
Abstract
The goal of the cooperative intelligent transport system (C-ITS) is to provide a vehicular communication system that can enable quick, cost-effective means to distribute data in order to ensure safety, traffic efficiency, driver comfort, and so forth. The vehicular communication for C-ITS is composed of vehicle-to-infrastructure (V2I) and vehicle-to-vehicle (V2V) communications. In V2I, signals from roadside units (RSUs) often have to propagate through large buildings in urban areas, which can cause signal loss due to shadowing effects. V2V can provide video streaming capabilities to enable enhanced C-ITS services, but communication among vehicles may suffer from network congestion. Therefore, we propose a hybrid transmission mechanism in this paper based on full-duplex relay vehicles for MIMO-capable C-ITS. We adopt the use of full-duplex relay vehicles to enhance the reliability of seamless video stream transmission in V2I. For congestion resolution in V2V communications, the MIMO transmission mode is adapted according to the traffic situation and an extra detour path is used to satisfy various QoS requirements of multipriority video data. Simulations are also carried out to show that our mechanism improves the network throughput of MIMO-capable C-ITS with video streaming capability.
1. Introduction
In recent years, the multiple input multiple output (MIMO) has become a popular technology for wireless communications. MIMO antennas provide two modes of operation: (a) simultaneous transmission of different data by using multiple antennas to increase the data rate, which is referred to as spatial multiplexing (MUX), and (b) simultaneous transmission of the same data by using multiple antennas to increase the reliability or the transmission range, which is referred to as spatial diversity (DIV) [1]. Namely, the DIV mode has the advantage of a wider coverage area or of overcoming a multifading environment while the MUX mode improves data throughput.
Millions of vehicle accidents occur worldwide each year, and one of the most critical issues in transportation is to relieve traffic jams [2]. A frequency band at 5.9 GHz has been allocated for the cooperative intelligent transport system (C-ITS), and the IEEE 802.11p short-range wireless standard has been selected as the communication technology to ensure priority for road safety applications as well as for vehicle to vehicle (V2V) and vehicle to infrastructure (V2I) communications [2, 3]. C-ITS can utilize different wireless technologies for different applications depending on the requirements and information dissemination area.
If the MIMO MUX mode is used to stream emergency video in V2V communications, network throughput and delay can be improved. However, it is also possible that a vehicle may be overwhelmed (congested) with video streams from its neighbors when using the MUX mode, a situation that is somewhat similar to the broadcast radiation/storm problem [4]. This congestion problem can be particularly severe in a multisource vehicular network environment where enhanced road traffic efficiency and safety have been enabled.
The MIMO MUX mode may also not be proper for a V2I communication environment that is unreliable. In order to send multiple different data streams by using the MIMO MUX mode, the channel between the roadside unit (RSU) and the vehicle needs to have several strong, independent propagation paths. However, most urban vehicular ad hoc networks (VANETs) often have only a single strong path between the RSU and the vehicle as a result of the geometry of the streets, buildings, and trees that provide a radio frequency (RF) pinhole [5, 6], as shown in Figure 1(a). Even with the MIMO DIV mode, we often experience a perplexingly poor wireless performance due to fundamental conditions, such as propagation loss [1]. In C-ITS, propagation loss is more severe and is expected to be the cause of a deterioration in the link rate due to mobility and obstacles.

Deployment and scenario of RSUs and vehicles.
Figure 1(a) shows a scenario where RSUs and vehicles are deployed in real city streets. C-ITS aims to develop a vehicular communication system that can enable a quick and cost-effective distribution of data to ensure safety, traffic efficiency, and driver comfort by supporting a range of automotive applications. Figure 1(b) shows a typical city street where a Wi-Fi RSU disseminates news of an accident as widely as possible. For example, the RSU informs the vehicle D near the accident area of the accident. As a result, D goes straight instead of turning right to avoid the accident area.
In this paper, we propose a full-duplex relay-based hybrid transmission mechanism for MIMO-capable C-ITS. The end-to-end (global) path from the RSU to the destination vehicle is constructed by using the dynamic source routing (DSR) protocol [7, 8] while the local link between the RSU and its 1-hop neighbor vehicle can be extended to a multihop path with a full-duplex relay vehicle. In order to overcome the conditions of an unreliable V2I environment, the communication between the RSU and its 1-hop neighbor vehicle can be performed in the DIV mode. The V2V links on the global path opportunistically use either the MUX or the DIV mode depending on the traffic situation. In addition, our mechanism utilizes an extra detour path to mitigate the congestion by dispersing traffic and by providing support for different QoS requirements of multipriority packets by dedicating different paths to different priorities. To the best of our knowledge, this is the first work that proposes using an opportunistic on-demand detour-path routing mechanism with full-duplex relays while also considering the different QoS requirements of video data in MIMO-capable C-ITS.
