
Abstract
Evolution in wireless sensor networks (WSNs) has allowed the introduction of new applications with increased complexity regarding communication protocols, which have to ensure that certain QoS parameters are met. Specifically, mobile applications require the system to respond in a certain manner in order to adequately track the target object. Hybrid algorithms that perform Continuous Monitoring (CntM) and Event-Driven (ED) duties have proven their ability to enhance performance in different environments, where emergency alarms are required. In this paper, several types of environments are studied using mathematical models and simulations, for evaluating the performance of WALTER, a priority-based nonpreemptive hybrid WSN protocol that aims to reduce delay and packet loss probability in time-critical packets. First, randomly distributed events are considered. This environment can be used to model a wide variety of physical phenomena, for which report delay and energy consumption are analyzed by means of Markov models. Then, mobile-only environments are studied for object tracking purposes. Here, some of the parameters that determine the performance of the system are identified. Finally, an environment containing mobile objects and randomly distributed events is considered. It is shown that by assigning high priority to time-critical packets, report delay is reduced and network performance is enhanced.
1. Introduction
Performance in wireless sensor networks (WSNs) protocol is typically determined by its energy consumption under desired conditions, which in turn determines the network lifetime (period of time in which the network is considered to be functional). This is due to the energy restriction presented in the nodes (small devices with sensing and wireless transmission capabilities, which are battery supplied). However, as power electronics evolve, other quality of service (QoS) parameters are gaining relevance, such as report delay and packet loss probability. These parameters determine the overall performance of the network. When monitoring time-critical events, such as disaster management or object tracking/detection applications, these parameters become much more relevant. If the network fails to deliver an alarm message in time, the entire environment may be put at risk, resulting in important information or monetary losses for the user. Furthermore, nodes are now capable of allocating several sensors, hence granting the ability to monitor a wide variety of physical factors, such as temperature, soil moisture, air composition, and/or movement simultaneously [1–3]. This increases network versatility but also jeopardizes performance, due to the fact that different data packets require different QoS parameters. This is specially true when both continuous monitoring and event detection applications must coexist in the same network.
In the literature it is common to find wireless sensor networks designed for either continuous monitoring (CntM) [4, 5] or event-driven detection (EDD) applications [1, 6, 7]. EDD WSNs are designed in order to send data in a sporadic fashion whenever a group of nodes detect an event of interest. Conversely, in CntM networks, all nodes in the system are set to transmit data periodically to the sink node; as such, the end user always has updated data from the surveyed region. Applications where both CntM and EDD are required have been largely overlooked. In EDD WSNs [6], communications are only triggered by the occurrence of a prespecified type of event, which typically comprises a sensor measurement that exceeds a determined threshold, which occurs due to unusual conditions inside the network area. In these environments, it is advisable that data packets containing specific events are transmitted faster than the rest of the packets. These event reports may contain, for example, alarm messages related to explosions, chemical leaks, floods, or earthquakes and therefore represent high priority events. On the other hand, other types of events, such as a small increase in some parameters, do not require immediate transmission since they may represent slightly unusual or long-term conditions such as rain occurrence, environmental temperature increase/decrease, or pressure changes. The studied protocol in our previous work [8] presents a cluster-based architecture with EDD and CntM capabilities. As such, while no event is detected, the nodes transmit data in a periodical fashion to the sink node in order to examine the evolution of certain parameters and obtain tendencies. This is performed using a TDMA-like protocol in a clustered architecture. Once an event is detected, the nodes inside the event area shift to contention mode in order to send the event-related information as soon as possible using a random access protocol. The main goal of this protocol is to transmit event data efficiently while sending data periodically, so the network administrators are aware of the adequate operation of the network. By limiting the CntM transmissions, network lifetime and energy consumption are enhanced. Furthermore, when a multievent environment is considered, setting a higher transmission probability to time-critical packets significantly, improves QoS. A previous study is now extended by proposing a simple Markovian model in order to study energy consumption and packet latency in a hybrid WSN (where both CntM and EDD are considered). Also, a priority scheme that allows the transmission of different event-related packets by means of a random access (RA) protocol is proposed and studied. As such, the priority scheme uses different transmission probabilities in order to guarantee a lower report latency in packets from a more important event. Finally, the case where the events are triggered by a mobile target is studied in the context of the hybrid priority-based protocol.
