
Abstract
As wireless sensor networks (WSNs) often provide incorrect and outdated information about the events in a monitored environment, quality of information (QoI) assessment is invaluable for users to manage and use the information in particular applications. In this paper, we propose a flexible framework to dynamically assess the QoI in different WSN applications, with focus on accuracy and timeliness. Our framework is constructed on the infrastructure of an information aggregation procedure under some assumptions about the network. Based on information fusion theory, two processing models are adopted to assess the accuracy of low-level measurement data and high-level decision information without the need for Ground Truth (GT). Meanwhile, our framework generally exploits two respective models according to the specific category of the information timeliness in different delay-sensitive applications. To quantify the timeliness, we utilize a practical measurement method by means of timestamp to determine the information acquisition time. The framework is evaluated by simulations, including accuracy assessment in two environmental monitoring application scenarios, and timeliness assessment in two delay-sensitive application scenarios. The simulation results show that our framework is effective and flexible for quantitative assessment of the QoI in different WSN applications.
1. Introduction
Wireless sensor networks (WSNs) [1] have been widely used for collecting information in different applications, such as military surveillance [2], healthcare [3], environmental monitoring [4], and industrial automation [5]. The success of WSN applications is strongly determined by the quality of information provided by the networks. Quality of information (QoI) may be expressed as the measure of goodness of the information and allows an informed decision to be made about the events in the monitored environment. Unfortunately, due to the inherent characteristics and limited resources of WSNs in malicious environments, low-quality information is prevalent. Incorrect and outdated information could impede learning performance and confuse the decision algorithms, leading to many undesirable consequences such as false alarms, service interruptions, and, often, violation of privacy. Therefore, QoI assessment is becoming more and more important in WSN applications. Users would benefit from knowing the levels of QoI for more accurate and timely situational awareness and therefore safer decision making.
Bisdikian et al. [6] introduced the concept of QoI and presented the importance of addressing this topic in WSNs. QoI is complied with a set of attributes, such as accuracy, timeliness, consistency, completeness, integrity, and certainty. QoI assessment is quantifying the attributes by relevant metrics. Among various attributes, we narrow our research into the two attributes which are considered the most relevant and useful for QoI in WSNs; they are accuracy and timeliness. In previous literature, many research efforts have been specifically addressed to model and evaluate these two attributes in WSNs [7–16]. Bisdikian [7] defined and evaluated the accuracy and timeliness of a sensor-based detector system as a function of the detected signal and the system operational characteristics, such as the sampling rate. Hermans et al. [8] defined the accuracy and timeliness of sensor data in WSNs but did not propose a model and metric to characterize and quantify these attributes. Mathew et al. proposed a SNR based metric which incorporates packet loss and network delay and covers accuracy and timeliness for QoI modeling in delay-sensitive sensor network applications. They analyzed and demonstrated the impact of network delay and application deadlines [12] apart from sensor sampling rate and loss rate [10, 11] on the QoI. Bahjat et al. [13] specifically considered accuracy and timeliness and addressed the quality measure trade-offs in constrained communication networks for image applications. Hossain et al. [14] presented a dynamic model for the assessment of the accuracy and timeliness in the context of a multisensor multimedia monitoring system. They concentrated on the quality of high-level information in surveillance and monitoring applications. Sachidananda et al. [15] comprehensively explained the different views of the attributes on metrics and functional operations mapped with existing work. Abuarqoub et al. [16] identified the variety of definitions of attributes in existing literature leading to ambiguity about QoI measurement and proposed the standard, unified definitions of the accuracy and timeliness for mobile WSNs. Although these two attributes have been relatively well defined and discussed in the preceding research, the correspondingly quantitative assessment is still in its infancy, due to the challenging problems listed below:
Modeling and assessing the QoI (a general designation of accuracy and timeliness in the rest of this paper) in WSNs are highly application dependent, due to the diverse nature of networks, applications, and requirements. The information is distributed over a large number of sensor nodes. Without the Ground Truth (GT, which refers to the known reality) of the monitored event and the information of the other sensor nodes, it is impossible to assess the accuracy in isolation. Because of the dynamic conditions of a network and the unpredictable interaction among nodes, without acquiring the information from all the sensor nodes, it is hard to quantify the individual timeliness precisely. The QoI of the sensor nodes may be dynamically changing. The dynamics calls for the QoI assessment to be performed in an online manner, so that users can better know the levels of the (near) current QoI and tune their responsiveness to the changing QoI over time.
The main purpose of this paper is to address the above challenges. Based on some network assumptions, we propose a flexible framework to dynamically assess the information item-level QoI and sensor node-level QoI in different WSN applications, through aggregating the information items of all the sensor nodes at the sink. Specifically, we concentrate our attention on the two quintessential information types in WSNs, low-level measurement data and high-level decision information. Accordingly, the accuracy of an information item is assessed in the form of data fusion or decision fusion and in detail by the degree to which the information agrees with the fusion result, without the need for GT. Information item-level timeliness is determined by application deadline, delay sensitivity, and information acquisition time. We categorize the timeliness in different delay-sensitive applications and exploit two models for these different categories, respectively. On that basis, the timeliness of an information item is quantified by its acquisition time, which is a period of time when the raw sensor readings are sampled at a sensor node until the extracted information reaches the sink for aggregation and is measured by the time marking algorithm. The framework maintains a sliding information quality window, and the sensor node-level QoI is dynamically updated once the information item-level QoI within the window is refreshed. The main contributions of this paper are as follows:
In terms of information type, two adaptable processing models based on information fusion theory are presented to assess the accuracy of low-level measurement data and high-level decision information without GT, respectively. The timeliness in different applications is categorized for modeling according to delay sensitivity. The models exploited can represent the constancy and variation of the timeliness to the delay within the deadline in different delay-sensitive applications. Simulation results validate the effectiveness of our framework for the QoI assessment in different WSN applications. Our framework can be flexibly tailored to assess the QoI in a particular WSN application, based on information type, application deadline, and delay sensitivity.
The rest of the paper is organized as follows. In Section 2, the preliminaries with assumptions, problem statement, and terminology are described. Section 3 presents in detail the framework for assessing the information item-level QoI and sensor node-level QoI. The proposed framework is evaluated in Section 4. Section 5 concludes the paper.
2. Preliminaries
In this section, we make some assumptions as the preliminary requirement of our work. After discussing the concerned problems, we precisely define the terminology we use in this paper.
2.1. Assumptions
Because of the diverse nature of networks, it is infeasible to establish a generic QoI assessment framework that accommodates all types of WSNs. In this regard, we make the following assumptions:
We consider networks with one sink and n sensor nodes. Some additional relay nodes could also be included. The sink is adequate in power, memory, and processing capabilities. The sensor nodes are homogeneous. Each of them is equipped with m kinds of sensors to measure the parameters of the monitored events separately. The relay nodes only forward rather than process the information from the other nodes. The network protocol suite can guarantee reliability and integrity of the information between the sensor nodes and the sink. All the sensor nodes in a particular application monitor the same events simultaneously. The sink and all of the nodes are synchronous in time. The majority of the sensor nodes have acceptable information accuracy.