The rest of the paper is organized as follows. The previously proposed MIMO-aware routing and full-duplex relay mechanisms are briefly covered in Section 2, and a detailed description of the proposed scheme is given in Section 3. Section 4 presents the results of the simulation, and finally we conclude the paper in Section 5.
2. Related Work
2.1. The Multipath Routing Scheme
Extensive studies have been carried out to investigate multipath routing for wireless mobile ad hoc networks. The multipath scheme has been found to improve network reliability in the case of link disconnection of an active route. The multipath routing approach is much more robust than the single path approach and also requires a lower cost to discover an alternate route. The ad hoc on-demand multipath distance vector (AOMDV) [9] is an extension of the ad hoc on-demand distance vector (AODV) [10] and was proposed to compute multiple loop-free and link-disjoint paths. Lee and Gerla [11] proposed a split multipath routing (SMR) protocol based on DSR to find an alternate route that is maximally disjoint from the shortest delay route. In [12], the SMR scheme is improved by adopting the bloom filter concept to store information related to the detour path over the unreliable wireless links. In [13], the authors propose an on-demand multiple path routing protocol that is based on DSR for mobility. In [14], the authors propose an on-demand multipath routing protocol for multihop wireless networks that can find spatially disjoint paths without using the location information. Reference [15] shows that finding multiple uncorrelated node-disjoint paths between a given pair of nodes in an ad hoc network is the same as finding a chord-less cycle in a graph that contains source and destination nodes.
However, the previous multipath routing protocols incur message and/or storage overhead proportional to the number of nodes and the number of transmission failures, and, in addition, timely throughput for seamless video streaming and the congestion problem are not addressed.
2.2. MIMO-Based Routing Scheme
Recently, MIMO-based routing protocols have been proposed to maximize performance gains for wireless networks. These protocols can be categorized into either multipath or single-path routing protocols.
Sundaresan and Sivakumar presented a representative MIMO routing protocol, MIR [16], based on DSR. In MIR, when nodes are close to each other, the MUX mode is used and the DIV mode is used only for disconnected links. Therefore, the MIR scheme may result in congestion at specific nodes since nodes tend to utilize the MUX mode as much as possible. Chen et al. proposed a bow-based multipath routing protocol, BBS [17], to enhance the MIR protocol by continuously checking the link states of the MIMO ad hoc network. However, this protocol requires additional overhead for periodic beacon messages in order to maintain and use multiple paths and can only operate in a time division multiple access (TDMA) system. A routing algorithm with QoS provisioning is presented in [18] in order to exploit the multiplexing gain and the interference cancelation property of the MIMO antennas.
However, the above-mentioned MIMO-based routing mechanisms do not consider the QoS requirements of video streams.
2.3. Fast and Constructive Full-Duplex Relays
Bharadia and Katti proposed the FastForward (FF), a novel full-duplex relay, to constructively forward signals such that the wireless network throughput and coverage can be significantly improved [19]. FF is a layer 1 in-band full-duplex device and receives/transmits signals directly and simultaneously on the same frequency. It cleanly integrates into existing networks (both Wi-Fi and LTE) as a separate device and does not require any changes to the clients. FF's key invention is a constructive filtering algorithm that transforms the signal at the relay such that when it reaches the destination, it constructively combines with direct signals from the source and provides a significant throughput gain. They also presented a prototype FF using off-the-shelf software radios running stock Wi-Fi physical (PHY) technology.
The authors of [20] presented a design and implementation of the first in-band full-duplex Wi-Fi radios that can simultaneously transmit and receive signals on the same channel using the standard Wi-Fi 802.11ac PHYs and achieve close to the theoretical doubling of the throughput in all practical deployment scenarios. They also proposed novel analog and digital cancellation techniques that cancel the self-interference to the receiver noise floor and, therefore, ensure that there is no degradation of the received signal. They presented a prototype of their design by building their own analog circuit boards and integrating them with Wi-Fi-PHY a fully compatible software radio implementation.
However, these schemes do not take into account the mobility of VANET and assume the perfect channel state information (CSI) between the AP and the original client without using a relay node.
3. Hybrid MIMO-Aware Transmission Mechanism
In this section, we define the full-duplex relay vehicle-based hybrid transmission mechanism. The end-to-end path from the RSU to a destination vehicle is constructed by using DSR, as shown in Figure 2(a), while the local link between the RSU and its 1-hop neighbor vehicle is extended to a multihop path via a full-duplex relay vehicle, as shown in Figure 2(b).

Scenario for the proposed full-duplex relay vehicle based hybrid transmission mechanism.
