
Abstract
Network architecture analysis is a curial issue for a large scale Machine-To-Machine (M2M) network. Considering an M2M backbone network which consists of distributed satellite clusters in geosynchronous orbit (GEO), a new distributed satellite cluster network (DSCN) hybrid topology architecture is proposed in this paper. To the best of the authors' knowledge, the conceptions of domains, strong/weak link, hubs, small world, and degree realizability are proposed for the first time in the DSCN based M2M backbone networks. How these features affect the network is given through analysis and simulation. By employing Network Science Theory, a strong constraint DSCN topology is presented. In addition, we compare the DSCN with several typical network topologies. Results show that the proposed hybrid architecture realizes a stunning trade-off between the efficiency and robustness.
1. Introduction
Wireless M2M networks supporting M2M-enabled machine devices are pivotal to the success of M2M. Sensor nodes in wireless M2M networks could be connected by a wide range of wireless network technologies, for example, satellite networks, especially the latest space information networks (SINs). With the developing of satellite transmission technologies, the SIN has been playing a more important role in the M2M backbone network than ever. As one of the trends in the future satellite networks, distributed satellite cluster network (DSCN) recently has drawn more and more attention. Many distributed satellite clusters (DSCs) have been deployed by some demonstrations, such as F6 (Future, Fast, Flexible, Fractionated, Free-Flying) Program, Techsat-21, and 3CSat (Three-Corner Satellite) [1–3]. DSC refers to a number of satellites that distribute on the same or adjacent orbit position. The satellites in one or adjacent DSCs cooperate to achieve a particular mission and intercommunicate with each other through intersatellite links. In general, DSC is also referred to as payload distributed communication satellite system (DCSS), distributed space system (DSS), and fractionated spacecraft clusters (FSCs) [4].
With respect to flexibility and robustness, satellites with traditional configurations, that is, monolithic satellites, are associated with more uncertainty than DSCs. The flexibility and robustness for monolithic satellites can only be improved with novel operations. If a monolithic satellite fails, the feasible method to continue the missions carried on the defunct satellite would be launching a new satellite.
