
Abstract
Underwater Acoustic Sensor Networks (UASNs) offer their practicable applications in seismic monitoring, sea mine detection, and disaster prevention. In these networks, fundamental difference between operational methodologies of routing schemes arises due to the requirement of time-critical applications; therefore, there is a need for the design of delay-sensitive techniques. In this paper, Delay-Sensitive Depth-Based Routing (DSDBR), Delay-Sensitive Energy Efficient Depth-Based Routing (DSEEDBR), and Delay-Sensitive Adaptive Mobility of Courier nodes in Threshold-optimized Depth-based routing (DSAMCTD) protocols are proposed to empower the depth-based routing schemes. The performance of the proposed schemes is validated in UASNs. All of the three schemes formulate delay-efficient Priority Factors (PF) and Delay-Sensitive Holding time (
1. Introduction
From the very beginning, oceans are essential way of transportation, military actions, and distributed tactical surveillance. For all these applications, Underwater Acoustic Sensor Networks (UASNs) employ sensor nodes to detect physical attributes such as temperature and pressure. There are vast applications of UASNs such as assisted navigation, ocean sampling, mine reconnaissance, and pollution monitoring, which demand time-critical and delay-sensitive routing protocols. These applications surpass the requirements of energy-efficient and delay-tolerant routing designs. Therefore, there is a need of delay-sensitive routing protocols in UASNs, which forward the sensed data towards the Base Station (BS) with a minimal time lag. There is also a requirement of routing protocols in large-scale distributed networks to tackle the high propagation delays in localization-free environment as the underwater activities encompass hundreds to thousands of kilometers. There are two major categories of underwater routing protocols: (i) localization-free and (ii) localization-based routing protocols. Localization-free routing protocols do not require location information of sensor nodes for data forwarding; however, localization-based protocols route data towards the BS on the basis of location information of the sensor nodes.
In localization-free protocols, sensor nodes conventionally depend on their depth information to forward data efficiently, as it considers continuous movement of sensor nodes in aqueous environment. Akyildiz et al. in [1] investigate several aspects of underwater routing and its challenges and categorize their issues according to network protocol stack. They also discuss open research issues in 2-dimensional and 3-dimensional UASNs.
In this paper, we have proposed improved delay-sensitive versions of DBR, EEDBR, and AMCTD to make them adaptable for time-critical applications. This work is an extension of [2]. These new schemes are verified and validated through simulations in the UASNs. We have applied delay and channel loss models in depth-based routing protocols of DBR, EEDBR, and AMCTD to examine their effects in delay-sensitive routing. The main concern is to minimize huge propagation delays along with maintaining other parameters such as network lifetime and number of transmissions. We prefer localization-free routing protocols as sensor nodes move with a speed of 2-3 knots and it is difficult to identify their location information. It is important to examine the deficiencies of these flooding-based protocols as they depict the practical acoustic conditions.
2. Related Work
Extensive research has been done on UASN routing protocols in recent years due to their worth applications. Their primary requirement is adaptability with the delay-tolerant and delay-sensitive applications. Furthermore, the drawback of any specific method is viewed as an advantage to its contrasting scheme.
Depth-Based Routing (DBR) [3] proposes flooding based approach in which sensor nodes forward data solely on the basis of their depth information. It is one of the best localization-free routing schemes of UASN which utilizes acoustic signals to tackle error-prone underwater conditions. EEDBR [4] enhances the network lifetime and improves path loss by computing holding time (
