
Abstract
With the development of wireless communication and sensor techniques, source localization based on sensor network is getting more attention. However, fewer works investigate the multiple source localization for binary sensor network. In this paper, a self-adaptive particle swarm optimization based multiple source localization method is proposed. A detection model based on Neyman-Pearson criterion is introduced. Then the maximum likelihood estimator is employed to establish the objective function which is used to estimate the location of sources. Therefore, the multiple-source localization problem is transformed into optimization problem. In order to improve the ability of global search of particle swarm optimization, the self-adaptive particle swarm optimization is used to solve this problem. Various simulations have been conducted, and the results show that the proposed method owns higher localization accuracy in comparison with other methods.
1. Introduction
With the advances of wireless communications, sensor techniques, and microelectromechanical system (MEMS), wireless sensor network has attracted more and more attention and research in recent years. A wireless sensor network consists of hundreds of low-power, low-cost sensor nodes having sensing, data processing, and communication abilities in an unattended environment [1]. The main task of sensor node is to sense the physical environment and transmit it to the base station through the multihop communications. Since the measurement accuracy of single sensor node is very low, the base station needs many measurements to improve the accuracy. So the redundant information is very important for wireless sensor network. Targets localization is one of the most important techniques in wireless sensor network since it has many potential applications such as vehicles tracking, animal activity monitoring, and health surveillance areas. The traditional sensor node transmits the measured data to base station; however, it will consume more energy because it needs to transmit great amount of data. The binary sensor node only transmits “1” if the target is detected; otherwise it keeps silence. So it is a low power consumption and bandwidth-efficient solution for target localization in wireless sensor network.
Recently, several methods have been employed to estimate the target location, received signal strength (RSS), time of arrival (TOA), time difference of arrival (TDOA), and angle of arrival (AOA) in wireless sensor network [2]. The angles between unknown node and a number of anchor nodes are used in the AOA method to estimate the location. The AOA method needs the array antenna, so it is a high cost and energy consumption solution for WSN. TDOA method locates target by measuring the signals’ arrival time difference between sensor nodes. TOA method measures travel times of signals between node and target. TOA and TDOA need the high precision clock. And the clock error can significantly affect localization error. RSS method is an inexpensive approach since it does not need high accuracy. Using a theoretical or experimental model, the received signal strength is transformed to an estimated distance between the node and target [3]. In this paper, we investigate the multiple targets localization based on RSS method.
In this paper, we propose a self-adaptive particle swarm optimization based multiple source localization method (SAPSO-MSL). We employ the maximum likelihood (ML) method to establish the localization objective function. The regular maximum likelihood method is cumbersome, implying tremendous efforts for solving the ML method in multiple targets localization problems. The challenge is to find a solution which is easy to implement and meanwhile capable of approximating the ML method with rather low computational complexity [4]. Therefore, we proposed a self-adaptive particle swarm optimization (SAPSO) method to solve this problem.
The main contribution of this paper is given as follows.
We convert the multiple source localization problem into the optimization problem though the maximum likelihood method. The self-adaptive particle swarm optimization which owns low computational complexity is used to estimate the location of source.
The remaining parts of this paper are organized as follows. In Section 2, we describe the related works in recent years. The signal model and detection model are introduced in Section 3. In Section 4, the proposed multiple source localization method is explained. Simulation and numerical results are presented in Section 5. Section 6 concludes the paper.
2. Related Works
The source localization approaches can broadly be divided into two categories: single source localization and multiple source localization.