The rest of the paper is organized as follows: Section 2 reviews the previous work related to priority-based and mobility-aware protocols in the context of WSNs, followed by the network model and assumptions described in Section 3. In Section 4, the proposed protocol is described, and in Section 5 it is mathematically analyzed using a discrete-time Markov chain. Section 6 presents some relevant results derived from simulations and the analytical model for several scenarios, including randomly distributed events, mobile environments, and a multievent environment, where object tracking and environmental monitoring are performed. The paper concludes with a summary of results and conclusions.
2. Related Work
Hybrid protocols, such as APTEEN [7], have been proposed for the transmission of both CntM and EDD applications. However, only randomly generated events have been considered for performance analysis purposes. In [9], a transport layer protocol is developed, in which priority is based on the information content of each data packet. Whenever a node receives several packets from its neighbors, it rearranges those packets according to their priority level, thus sending the high priority packet first. Note that the packets, in this case, are generated periodically and the rate is controlled by the sink node, so no collisions can occur. Furthermore, each node generates a specific type of data, which means that all data packets transmitted by a specific source have the same priority whether or not an important event is detected.
In [10], a priority handling scheme has been presented, where CHs (cluster heads) define time intervals in which only packets that contain a high priority label are able to perform channel reservation duties. In case no high priority transmission request is sent, low priority packets are able to contend for channel utilization. While this approach theoretically reduces report delay for important packets, it requires more energy per event transmission due to request-to-send (RTS) and clear-to-send (CTS) messages. Furthermore, if several nodes require using the channel during a single high priority phase, collisions are likely to occur. In PSED [11], several types of events can occur within the area of interest and priority is assigned based on the potential damage that the event represents. Whenever an event is detected, data packets are sent to the CH; then, the CH sends request messages to the mobile nodes within its transmission range, which are guided (based on each event priority) to the detection zone for aiding the event sensing nodes to transmit their packets reliably. In this particular protocol, transmissions occurring between the cluster members and the CH do not consider event priority, and hence event reporting delay is not reduced during this phase. Also, since packet transmission is carried out by the mobile nodes, report delay is highly dependent on their distance from the event and their speed. In this case, mobility in the WSN is achieved by granting mobile capabilities to a determined number of nodes (such as adding a vehicle controlled by the network administrator or the network itself). However, mobility in WSNs may be introduced by means of several other methods, such as granting the nodes the capacity of detecting mobile entities [3] (by including proximity sensors on the nodes or by attaching a radio frequency (RF) transmitter to the mobile entity of interest). In the former, mobility may be handled by defining synchronization intervals in the time frame such as in [12, 13]. This approach reduces synchronization time with the nearest CH. Conversely, little research has been conducted for QoS in static networks in charge of monitoring mobile entities with transmission-only capabilities. This type of networks may be used to report several parameters ranging from vital signs [14, 15] to alarm messages and, by representing independent mobile objects (MOs), their behavior is not controlled neither by the network nor by the user.
The main differences between the aforementioned work and the one presented in this paper are as follows: priority is assigned with a similar purpose as in [10], which is meant to improve report delay on relevant event packets that may contain time-critical data. However, priority is handled by assigning different transmission probabilities to event packets in a RA protocol operating on a slotted channel. This approach is intended to increase the frequency of high priority transmission attempts (considering that collisions occur between high and low priority packets) rather than performing channel reservation duties (which require a higher amount of transmissions per reported packet). Furthermore, an environment where independent mobile objects are distributed within the network and its presence generates high priority packets in the sensor nodes is studied. By doing this, results related to operational parameters that enhance QoS under these conditions are presented, results that have been scarcely studied in previous work.