Wahid and Dongkyun [6] investigate UASN routing schemes and classify them according to their priorities in UASN. Tolba et al. [7] propose Delay Tolerant network (DTN) routing protocol to tackle continuous node movements and utilize the single-hop and multihop routing. They also attempt to minimize collision overhead at the Medium Access Control (MAC) layer.
Luo et al. [8] propose energy balancing strategies in an underwater moored monitoring system in order to deal with sparse conditions. They provide a mathematical model to investigate the power consumption of sensor nodes. These schemes provide higher stability period at the cost of higher delay or increased path loss. Furthermore, there are also some energy-efficient protocols in all types of UWSNs such as Round-Based clustering (RBC) [9] and Link-State Based routing (LSB) [10]. The main designing concern of these schemes is the minimization of energy consumption of the sensor nodes. These protocols propose different technical solutions for this purpose at physical, MAC, and routing layer. These schemes assume the water condition, according to the depth of the sender and receiver node, as there is a large difference between the parameters of shallow and deep water. At the MAC layer, the major problem is the large number of transmission collisions which can also be handled by the routing protocols. Chao and Lu [11] minimize the transmission collisions by proposing an efficient multichannel MAC layer protocol. Moreover, RBC minimizes the amount of redundant data transmission by utilizing cluster formation. In [12], the authors study the effects of frequency scaling over channel capacity. They achieve a high quality of signal by utilizing multihop communication in dense UASNs.
In addition, to the above mentioned schemes, there are also some delay-sensitive protocols proposed for UWSN. Mobicast Routing Protocol (MRP) [13] suggests adaptive mobility of Autonomous Underwater Vehicle (AUV) to collect data with a minimum end-to-end delay. It applies “
Pompili and Melodia [15] suggest the paradigms for both delay-sensitive and delay-insensitive techniques in UWSN by formulating Integer Linear Programming models. Zhou et al. [16] suggest Multipath Power control Transmission (MPT) protocol to ensure a guaranteed end-to-end delay and minimum Bit Error Rate (BER) in challenging acoustic channels. It formulates optimal energy distribution models for unipath and multipath communication. In [17], the authors devise multisubpath routing to minimize propagation delays along with improving packet delivery ratio in UWSN.
We have selected DBR, EEDBR, and AMCTD for the analysis because these are depth-based routing protocols. In this paper, the main focus is on the improvement of notable depth-based routing protocols in UWSNs. There is a large end-to-end delay in these protocols due to calculation of holding time and long transmission distance between sender and receiver node. Having minimized delay, these protocols perform well in the delay-sensitive applications of UWSNs. Moreover, EEDBR and AMCTD have high network throughput, whereas the major deficiency is high end-to-end delay which has been overcome by their delay-sensitive versions. DBR is the initial routing protocol in the category of depth-based routing and its major deficiency is also a high delay due to large nodal delay.
We discuss the underwater channel model in Section 3. Section 4 presents the problem statement of DBR, EEDBR, and AMCTD. Sections 5, 6, and 7 contain brief explanation of our proposed protocols DSDBR, DSEEDBR, and DSAMCTD, respectively. Simulation results are presented in Section 8 and, finally, Section 9 concludes the paper.
3. Underwater Channel Model
In this section, we analyze the effects of acoustic channel characteristics on the speed and end-to-end delay of the signal. We propose an analytical model to compute the propagation delay in data transmissions, as shown in Figure 1. The propagation delay for acoustic signal is five times greater than the terrestrial radio signals due to multipath and fading effects and depends on the attenuation coefficient due to high BER in aqueous environment. The end-to-end delay between the sender and receiver is given by