2.2. Problem Statement
In this paper, we focus on the accuracy and timeliness. The problems of their assessment are stated in this subsection.
2.2.1. Accuracy Assessment Problem
Accuracy is the most investigated attribute in QoI assessment. In WSN applications, information extracted from the raw sensor readings should accurately reflect the reality of the monitored events. However, because of the noisy collection and imprecise processing, the information might be incorrect. Therefore, it is indispensable for users to know the accuracy for managing and using the information. Accuracy is defined as the degree to which the observed information conforms to the reality and has traditionally been computed by comparing the information with the GT. However, in the general case, GT cannot be known by WSN applications. In addition, representations of the accuracy are not unified in different WSN applications. Take the following two application scenarios of WSNs for example.
Application Scenario 1. When monitoring water quality parameters, the accuracy can be expressed in terms of the numerical difference between the observed information and the true value of the parameter.
Application Scenario 2. In the water quality evaluation, the accuracy can be expressed in terms of the nominal equality between the observed information and the true state of the water quality.
Consequently, the first problem of this paper is how to assess the accuracy without GT in different WSN applications.
2.2.2. Timeliness Assessment Problem
Timeliness is another attribute of concern in QoI assessment. In WSN applications, information from the sensor nodes should be forwarded to the sink as quickly as possible. This is significant in delay-sensitive applications, for the information will become useless if not delivered to the sink within a desired time. Therefore, it is crucial for users to know the timeliness in collecting timely information. Sachidananda et al. defined timeliness as an indicator of the information acquisition time, which includes the elapsed time of raw data collection, in-network processing, and information transport, based on the functional blocks of WSNs [15]. However, because of the highly dynamic and unpredictable nature of the functional operations, it is difficult to precisely compute the communication delay and network latency, which mainly determine the information acquisition time. Besides, even though we have the determined acquisition time, the information timeliness cannot be completely quantified due to the specific delay sensitivity of different WSN applications. Take the following two delay-sensitive WSN application scenarios for explanation.
Application Scenario 1. In the indoor temperature sensing, the measurement data is required to be delivered to the application within an acceptable time delay. The information acquired within the deadline is timely and available to identify the indoor temperature, and the delay cannot impact the sensing performance. The information that arrives beyond the deadline is useless and therefore is treated as lost data.
Application Scenario 2. In a forest fire detection and relief application, when fire suddenly happens caused by lightning, the most critical issue is the immediate identification and response in order to minimize the scale of the disaster. The emergent information (e.g., smoke or extremely high temperature is detected) is required to be delivered to the rescue center before the fire spreads uncontrollably (the deadline). The information acquired within the deadline is timely and available to identify and suppress the fire. Since the fire seriously damages plant life and human property, less delay is of great help to create earlier awareness and response to alleviate the damage. The information that arrives beyond the deadline is of no value for the application.
Therefore, how to assess the timeliness under dynamic network conditions in different delay-sensitive applications is another problem to be investigated in this paper.
2.3. Terminology
Consider the WSN applications which involve n sensor nodes, where each node has a unique identity (ID) numbered in range Information packet ( Information item-level QoI ( In WSNs, the information packets of a sensor node are usually regarded as information flow. To assess the sensor node-level QoI, it is needed to evaluate the information item-level QoI of the flow over a period of time slots. We divide the information flow into some fixed subsections, and every subsection involving W individual information item-level QoI is defined as an information quality window (window). Let window at time t denote the window of width W terminated at time slot t. Sensor node-level QoI (
3. The QoI Assessment Framework
The QoI assessment framework consists of three components: applications at home station, information at sensor and relay nodes, and QoI assessment engine at sink. In this section, we provide functional description of the individual components in Section 3.1, present the models and metrics of information item-level QoI assessment in Sections 3.2 and 3.3, and explain the dynamical assessment of the sensor node-level QoI in Section 3.4.
3.1. Overview
Figure 1 shows the functional blocks of the proposed QoI assessment framework. The basics of the framework can be described as follows. Applications at home station send their QoI requirements to the sink. The sensor and relay nodes generate regular information packets and deliver them to the sink. With the application requirements and the information packets, QoI assessment engine at sink assesses the QoI and exports the result to the home station. In the following we provide further description of the individual building blocks and illustrate an illustrative example detailing the working of the framework.
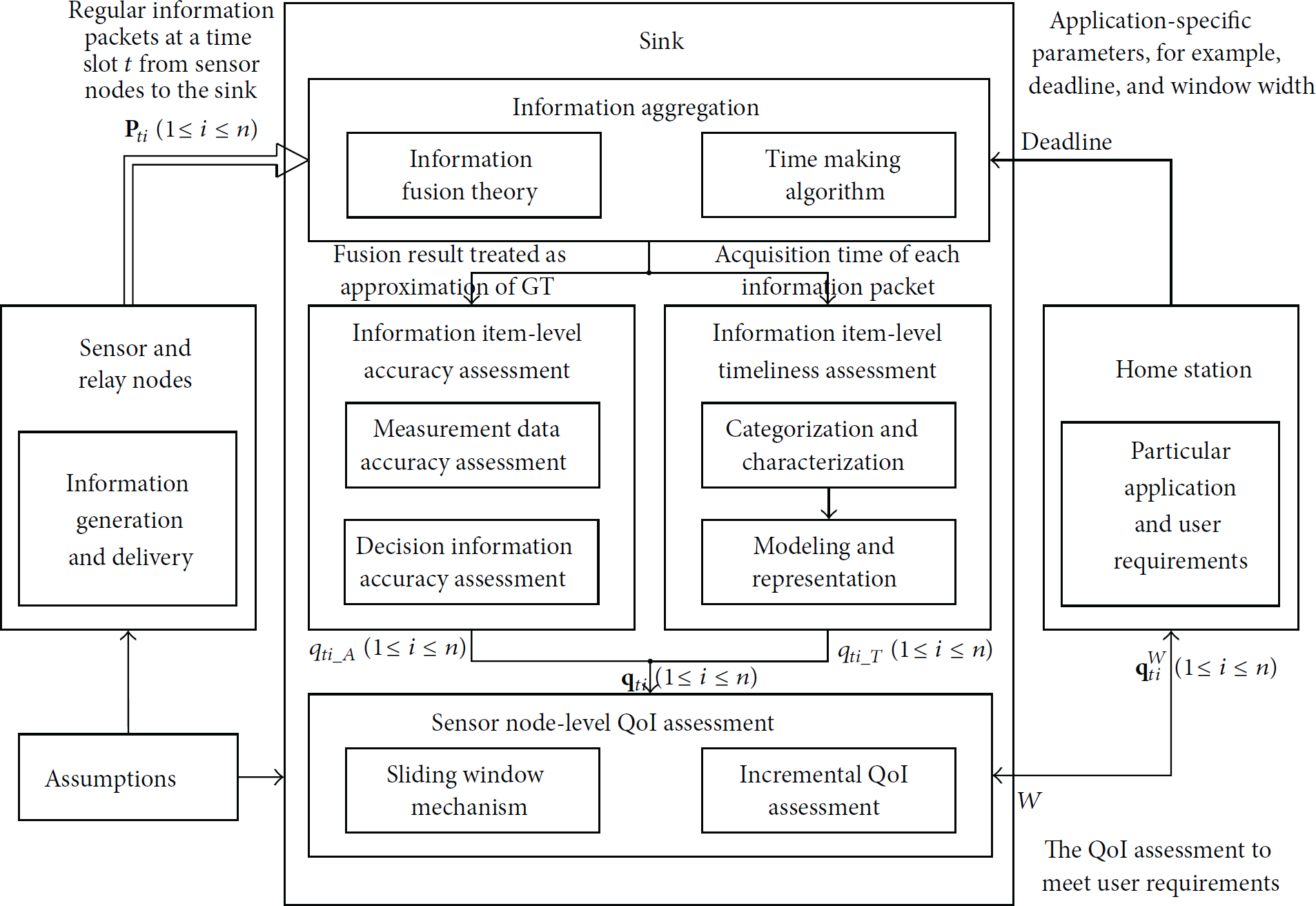
The proposed QoI assessment framework.