The problems that the monolithic satellite has to face mainly include the following:
The increasing transmission requirement of M2M terminals leads to a speedy increasing of payload, which is impossible to be met by a single monolithic satellite platform. The orbital slots are limited, especially for GEO. The building, deploying, and serving period is too long, such as 15 years, which means that the latest technology cannot be applied in time. Increasing complexity of system leads to threats of electromagnetic coupling and movement coupling. The risks of manufacturing and launching also increase; meanwhile, the robustness of the M2M backbone network gets worse.
Since the satellite nodes in DSC are separated physically, DSC is a novel concept that not only provides the ability to repair, replace, upgrade, and add modules at a low cost without experiencing the service blackout, but also mitigates the vulnerability to debris and external interference. The above problems which arose among monolithic satellites can also be eliminated in DSCs.
In previous work regarding DSCs, the 802.11s protocol was introduced to the F6 Program by Michel et al. in [5]. It had shown that multiradio mesh extension provided by 802.11s yields a robust and scalable mesh network, which is suitable for cluster of low earth orbit (LEO) satellites. Yaglioglu proposed a DSC architecture for earth observation missions in [6]. The sizing of the modules within Yaglioglu's architecture was made based on an incremental launch or one module per launch, approach. However, the intersatellite links were not considered. In [7], Orndorff et al. discussed the DSCN architecture for responsive space. A satellite architecture consisting of multiple DSCs in GEO was proposed. The architecture provided standard communications and propulsion services to client satellites flying within the clusters. However, only the star topology was built and analyzed, which could not meet the M2M transmission requirements. More information about DSCN can be found in [8–15].
As shown above, none of previous work provided an efficient solution to design and analysis of DSCN, especially for M2M networks. In this paper, we propose a novel M2M backbone network architecture. The main contributions of our paper are summarized as follows:
