
Abstract
While indoor localization has become a highly growing application domain in the last few years, it is hardly investigated in industrial environments. Interferences of magnetic fields, shadowing, and multipath propagation discourage positioning system vendors from porting their techniques to these harsh environments. However, the actual influence of these interferences on the positioning accuracy and the differences between an industrial and a nonindustrial environment have never been evaluated. This paper analyzes the actual differences for a positioning technique that is based on Wi-Fi fingerprinting, map matching, dead reckoning, filtering, and a plausibility determination. An investigation of the Wi-Fi signal strengths and compass sensor values in an industrial and a nonindustrial environment thereby showed that the differences between them are significant. In fact, it shows that more interferences and shadowing in the industrial environment resulted in even more accurate positioning.
1. Introduction
The miniaturization of embedded systems has made it possible that mobile devices, such as mobile phones, tablets, or smart watches, became a permanent companion of our everyday life. Throughout this development, context-aware mobile applications have gained more and more interest. The context information that can be used for this kind of applications could be user information, device information (e.g., screen size and device type), activity, time, and much more [1–3]. However, the most often used context information in mobile applications is location. Therefore many systems for localization have been developed, such as the Global Positioning System (GPS) or the Global Navigation Satellite System (GLONASS). Also cellular mobile communication systems (e.g., GSM, UMTS, and LTE) are suited and used for localization. While these systems are already widely used for multiple location-aware applications, they are only applicable for outdoor positioning. This is due to their requirement of a line-of-sight connection to the satellites (GPS, GLONASS) or being highly dependent on the surrounding infrastructure (for cell-based GSM localization [4]). Hence, localizing users or objects in indoor environments for location-based services has become a central topic of research in the last decades (cf. [4–6]). Similar to outdoor systems, indoor systems can also be based on time difference of arrival (TDOA). Nevertheless, they also often use the Wi-Fi fingerprinting technique which determines the position on the basis of the Wi-Fi signal pattern at the current location of the mobile device.
Possible use cases for indoor localization include tracking and monitoring objects (e.g., track objects in shopping malls or in big warehouses), navigating people to a point of interest (e.g., your departure gate at the airport), or even augmented reality games based on the current location context. Moreover, there are additional potential use cases for such kind of systems in industrial environments. For example, maintenance workers who are in control of multiple large industry halls could use the location for a context-aware system to easily locate and navigate in an industrial environment. It can help them to find machines, turbines, or other industry equipment they have to maintain. Additionally, it could give live information about the current status (e.g., health status and last maintenance) of engines, turbines, outlets, or other machines in near proximity of the worker.
In the literature it is often stated that localization in an industrial environment faces additional challenges in the system setup through radio signal deviations due to the high number of active and passive perturbations [7–11]. Active perturbations affect the environment through (i) electromagnetic influences through other pieces of industrial equipment (e.g., engines, outlets, and controls) and (ii) other radio systems in the same frequency range. Passive perturbations emerges through (i) metallic and nonmetallic walls or objects absorbing signals and resulting in shadowing effects, (ii) metallic objects (e.g., metallic meshes and pipes) that reflect and diffuse signals which produce multipath transmission, and (iii) people working in the industrial environment.
The listed literatures in this field focus on proposing and evaluating positioning systems for industrial or nonindustrial indoor environments. None of these works evaluates the actual difference between industrial and nonindustrial environments in terms of external influences and positioning accuracy for indoor-localization techniques. Hence, the focus of this work is to analyze these differences with special focus on state-of-the-art positioning techniques. For the evaluation we use a fingerprinting system as well as a combination of fingerprinting, DR, and map matching. Advantage of these systems is that they have the potential to be widely deployable in industrial and nonindustrial environments due to the availability of the technologies on current mobile devices and the advantage that they do not require line-of-sight.
The rest of this paper is structured as follows. In Section 3, we analyze the quality of compass data and Wi-Fi fingerprints for positioning in two environments: industrial and nonindustrial. Section 4 describes the used positioning techniques for the accuracy evaluation in Section 5, where we show the actual results of the study in the two environments using multiple mobile devices. Finally, we discuss the results and conclude this study in Sections 6 and 7.