where


Equations (2), (3), and (4) show the computations of propagation delay for multihop, single-hop, and direct communication, respectively.

Propagation delay in multihop communication.
In (5), we compute the propagation delay

where d is the distance between the sender and receiver in m and q is the speed of signal in m/s which is calculated as follows [18]:

In the above equations, T is the temperature in °C, S is salinity in
3.1. Acoustic Attenuation Models
Underwater channel efficiency depends primarily on the attenuation coefficient for the inter-nodal distances. This coefficient is characterized by different factors such as depth of sensor nodes and distances between them. Furthermore, path loss increases with the increase in frequency of signal. We have thoroughly reviewed the attenuation losses in both Thorps [19] and Monterey-Miami Parabolic Equation (MMPE) [20] models. Thorps computes the total attenuation loss

In (7), the first term refers to spreading loss and the second term denotes the absorption loss, which are measured in
Research shows that the molecular movement of acoustic signal is highly affected by the random noise and wave motion, which can be detected by increasing the complexity of the improved models along with their enhanced accuracy. MMPE [22] model computes the Transmission Loss (TL) as

where
Figures 2 and 3 show the effect of TL on DBR and EEDBR as predicted by Thorps and MMPE models.
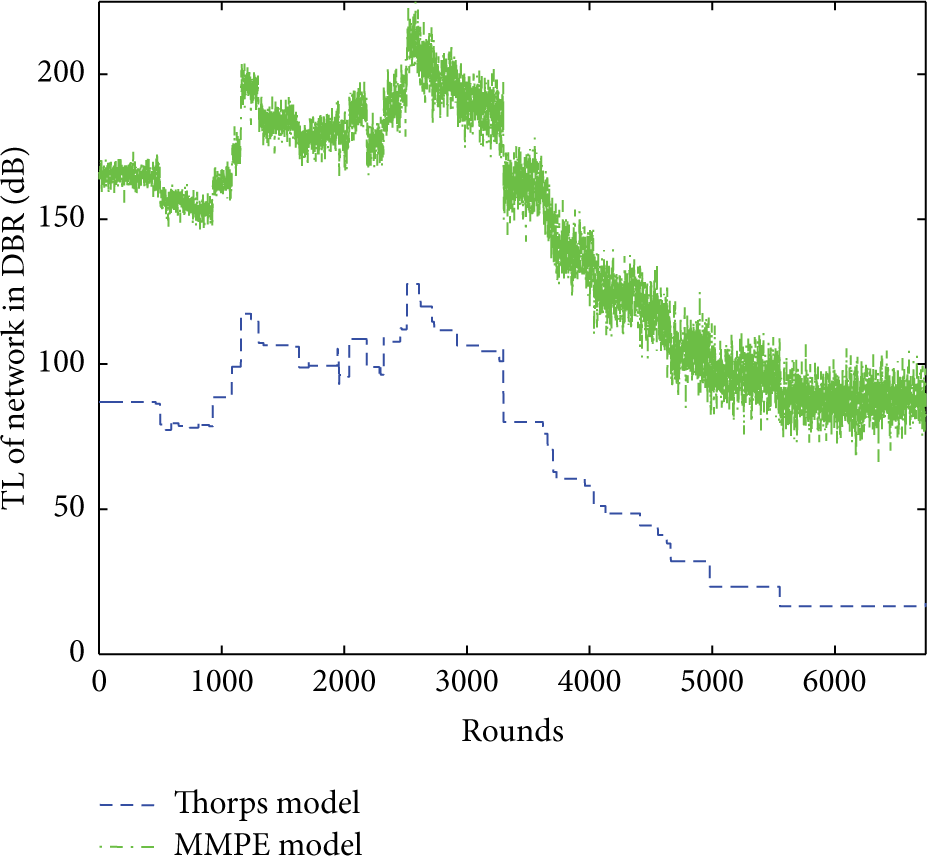
Comparison of TL calculation in DBR by Thorps and MMPE models.

Comparison of TL calculation in EEDBR by Thorps and MMPE models.
4. Problem Statement
Depth-based routing protocols use natural characteristics of acoustic communication as they do not require localization information and completely depend upon the depth information of sensor nodes. There is high end-to-end delay in DBR, EEDBR, and AMCTD which is unsuitable for delay-sensitive routing applications. Therefore, in terms of high end-to-end delay, the following major observations were noticed in the above mentioned protocols.
In DBR, there are distant transmissions between the sensor nodes specifically in the medium-depth region introducing large propagation delay.
In EEDBR, the delay conditions are improved than in DBR; however, there is lack of load balancing in the low-depth region due to multiple forwarding and number of transmissions of data packets.
Presence of courier nodes improves the throughput in AMCTD but, however, does not minimize end-to-end delay of network remarkably.
In this paper, we propose improved delay-sensitive versions of DBR, EEDBR, and AMCTD to remove above-discussed deficiencies.
5. Delay-Sensitive DBR
Delay Sensitive Depth-Based Routing (DSDBR) is an improved version of DBR, which not only performs routing on the basis of depth information but also employs Holding Time (