In a V2V environment, traffic jams and accidents can unexpectedly occur, and to disseminate video streams related to traffic safety and efficiency as widely as possible within limited meaningful time, the packet priority depending on the video data type should be considered. To this end, we adopt the concept of a detour path to guarantee the video streaming performance in a V2V network. In addition, since a V2V environment does not have as many obstacles or buildings as a V2I environment, we focus only on resolving congestion caused by video streams among vehicles. Hence, in V2V, the objective of using the DIV mode is to avoid congestion by extending the transmission range. On the other hand, the use of the DIV mode in V2I is to cope with unreliability of local links between the RSU and its 1-hop vehicles. Therefore, we propose using the DSR routing protocol to establish an end-to-end path and to use a detour path to resolve data traffic congestion at a vehicle.
3.1. Full-Duplex Relay Vehicle in V2I
The continuous evolution of wireless standards provides very high link bit rates at up to 300 Mbps for LTE and up to 1.3 Gbps for 802.11ac Wi-Fi with two main factors: the use of higher modulation (up to 256QAM) and higher MIMO spatial multiplexing (up to 4 parallel streams). Both of these features should work well when there is little to no contention/interference and a single or a few users are connected to the Wi-Fi AP or the LTE base station. However, Bharadia and Katti [19] have shown that users experience raw speeds that are one to two orders of magnitude lower than the advertised speeds.
In VANET, the signals from the RSU often have to propagate through large buildings in urban areas that further cause signal loss due to shadowing effects, as shown in Figure 1(b). Specifically, as Figure 1(b) shows, vehicle A in the middle of the street may experience the signal-to-noise ratio (SNR) of 8–13 dB and vehicle B at the edge of the coverage area of the RSU of 0–4 dB, with the exception of the local links of 1-hop neighbors in the Wi-Fi zone around the RSU.
In order to resolve this problem, we utilize a fast and constructive full-duplex relay in V2I. In contrast to the prior work presented in [20], the relay vehicle does not need to know the CSIs between the other vehicles and the RSU, and the RSU can send emergency video information with the MIMO DIV mode to the next vehicle that is chosen with the DSR routing protocol and can also make the full-duplex relay vehicle perform filtering and amplification operations on the DIV mode signal.
The full-duplex relay is a single device that operates by independently listening to the signal from the source, digitizing it to IQ samples, processing it by passing the IQ stream through a filter (in both digital and RF domains), and up-converting and amplifying the processed IQ stream to the RF signals that are then transmitted to the destination on the same frequency. The filtering and amplification are performed in such a way that the SNR of the signal at the destination significantly increases, and the number of the independent MIMO paths at the destination also increases, enabling a significantly higher bit rate.
In the proposed scheme, the RSU can select a proper full-duplex relay by periodically measuring the local links. As a result, the SNR of the signal at the next hop vehicle significantly increases while the number of independent MIMO paths at the next hop vehicle also increases, enabling a significantly higher bit rate. Thus, the full-duplex relay acts as a controlled strong multipath creator of the signals that is completely transparent to the next hop vehicle. That is, the next hop vehicle does not even realize that the full-duplex relay vehicle exists.
When the RSU informs the destination vehicle D of an accident, as shown in Figure 1(b), first it sends the video stream to the next vehicle B with the help of the full-duplex relay vehicle A. In general, wireless links between the RSU and its 1-hop neighbor vehicles are unreliable. Therefore, we only consider the DIV mode for V2I in order to strengthen the signal with receiver selection combining and maximal ratio combining, as shown in Figure 3.

DIV transmission in V2I using a full-duplex relay vehicle.
3.2. Transmission Policies in V2V
We define three transmission policies for the V2V communications.
A Shortest Path with MUX. This policy adopts a shortest path using MUX. The shortest path is defined as the minimum latency path constructed by the DSR routing protocol. In this case, the MIMO MUX mode is used to increase the data rate. A Detour Path with MUX. This policy adopts a detour path using MUX. The detour path is the shortest among the paths that do not overlap with the shortest path the most. This policy resolves congestion and has a higher priority than the policy P3. A Shortest Path with DIV. This policy adopts a shortest path using DIV. The purpose of using the DIV mode in this policy is different from that in unreliable V2I communication. In this case, the DIV mode is used to increase the transmission range in order to resolve the congestion problem in V2V. When congestion happens, this policy makes the congested vehicle bypassed by packets, resulting in less traffic at the congested vehicle. This policy requires more processing than P2, so P2 is preferable than P3 to resolve congestion.
3.3. Congestion Detection and Resolution
We introduce two types of queue thresholds for the opportunistic transmission mechanism. The current vehicle queue size is measured against the queue thresholds, and the current vehicle queue size θ is defined as follows:

Two types of queue thresholds,
The threshold

The ratio of data loss caused by congestion.
Figure 5 presents the operation of the proposed mechanism for V2V with two source and destination vehicle pairs (S1, D1) and (S2, D2). Initially, each vehicle uses MUX to send a video stream in order to improve the overall network throughput and periodically checks its own queue size. When the queue of the vehicle D temporarily exceeds THm-d, it assumes that it is experiencing congestion. Then, D finds its previous-hop vehicle B that has sent packets the most by checking the DSR header and sends an mRERR message to B to request to use the P2 or P3 transmission policy. And B tries to find a detour path that is most different from the former, so B finds the path B-C-D1 and sends low priority packets, such as B- and P-frames, by using this path, and sends high priority packets, such as I-frames, along the former path.