3.1.1. Applications at Home Station
The applications collect information from the sensor nodes, perform higher-level analysis, and make appropriate decision. These applications can either be periodic (e.g., temperature monitoring and habitat monitoring) or event driven (e.g., natural or man-made disasters monitoring and military target tracking) [12]. They have different QoI requirements which can be expressed in terms of some parameters (e.g., deadline and window width). These parameters are selected based on the nature of the applications and sent to the sink for determining the QoI.
3.1.2. Information at Sensor and Relay Nodes
When the monitored event takes place or a query comes from the application, all the sensor nodes simultaneously collect raw sensor readings and generate local information items about the monitored event at each time slot, under the assumptions that all the nodes are homogeneous and synchronous in time. The local information item at each sensor node is encapsulated into a regular packet and then delivered to the sink. The relay nodes are assumed to only forward rather than process the information. Also, the sensor nodes can help relay the traffic.
3.1.3. QoI Assessment Engine at Sink
The QoI assessment engine consists of four functional blocks: information aggregation procedure, information item-level accuracy assessment, information item-level timeliness assessment, and sensor node-level QoI assessment. As aforementioned, it is impossible to assess the information item-level accuracy in isolation because of the distributed nature of the information and the unavailable GT. Besides, it is hard to quantify the individual information item-level timeliness precisely without considering the other information items in the dynamic network and unpredictable environment. To tackle these problems, our framework allows all the sensor nodes to deliver their local information items to the sink and suggests that the sink analyze the QoI based on the information aggregation procedure. Since the sink has a global knowledge of the local information items as well as the application requirements, it is beneficial to implement QoI assessment at the sink, under the assumption that the sink is adequate in power, memory, and processing capabilities.
(a) Information Aggregation. Information aggregation is performed using two well-known techniques: information fusion theory and time marking algorithm (TMA). Generally, the quintessential information types required by the applications are denoted as low-level measurement data and high-level decision information, so the information fusion could happen at data level or decision level. Base on the information fusion theory, the sink aggregates the information items of all the sensor nodes and yields a confident result treated as approximation of GT, under the assumption that the majority of the sensor nodes have acceptable information accuracy.
The individual information item-level timeliness in a particular application is quantified by the information acquisition time. Since the discussion in Section 2.2.2 indicates the difficulty of precise computation of this time, our framework utilizes the commonly considered method called TMA to measure the acquisition time of each information packet. Since it is assumed that the network protocol suite can ensure reliable transport, all of the information packets ultimately reach the sink. The TMA does not concern the complex functional operations of the network but only pours attention into two timestamps: when the raw sensor readings are sampled at a sensor node and when the extracted information reaches the sink. It is practical and can efficiently offer excellent measurement accuracy in different applications. The implementation of the TMA will be explained in Section 3.3.3, under the assumption that all the sensor nodes and the sink are synchronous in time.
With the fusion result and the acquisition time, the sink is able to assess the individual information item-level QoI.
(b) Information Item-Level Accuracy Assessment. As previously discussed in Section 2.2.1, the representations of information accuracy are not unified in different WSN applications. Our framework proposes two processing models and metrics at the sink to assess the measurement data accuracy and decision information accuracy. Since it is assumed that the relay nodes only forward rather than process the information and the network protocol suite can guarantee integrity of the information, the network has no effect on the information accuracy, which means the individual value assessed at the sink can be equivalent to that at each sensor node. The detailed description of the measurement data accuracy assessment and decision information accuracy assessment will be provided in Sections 3.2.1 and 3.2.2, respectively.
(c) Information Item-Level Timeliness Assessment. From the discussion in Section 2.2.2, we know that the timeliness characterizations and representations are various in different delay-sensitive applications. Our framework organizes two characterizations to categorize the information item-level timeliness in different delay-sensitive applications and exploits the corresponding models for representation, which will be presented in detail in Sections 3.3.1 and 3.3.2, respectively.
(d) Sensor Node-Level QoI Assessment. Since the individual information item-level QoI is highly dynamic and sharply fluctuant due to changing environment and network conditions, our framework integrates all the individual information item-level QoI within a window of width W and uses the integration value to assess the sensor node-level QoI. Through applying a sliding window mechanism and an incremental QoI assessment (IQA) algorithm, the sensor node-level QoI can reflect the variations of the QoI value in the form of a statistical distribution. The sliding window mechanism and IQA algorithm will be introduced in Section 3.4.
3.1.4. Illustrative Example of the Framework Functioning
When collecting information about the monitored events, a particular application sends its requirements in the form of some parameters to the sink. The sensor nodes generate regular information packets and deliver them to the sink. Meanwhile, the TMA is called at the sink to measure the information acquisition time of each sensor node. After all of the information packets have reached the sink, in terms of information type, a processing model based on information fusion theory aggregates the information and yields a confident result treated as approximation of GT. The information item-level accuracy is quantified by means of the measurement data accuracy assessment or decision information accuracy assessment. The information item-level timeliness is categorized according to the characteristics of the application (e.g., deadline and delay sensitivity), represented by an appropriate model and quantified by the measurement results of the information acquisition time. The sliding window mechanism dynamically updates the information item-level QoI within a window of width W, and the sensor node-level QoI is refreshed by the IQA algorithm. The QoI assessment is exported to the home station to meet the user requirements. The application will change the parameters if necessary.
3.2. Information Item-Level Accuracy Assessment
In this subsection, considering the information types, we present the processing models based on information fusion theory to assess the accuracy of individual low-level measurement data items and high-level decision information items, respectively.