Many researchers have proposed several methods to solve the single source localization problem. In [5], a new incremental optimization algorithm called normalized incremental subgradient algorithm is proposed. This algorithm could solve the energy based distributed sensor network source localization problem where the decay factor of the energy decay model is unknown. Several different algorithms (least squares algorithm, unconstrained least squares calibration algorithm, constrained least squares calibration algorithm, and weighted least square algorithm) [6] are proposed for the acoustic energy based localization when the beacon positions are uncertain. The proposed algorithms do not require iteration or initialization. In [7], a fully distributed localization algorithm is investigated. This algorithm is scalable for use in large sensor networks. For this algorithm, the scalability is achieved by forming sensor nodes into groups which collaborate to locate sources. Since the objective function of single source localization method has multiple local optima and saddle points [8], the authors formulate the problem as a convex feasibility problem and propose a distributed version of the projection onto convex sets method. A hybrid particle swarm optimization (PSO) and sequential number-theoretic optimization (SNTO) algorithm [9] are proposed for acoustic source localization in sensor networks. The SNTO provides a rigid method for PSO to initialize its particles while the virtual force-based heuristic method can direct the particles to the optimal solution.
Multiple sources localization for sensor network has been drawing a lot of research interest recently. A maximum likelihood estimation method [10] is used for the multiple source localization. And a multiresolution search algorithm and an expectation-maximization (EM) like iterative algorithm are proposed to expedite the computation of source locations. An efficient expectation maximization algorithm [11] is proposed to improve the estimation accuracy and to avoid being trapped into local optima through the effective sequential dominant-source initialization and incremental search schemes. In [12], a novel expectation-maximization (EM) based multiple source localization scheme is proposed in the presence of nonuniform noise variance. This algorithm is much more computationally efficient and robust than the existing stepwise-concentrated maximum-likelihood and approximately concentrated maximum-likelihood algorithms. An alternating projection approach [13] is proposed to solve the problem of localizing multiple sources using energy measurements from distributed sensors. This approach decomposes the multiple sources localization problem into a number of simpler optimization problems. It exhibits lower computational complexity as compared to the maximum likelihood estimator. In [14], two additional constraints are proposed to improve the localization accuracy after the initial location estimates are obtained from some existing localization algorithm. The additional constraints are an assumption of consistency of relative locations within a group of targets.
The above methods focus on the energy measurement based source localization; that is, the sensor node should transmit the measurement to the fusion center. Therefore, large amounts of data need to transmit in the network. For the large scale sensor network, it would likely overload the internodes communication network and create an excessively large computational burden to the large amount of measurement data. The binary sensor only detects the presence of a target or not; that is, it may transmit if it has detected a source or it may not transmit anything. Therefore, the binary sensor is a low-power and bandwidth-efficient solution for wireless sensor network since they communicate only a single bit of information.
Most of the existing works focus on the single source localization in binary sensor network. The authors propose a maximum likelihood source localization method in [15]. A subtract on negative add on positive (SNAP) algorithm [16] which is a simple, efficient, and fault-tolerant algorithm is proposed. This algorithm can be applied in time-critical applications for estimating the position of source for binary sensor node. It is slightly less accurate but computationally less demanding in comparison with maximum likelihood estimation. In [17], a real-time approximated maximum likelihood estimator is developed to reduce the computational complexity of the maximum likelihood estimator. A spatial topology of binary sensor network based source localization and tracking method [18] is proposed. This method employs an efficient wake-up strategy to activate a particular group of sensors for cooperative localization. To the best of our knowledge, only a few papers investigate the multiple source localization in binary sensor network. A trust index based subtract on negative add on positive (TISNAP) method [19] is developed for multiple source localization in binary sensor network. However, this method assumes that the distance between two sources is far enough initially; that is, the node is influenced by only one source initially. So the localization process is similar to the single source localization process. In our previous work [20], the fuzzy C-means and likelihood matrix are used to estimate the localization of sources. This is a lightweight solution for multiple source localization in binary sensor network. However, the accuracy of this method is low. So we develop a high accuracy localization method further.
3. System Model
In this section, we firstly introduce the signal propagation model for acoustic source, and then the detection model for binary sensor node is presented.
3.1. Signal Model
We make the following assumptions in the study. There are N acoustic sensor nodes and K acoustic sources in the field. Each sensor node is equipped with an acoustic energy measuring sensor. Each source emits acoustic signal that attenuates inside the area under observation. The intensity of an acoustic signal is emitted omnidirectionally from a point sound source. The received energy (signal strength) for ith sensor node at time t is given by [10]