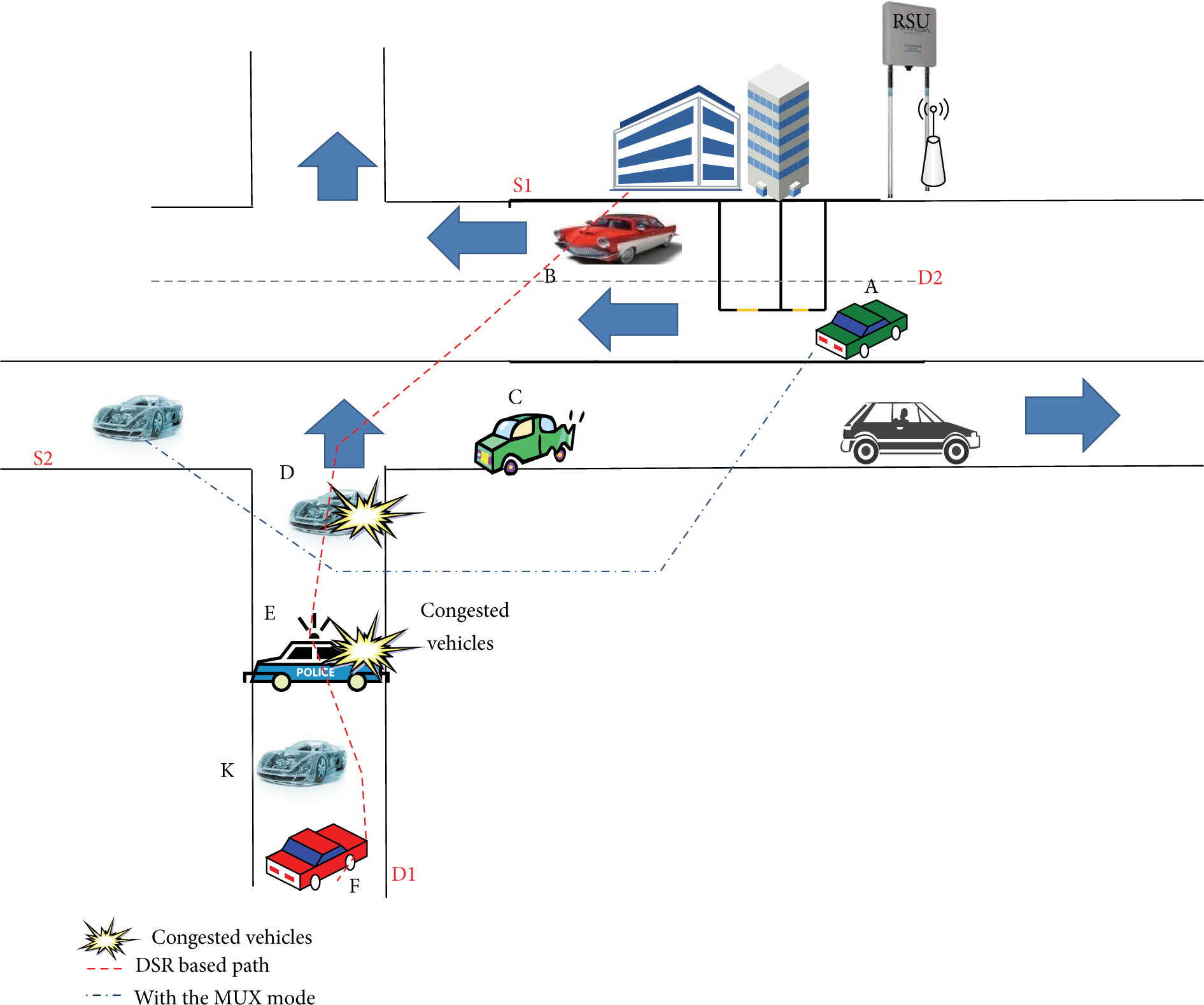
Scenario of congested vehicles in V2V.
Now, let us assume that E also becomes congested. If D cannot find a detour path to the destination after receiving the mRERR message from E, D changes its transmission policy to P3 (i.e., it sends packets by using DIV) and sends I-, B-, and P-frames by using the path D-K-D1. After the congestion has been resolved, the congested vehicle E sends an mRERR message again to the previous-hop vehicle to request for the transmission policy change from P3 to the original P1 in order to improve the overall throughput of the network.