3.2.1. Measurement Data Accuracy Assessment
In some WSN applications such as environmental monitoring, healthcare, industrial monitoring, target location, and tracking, users are interested in the low-level measurement data of the sensor nodes about the value of the monitored event, for this information type can facilitate detailed cognition and numerical calculation. According to the particular application and requirement, at each sensor node, m kinds of raw sensor readings collected at a time slot undergo preprocessing (e.g., filter, transform, and compression) and then are combined as a local measurement data item delivered to the sink. After data association and classification, the same kind of measurement data is aggregated at the sink according to the corresponding fusion method packed with information items. The fusion result is approximated as the true value. Accordingly, the accuracy of the measurement data in an item can be individually assessed by error theory and is integrated to obtain the overall accuracy of the item. Figure 2 illustrates the processing model based on data fusion theory to assess the accuracy of individual measurement data items at a time slot. In this model, different kinds of measurement data are separately processed in data fusion and accuracy assessment. The commonly used data fusion methods are least squares analysis, Kalman filters, weighted average, principal component analysis, wavelet transform, and so forth.

Processing model based on data fusion theory to assess the accuracy of individual low-level measurement data items at a time slot.
Suppose that the local measurement data item of each sensor node at time slot t includes m kinds of measurement data, such as

3.2.2. Decision Information Accuracy Assessment
In some WSN applications such as event detection, disaster warning, target classification, and recognition, users are interested in the high-level decision information of the sensor nodes about the state of the monitored event, as this information type can decrease the network traffic, improve the information acquisition efficiency, and reduce the storage and processing burden of the networks. According to the particular application and requirement, the possible states of the monitored event are represented as a set of propositions. At each sensor node, m kinds of raw sensor readings collected at a time slot undergo feature extraction, correlation, and matching, and herein a set of beliefs that speak for or against the propositions are constructed. Based on the degree of belief in each proposition, the most credible proposition is determined as the nominal decision about the state of the monitored event. The set of beliefs and the determined proposition are combined as a local decision information item delivered to the sink. After data association, the sets of beliefs from all of the sensor nodes are aggregated at the sink according to the fusion method, yielding a fusion result that consists of a new set of combined beliefs and the corresponding most credible proposition. This determined proposition is approximated as the true state of the monitored event. Accordingly, the accuracy of a local decision information item can be assessed through the comparison of nominal equality between the determined proposition of the information item and the fusion result. Figure 3 illustrates the processing model based on decision fusion theory to assess the accuracy of individual decision information items at a time slot.
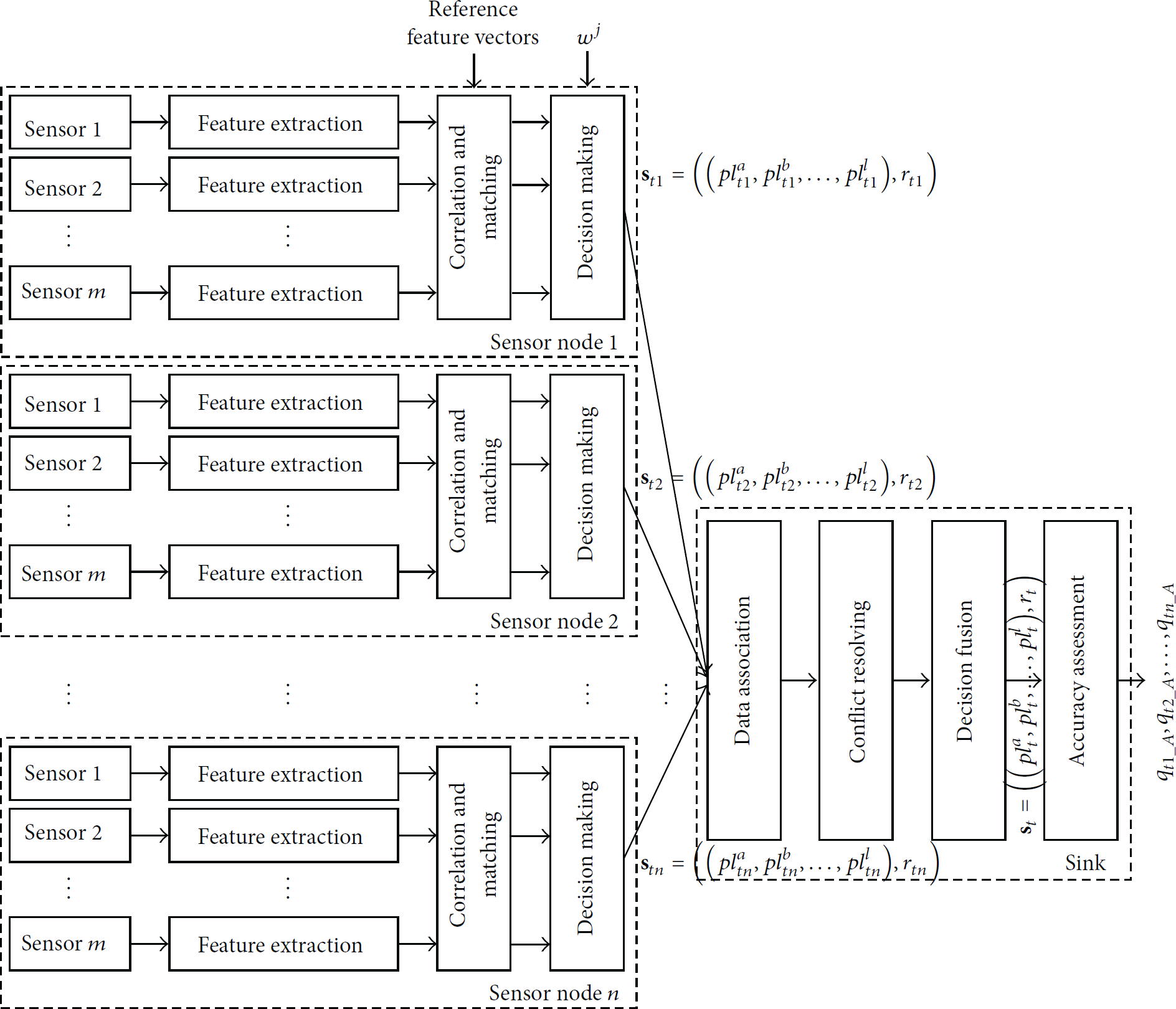
Processing model based on decision fusion theory to assess the accuracy of individual high-level decision information items at a time slot.
In this model, reference feature vectors of the propositions can be known through physical investigation or practical standard. Correlation and matching can utilize grey relational analysis, correlation function, fuzzy membership degree, entropy theory, and so forth. The weight
Suppose that the set of propositions is

The fusion methods of measurement data and decision information are not unified in different applications. To enhance the performance of the accuracy assessment, an optimal method should be developed for making the fusion result more conformable to the true value or state of the monitored event in a particular application.