A new DSCN hybrid topology is proposed. The architecture, which consists of DSCs in GEO, is designed for the backbone transmission of the M2M network. The conceptions of domains, strong/weak link, hubs, small world, and degree realizability are introduced to DSCN. How these features affect the network is investigated by logical derivation and Monte Carlo simulation. The performance of the proposed DSCN architecture is analyzed in the metrics of standard deviation of degree, natural connectivity, and network efficiency. It can be found that the proposed DSCN hybrid topology outperforms typical topologies significantly.
2. Network Features Analysis on DSCN
In this section, we introduce a typical M2M backbone network based on DSCN and investigate the typical DSC topologies.
2.1. Distributed Satellite Cluster Network
The existing studies show that the vehicles in DSCs can use 2.4 GHz Wi-Fi and 802.11s [16]. However, intersatellite laser links, whose transmission rate ≻10 Gbps, can highly improve the transmission capability among vehicles in DSCs [17]. Normally, the distance between two vehicles varies from 10 km to 100 km. In the case of formation flying, the satellites need to be controlled precisely to keep a specific configuration. However, DSC flying does not require a strict relative position control as long as collision avoidance is ensured [18, 19].
Figure 1 demonstrates a typical M2M backbone network which consists of three DSCs in geostationary satellite orbit. The communication links between user nodes and DSCs are located at microwave band, and the communication link among DSCs or in DSC is laser link. The distance between DSCs is about 9 × 104 km to achieve a worldwide coverage. The M2M-enabled devices of the DSCN include deep space spacecrafts, space-based vehicles, air-based aircrafts, ground-based sensors, and sea-based ships. The service information includes data, voice, image, video, and remote sensing data.
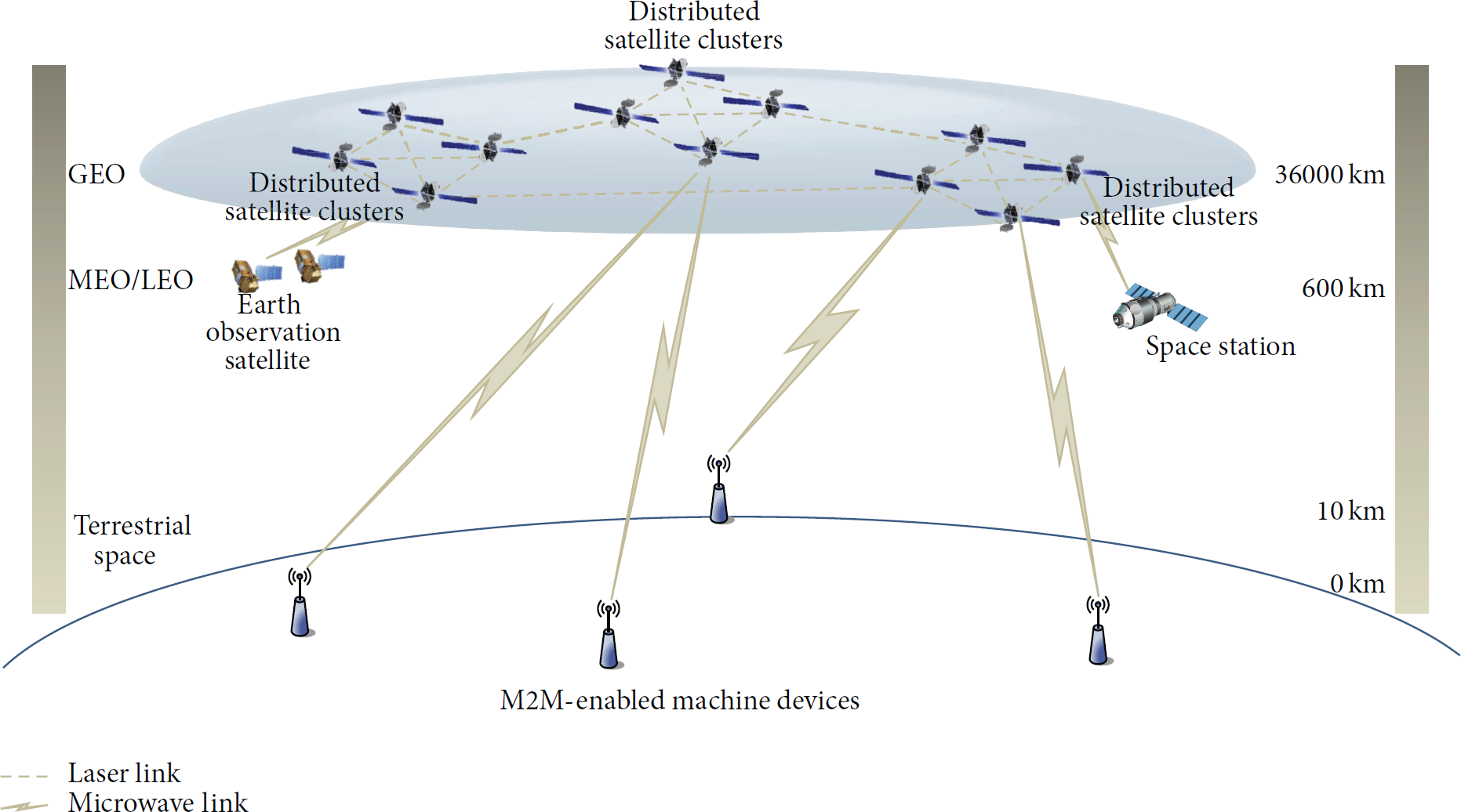
M2M backbone network.
2.2. Typical Topologies Analysis
The typical DSC topologies include line, ring, star, and mesh, as shown in Figure 2.
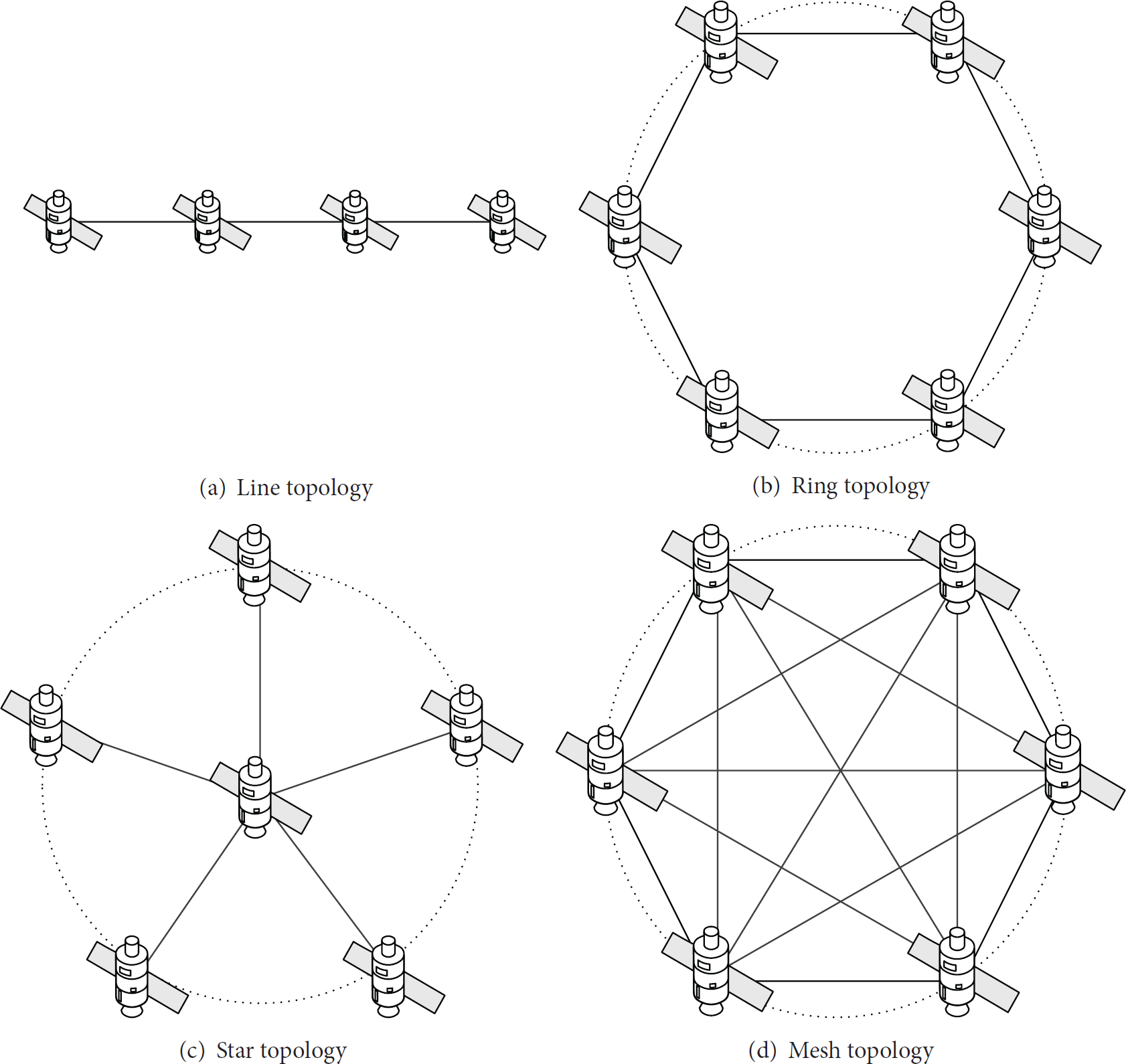
Typical topologies of DSCs.
2.2.1. Line Topology
Line topology can be modeled as


