation of China under Grant no. 61203218, the Natural Science Foundation of Jiangsu Province under Grant no. BK2011318, and the Natural Science Foundation of China under Grant no. 61373098.