3.4. Detour Path for the Congested Vehicle
As described in the previous subsection, once the mRERR message is received, the previous-hop vehicle changes its transmission policy from P1 to either P2 or P3, depending on the network conditions. At first, the previous-hop vehicle of the congested vehicle changes its transmission policy to P2. The previous-hop vehicle may use its predetermined detour path or may initiate a new route discovery. This detour path must be disjoint from the formerly used (or original) path, and if there exist more than one disjoint path, the shortest one is chosen. Only paths with hop counts that are not larger than that of the original path plus 3 can be candidates for the detour path (the reason to use the limit of 3 is given in Section 4). If the previous-hop vehicle cannot find the detour path, it changes its transmission policy to P3.
To the best of our knowledge, this is the first work that proposes an opportunistic on-demand detour-path routing mechanism with a full-duplex relay and, at the same time, addresses the different QoS requirements of video streaming in MIMO-capable C-ITS.
3.5. Video Streaming
Video streaming is a resource-intensive application, and, until now, research on video streaming has been mainly conducted for general wireless networks. The preliminary results of video streaming experiments between two vehicles reported in [21, 22] have shown that good visual quality can be achieved when the intervehicle distance is less than 300–400 meters.
We assume that video traffic is categorized into three types of video frames: I-frames, P-frames, and B-frames. I-frames are known to be the most important frames and do not need the others to be decoded. On the other hand, P- and B-frames refer to the previous and the following I-frames to be decoded. Hence, the dependency on I-frames is much higher than that on B- and P-frames, and thus it is vital to assign shorter paths to I-frames. When the network is congested, B- and P-frames are transferred over to a detour path because they are the second and third levels of importance to reconstruct a video stream.
4. Performance Evaluation
We evaluate the proposed scheme by integrating realistic microscopic mobility traces generated by using real-world road topology and real data-based traffic demand with realistic channel models. We also take into account the effect that vehicles have on the received signal power. To this end, we incorporate realistic large-scale mobility traces from the PeMS database [23] into the accurate microscopic mobility model provided by the simulation of urban mobility (SUMO) [24] based on vehicle mobility and communication channel models [25].
SUMO can determine its input and its parameters according to the vehicle flow and speed data that are extracted from the PeMS dataset. We use the QualNet simulator to carry out simulations with the input dataset in order to evaluate the performance of the proposed mechanism [26]. We have modified DSR such that each source uses the shortest alternate route as its detour path, and we refer to this scheme as the modified DSR (mDSR). Our mechanism is compared against mDSR and the MIMO policy-only scheme based on MIR.
The simulation parameters are shown in Table 1. The network size is set to 1,500 m × 1,500 m, and the simulation time is set to 300 seconds. 50 vehicles are randomly placed in the simulation area. The MPEG video encoding method is used and MPEG traffic is generated with the IBBPBBPBBPBB pattern.
Simulation parameters.
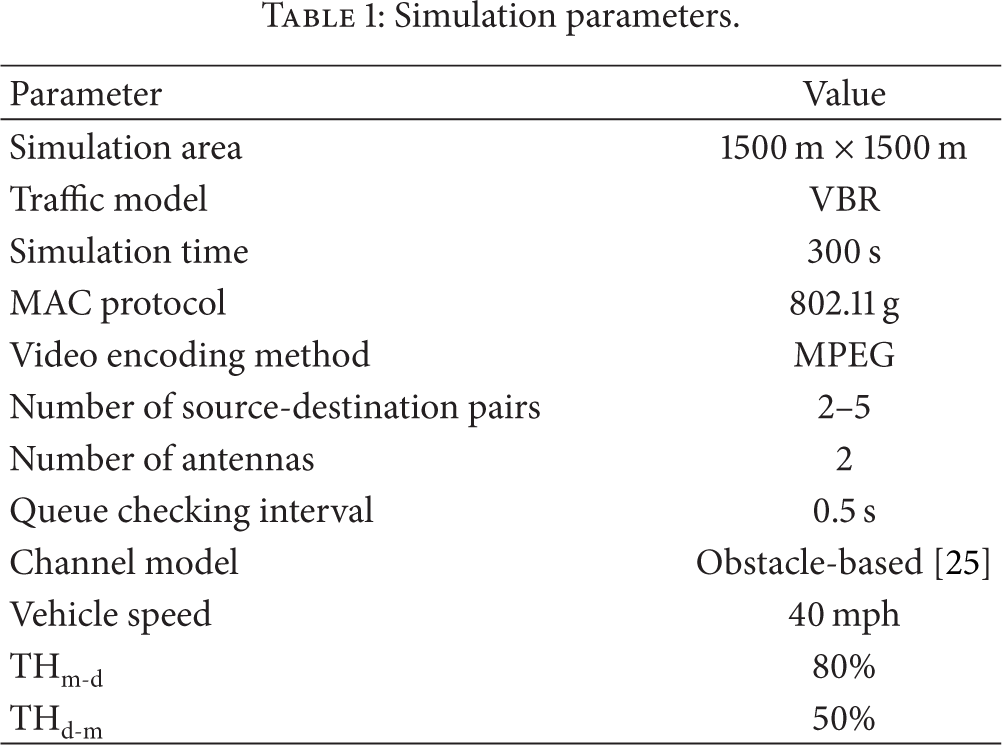
The range of the radio propagation and the channel capacity of the DIV mode are set to 750 m and 6 Mbps, respectively. The channel capacity of the MUX mode is of 9 Mbps, which is higher than DIV, and the radio propagation range is of 400 m. We adopted the IEEE 802.11g standard, and the mean transmission range of the vehicles is determined by adjusting the transmission power in the channel model. The VANET topology is obtained by using an accurate microscopic mobility model in SUMO while determining the input and parameters by using the PeMS database, as previously explained. The vehicle mobility output of SUMO is the input for QualNet, where the channel model is implemented, and the performance metrics are then derived and plotted. The pertinent datasets can be found in [25].