3.3. Information Item-Level Timeliness Assessment
In this subsection, we first classify the information item-level timeliness in different delay-sensitive applications into two categories. And then, we exploit two models for these different categories, respectively. At last, we explain the practical method utilized to measure the information acquisition time.
3.3.1. Timeliness Characterizations
Timeliness is a contextual attribute which depends on applications. In [17], it relates to judgments made regarding the timely availability of the information in a specific usage context. Accordingly, the timeliness in different delay-sensitive applications can be classified into two categories as follows.
Timeliness Category 1. In some applications such as environment monitoring (marine monitoring, soil monitoring, atmospheric monitoring, air quality monitoring, water quality monitoring, temperature monitoring, humidity monitoring, and pressures monitoring) and habitat monitoring (activities of daily living monitoring, animal monitoring, and greenhouse monitoring), the timeless is a constant and not sensitive to the delay within a desired time (deadline). The information items acquired within the deadline are treated as timely and available information with the best timeliness value, and the information items acquired beyond the deadline are of no value for the applications.
Timeliness Category 2. In some applications which directly impact the safety of human lives and properties, such as natural or man-made disaster relief (fire detection, oil and gas leakage detection, nuclear leakage detection, hazardous chemicals leakage detection, transportation accident detection, and industrial accident detection), military target tracking (intruder, enemy, or terrorist tracking), and healthcare emergency response (patient assistance, elderly assistance, and children assistance), the timeliness is a variable and sensitive to the delay within a desired time (deadline). The information items acquired within the deadline are timely and available to the applications, whose timeliness is inversely proportional to the delay, and the information items acquired beyond the deadline are of no value for the applications.
3.3.2. Timeliness Representations
It is infeasible to establish a generic model for timeliness representations in different delay-sensitive applications. The suitable model for each timeliness category can effectively represent the information item-level timeliness. Let
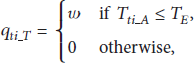
(a) Binary Model. Binary model is applied to the timeliness category 1. In this model, the timeliness value is 1 if


Different models for the two timeliness categories: (a) binary model for the timeliness category 1; (b) decay model for the timeliness category 2.
(b) Decay Model. To represent the characteristic that the timeliness value is sensitive to the acquisition time within the deadline, we introduce w into the modeling in [14] and exploit a decay model applied to the timeliness category 2. In this model, the timeliness value is assigned to w if
As can be seen from Figure 4, the binary model is characterized by a step, which can simplify the problem of timeliness assessment. The decay model continuously samples the timeliness value, which can well represent the sensitivity of timeliness to the actual acquisition time.
Compared with the modeling in [14], the key novelty of our modeling is that the timeliness is a variable and is inversely proportional to the delay within the deadline in safety critical applications. However, the modeling in [14] only reflects the constancy of the timeliness to the delay within the deadline. Within a particular safety critical application context, the timely information with different delay will have distinct timeliness from each other, which can be represented by our decay model rather than the model provided by [14].
3.3.3. Time Marking Algorithm
The TMA is a lightweight centralized algorithm running at the sink, which requires that the sink maintain three variables,
Step 1.
The sink initializes
Step 2.
When the sink receives a new information packet
Step 3.
The sink extracts
Step 4.
The sink maps
Step 5.
The sink computes
Step 6.
The sink counts the number of bits which are 1 in the
3.4. Sensor Node-Level QoI Assessment
As defined in Section 2.3,


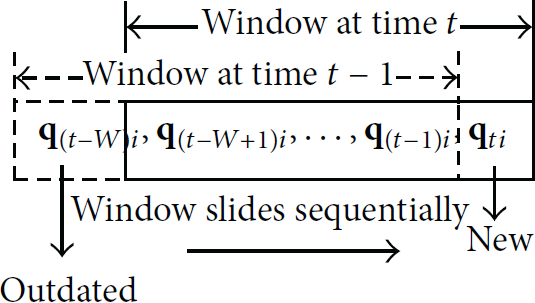
The sliding window mechanism for incremental QoI assessment.
The width W of the window determines the dynamics of the QoI assessment. In fact, a narrower window would enable users to better tune their responsiveness to the changing QoI over time.
4. Performance Evaluation
To validate the effectiveness of the proposed framework, we perform two groups of simulations that consider different WSN application scenarios. This section first gives a brief description of the network used in these simulations. Then, the simulations of timeliness assessment and accuracy assessment in these application scenarios are presented and discussed, respectively.
4.1. The Network
We consider a sensor network consisting of one sink (the solid hexagon node), 10 sensor nodes (the solid round nodes with index numbers), and 20 relay nodes (the hollow round nodes). The network satisfies the assumptions stated in Section 2.1. All nodes are static and communicate with each other via bidirectional multihop wireless links. We consider the node-exclusive interference model; that is, links that share a common node cannot transmit or receive simultaneously. The network protocol suite is a time division multiple access- (TDMA-) based MAC protocol, a minimum hop- (MH-) based multipath routing protocol, and the reliable transport scheme in [19]. Each node knows its direct neighbors. The distances between any two neighboring nodes are the same. The network topology is shown in Figure 6.
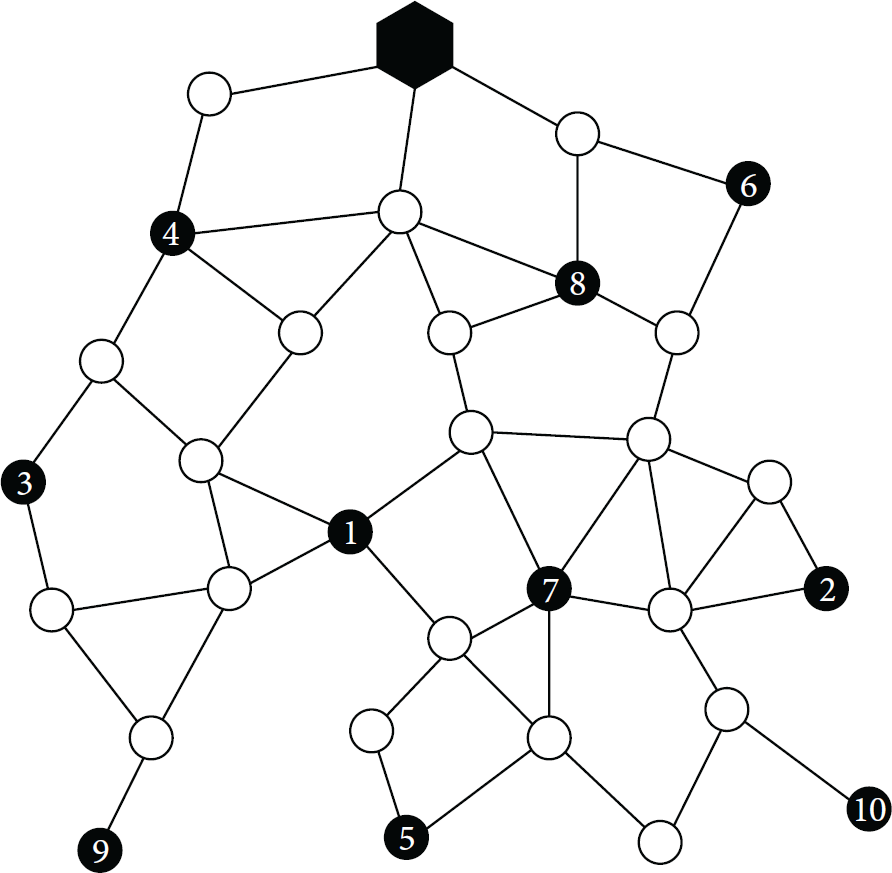
The network topology used in the simulations.
