
Abstract
Localization is one of the most important problems in wireless sensor networks. In this paper, we investigate the convergence rate estimate problem of a distributed localization algorithm which approximately formulates the localization problem as the convex feasibility problem including the consistent case and the inconsistent case. Although existing works established optimal consensus convergence analysis for this algorithm, they did not provide the convergence rate estimate. In this paper, we mainly show that for the consistent case the convergence rate of the optimal consensus will be exponential under some basic conditions, while for the inconsistent case we provide a necessary condition for the optimal consensus and a convergence rate estimate inequality. Furthermore, numerical examples are also provided to validate the established convergence and convergence rate results.
1. Introduction
Wireless sensor networks (WSNs) have attracted considerable research interest from the scientific community and localization is one of the most important problems in WSNs. The objective of localization is to locate the source sensor based on a large number of low-cost sensor nodes with limited computational capacities. Recently, some methods have been proposed in the literature for localization in WSNs, for instance, the maximum likelihood estimation [1], nonlinear least squares [2], convex relaxation methods [3], and projection-based methods [4, 5].
In recent years, distributed algorithms also appear to solve the localization problems [6–9]. Compared with distributed algorithms, a main disadvantage of centralized algorithms, for example, the parallel projection approaches in [4, 5], is that they require a fusion center to gather, compute, and process the information received from all the sensor nodes, and then centralized algorithms are prone to a single point of failure. In distributed algorithms, sensor nodes can accomplish the localization task cooperatively by only local information exchange with their closest neighboring sensors over a strongly connected graph.
The authors in [7] proposed a distributed incremental gradient algorithm to solve the nonlinear least squares problem. The authors in [8] proposed a distributed asynchronous algorithm to deal with the maximum likelihood convex relaxation problem. A well-known distributed projection-based algorithm was proposed in [6] to solve the localization problem, where the authors formulated approximately the localization problem as a convex feasibility problem including the consistent case (the intersection of sensors’ sensing sets is nonempty) and inconsistent case (the intersection of sensors’ sensing sets is empty) following detailed convergence analysis. Recently, the authors in [9] also proposed a similar projection-based distributed algorithm to solve the localization problem, where the authors formulated the localization problem as a ring intersection problem instead of the ball intersection problem given in [6].
In this paper, we will consider the convergence rate estimate problem of the distributed localization algorithm proposed in [6]. Although the authors in [6] provided the detailed convergence analysis, they did not give the convergence rate estimate. To be specific, we will show that, for the consistent case, the convergence rate of the distributed localization algorithm in [6] is exponential under some basic conditions. For the inconsistent case, we will show that generally diminishing projection stepsize is necessary to guarantee the optimal consensus for the inconsistent case. Moreover, we also provide a convergence rate estimate inequality for the inconsistent case.
In fact, the optimal convergence problem for the consistent case is equivalent to convex intersection problem (CIP) that aims to find a point in the nonempty intersection set of many closed convex sets. Distributed algorithms have been proposed to solve CIP in the literature [10–14]. The authors in [10] proposed a distributed projected consensus algorithm to solve CIP with detailed optimal consensus convergence analysis. The authors also showed that the convergence rate of the optimal consensus is exponential for the special case of completely connected network graphs with the same weight. The authors in [14] proposed an approximate projected consensus algorithm to solve CIP in the presence of projection uncertainties described by approximate angles and projection accuracy, where the authors claimed that the convergence rate of optimal consensus for the special case with exact projection (or, equivalently, the projected consensus algorithm in [10]) is not possible to be exponential if the intersection of convex sets has no interior, and the convergence rate estimate problem is still open for general directed graphs. Moreover, to the best of our knowledge, there are also very few results about the convergence rate estimate for the inconsistent case.
Motivated by the claim in [14], in this paper we will consider the convergence rate estimate problem of the distributed localization algorithm proposed in [6] (or, equivalently, the distributed approximate projected algorithm in [14] with zero approximate angle) for general directed graphs. The studied algorithm is a generalization of the algorithm in [10] with a projection stepsize, where, before processing the estimates received from their neighboring sensors, sensors first take a weighted average of their current estimates and the projections onto their individual sensing sets (balls) with the projection stepsize as the weighting factor. The main contribution of this paper is summarized as follows: For the consistent case, we show that, under the conditions of strongly connected interaction graph, nonempty interior assumption of the intersection of sensors’ sensing sets, and sufficiently small constant projection stepsize, the convergence rate of the optimal consensus for the consistent case is exponential. According to the claim in [14], the required exponential convergence rate conditions are basic. To the best of our knowledge, this is the first theoretical result on the convergence rate estimate for general directed graphs. For the inconsistent case, we show that, for the optimal consensus convergence, generally it is necessary that the projection stepsize needs to diminish. Moreover, we also present a convergence rate estimate inequality in the presence of the constant projection stepsize, which reveals that, for any specified tolerable convergence error, we can select sufficiently small projection stepsize such that the convergence error between sensors’ estimates and the optimal point falls within the given tolerable error with an exponential rate.
The rest of the paper is organized as follows. Section 2 shows some preliminary knowledge about graph theory and convex analysis and introduces the source localization problem. Section 3 formulates the convergence rate estimate problem. Section 4 presents the exponential convergence rate result for the consistent case, while Section 5 presents that for the inconsistent case. Finally, the conclusion is provided in Section 6.
Notations.
2. Preliminaries
In this section, we first present preliminaries about graph theory, convex analysis, and then a localization problem in wireless sensor networks.
2.1. Preliminaries
The interaction among the sensors in the wireless sensor network can be conveniently described by a directed graph
We introduce the following properties for convex projection operator
Lemma 1 (see [10, 15, 16]).
Let K be a closed convex set in
Here (i) is Example 3.16 in [16], (ii) is the standard nonexpansiveness property of convex projection operator, (iii) takes from Exercise 1.2 (c) on page 23 in [15], and (iv) is borrowed from Lemma 1 (b) in [10]. From (ii) we know that
The following lemma can be found in [17].
Lemma 2.
Let K be a closed convex set in