Since the satellite in line topology is easy to adjust attitude and the topology has no central node, line topology DSCs are easy to operate and simple to maintain. However, the disadvantage of line topology is that each node only links with its neighbor. The average path length (APL)

2.2.2. Ring Topology
Ring topology can be modeled as


For a ring topology, the data will transmit in two directions through the network. Each node has two neighbors, one of which is receiving end and the other is transmitting end. The advantage of ring topology is that it can achieve better robustness than line topology, since each node is at an equal position in the network. If one node breaks down, the ring can avoid connecting it and forming a new ring network immediately. However, since ring topology has no central node, it is hard to operate and maintain the network. Moreover, the information will be relayed in a multihop link when the network size expands, which will result in low information transmission efficiency and large time delay. The

2.2.3. Star Topology
Star topology can be modeled as


The star topology is a master-slave structure, in which the center satellite plays a role of hub and others surround the hub as clients. Each client node links and communicates with the master node. Any communications among the client nodes must pass through the master node. The star topology is widely used in satellite communication because of its high efficiency and flexibility. The advantage of star topology DSC is that the

2.2.4. Mesh Topology
Mesh topology can be modeled as


Mesh topology is a kind of k-rule graph, also known as fully connected topology. In the mesh DSC, there exists link between every pair of nodes. This topology has the maximum number of links; that is,

The advantage of mesh topology is its robustness, due to the fact that each node is equal to each other in the network and there is no center node. If one node breaks down, it has almost no effect on network performance. Each pair of vehicles is allowed to communicate directly, so the information is transferred in time and without relay.
As shown in Table 1, we sum up the characteristics of typical topologies. The APL is
Characteristics of typical topologies.

It is worth pointing out that the previous four typical topologies are widely used in DSCs for a single-task purpose, such as F6, SBG, and Techsat-21. They are the foundation of DSCN for multitask, which will be discussed in this paper.
2.3. The Challenges of DSCN Topology Design
Highly efficient and strongly reliable networking technologies reduce the failure risk of DSCN. However, there are some tough challenges in the design of DSCN topology, which should be carefully considered.
The relative movement of satellites may lead to link failure, which has negative effect on the DSC topology. For example, Techsat-21, whose formation is made up by three identical satellites in LEO near circular orbit, flies in various configurations with relative distance ranges from 100 m to 5 km [14]. The constellation of Techsat-21 cannot keep relatively fixed topology. Perturbation and orbit transfer insertion error make orbital drift between the actual position of satellite and designed orbit. The relative position variation of satellites is quite intense and uncertain. The reconfiguration of DSC for a specific task and satellite node failure may also lead to network topology changing.
The DSCN architecture is complex. It is hard to take all factors into consideration when designing a large-scale DSCN architecture. However, the performance of DSCN is affected by its network structure in nature.
Unlike traditional internet or wireless sensor network, the typical topologies above cannot meet the challenges of DSCN. In this paper, we focus on links of DSCN and propose a DSCN hybrid topology in the next section. The proposed architecture has the advantages of high connectivity, short APL, and homogeneous degree distribution, which is practical for satellite vehicles.
3. DSCN Topology Design
DSCN topology design is a complicated issue including many uncertain factors such as technology, requirement, and policy. In this section, we introduce Network Science Theory [22] into DSCN architecture design and try to take the factors above into account as many as we can.
The DSCN topology can be modeled as