During the time interval
In this paper, we assume that the acoustic intensity and energy emitted from each source do not vary too much during the time interval and thus we neglect the propagation delay in this paper. A concise acoustic energy decay model can be expressed as

3.2. Detection Model for Binary Sensor Node
The detection model is very important for binary sensor network. It reflects the physical characteristics of the sensor. One of the most commonly used models is the binary detection model. The event occurs within the sensing radius of a sensor being detected with probability 1 while an event outside this circle of influence is not detected with probability 0. So the detection probability of a target by sensor j can be expressed as

The binary model is commonly adopted because of its analytical simplicity, but it is based on unrealistic assumption of perfect coverage for sensors. It cannot reflect the relationship between the signal attenuation and detection probability. The Elfes model is more realistic than binary model. The detection probability of a target i by sensor j is

In this paper, we introduce the Neyman-Pearson (NP) criterion to establish a more realistic detection model. This model incorporates the signal characteristics and false alarm rate. According to the signal propagation model in Section 3.1, the acoustic signal received at ith sensor can be expressed as

The probability density function of
According to the Neyman-Pearson criterion [21, 22],
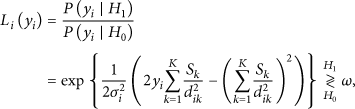
Equation (8) can be rewritten as

The above equation can be expressed as

Therefore, we can obtain that

We set
So the false alarm rate is as follows:

Therefore, the detection probability of the sensor node is


Finally, we can obtain the detection probability as follows:

Figure 1 shows the detection probability of the sensor node in the presence of two sources. The X coordinate depicts the distance between the first source and the sensor node. The X coordinate indicates the distance between the second source and the sensor node. We can see that the detection probability is approximated to 1 when the sensor node is close to the sources. The detection probability will decrease gradually with the distance increase. And it is very low when the sensor node is far from the sources.

The detection probability in the presence of two sources.
Figure 2(a) shows the relationship between the distance and detection probability under different source energy values. We can notice that the detection probability decreases with the distance increase. And the higher the energy values, the higher the detection probability of the sensor node. Figure 2(b) illustrates the detection probability under different false alarm rates. The false alarm rate shows the instability of the hardware.

(a) The detection probability under different source energy values. (b) The detection probability under different false alarm rates.
4. Proposed Multiple Source Localization Method
The source localization can be implemented in both traditional network and binary sensor network. In traditional networks, the measurement is performed between the source and sensor node. This method needs higher hardware requirements and transmits large amounts of data; it will consume relatively more energy. Therefore, this method is not suitable for large-scale applications. With the development of the low cost and low bandwidth binary sensor, the multiple source localization using binary sensor network received more and more attention in recent years.
The running process of the binary sensor network is as follows: the base station knows the location of each binary sensor node in prior. Each sensor node is programmed with a common threshold T. If the measurement
4.1. Maximum Likelihood Estimation
The maximum likelihood estimation (MLE) is one of the most common estimation procedures used in practice. The MLE could obtain high estimation accuracy when the measurement error obeys the identical and independently Gaussian distribution. In this paper, we establish an objective function based on the signal propagation model (6) through the MLE.
The state of sensor node can be defined as follows:

In (6), the unknown parameters are

The log-likelihood function can be expressed as

Therefore, the objective function is formulated as follows:

The multiple source localization problem is transformed into nonlinear optimization problem. The estimated source location can be obtained at base station by maximizing the objective function (19). And the signal energy
4.2. Self-Adaptive Particle Swarm Optimization Based Localization Method
The particle swarm optimization (PSO) is well known because it is efficient, straightforward, and easy to implement. It is a population based stochastic optimization technique, inspired by social behavior of bird flocking or fish schooling. PSO has been successfully applied to solve a broad range of optimization problems. Unfortunately, conventional PSO suffers from the premature convergence problem, especially in complex problems since the interactive information among particles in PSO is too simple to encourage a global search [23]. The traditional PSO method is easy to trap in local optimum. In this paper, we employ the self-adaptive PSO algorithm to improve the ability of global search.
The PSO is initialized with a group of random particles and then searches for optima by updating generations. In this paper, we assume that a swarm consists of P particles


The inertia weight w is used to balance the global and local search abilities of PSO, and it is very important for PSO. The large inertia weight improves global search ability and small inertia weight facilitates local search. So we employ the self-adaptive weight particle swarm optimization to improve the search ability of the PSO. The self-adaptive weight for t iteration is given by

The proposed strategy is shown in Pseudocode 1.
(1) Initialize each particle. (2) While (3) For each particle (4) Calculate fitness value (5) If fitness( (6) If fitness( (7) End (8) For each particle (9) Update the inertia weight according to (22). (10) Calculate particle velocity according (20). (11) Update particle position according (21). (12) End (13) End
Pseudocode 1
5. Simulation and Numerical Results
In this section, simulation results are presented and analyzed. And we compare the proposed SAPSO-MSL method with FCM [24] and FCM-LM [20] methods via computer simulations. We consider a 2-dimensional square region of size 100 m by 100 m, where we randomly deploy N sensor nodes. The default parameter values in the simulation are shown in Table 1. The performance of localization can be measured quantitatively with the following criterion, given by

The default parameter values.