Contributions of this paper can be summarized as follows:
Analysis and case study of the impact of harsh environmental influences on the position accuracy of Wi-Fi fingerprinting and compass sensor data. Evaluation of the differences of a Wi-Fi fingerprinting system and a combined positioning approach (based on fingerprinting, DR, and map matching) between an industrial and a nonindustrial environment. Evaluation of the influence of different mobile device hardware on the positioning accuracy.
2. Related Work
Finding solutions to the challenges of localizing mobile devices in an indoor environment has been a topic of research since decades. Many systems are based on fingerprinting (also called pattern matching) technique using different kinds of wireless technologies, where the most common one is Wi-Fi [12–14].
Research has also been done on indoor positioning using combinations of different methods. Judd and Vu [15] use a combination of GPS and Pedestrian Dead Reckoning (PDR). In particular they present a hardware module for PDR that is resistant against compass errors. Kemppi et al. [16] present a hybrid indoor positioning solution consisting of an angle-based localization with a multiantenna array, PDR, and map filtering. They showed that this system is well suited for many types of indoor environments. Seitz et al. [17] present an algorithm for pedestrian navigation in indoor and urban canyon environments by using a combination of Wi-Fi positioning and DR, based on a Hidden Markov Model.
There has also been work carried out that especially focuses on the localization in harsh industrial environment [14, 18]. Lewandowski and Wietfeld [10] as well as Zwirello et al. [11] also base their proposed localization system on the assumption that an industrial environment is difficult for localization systems due to the increase in multipath propagations.
Stephan et al. [8] as well as Khoury and Kamat [9] use different widespread positioning systems and evaluate how they perform in an industrial environment. Stephan et al. test Ultrawide Band (UWB) and ultrasound technology. Khoury and Kamat use Wi-Fi, UWB, and indoor GPS for their evaluation. The results of this study show a high accuracy that is possible even in a harsh environment (15 to 80 cm and 1 to 2 cm, resp.). However, the promising results are only possible for techniques where line-of-sight to the sensors is available (i.e., UWB, ultrasound, and indoor GPS). In industrial and also nonindustrial indoor environments, this is often very challenging to realize.
Metallic pipes, ventilation shafts, office furniture, or people walking around make it difficult to provide such a condition at all locations. An environment consisting of many obstacles would therefore require a lot of sensors to meet this requirement or could not constantly be able to compute positions. Hence, we focus on techniques that do not need a line-of-sight requirement.
To the best of our knowledge, no actual study has been done to evaluate the different difficulties of a Wi-Fi, PDR, and map matching based positioning system in an industrial and a nonindustrial environment. This research therefore aims to analyze the different sensor inaccuracy as well as shadowing effects in such environments and how they affect the positioning accuracy.
3. Industrial and Nonindustrial Environment Analysis
3.1. Comparing Environments
In order to analyze the viability of an indoor localization approach for industrial as well as nonindustrial environments that is based on Wi-Fi fingerprinting and DR, we made measurements of the compass accuracy and Wi-Fi fingerprint quality in two environments using, in total, three different setups:
The first setup was done in an environment that consists of a 601 square meters tall (26.7 × 22.5 m) industry hall, which can be classified as an industrial environment. This hall is usually used for compressing and storing natural gas, consisting of two big airplane turbines and many metallic pipes. The second setup was done in a multipurpose hall (17.31 × 14.55 m) in a university which we classify as a nonindustrial environment. This environment was furnished with standard office objects to appear similar to the industrial environment (i.e., we used dividing walls to simulate the outline of the turbines and the hallways), which allows us to compare the different shadowing effects of Wi-Fi signals in these environments. In the third setup, we made measurements in the same nonindustrial environment (E2) without any objects which would create shadowing effects. Such an empty hall will further support a statement on the influence of shadowing to the positioning accuracy.
For the error measurement we used four mobile devices from three different model types: 1x HTC Desire (with Android version 2.3), 2x Galaxy Nexus (Android 4.3), and 1x Samsung Galaxy S2 (Android 4.0). For the Wi-Fi fingerprinting analysis we used 5 Access Points (AP) Linksys WRT54GL in the industrial environment (E1) and 5 TP-Link TL-WR841ND APs (operating in 802.11 b/g mode) in the nonindustrial environment ((E1) and (E2)). In both setups we used the same directional antennas ALFA APA-M04 (7 dbi) for all APs.