In the rest of this section, three performance metrics of network will be introduced and used to evaluate the DSCN performance.
3.1. Standard Deviation of Degree
Standard deviation of degree σ is a quantitative measure of DSCN's heterogeneous characteristic [23]:

3.2. Natural Connectivity
Natural connectivity 
Since 
3.3. Network Efficiency
Network efficiency ε has been mentioned in Table 1. The network efficiency tries to quantitatively depict the information transmission performance of DSCN, which is a key metric of DSCN topology design progress.
The high DSCN topology efficiency means that the network has the shortest APL for users' information transmission. Thus, the important factor to determine the efficiency should be the APL in (17), where 
However, if there exist isolated nodes in the network, 
4. Demonstration and Analysis
In this section, we take a DSCN as an example, which has the characteristics of domains, strong/weak links, hubs, small worlds, degree realizability, multitask, self-organization, and so forth, as shown in Figure 3. These simulations were carried out using the NS2 simulator. All of the simulations were run 100 times and the average was given. The three DSCs in GEO are networking together to achieve a global seamless coverage.

The three DSCs in GEO are networking together to achieve a global seamless coverage.
Each DSC is referred to as a domain. In each domain, the satellite nodes connect together through dense intersatellite laser links, which is referred to as strong links in the following, and are denoted by “1” in Figure 3. The DSCN can be composed of line topology, ring topology, star topology, mesh topology, or even other atypical topologies depending on mission requirements. Since the distances between DSCs are far (c. 8.83 × 104 km), the inter-DSC links need high power laser and are difficult to realize in applications. Instead, the point-to-multipoint intersatellite laser communication can be used by enlarging the beam divergence angle [26], for example,
Assuming that the satellite nodes are static in a short time, the DSCN in Figure 3 can be represented by


Since the dynamic change of nodes in GEO DSCs is not considered, we set
4.1. Domain
The domain refers to features that the nodes in DSC have high information-interaction frequency, high transmission capacity, and low time delay. The satellite nodes are in tightly coupled relationship and have a reliable connectivity. The advantages of domain are the fact that the network is modularized and P&P (plug and play). During the construction of DSCN, the gradual development and flexible networking can be implemented. During the network development stage, the change of each domain impacts little on the others. Thus, each DSC can evolve independently.
4.2. Strong/Weak Links
Since the transmission delay in the domain is low and the connectivity is reliable, intersatellite links in DSC are defined as strong links. If we connect all the DSCs pair wisely as mesh, there will be too many strong links to realize. The current technique does not allow so many intersatellite laser links, especially for the antenna-limited satellites. For inter-DSC links, the transmission delay is long and the connectivity is poor. Thus, the links between domains are defined as weak links [27] in DSCN.
Since the weak link is the shortcut to connect two domains faraway, the weak links are the key connection of the DSCN, which is more important than strong links. The weak link determines network efficiency ε fundamentally. When the weak link fails, ε will decrease remarkably, as shown in Figure 4. Actually, due to the existence of weak links, the path length of nodes in DSCN is greatly reduced. The information just needs less hop number to arrive at the sink nodes. This feature is referred to as the small world effect in this paper. In our demonstration, Algorithm 1 is proposed to evaluate the affect difference between strong/weak links.

Strong/weak link failures effect on ε.
It can be found in Figure 4 that ε will decrease remarkably when the weak link fails. We can conclude that the weak links are the key connections of the net, which are more important than strong links.
4.3. Hubs and Small World
The hub is the node with strong processing ability and large number of links, especially weak links. In traditional satellite network, one satellite nodes cannot afford so many links due to limited factors, such as antennas, power, and satellite payload. However, the number of inter-DSC links is much larger than that of conventional satellite system using laser links, since the DSC can establish many links based on its distributed antennas. Moreover, the DSC also has the strong processing ability based on its distributed pool of processor and storage. The DSCs can be treated as the hub of the DSCN.
Small world means that although the DSCN has many nodes and the distance is rather long, the information just needs a few hops to reach the sinks. There could be no direct link between one node and most of the rest nodes, but the existence of hubs builds a small word. The existence of weak link and small world avoids the disintegration of DSCN.
4.4. Degree Realizability
Comparing with World Wide Web (WWW) which is typically scale-free with power law
Sequences of Degree Distribution. The degree is the number of links for one node. For DSCN, we use (21) to represent the degree of 