We specifically considered using a recently proposed and more realistic obstacle-based channel model that incorporates the effect of moving obstacles (i.e., vehicles) on the received signal power due to their dominating influence, as shown in [25]. The obstacle-based channel models incorporate the effect of the surrounding obstacles, such as other vehicles, walls, and buildings, on the received signal strength. These obstacles can reduce the probability that a line-of-sight (LOS) is achieved between the transmitter and receiver vehicles. The authors of [25] have analyzed the effects that the obstacle-based channel model has on the topology characteristics of VANET by comparing the node degree, neighbor distance distribution, link duration, number of clusters, and size of the largest cluster. They also introduced time correlation for the Gaussian random variable in the log-normal model by providing a good match with the obstacle-based channel model. Therefore, we evaluate our proposed scheme with a more realistic obstacle-based channel model for the topology characteristics of VANET.
Figures 6–9 provide the results of the simulation for V2V communications only. Figure 6 shows the delivery success rate for a random topology with 50 vehicles, and the delivery success rate is the ratio of the data that is successfully transferred to the total amount of data sent from sources to destinations during the given simulation time. This figure obviously shows that our proposed mechanism provides a higher delivery success rate than others due to the detour-path policy and MIMO mode selection.
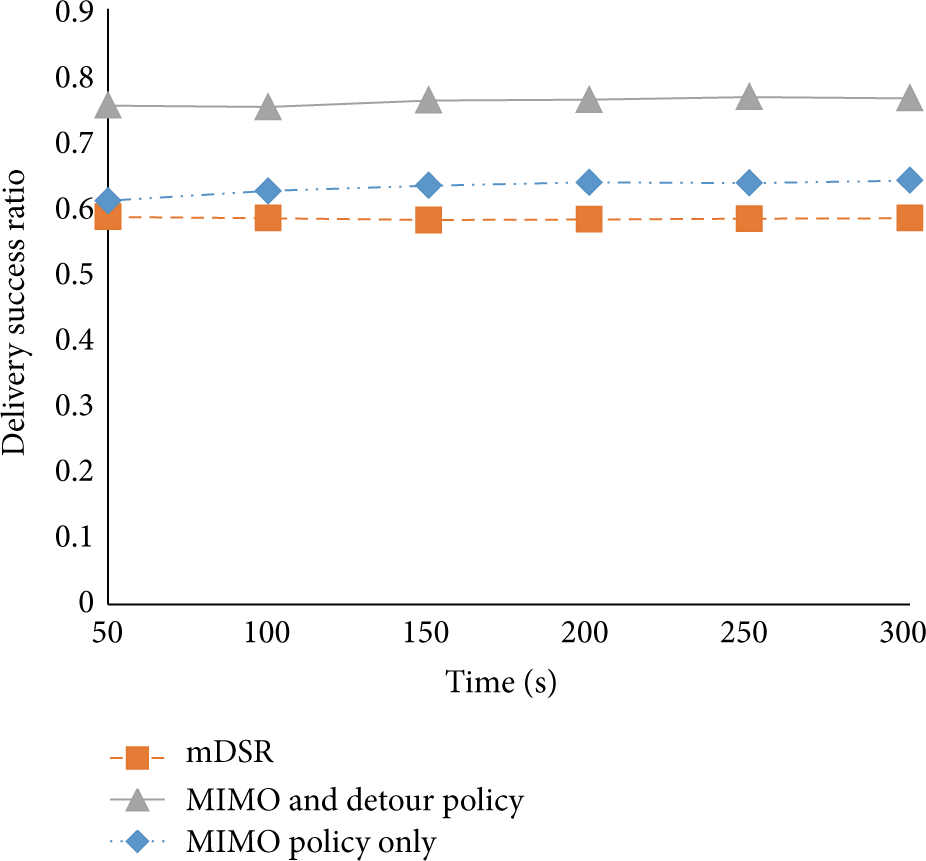
Delivery success rate (only for V2V).