3.2. Wi-Fi Fingerprint Analysis
In order to get accurate positions from a Wi-Fi fingerprinting system, the fingerprints at different positions should be as unique as possible and reproducible for the same position. To be able to investigate the fingerprints in the different environments we recorded multiple Wi-Fi fingerprints for each position with different mobiles for each of the investigated environments. One fingerprint at a certain position consists of the received power levels (in dBm) of the signals originated from the 5 Wi-Fi access points.
The objective of this fingerprint analysis is to rate different scenarios for their suitability for fingerprint based positioning. The first step is to define a fingerprint distance


Distances of Wi-Fi fingerprints at different positions shown as FD values (calculated with (1)) over the distances between these positions. The red curve indicates the regression line.
Shadowing effects do not influence Wi-Fi fingerprints that much in case of small position changes. Hence, the
During the online phase of a fingerprinting localization technique, small measurement errors of the received signal power levels produce fingerprints with a small
To get a figure of merit we map the distance-

Industrial Environment. Figure 1(a) shows the fingerprint analysis for the industrial environment (E1), where many metal objects and surfaces provide strong reflection and shadowing effects. But there are also line-of-sight components at almost every position. This produces quite unique fingerprints for large distances and more similar fingerprints for smaller distances due to line-of-sight components from the same Wi-Fi access points. This scenario can be considered as well suited for fingerprint positioning (
Nonindustrial Environment. Figures 1(b) and 1(c) show the fingerprint analysis in the nonindustrial environment (E2) and the empty nonindustrial environment (E3), respectively. In theses scenarios most objects and walls are nonmetal resulting in weak reflection and shadowing effects; that is, the line-of-sight components dominate. This results in more or less similar fingerprints independent of the distance of two positions. The effect amplifies in the empty nonindustrial environment (see Figure 1(c)) because of the missing objects inside the room. These scenarios are worse suited for fingerprint positioning (values of
3.3. Compass Analysis
The compass error influences particularly the accuracy of the DR positioning technique. As described in [19], this error can be computed with
Industrial Environment. In an industrial environment with many interferences, we expect the compass errors to be noticeably high on all mobile devices. In order to prove this assumption and make a statement about the feasibility of the compass accuracy for DR, we recorded the deviations of the sensor values at 39 measurement points in our test environment and published the results in a previous work [19]. The measurements were thereby done with all above-mentioned test devices where we recorded the compass values in a time frame of 5 seconds.
Figure 2(a) shows the median error values of all 39 measurement points in the industry hall. While there is a big variance between the measurement points, with median values ranging from 2° up to 88°, most error values are below 30°. As we assume that an inaccuracy of below 45° is sufficient, only 3 measurement points give problematic median error values and could cause bad positioning in a combination of the DR and MM methods.