Data Transmission in DSDBR.
5.1. Data Forwarding Phase
DSDBR works on the principle of greedy algorithm and nodes with a lower depth forward data towards BS. Each eligible neighbor computes Forwarding value
where

where α is used as a constant and depends upon the network size. The value of α determines the difference between the

Using (12), each node calculates
An optimal value of

Forwarding mechanism of DSDBR.
6. Delay-Sensitive Energy-Efficient DBR
Delay-Sensitive Energy-Efficient DBR (DSEEDBR) provides enhanced network lifetime along with delay sensitivity to EEDBR by implementing Delay-Sensitive Holding time (

Data transmission in DSEEDBR.
6.1. Variations in
DSEEDBR exploits the inefficient approach of constant
6.2.
Estimation
DSEEDBR proposes faster data forwarding mechanism than EEDBR by estimating

where
7. Delay Sensitive AMCTD
Delay-Sensitive AMCTD (DSAMCTD) employs variations in
7.1. System Model and Network Initialization
AMCTD formulates energy-efficient

Variations of
7.2. PF Formulation
DSAMCTD devises PFs for sensor nodes to manage delay-efficient data transmission. During initialization phase, each sensor node estimates the number of neighbors within its transmission range and finds its


During instability period,

In extreme sparse situation,

Data transmission in DSAMCTD.

PF computation in DSAMCTD.
8. Performance Evaluation and Analysis
In this section, we examine the performance of DSDBR, DSEEDBR, and DSAMCTD and analyze their simulated effects in realistic acoustic conditions. All the three proposed schemes improve the end-to-end delay in the routing protocols of DBR, EEDBR, and AMCTD by allowing small decrease in network throughput. Using these performance parameters, we estimate the TL specifically in the low-depth region in order to provide efficient data forwarding. Effects of combined noise caused by shipping, turbulence, and thermal activity have been calculated. Same simulation scenario and specifications are employed for all the proposed protocols.
8.1. Simulation Scenario
In all simulations, we have assumed a network dimension of
8.2. Simulation Results and Analysis
This section is devoted for the performance evaluation, verification, validation, and comparison of our three proposed protocols with the conventional ones in Wireless Sensor Networks (particularly UASNs). In the following subsections, each enhanced scheme is compared with the existing one.
8.2.1. Comparison of DBR and DSDBR
First of all, we compare DBR and DSDBR to analyze the functioning of our proposed scheme in terms of different performance parameters. The default transmission time and receiving time of data packet for all sensor nodes are 40 ms and those of control packets are 10 ms. We also assume that sensor nodes employ a frequency of 25 kHz for acoustic communication. In Figure 10, we analyze the total energy consumption in DBR and DSDBR. DSDBR faces tradeoff between decreased end-to-end delay (Figure 12) and increased total energy consumption; however, it allows a small decrease in network throughput (Figure 11). In the earlier rounds of DBR, there is an increase in number of transmissions which increases the network throughput along with end-to-end delay. In DSDBR, the network attempts to remove distant transmissions by selecting optimal data forwarders on the basis of their received packet's TL and q. Figure 11 depicts that, in DBR, a number of packets received by sink are higher than DSDBR. In the initial rounds, throughput of DSDBR is lower than that of DBR. In DBR, high throughput in the initial rounds reduces the number of available forwarding nodes during instability period. In later rounds of DBR, there is a quick average energy consumption of sensor nodes causing creation of energy holes in the network.

Total energy consumption in DBR and DSDBR.