Sequences of degree distribution of typical topologies.
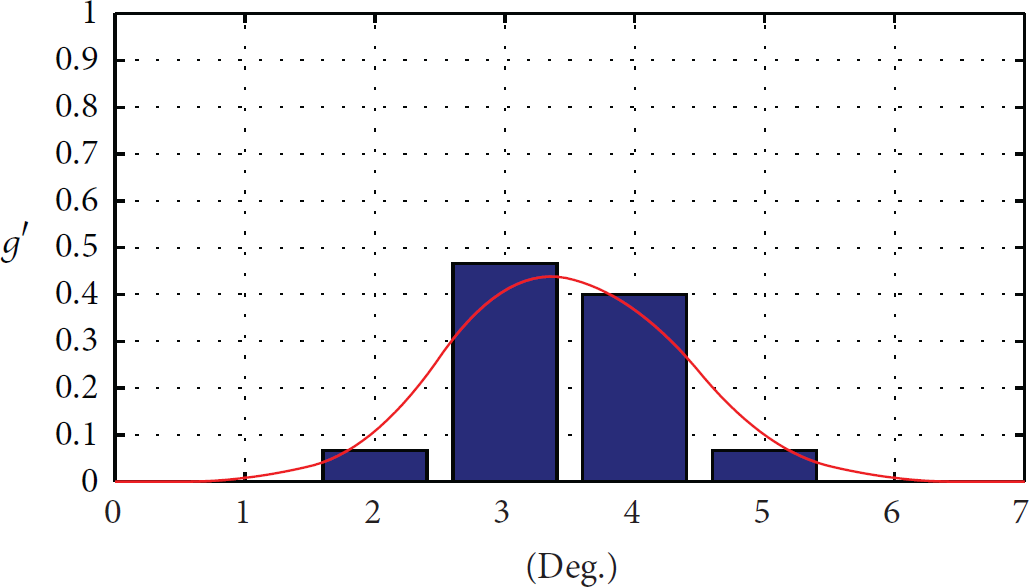
Sequences of degree distribution of DSCN.
Algorithm 1.
Strong/weak link failures effect on ε.
Step 1. Initialize algorithm; compute the shortest paths of whole satellite clusters network
Step 2. 
Step 3. 
Figure 5(a) is
4.5. Multitask and Self-Organization
Since the DSCN is a space based comprehensive M2M backbone network, the ability of DSCN shall meet the multitask requirements for all kinds of M2M terminals. The proposed architecture of the DSCN consists of domains, which allow each domain to work relatively independently and cooperatively at the same time, that is, multitask ability. For many distributed satellite missions, the system is single-task at one moment.
Similar to the intelligent mobile nodes in ad hoc networks, the satellites in DSCN can be self-organized when the mission is changed. If one node is damaged, other nodes will reject this node and reconfigure intelligently to maintain the original functions.
4.6. Performance Comparison
The standard deviation of degree σ, natural connectivity
Performance comparison of network parameters (

As shown in Table 2, the DSCN hybrid topology designed has the low
5. Conclusion
A DSCN hybrid topology has been studied under the Network Science Theory. It has been proved that the weak link is the shortcut to connect two domains faraway. Moreover, the homogeneous degree of DSCN means that the architecture can be practically realized. Performance comparison has been given to demonstrate the superiority of the proposed topology. Results show that the hybrid topology can achieve a good trade-off between the efficiency and invulnerability performance comparing with the conventional topologies.
Footnotes
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Acknowledgments
This work is supported by National Natural Science Foundation of China (61231011, 61032004, and 91338201) and National High Technology Research and Development Program of China (863 Program) (2012AA121605). The authors thank Dr. Gengxin Zhang, professor of Institute of Communications Engineering, PLA University of Science and Technology, for his beneficial suggestions and promising instruction on satellite network performance analysis. They are grateful to Dr. Shiwei Tian, Dr. Xiaohan Yu, and Dr. Min Li for generously sharing information about distributed satellite cluster.