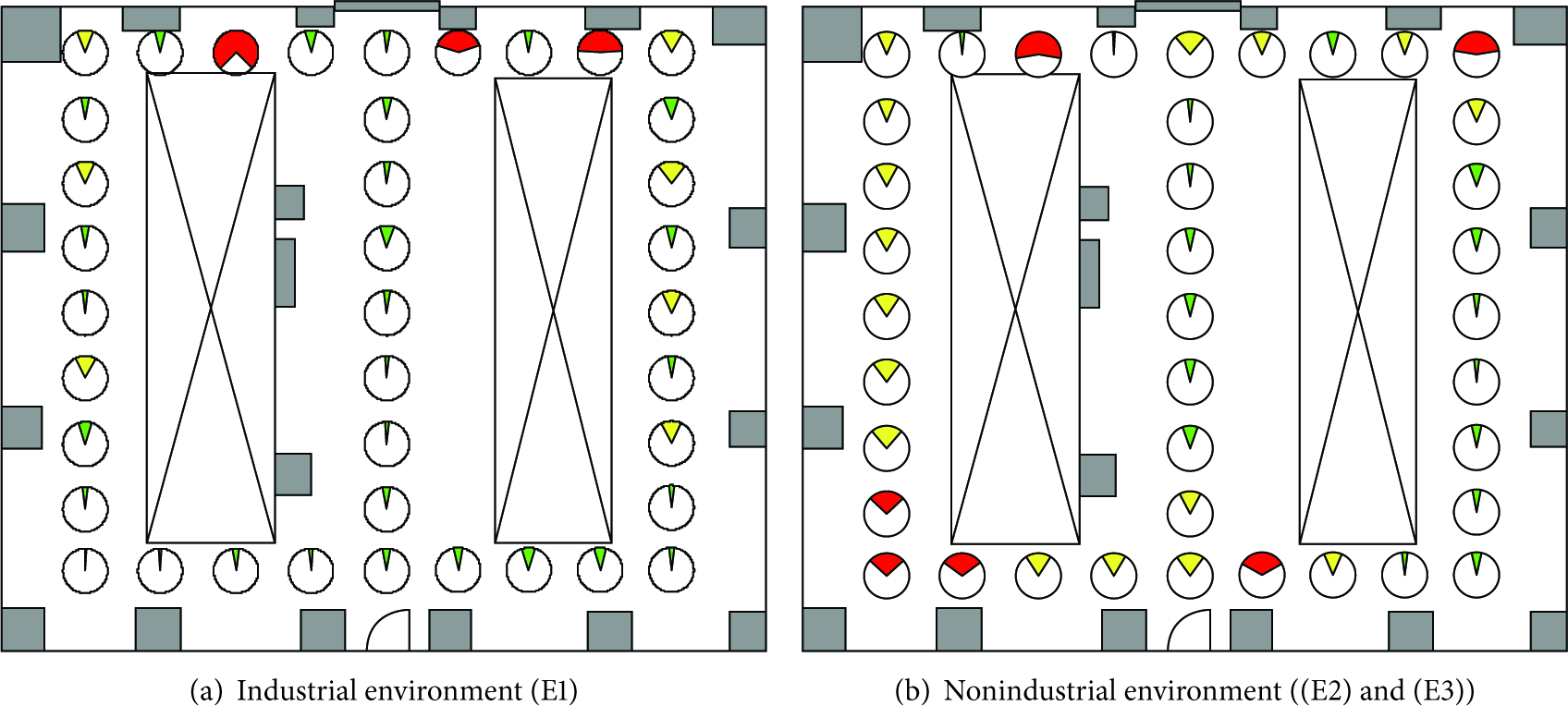
Compass error at 39 measurement points. The width and color of the circular sector indicates the median compass inaccuracy. Values above 45° are marked red, above 20° yellow, and below 20° green.
Nonindustrial Environment. Although we would have expected the compass error analysis in the nonindustrial environment ((E2) and (E3) equally) to give better overall results, the error values do not show a significant improvement compared to the industry hall. Figure 2(b) shows the median error values in an environment which does not consist of metallic objects or engines. Similar to the industrial environment, there are a few spots where problems for the indoor localization would occur (absolute values of the error above 45°). However, there are more problematic spots in the nonindustrial environment (6 measurement points) and also the overall accuracy is lower. This suggests that the compass sensor of mobile devices in an industrial environment, consisting of many interferences, is not affected more than it is in a standard environment. This is due to the fact that the compass is influenced by electromagnetic fields through electric cables or network cables in the walls at the problematic locations in the nonindustrial environment (see Figure 2(b)).
The results of this study suggest a high accuracy variance of sensor values in different regions of the industrial environment as well as in the nonindustrial environment. While this evaluation does not only show that the compass errors are not significantly different in those two settings, it also shows that localization based on compass sensor data is possible in both environments.
4. Test Systems for the Case Study in (Non)Industrial Environments
The focus of our evaluation is on positioning techniques that do not require extensive sensor assembling or reconstruction and can be applied in not only industrial but also nonindustrial environments (henceforth both are referred to as (non)industrial environment). In our terms, such techniques are based on Wi-Fi fingerprinting and dead reckoning (DR) as they do not require line-of-sight to sensors.
For the evaluation of the accuracy we therefore make use of two different positioning systems ((S1) and (S2)) that are both based on these technologies:
A pure Wi-Fi fingerprinting technique with a current industry product is adopted. The technique is further described in Section 4.1.1. We also make use of a localization system that provides accurate and robust positioning by using a combination of fingerprinting, dead reckoning, and map matching. Additionally, we use certain plausibility determinations and data filtering for new positions to provide a smooth and also robust positioning experience for the user. Such a combination is regularly used in modern systems (cf. [15, 17, 20]) and therefore gives a more realistic scenario for the evaluation of the influence of the environment on the positioning accuracy of state-of-the-art systems. The next subsections will elaborate the building blocks of this combined approach and describe how they interact with each other.