Figure 3 shows the relationship between the threshold T and the localization error. The localization errors of all methods decrease with the increase of the value of T; it is because the larger the value T, the smaller the noise interference. It can be observed that the proposed SAPSO-MSL method outperforms other methods when the value of T is small. Compared with FCM and FCM-LM methods, the localization accuracy improves 35.27% and 33.45%, respectively, when

The threshold T versus localization error.
Figure 4 shows the impact of source energy

The source energy
In Figure 5, we investigate how the standard variance of measurement noise
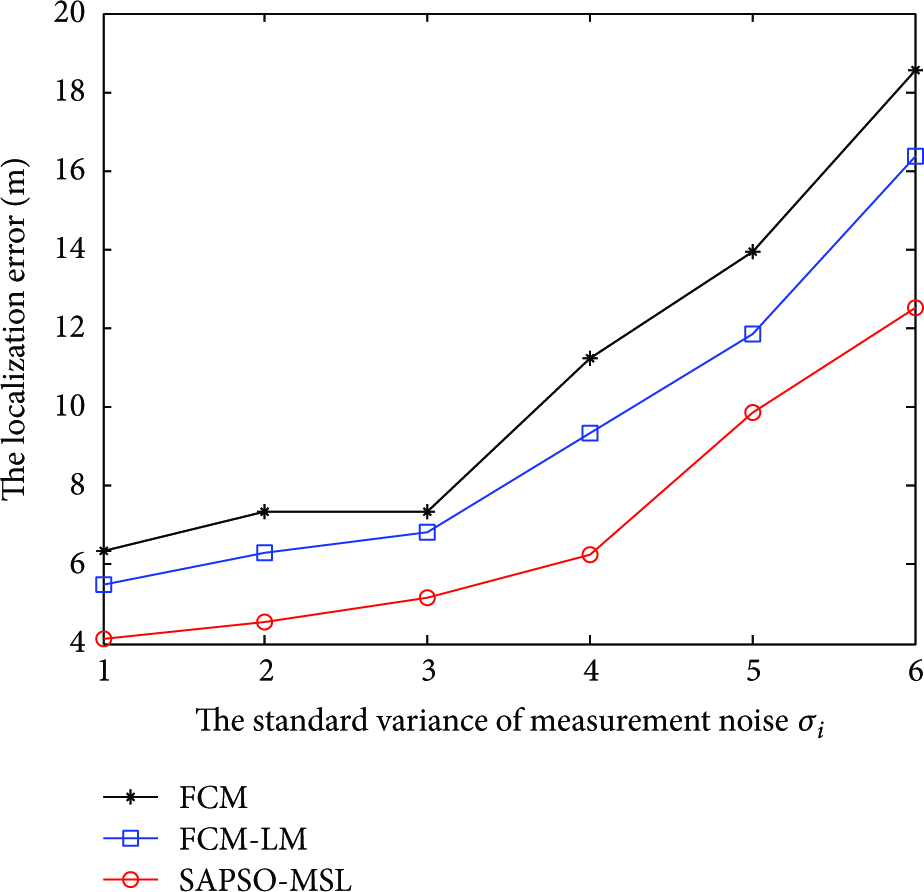
The standard variance of measurement noise versus localization error.
Figure 6 shows the localization error for different number of sensor nodes. It is demonstrated that the SAPSO-MSL method is affected by the number of sensor nodes greatly. When the number of sensor nodes is small, the performance of SAPSO-MSL method is worse than FCM-LM. In most cases, the SAPSO-MSL owns the highest localization accuracy.