Network throughput in DBR and DSDBR.
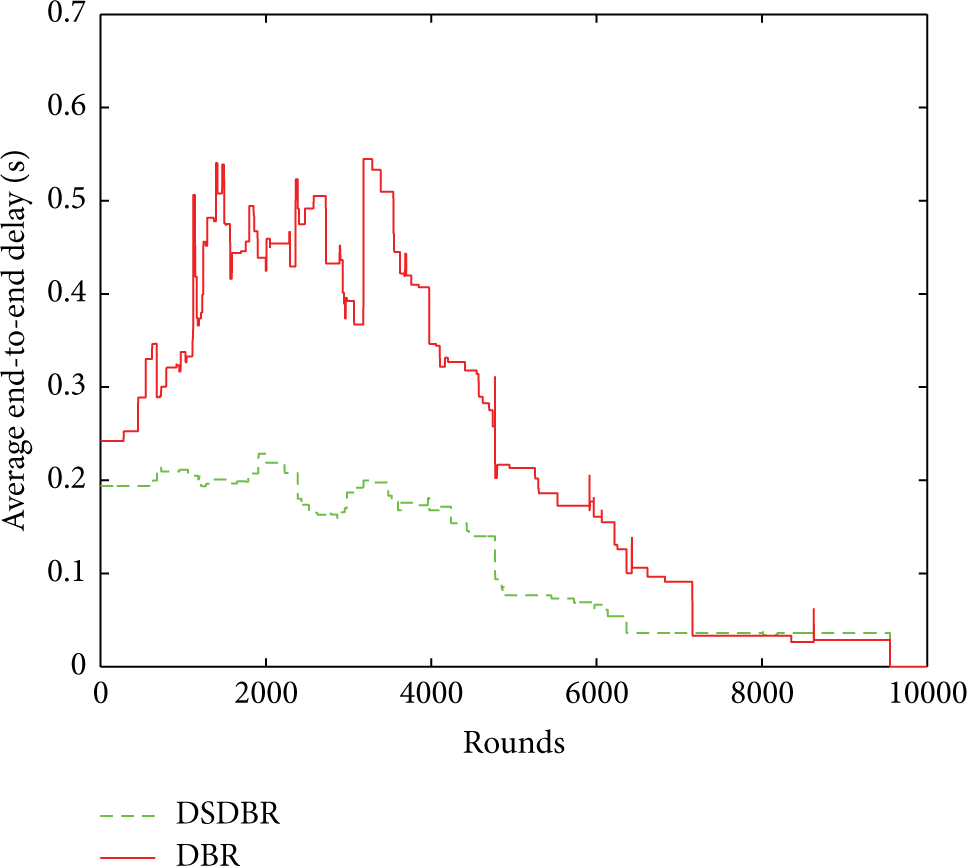
End-to-end delay in DBR and DSDBR.
Figure 12 illustrates the average decrement in delay of our proposed scheme in comparison to DBR. After 5000 rounds, there is a major decrease in delay of DSDBR at the cost of small decrement in network density. However, in DBR, there is increase in end-to-end delay which is primarily due to high TLs for remaining distant nodes. Furthermore, end-to-end delay depends upon salinity, temperature, depth, and TL of an acoustic signal. Nodal delay is also important; however, propagation delay mainly affects total end-to-end delay. After 1000 rounds, during the instability period of DSDBR, throughput remains higher than that of DBR along with minimum energy consumption and lesser end-to-end delay as shown in Figures 9, 10, and 11. The key cause of reduced delay in DSDBR in later rounds is low network density and availability of suitable data forwarders. Therefore, DSDBR is 48% more efficient than DBR in terms of end-to-end delay by compromising on low throughput and less stability period. Figure 13 shows that DBR has larger delay than DSDBR with the change in number of nodes. As the number of nodes increases, the delay in DBR is increased largely due to large aggregated holding time. In DSDBR, there is not a large increase in delay with increase in number of nodes due to selection of data forwards at the intermediate depth difference from the sender.