4.1. Building Blocks for Positioning ((S1) and (S2))
While each used technique is influenced differently by the environment, we make use of the advantages and characteristics of the individual techniques for a higher overall accuracy and robust positioning.
4.1.1. Wi-Fi Based Fingerprinting
The fingerprinting (also called pattern matching) localization method is based on interferences, receive signal strength, or other channel characteristics of a wireless network. It is based on the principle that every position has a certain unique wireless channel pattern. If this pattern is known, it can be used to localize mobile devices. Main advantages of the Wi-Fi based fingerprinting method are as follows: (i) Wi-Fi devices are cheap and can be produced small and lightweight, (ii) they can be used to localize indoors as well as outdoors, (iii) infrastructure (including mobile devices, such as smart phones) for Wi-Fi is often already available and no modifications are required to make use of them, and (iv) no line-of-sight to the Access Points (AP) is needed, an important advantage for indoor environments with many obstacles.
4.1.2. Dead Reckoning (DR)
DR is a method for the determination of the current location with the help of several sensors. Based on known position, heading, speed, and time you can calculate new locations of a moving object. The main problem of this method is the continuously increasing measurement error. After each iteration the errors of inaccurate sensors are carried on to the next calculation. Nonetheless, DR is an attractive localization technique as it does not require a preparation of the environment [21] and the hardware is cheap and easy to acquire.
4.1.3. Map Matching (MM)
MM is a method for processing computed positions on an associated digital map. Such a map usually holds information about the surrounding environment of the tracked object. This could include information about obstacles, tracks, roads, and areas where the tracked object cannot pass. The MM technique uses this map information to determine the most plausible position of the object on this map [22].
MM builds the third building block for positioning in the combined system (S2) and is responsible for increasing the accuracy and robustness of the computed positions in fingerprinting and DR against external influences.
4.2. Building Blocks to Increase Robustness (S2)
4.2.1. Filtering Sensor Data
In the preprocessing step, a Kalman filter [23] is applied to the accelerometer and orientation data. This helps reducing the deviation of the sensor data in mobile devices and benefits the stability of positions calculated by the DR positioning technique. Our prototype uses the JKalman (http://sourceforge.net/projects/jkalman/), a Java implementation of the filter.
4.2.2. Plausibility Determination
This determination module analyses new positions and returns a value indicating the plausibility of them. For this purpose the plausibility model computes a plausibility P based on the distance from new positions to the last plausible position and an average speed of the user. As pointed out in the previous section, the combined system (S2) makes use of MM to increase the overall accuracy by only allowing possible positions in the environment. The underlying model describes the environment with edges where a user is able to walk. Assuming only the given edges as valid walking paths, we can throw out positions that could not be reached in the given time. This is especially useful for map models with narrow hallways separated by walls. For this purpose we assume that the user is walking at an average speed of 5 and at a maximum speed of 9 kilometers per hour. With this 9 km/h, we compute the maximum possible distance a user would have been able to walk since the last plausible position (
4.3. Combining the Building Blocks (S2)
The sequence of actions to combine all building blocks is depicted in Figure 3:
The sensors in the mobile device listen to new orientation, accelerometer, and fingerprint data. If new data arrive, the listener forwards them to the DR method, respectively, to the fingerprinting analyzer. The fingerprinting analyzer forwards the Wi-Fi data to the positioning server and gets location A simple low-pass filter is applied on the fingerprint position As described in Section 4.2.1, the accelerometer and orientation data are preprocessed for DR. With this data and the last plausible position Positions, either from the fingerprint analyzer or the DR method, are the source for the combined positioning algorithm. The first step of this algorithm is to apply MM technique. The result is the position The MM position Plausibility determination is as described in Section 4.2.2. If the position was marked as plausible, it can be used in any location-aware system and will also be distributed to all methods that are interested in new positions (i.e., DR and plausibility determination). An implausible position will be discarded. In this case, the last plausible position is used as the currently valid location. In cases where there have not been plausible positions for the time period τ, we consider the plausibility determination as not trustworthy and reset it.