2.2. Localization in Wireless Sensor Networks
The objective of localization is to determine the location of an active source in a sensor network. Let the unknown coordinate pair of the active source be

By solving the following least squares problem with Gaussian noise, we can obtain the maximum likelihood estimator

Due to the nonconvexity of rings


In this paper, we term the case
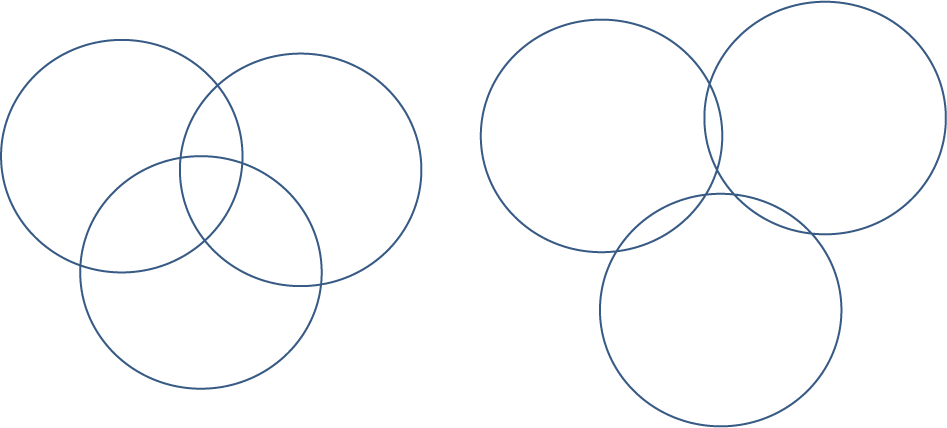
The consistent case and inconsistent case.
3. Problem Formulation
In this section, we first introduce the distributed localization algorithm given in [6] and then the convergence rate estimate problem for this algorithm.
3.1. Distributed Localization Algorithms
We first present a distributed localization algorithm that was introduced in [6]. Consider a sensor network consisting of N sensor nodes with node set
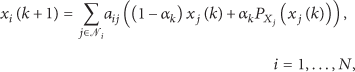
In this paper, we consider the following distributed localization algorithm:
Remark 3.
The distributed localization algorithm introduced in [6] takes the following form:

Remark 4.
The source localization problem for the consistent case is equivalent to CIP that aims to find a point in the intersection
We next make two assumptions on the adjacency matrix A and the interaction graph
Assumption 5.
(i) The adjacency matrix A is stochastic; that is,
(ii) The adjacency matrix A is doubly stochastic; that is,
Assumption 6.
The interaction graph
Here we introduce an optimal consensus convergence result of Algorithm (7), where the first one for consistent case can be obtained from Theorem 4.1 in [14] or Theorem 1 in [6], while the second one for inconsistent case can be found from Proposition 4 in [10].
Proposition 7 (optimal consensus convergence).
Consider distributed localization algorithm (7). For the consistent and inconsistent cases, one has the following: Consistent case: Inconsistent case:
3.2. Convergence Rate Estimate Problem
Although the optimal consensus convergence has been established for distributed localization algorithm (7), the convergence rate results are still few in the literature. The authors in [10] showed that the convergence of optimal consensus of their projected consensus algorithm (or, equivalently, Algorithm (7) with
Here we formally introduce the nonempty interior assumption.
Assumption 8.
When
Note that the optimal consensus result for consistent case does not require Assumption 8. In this paper, we will show that, under the additional condition of Assumption 8, the optimal consensus of Algorithm (7) for the consistent case will be exponential when the constant projection stepsize