Comparison of DBR and DSDBR in terms of delay.
8.2.2. Comparison of EEDBR and DSEEDBR
In Figure 14, we compare TL of EEDBR and DSEEDBR. It illustrates that TL is higher in EEDBR than the proposed scheme, which is caused by a large number of transmissions and multiple retransmissions for same packets. In EEDBR, due to high network density in initial rounds, there is less transmission loss which increases dramatically with a decrease in the number of available forwarders in low-depth regions. Nevertheless, it delivers higher throughput than our proposed scheme due to increased stability period. DSEEDBR maintains low TL throughout the network lifetime by decreasing load on low-depth nodes; however, it compromises on network throughput in the initial rounds.

Comparison of transmission loss (dB) in EEDBR and DSEEDBR.
Figure 15 depicts average end-to-end delay in EEDBR and DSEEDBR. It shows gradual decrease in delay of DSEEDBR along with changes in TL (Figure 16) of the network. It illustrates slower network activity in EEDBR which is not suitable for time-critical applications. After 2000 rounds, there is a sharp increase in delay of EEDBR due to quick energy consumption of nodes deployed in medium-depth region. DSEEDBR decreases end-to-end delay of the network by incrementing
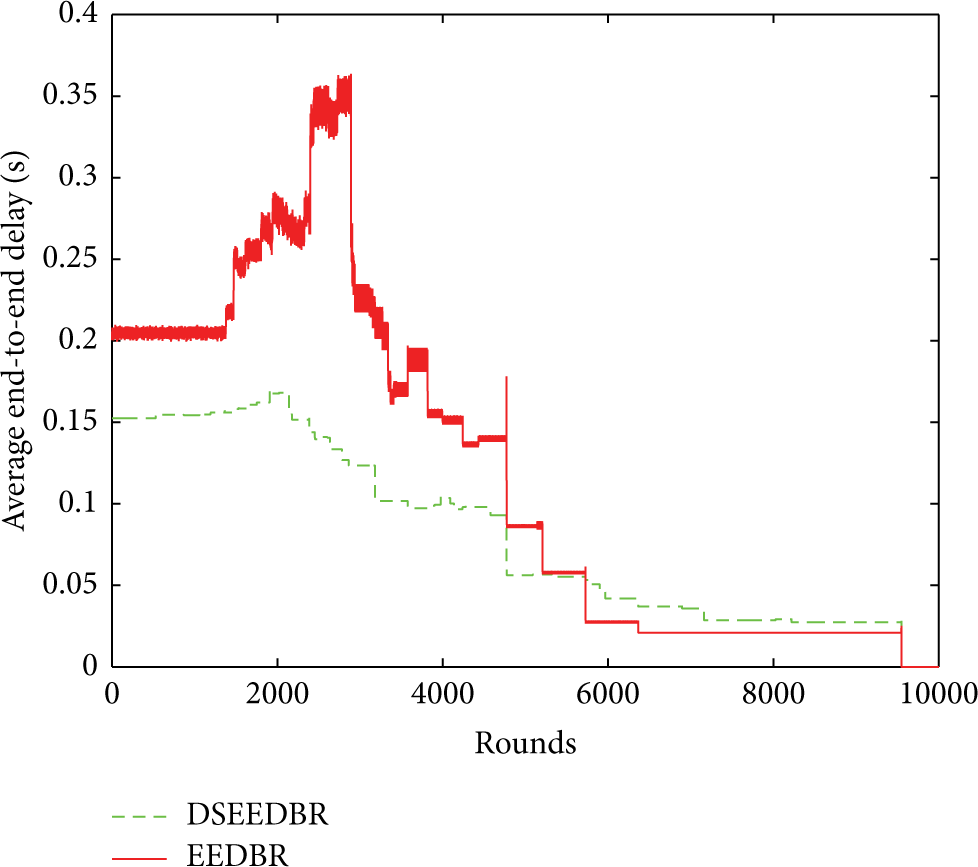
End-to-end delay in EEDBR and DSEEDBR.