Sequence of actions for combining the building blocks of the combined positioning technique for indoor localization.
5. Position Accuracy in (Non)Industrial Environments
To measure the differences of the positioning accuracy between a standard indoor and a harsh environment with many electromagnetic influences and signal shadowing, we evaluated the design in the same three setups as elaborated in the environment analysis in Section 3:
an industry hall classified as industrial environment; a nonindustrial environment with standard office objects outlining the same structure of the industry hall; an empty nonindustrial environment (no objects).
The evaluation was done using the two localization systems:
A pure Wi-Fi fingerprinting bases system. The combined positioning system as described in Section 4.
Both positioning prototypes for the accuracy measurements were implemented as an Android application. The fingerprinting positioning for (S1) as well as (S2) was done with the Ekahau real-time location system 4.0 (http://www.ekahau.com). For the evaluation we used the same mobile devices as those described in the environment analysis in Section 3: 1x HTC Desire, 2x Galaxy Nexus, and 1x Samsung Galaxy S2. For the Wi-Fi fingerprinting we also used the same 5 Access Points (AP) in the industrial environment (Linksys WRT54GL) and nonindustrial environment (TP-Link TL-WR841ND). In both scenarios one additional AP was used for the communication between client and server. The fingerprint database was recorded before the measurements using the Ekahau Location Survey 4.0 and a standard laptop with an external wireless cardbus adapter from D-Link (DWL-AG660). The current position of the Wi-Fi fingerprinting building block was also computed by the standard Ekahau server software. Corresponding fingerprints for this computation were recorded every 3 to 4 seconds on the mobile device by our prototype.
In advance of this evaluation, we also conducted a pilot study to investigate adequate parameters for the building blocks in (S2). Results of this study were a threshold T of
5.1. Evaluation Goals
The goal of this evaluation is to make statements of the environmental influences on the positioning accuracy by the variation of localization systems and mobile devices.
Different Localization Systems. First of all, we compare the positioning errors of systems (S1) and (S2) in all three environmental setups (E1), (E2), and (E3). Both evaluated systems in the same environmental setup (E1), (E2), and (E3) use the same fingerprint database.
Different Devices. One of the big challenges of creating a positioning system for mobile devices is the influence of different sensor hardware in different mobile devices. Particularly in the combined approach (S2), where multiple sensor values are used for positioning (i.e., compass and accelerometer for DR and Wi-Fi signal strength for fingerprinting), the hardware variance can significantly reduce the accuracy of a localization system [24]. To measure this influence of different hardware components in setups (E1) and (E2), we compare the results of three different mobile devices using the combined positioning system (S2).
5.2. Measurement Procedure
We evaluated the influence of shadowing effects on a pure Wi-Fi fingerprinting (S1) and the combined system (S2) by measuring the positioning accuracy in a continuous walk. To get the correct position of the mobile device, the test users were asked to walk a predefined route with 50 measurement points in the test environments ((E1), (E2), and (E3)) within a defined time frame. The application gave the user permanent feedback about the next measurement point on the route. To create a more realistic scenario, we chose points which are not on the MM graph of the combined positioning approach (S2).
Error computation in the pure fingerprinting (S1) system is straightforward: calculate distance between computed position by the fingerprinting algorithm and actual position. The error in the combined approach (S2) is computed as follows: when the user walks along the route, the combined system (S2) computes a position. With the knowledge of this computed position and the current measurement point, the application calculates the localization error of the tracked device on the map matching graph. Figure 4 depicts the route a test user had to walk and the computation of error based on the measurement points on the route and the computed position.

Measurement procedure of the error analysis with the combined system (S2). The green line indicates the walking route of the tracked devices and the × marks the measurement points on that route. The position error computation is depicted in the red circle and done by computing the distance between the matched position on the graph and the measurement points.
5.3. Results
In Section 3, we evaluated Wi-Fi fingerprinting quality based on the pure Wi-Fi signal strengths and compass sensor values. The following results show the actual position accuracy using the combined positioning approach (S2) as well as a pure Wi-Fi fingerprinting system (S1) for localization in (non)industrial environments ((E1), (E2), and (E3)).