Delivery success rate versus the hop count difference (only for V2V).

Delivery success rate versus the number of source and destination pairs (only for V2V).
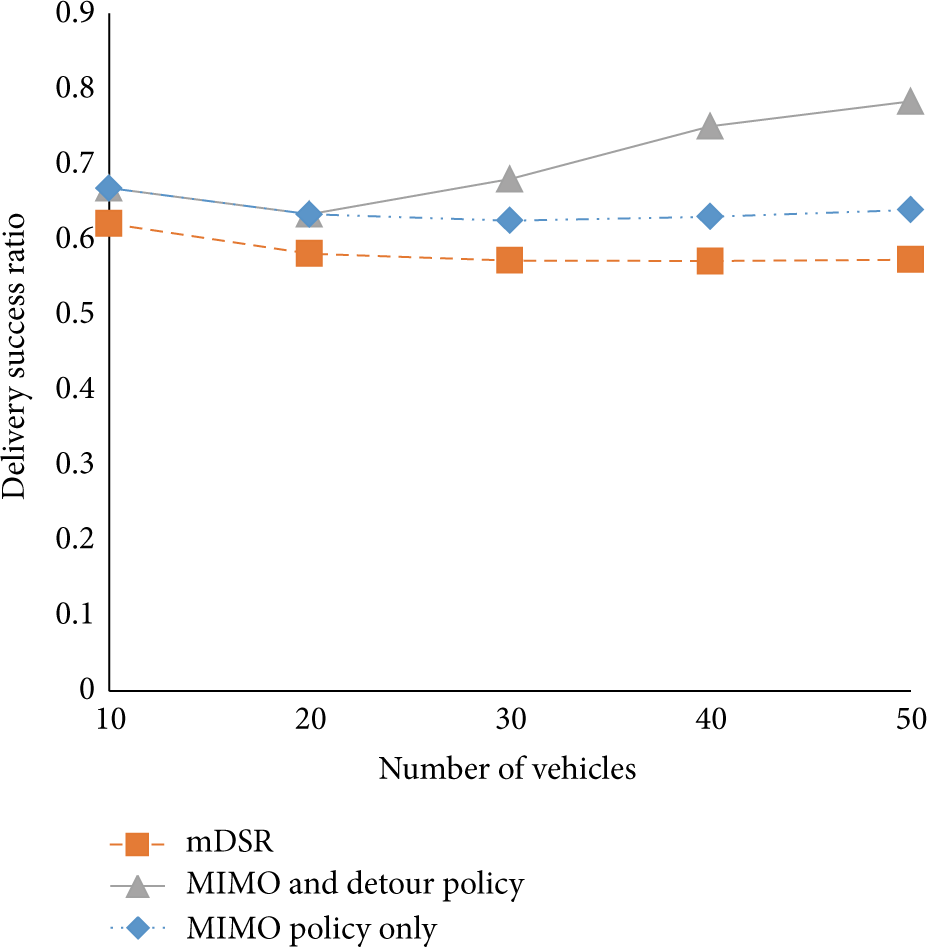
Delivery success rate versus the number of vehicles (only for V2V).
Figure 7 presents a graph of the delivery success rate for the hop count difference between the detour path and the shortest path (i.e., (the hop count of the detour path) – (the hop count of the shortest path)). When the hop count difference is 3, the MAC layer interference between the detour path and the shortest path is small enough that the performance becomes the best. On the contrary, if the hop count difference is greater than 3, the detour path performs poorly. Hence, in the latter case, we adopt P3 rather than using a detour path to relieve the congestion.
Figures 8 and 9 present the delivery success rates according to the number of source and destination pairs and to the number of vehicles, respectively. A higher number of pairs or vehicles indicate a higher probability of congestion and of interference in the middle of the shortest path. Therefore, the delivery success rates of the three schemes generally decrease as the number of pairs increases. However, the proposed scheme still provides a higher delivery success rate than the other schemes.
Even though previous studies [27–30] provide congestion control by using multipath schemes, they only solve the temporal congestion problem with node-based multipath routing or TCP layer considerations and do not apply MIMO transmission mode changes. Recently, MIR proposed a MIMO transmission mode change mechanism for only a single path case in the multihop wireless network environment. BBS introduced a new multipath on-demand quality-of-service (QoS) routing architecture for the MIMO ad hoc networks. However, BBS does not adaptively change MIMO strategies to address congestion and QoS considerations.
On the other hand, our proposed scheme is adaptive and opportunistic with respect to changes in the MIMO mode in order to resolve congestion and to provide QoS-aware multipath routing. Figure 10 shows traffic in the congested node with MIR, BBS, and the proposed scheme. The proposed scheme shows a lower congestion level than the other two schemes.

Traffic in the congested node.