4. Consistent Case
In this subsection, we present the convergence rate result of Algorithm (7) for the consistent case
Lemma 9.
Let K be a closed convex set in

Here is the exponential convergence rate result for consistent case. Its proof is given in the Appendix.
Theorem 10 (exponential convergence rate for consistent case).
Consider distributed localization algorithm (7). Suppose
If the interaction graph is fixed and completely connected with the same weight


A completely connected graph with four nodes.
Corollary 11.
If the graph
Example 12.
Here we give an example to validate the convergence and convergence rate results of Algorithm (7) with the consistent case. Consider a network consisting of four sensors with node set
We consider the following three classes of interaction graphs: chains, cycles, and stars with respective adjacency matrices

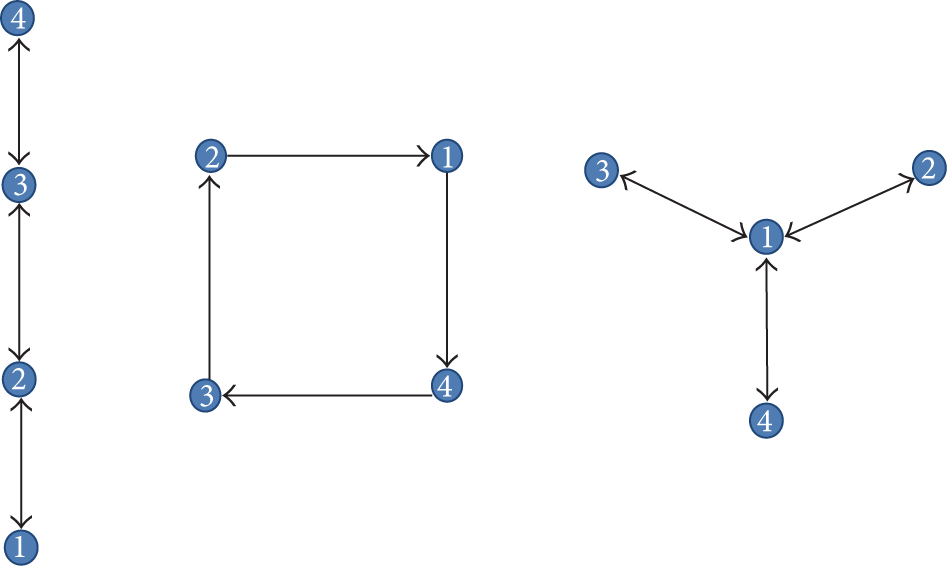
Three classes of interaction graphs: chains, cycles, and stars.
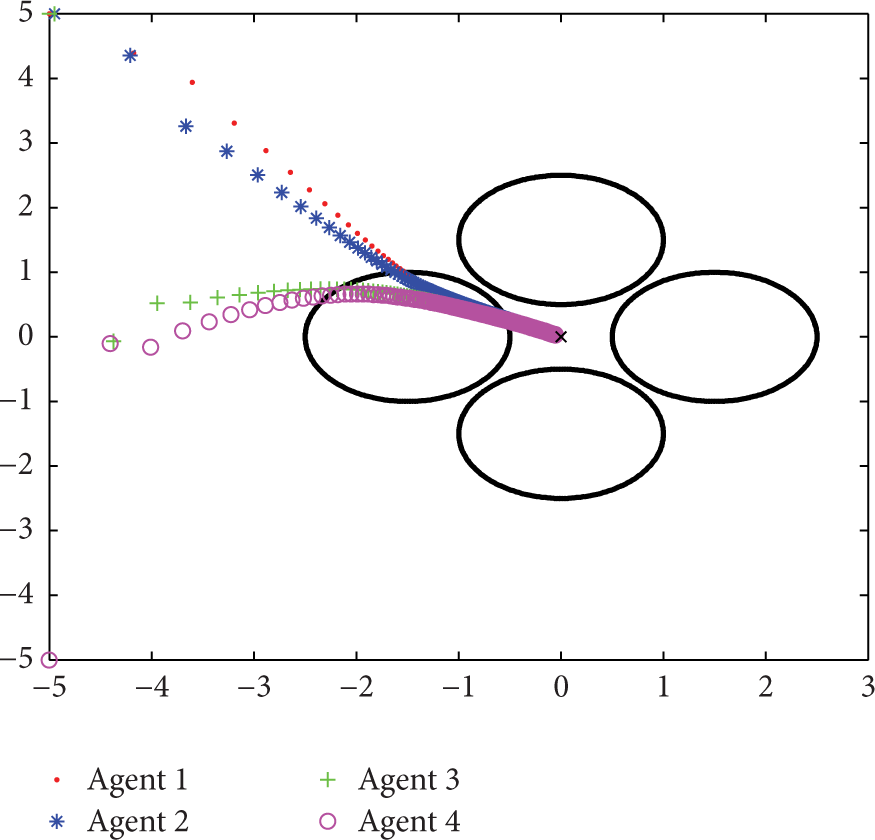
(i) We first present the state trajectories of the four agents from