The number of sensor nodes versus localization error.
In Figure 7, we investigate the effect of false alarm rate on the localization error. It is noticed that the FCM and FCM-LM methods remain almost stable with increase in false alarm rate. The SAPSO-MSL method is affected by false alarm rate greatly. The proposed method owns the best performance when the false alarm rate is low. However, FCM-LM outperforms the SAPSO-MSL and FCM methods when false alarm rate is larger.
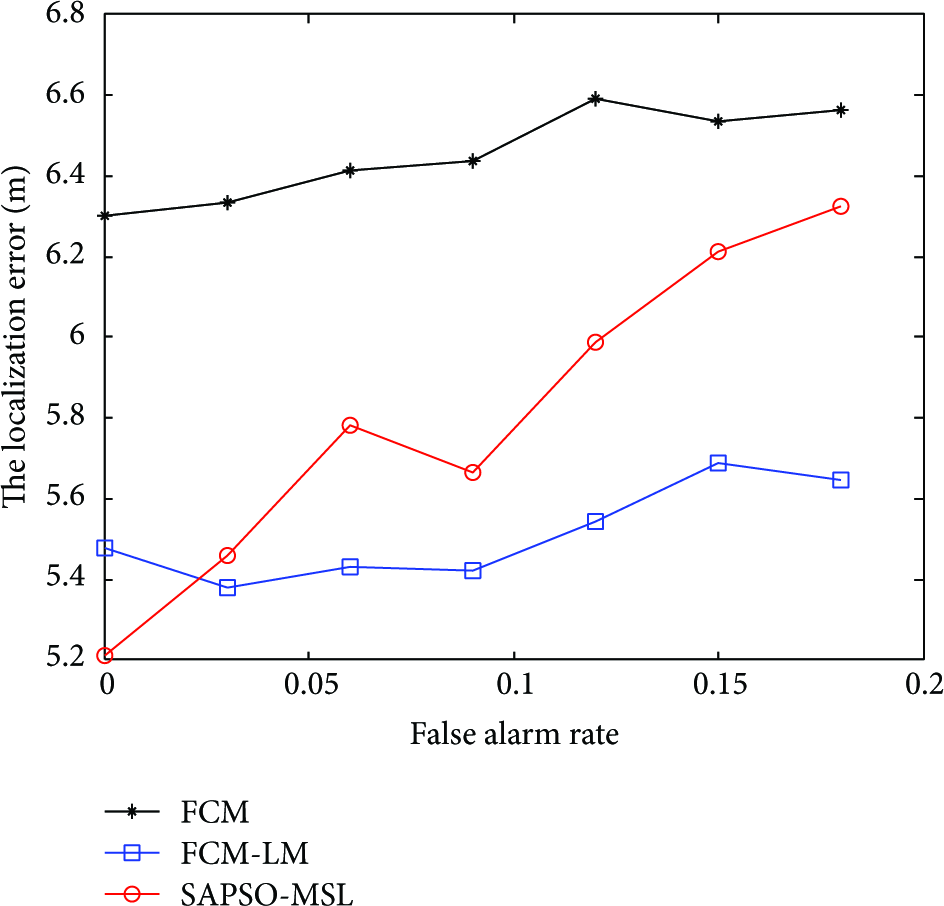
The false alarm rate versus localization error.
Figure 8 shows the evaluation for the convergence of the SAPSO method. Obviously, the convergence of SAPSO algorithm occurs when the number of iterations is 40.

Evaluation of convergence of SAPSO.
6. Conclusion
Multiple source localization technique in sensor network has recently received intensive interests for a large variety of applications. In this paper, we proposed a self-adaptive particle swarm optimization based multiple source localization method for binary sensor network. The maximum likelihood estimator is used to establish objective function. And then the self-adaptive particle swarm optimization is employed to estimate the location of sources. We compared the proposed method with FCM and FCM-LM methods, and simulation results show that the proposed method outperforms other methods. However, the localization accuracy of proposed method decreases when false alarm is large. In the future work, we will improve this method, so that it is more robust to false alarm rate.
Footnotes
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Acknowledgments
This work was supported by the National Natural Science Foundation of China (61403068, 61232016, U1405254), Natural Science Foundation of Hebei Province (F2015501097), Fundamental Research Funds for the Central Universities of China (N130323004, N130323002), Scientific Research Fund of Hebei Provincial Education Department (Z2014078), the NEUQ internal funding (XNB201509, XNB201510) and the PAPD fund.