4.2. Timeliness Assessment
In this subsection, we evaluate the framework by simulations of timeliness assessment in the two delay-sensitive application scenarios described in Section 2.2.2. The aforementioned network is used for temperature sensing and fire detection, respectively.
4.2.1. Simulation Settings
This group of simulations spans 150 time slots. As shown in Figure 6, each sensor node sends an information packet to the sink at a time slot, using the MH-based paths determined by the routing protocol. A time slot is divided into 35 sections of scheduled access periods, and the links that share a common node clockwise access the channel for delivering an information packet per section. We assume that all nodes do not experience information packets drop and buffer overflow. Each information packet can reach the sink within a time slot. Based on the transmission rules and assumptions, the acquisition time of each sensor node's information packet in the network topology can be analyzed and quantified. Table 1 lists the minimum and maximum information acquisition time of the 10 sensor nodes during all time slots.
The minimum and maximum information acquisition time of the 10 sensor nodes during all time slots.

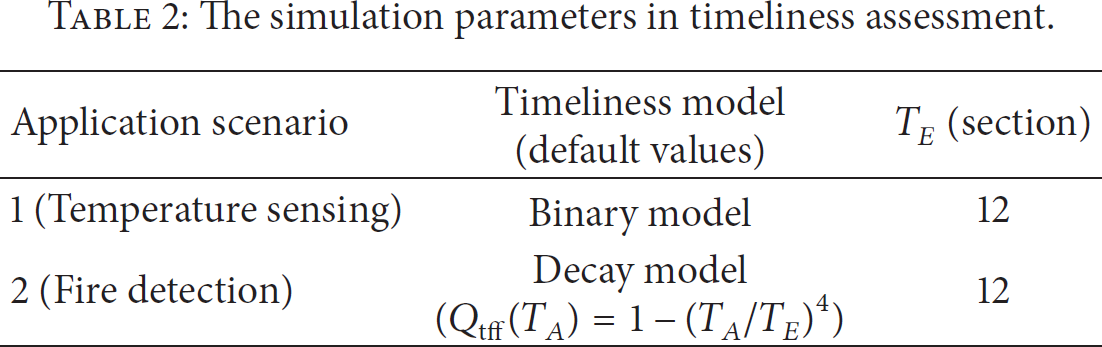
The description and default values of the main parameters required in this group of simulations are shown in Table 2.
The simulation parameters in timeliness assessment.
4.2.2. Simulation Results
We utilize the TMA to measure the acquisition time of the individual information packets at each time slot and obtain the information item-level timeliness in the application scenarios 1 and 2, respectively, using (4) and (5) with the simulation parameters described in Table 2. The width W of the window is set to be 100 time slots, and thus the window slides for 50 times. In each window, we assess the timeliness of individual sensor nodes in the two application scenarios by (7). We regard the analyzed acquisition time in Table 1 as the reference criterion of the sensor nodes, and use it to evaluate the framework for timeliness assessment.
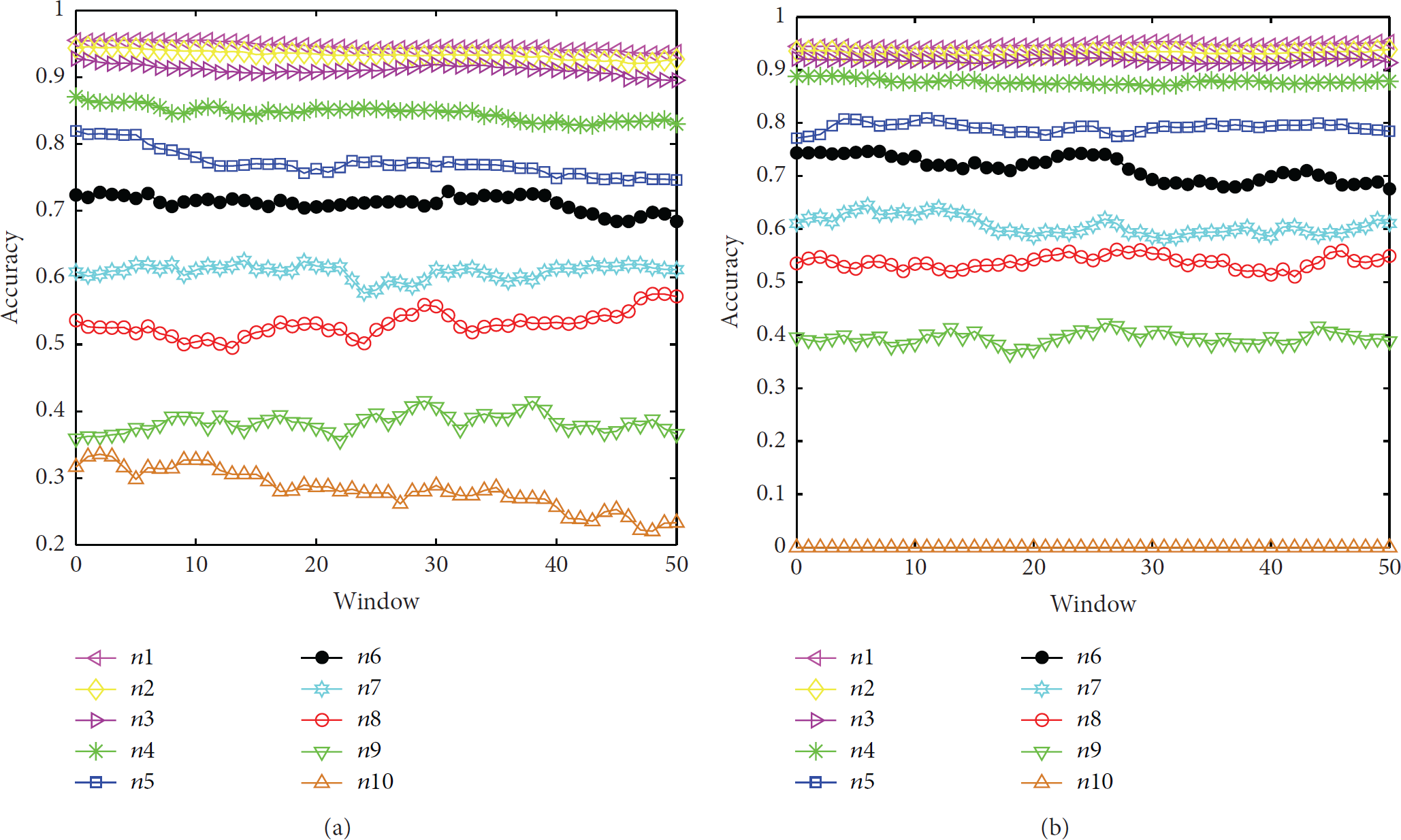
Figure 7 shows the timeliness values of the 10 sensor nodes in the two delay-sensitive application scenarios for the designed 50 windows. As can be seen, our assessment matches perfectly with the reference criterion of the sensor nodes in specific delay-sensitive application scenario. For example, the maximum information acquisition time of nodes 4, 6 (or 8), 3, and 2 is less than