The trajectories show that the four agents achieve an optimal consensus.
(ii) Here we present the convergence rate estimate for the above three classes of graphs. It is easy to see the intersection set

Figure 5 roughly shows that the convergence rate of the four agents is exponential. From Figure 5 we can also find that the convergence rate depends on the interaction graph structure and the projection stepsize, as revealed in [14]. Moreover, Figure 5 also roughly shows that the larger projection stepsize will lead to a faster convergence rate. Based on these observations, we conjecture that the convergence rate of the optimal consensus for Algorithm (7) is always exponential for any constant projection stepsize

The exponential convergence rate estimate for graphs: chains, cycles, and stars.
5. Inconsistent Case
In this section, for the inconsistent case
We first provide a lemma with proof provided in the Appendix.
Lemma 13.
Let K be a ball in

Here is the main result for the inconsistent case. Its proof is also given in the Appendix.
Theorem 14.
Consider distributed localization algorithm (7). Suppose
(i) If
(ii) Suppose the graph

Theorem 14 (i) reveals that generally the convergence rate for the inconsistent case is impossible to be exponential. Intuitively, when the projection stepsize
Example 15.
Here we give an example to validate the convergence and convergence rate estimate results of Algorithm (7) with the inconsistent case. We still consider the network in Example 12. Suppose the centers of balls
(i) We first present the convergence of optimal consensus from
(ii) Here we give an example to validate Theorem 14 (i). The interaction graph, adjacency matrix, and the initial condition are the same as those in (i). The projection stepsize is
(iii) We now present an example to validate Theorem 14 (ii). The interaction graph is completely connected with doubly stochastic adjacency matrix

We use the measure
The trajectories show that the four agents converge to the optimal solution

Agents will not converge to the optimal solution
From Figure 8 we can find that a larger projection stepsize α will lead to a faster convergence rate of agents’ estimates falling within the final convergence error. This observation is consistent with the theoretical result of Theorem 14 (ii) (see the established convergence rate

Convergence rate estimate of agents’ estimate falling within the final convergence error.
6. Conclusion
In this paper, convergence rate estimate problem of the optimal consensus for a distributed localization algorithm was investigated. We showed that, under the strong connectedness and nonempty interior assumption, the optimal consensus for the consistent case will be achieved with an exponential convergence rate if the constant projection stepsize is sufficiently small. For the inconsistent case, a necessary condition and a convergence rate estimate for optimal consensus were also provided.
There are many other topics worth investigating and my future work will mainly focus on the following. (1) As pointed out in this paper, I conjecture that the convergence rate for the consistent case is also exponential for any projection stepsize. The strict proof of this conjecture is extremely difficult and is still open in the literature. The main difficulty lies in that, for general directed graphs, the difference dynamics of agents’ estimate and convergence dynamics to the nonempty intersection set are coupled closely together and it is hard to present a more tight estimate for them to obtain a linear iteration equation with an asymptotically stable system matrix. (2) In this paper, I approximately formulate the localization problem as a convex intersection problem of some balls. However, it is more practical to formulate the localization problem using rings instead of balls. So it is certainly very interesting to extend the current convergence rate results to the more general distributed ring intersection setting.
Footnotes
Appendices
Conflict of Interests
The author declares that there is no conflict of interests regarding the publication of this paper.
Acknowledgments
The author thanks the reviewers for their valuable comments on this paper. This work was supported by a grant from the Institute of Finance, Industrial and Commercial Bank of China.