5.3.1. Different Localization Systems
Industrial Environment (E1). The median, mean, and maximum error values of the two different systems ((S1) and (S2)) are listed in Table 1. The median positioning errors of the combined approach (S2) (1.52 m) is 1.3 meters less than a pure fingerprinting system (S1) (2.82 m). The mean error values of the different positioning approaches give similar results and the two-sample t-test indicates a significant difference between (S1) (
Median, mean, and max error values of the positioning systems (S1) and (S2) in the industrial environment (E1) (in meters).

The maximum error values are higher in (S2) (12.22 m) than in (S1) (9.63 m). This occurred in (S2) if the initial position of fingerprinting was far off the correct location of the mobile device and the upcoming positions were therefore assumed to be implausible.
Nonindustrial Environments ((E2), (E3)). Table 2 lists the accuracy values of a pure Wi-Fi fingerprinting (S1) system and the combined positioning technique (S2) in the nonindustrial environments ((E2) and (E3)). In the environment with objects (E2), the error values for (S1) are 5.65 meters (median) and 6.76 meters (mean). In contrast to the industrial environment (E1), the differences to (S2) with a median value of 5.29 meters and a mean of 6.35 meters are negligible in (E2). Also Figure 5 shows that the difference between (S1) (Figure 5(b)) and (S2) (Figure 5(e)) in (E2) is minor. Both systems have good accuracy results in the upper regions of the environment (mainly below 2 m), while giving worse results in the left and lower regions (mainly above 4 m). The reason for this similar error values is related to the usage of map matching in the combined system. With increasing error values of the fingerprinting system, positions would be matched on incorrect edges of the map matching graph. Hence, the combined system does not improve the accuracy in such a situation.
Median, mean, and max error values of the positioning systems (S1) and (S2) in the nonindustrial environments ((E2) and (E3)) (in meters).


Position accuracy comparison of the fingerprinting technique (S1) and the combined positioning system (S2) in the industrial (E1) as well as nonindustrial ((E2) and (E3)) environments. The rows depict the values of the same positioning system ((S1) or (S2)); the columns depict the results for one environmental setup ((E1), (E2), or (E3)). Circles indicate median error values at measurement points: red > 4 m, orange > 3 m, yellow > 2 m, and green > 0 m.
Figures 5(c) and 5(f) depict the accuracy results of (S2) in an empty nonindustrial environment (E3). Both figures show that the accuracy gets worse in this empty hall compared to the setups (E1) and (E2). Unlike in environment (E1), the difference between the positioning systems (S1) (Figure 5(c)) and (S2) (Figure 5(f)) is noticeable in the figures and the error values (difference of the median error value between them is 2.08 m). However, the error values are already very high (9.15 m in (S1) and 7.37 m in (S2)) and the improvement is therefore not significant.
Overall, the positioning accuracy of the combined system (S2) in the industrial environment (E1) (see Figure 5(d)) showed significantly better accuracy results than in the nonindustrial environment setups (E2) and (E3) (see second row in Figure 5). Differences of the median error values are 3.77 and 5.85 meters, respectively. Also the pure fingerprinting system (S1) gets worse in the nonindustrial environments (E2) and (E3) (see first row in Figure 5). Differences of the median error values are 2.83 and 6.33 meters, respectively. While the often as harsh environment referred to hall shows position errors mainly below 2 meters, the nonindustrial environment ((E2) and (E3)) primarily has values above 3 meters.
Conclusion. These results suggest that the harsh environment, with a lot of active and passive perturbations through metallic objects or engines, is even better for the combined localization technique. The main reason for this improvement is the higher variance of Wi-Fi signals through more shadowing effects which subsequently leads to better distinguishable fingerprints.
5.3.2. Different Devices
Industrial Environment. Table 3 lists the median, mean, and maximum error values of the used mobile devices in the industrial environment (E1) using the combined system (S2). It depicts a low variance in the error values between the different devices. The median error values only range from 1.36 to 1.63 meters. This suggests that the positioning accuracy difference between the devices can be neglected in the industrial environment (E1).
Median, mean, and max error values of the combined localization technique (S2) in an industrial environment (E1) on different devices (in meters).