Number of transmissions in EEDBR and DSEEDBR.
Figure 16 shows the comparison of number of transmissions in EEDBR and DSEEDBR. It also shows that, in spite of low throughput in stability period before 2000 rounds, there are a high number of transmissions in EEDBR which increase rapidly in the later rounds.
Our proposed protocol minimizes delay by reducing the number of transmissions in the network. It compromises on network throughput to achieve low
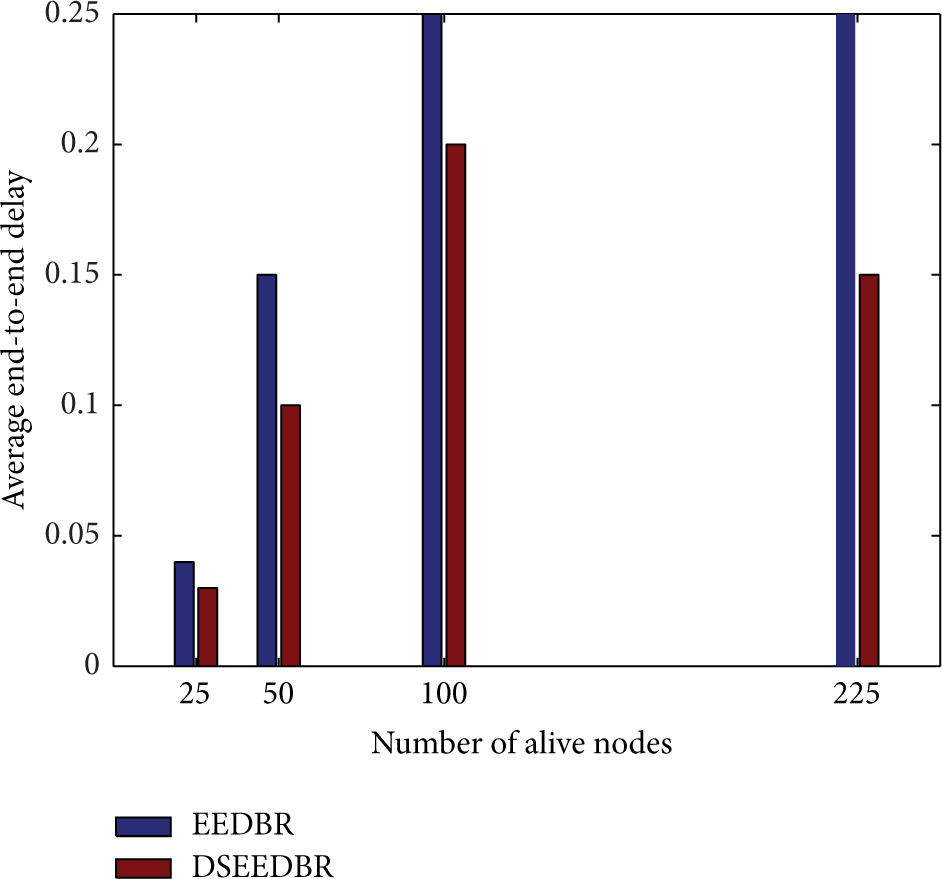
Comparison of EEDBR and DSEEDBR in terms of delay.
8.2.3. Comparison of AMCTD and DSAMCTD
Figure 18 shows the comparison of end-to-end delay between AMCTD and DSAMCTD. The delay in AMCTD is already less than that of DBR and EEDBR due to the involvement of courier nodes; however, there is a high variation in end-to-end delay of AMCTD which is removed in our proposed scheme by introducing

End-to-End delay in AMCTD and DSAMCTD.
Figure 19 illustrates total energy consumption in the schemes of AMCTD and DSAMCTD. There is a continuous variation in results of AMCTD due to movement of courier nodes. Our scheme maintains energy consumption in entire lifetime by adaptive