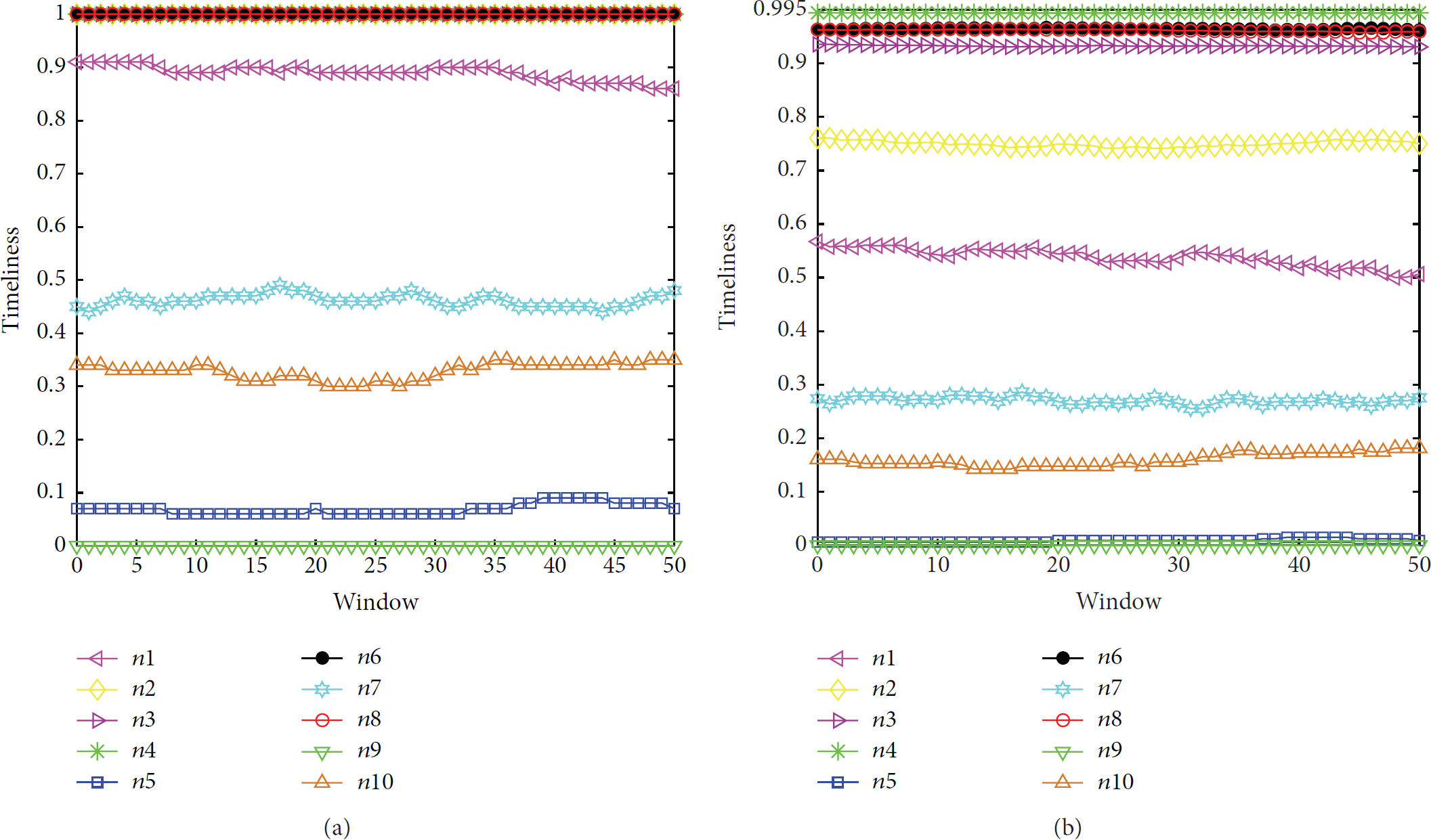
The timeliness values of the 10 sensor nodes in the two delay-sensitive application scenarios: (a) a temperature sensing application scenario; (b) a fire detection application scenario. In the figure, the x-axis represents the number of windows whereas the y-axis represents the average timeliness value in each window.
A point we should touch on is that the timeliness of individual sensor nodes cannot be completely quantified by the information acquisition time. For example, the information acquisition time of nodes 4, 6 (or 8), 3, and 2 is distinct from each other. However, the timeliness of these nodes achieves the same value for all the windows in the application scenario 1 as shown in Figure 7(a). Accordingly, we develop the timeliness definition in [15], in which timeliness is an indicator of the information acquisition time for a particular application deadline and delay sensitivity.
The results match perfectly with the reference timeliness. They demonstrate that our framework can assess the timeliness in different delay-sensitive applications according to delay sensitivity and validate the effectiveness of our framework for timeliness assessment. When assessing the timeliness in a particular application, the user should first distinguish the timeliness category according to delay sensitivity, confirm the appropriate model and followed function, and then quantify the timeliness through the measurement of the information acquisition time.
4.3. Accuracy Assessment
In this subsection, we evaluate the framework by simulations of accuracy assessment in the two environmental monitoring application scenarios described in Section 2.2.1. Empirical evidence shows that water quality parameters, such as dissolved oxygen (DO), NH3-N, total phosphorus (TP), and total nitrogen (TN), are sensitive indicators of contaminants. Thus, in this group of simulations, we regard these 4 parameters as the feature vector (DO, NH3-N, TP, and TN) and use the aforementioned network to measure the parameters and evaluate the water quality in a monitored area, respectively.
4.3.1. Simulation Settings
(a) Simulation Data. They are presented as follows.
Reference Feature Vectors. According to “Environmental Quality Standards for Surface Water of China GB 3838-2002,” water quality is categorized into 5 classes. The feature vectors of all the water quality classes are shown in Table 3, which are regarded as the reference feature vectors in this group of simulations.
Reference feature vectors of the 5 water quality classes.