Nonindustrial Environment. The error values of measurements with different mobile devices in a nonindustrial environment (E2) using the combined system (S2) are listed in Table 4. With a median value of 3.5 meters, the Samsung Galaxy S2 gave the best results. Of note, the difference compared to the HTC Desire, giving the worst results, is significantly high. Also the differences of the median error values of the two Galaxy Nexus devices, compared to the Desire (2.69 m) and the S2 (1.64 m), depict the high variance of the accuracy values. In contrast to that, the error values of different devices of the empty hall (E3) do not vary that much (difference of median error values of 0.65 m and mean error values of 2.22 m). However, the median and mean accuracy values in this environmental setup are already very high and problematic for positioning (note: the measurements of the HTC Desire in (E3) could not be included in the final results due to recording issues). These results suggest that there is an influence of mobile device hardware in the nonindustrial environments (E2) and (E3).
Median, mean, and max error values of the combined localization technique (S2) in the nonindustrial environments ((E2) and (E3)) on different devices (in meters).

Conclusion. The results of the nonindustrial environment analysis contradict to the results of the device dependency in the industrial environment. While in the harsh environment the usage of a variation of mobile devices did not have a high impact on the final positioning accuracy, the results in the nonindustrial environment (E2) suggest that different sensor hardware do influence the positioning accuracy of a system based on fingerprinting, dead reckoning, and map matching (more in Section 6).
6. Discussion
The environment analysis in Section 3 showed that Wi-Fi fingerprints in an industrial environment are better distinguishable than in a nonindustrial environment. Due to more shadowing effects in an environment with many metallic and nonmetallic objects, the Wi-Fi signal strength varies more between the measurement positions. Such a channel behavior leads to more unique fingerprints and therefore better positioning accuracy. This was further approved by the analysis of the Wi-Fi fingerprinting quality between an empty and a stuffed nonindustrial environment.
Exactly the same behavior was shown in the position accuracy analysis in Section 5 where also the industrial outperformed the nonindustrial environment. With a positioning error difference between (E1) and (E2) of 3.77 meters in the combined and 2.83 meters in the pure fingerprinting approach (median error values), we can state that an industrial environment is very well suited for localization systems based on Wi-Fi fingerprinting.
With the results of our evaluation, we can further state that the device dependency of the combined system in an industrial environment is minor. Although the compass error and Wi-Fi fingerprints can highly vary between different hardware and software (e.g., different Wi-Fi driver, Android kernel) of the used mobile devices (cf. [19, 24]), the overall positioning accuracy did not show a significant difference. However, there is a clear influence of the hardware or software of the used mobile devices on the positioning accuracy in the nonindustrial environment. We assume that this is due to the poorly distinguishable fingerprints due to less variance of the Wi-Fi signal. This leads to a higher dependency of the positioning accuracy on the precision of the recorded Wi-Fi signal. Measurement errors and differences in the Wi-Fi fingerprint recordings of different mobile devices have therefore a higher impact on the localization accuracy in the nonindustrial environment. However, due to the wide range of mobile device hardware and their fast changing market, we were only able to choose a representative selection of current devices. An evaluation with more devices will therefore be part of the future and ongoing work.
7. Conclusion
This paper evaluated the impact of electromagnetic influences and shadowing effects in an industrial environment on the accuracy of positioning systems that are based on Wi-Fi fingerprinting and dead reckoning. For this evaluation purpose we provided a state-of-the-art localization system which uses a combination of Wi-Fi fingerprinting, dead reckoning, map matching, filtering, and plausibility determination methods.
In a case study within an industrial and a nonindustrial environment of similar size, we analyzed the actual differences of compass values and the Wi-Fi fingerprinting quality in three different setups. The results showed that positioning based on Wi-Fi fingerprinting and DR gives even better results in an industrial environment (overall median accuracy of 1.52 meters) than in a nonindustrial environment (overall median accuracy of 5.29 meters).
Footnotes
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Acknowledgments
The authors would like to thank AugmenSys for the financial support and giving them the possibility to test their system in an industrial environment. This work has partly been carried out within the scope of u'smile, the Josef Ressel Center for User-Friendly Secure Mobile Environments. They gratefully acknowledge funding and support by the CDG, A1 Telekom Austria AG, Drei-Banken-EDV GmbH, LG Nexera Business Solutions AG, and NXP Semiconductors Austria GmbH.