Total energy consumption in AMCTD and DSAMCTD.
Figures 18 and 20 clearly show the trade-off between the throughput and end-to-end delay of DSAMCTD. Moreover, AMCTD has much higher throughput in the stability period, however, high variation in energy consumption of sensor nodes. We employed the mobility of courier nodes to achieve minimal delay without increasing network throughput. However, higher network throughput is maintained in the later rounds. According to our computations, DSAMCTD is 56% more efficient than AMCTD in terms of end-to-end delay in the network. Figure 21 shows the comparison of delay in AMCTD and DSAMCTD with the change in number of nodes in the network. It also shows the improved performance of DSAMCTD. It shows the equally efficient performance of priority factors in high, medium, and low network density.
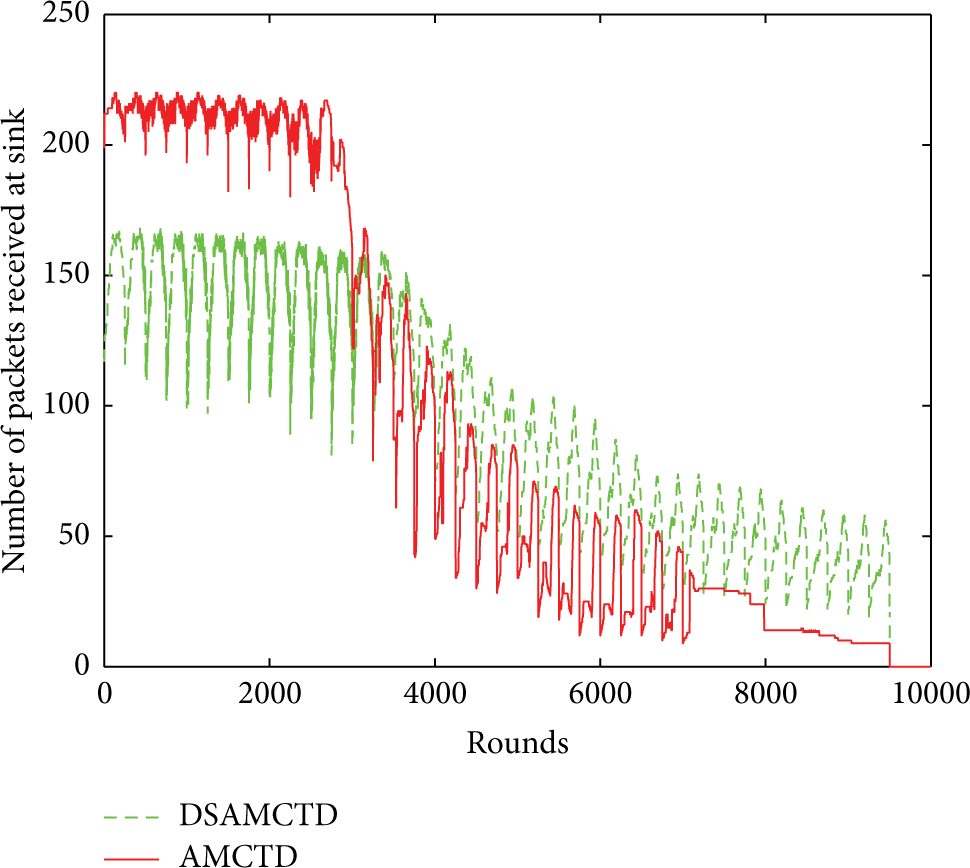
Network throughput in AMCTD and DSAMCTD.

Comparison of AMCTD and DSAMCTD in terms of delay.
9. Conclusion and Future Work
In this paper, we propose delay-sensitive protocols as an improvement to localization-free routing schemes of DBR, EEDBR, and AMCTD. We validate and verify the proposed schemes through extensive simulations in Wireless Sensor Networks (UASNs). In DSDBR, we use
In our future work, we aim to focus on the design of delay sensitive schemes for localization based routing protocols in order to achieve a realistic approach for time-critical applications of UWSNs.
Footnotes
Notations
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Acknowledgments
The authors extend their appreciation to the Research Centre, College of Applied Medical Sciences, and the Deanship of Scientific Research at King Saud University for funding this research.