Figures 11 and 12 provide results for the simulations for both V2V and V2I communications. Figures 11 and 12 show the throughput with various packet loss probabilities and SNRs (dB), respectively, of the MIMO and detour policy without the strategy from P2 to P1, the MIMO and detour policy with the strategy from P2 to P1, the MIMO policy only with multipath (i.e., BBS), and the MIMO policy only with a single path (i.e., MIR) and mDSR. The proposed scheme offers the best performance among the schemes that are compared, as expected, since our scheme opportunistically selects the MIMO transmission mode by using a detour path in V2V and a full-duplex relay vehicle in V2I.
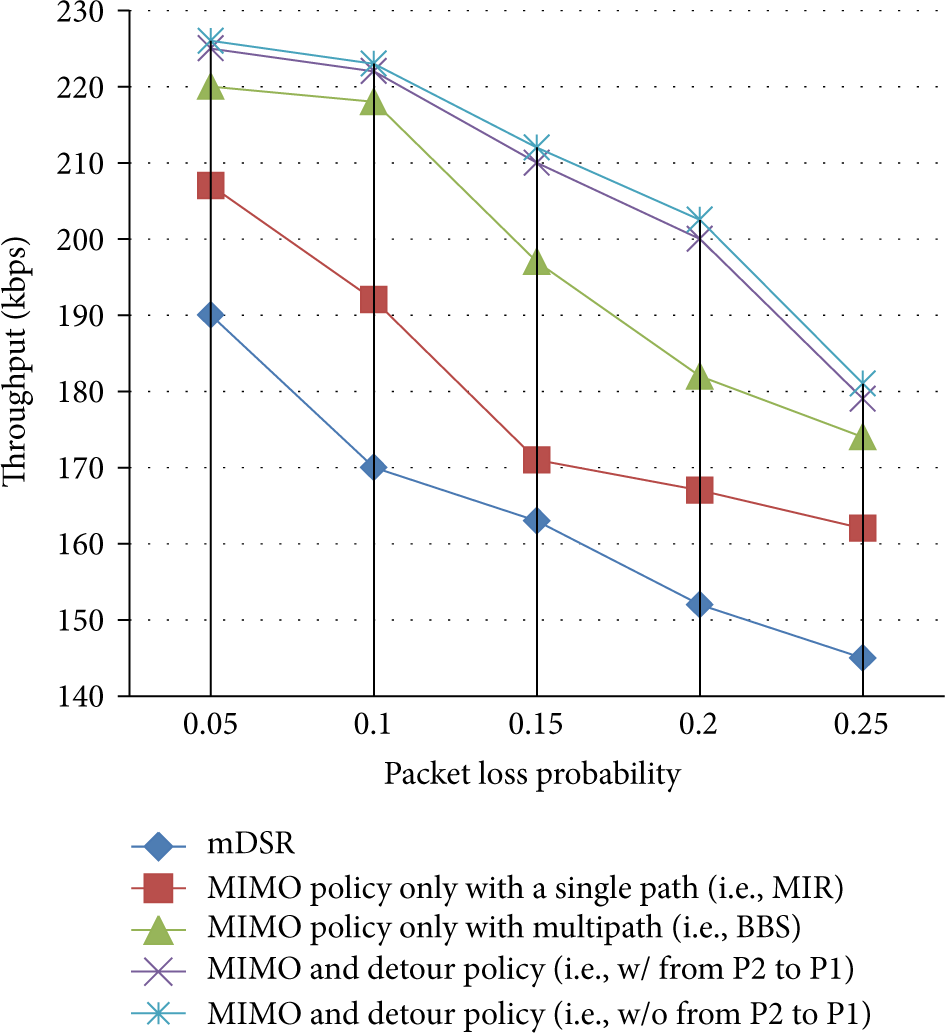
Throughput versus packet loss probability.

Throughput versus channel SNR.
5. Conclusion
VANET communications have recently become an increasingly popular research topic for wireless networking, and it has attracted a large amount of attention from government, university, and industry to develop new technologies.
In this paper, we have proposed a full-duplex relay-based hybrid transmission mechanism in MIMO-capable C-ITS. Due to the low overhead of using a single detour path and the opportunistic MIMO mode change, our proposed mechanism offers the proper solution for seamless video streaming. By performing simulations, we have shown that our proposed mechanism improves network performance when compared to mDSR and the MIMO policy-only scheme. For future work, we will attempt to figure out the optimal vehicle queue thresholds for opportunistic MIMO mode changes.
Footnotes
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Acknowledgments
This research was supported by the MSIP (Ministry of Science, ICT and Future Planning), Korea, under the ITRC (Information Technology Research Center) support program (NIPA-2014-H0301-14-1015), supervised by the NIPA (National ICT Industry Promotion Agency) and the Basic Science Research Program through the National Research Foundation of Korea (NRF), and funded by the Ministry of Science, ICT and Future Planning (NRF-2014R1A1A1003562).