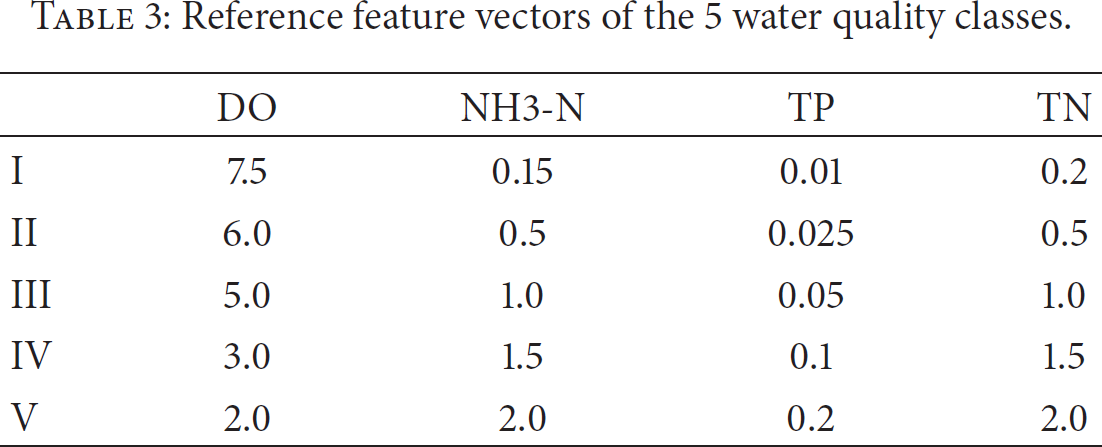
Measurement Data Items. In the water quality parameters monitoring, each measurement data item of a sensor node contains 4 kinds of measurement data, corresponding to 4 water quality parameters. For each kind of parameter, we generate the measurement data of the 10 sensor nodes separately by adding random Gaussian noise to the reference feature which is corresponding to a particular water quality class. Table 4 lists the level of the noise added to each sensor node. The metric of noise level is the signal-to-noise ratio (SNR). If the sensor node is faulty (node 10), we regard its noise level as infinity.
Noise level.

Decision Information Items. In the water quality evaluation, the set of propositions is
(b) Simulation Parameters Description. The description and default values of the main parameters required in this group of simulations are shown in Table 5.
The simulation parameters in accuracy assessment.

Weighted Average. In the water quality parameters monitoring, the same kind of measurement data in all the items is aggregated by the weighted average approach [21], wherein the associated weight of each measurement data is codetermined by the self-support operator and mutual-support operator introduced in [22]. Accordingly, the accuracy of the measurement data is individually calculated by (1). As the default weight of individual accuracy of measurement data is 1, the overall accuracy of a measurement data item in (2) can be deduced as the average value of all the individual accuracy of the measurement data in the item.
Evidence Theory. In the water quality evaluation, all the decision information items are aggregated by the Dempster-Shafer evidence theory [23, 24], where the set of beliefs of each decision information item is considered as a body of evidence and each belief is defined as a mass function. After a weighted averaging for conflict resolving [25], evidence from each sensor node is combined with the others by the Dempster-Shafer rule. The proposition owning the maximum mass function of the combined evidence could be determined as the water quality class, if the difference of the mass function between this proposition and other propositions of Θ is greater than 0.2. Otherwise, the water quality class is U. Based on the determined water quality class, the accuracy of individual decision information items is obtained by (3).
4.3.2. Simulation Results
We assess the measurement data accuracy and decision information accuracy of individual sensor nodes by (7), using the aforementioned data and simulation settings. This group of simulations spans 150 time slots, and thus the window slides for 50 times. We regard the noise level in Table 4 as the reference accuracy of the sensor nodes and use it to evaluate the framework for accuracy assessment.
Figures 8 and 9 show the measurement data accuracy values and the decision information accuracy values of the 10 sensor nodes for the designed 50 windows, respectively. As can be seen, our assessment matches perfectly with the reference accuracy of the sensor nodes, that is, the levels of noise added to the sensor nodes. For example, node 1 has a noise level of 40, which indicates that almost no noise is added to the original features. Consequently, the measurement data items and the decision information items of node 1 would be rather correct, represented as the comparatively high accuracy value shown in Figures 8 and 9. As another example, node 10 has a noise level of −1, which means the intensity of the noise added is greater than the original features. Therefore, the measurement data items and the decision information items of node 10 would be rather incorrect, reflected as the comparatively low accuracy value shown in Figures 8(a) and 9(a). Even worse, node 10 has an infinite noise level, which means the original features cannot be captured from the noise. Therefore, the measurement data items and the decision information items of node 10 would be completely wrong. As shown in Figures 8(b) and 9(b), the accuracy value is maintained as a constant of 0 for all the windows. As seen, all nodes generally maintain their accuracy values for all the windows. The fluctuations are due to the random added noise.
The measurement data accuracy values of the 10 sensor nodes in the water quality parameters monitoring: (a) SNR of node 10 is −1; (b) SNR of node 10 is infinite. In the figure, the x-axis represents the number of windows whereas the y-axis represents the average accuracy value in each window.

The decision information accuracy values of the 10 sensor nodes in the water quality evaluation: (a) SNR of node 10 is −1; (b) SNR of node 10 is infinite. In the figure, the x-axis represents the number of windows whereas the y-axis represents the average accuracy value in each window.
The results match perfectly with the reference accuracy. They demonstrate that our framework can assess the accuracy of measurement data and decision information without GT and validate the effectiveness of our framework for accuracy assessment. When assessing the accuracy in a particular application, the user should first confirm the appropriate processing model and information fusion method in terms of information type and then quantify the accuracy through approximating the fusion result as GT.
5. Conclusions
QoI is a fundamental requirement in any WSN application. In this paper, we focus on the accuracy and timeliness and propose a flexible framework to solve the problems of their online assessment in different WSN applications. In developing this framework, we first introduce the infrastructure, that is, information aggregation. Then we elaborate on the models and metrics derived for assessing the information item-level QoI and sensor node-level QoI. The simulation results of our accuracy assessment in the two environmental monitoring application scenarios and timeliness assessment in the two delay-sensitive application scenarios have validated the effectiveness of our framework. In addition, two conclusions can be drawn. The first is that the accuracy should be assessed in terms of information type, and based on information fusion theory the accuracy can be quantified without GT. The second is that the timeliness is codetermined by the application deadline, delay sensitivity, and information acquisition time. Users can flexibly assemble the models and tailor the metrics of our framework for QoI assessment and QoI-based sources selection in different WSN applications.
Footnotes
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Acknowledgments
This work is sponsored in part by the National Natural Science Foundation of China (nos. 61374008 and 91320202), the Innovation Foundation for Postgraduate of Hunan Province (no. CX2011B012), and the Innovation Sustentation Foundation for Excellent Postgraduates of National University of Defense Technology (no. B140302).