3. System Model
In this section, the main network parameters and assumptions considered throughout the paper are described.
This work is centered on a cluster-based WSN protocol named WALTER (WSN ALTernating CntM/ED block protocol for nonpreemptive event reporting) with continuous monitoring (CntM) and event detection (EDD) capabilities. This protocol was previously presented in [8] and additional features have been included for the present study. In particular, we consider a clustering protocol similar to LEACH [4], where a certain number of clusters are formed. Each of those clusters contains a node called cluster head (CH). This node gathers the information of all cluster members (CMs) and sends it directly to the sink node. The role of nodes acting as either CHs or CMs shifts constantly throughout the operation of the network. This is done in order to avoid fast battery depletion of nodes acting as CHs, since their transmissions require high power in order to reach the sink node. Once the cluster is formed, nodes send the collected information based on either random access or continuous monitoring, depending on the generated time schedule. During CntM, data is reported periodically to the sink node using a contention-free time division multiple access protocol (TDMA). Since the nodes transmit data continuously, resources are not wasted as each time slot is used by a particular sensor node inside the cluster. Conversely, in the proposed protocol, for both the cluster formation and the event reporting phases a random access protocol based on the NP/CSMA protocol is used. Since these transmissions only occur at certain moments in the operation of the system, it is not practical to preassign resources to specific nodes for these purposes. Furthermore, it is not possible to predict which sensors would be active at any given time, due to the random nature of both, joint packet transmission and event reporting. Hence, the active nodes contend among each other in order to gain access to the medium. It is then essential to carefully select the parameters that trigger the detection and transmission for the random access protocol in order to maintain an acceptable operation of the network. This is usually determined by QoS parameters such as energy consumption and report latency. Specifically, the transmission probability assignment for high priority and low priority events is of particular interest and will be further analyzed in this work.
The following assumptions and system parameters are considered. The total number of sensor nodes in the system is
The sink node is located outside the supervised area at the coordinate

where

On the other hand, a low-energy transmission is performed whenever a CM sends data to its CH. In this case, cluster nodes are set to transmit their data to up to

The energy to receive a packet depends on the time the communication circuits must be enabled; hence, as the transmission rate is set to be 40 kbps, the total time required for transmission depends only on packet size, which gives

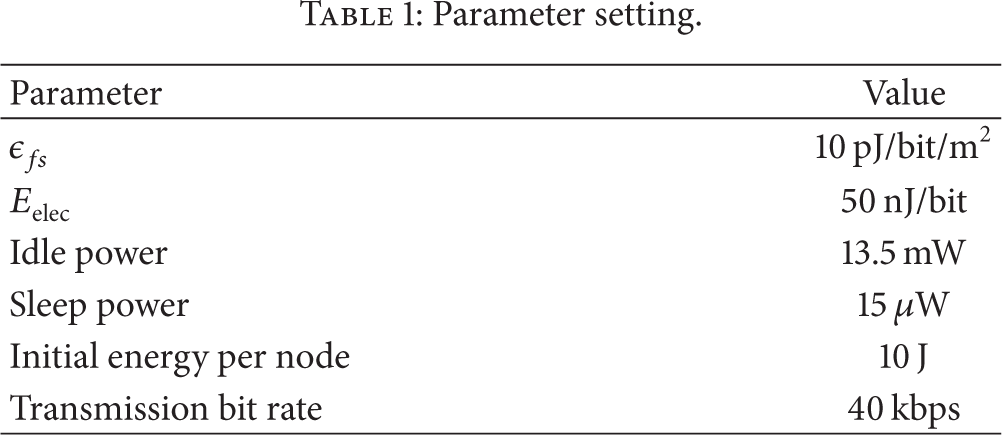
It is worth noting that communication circuits in CHs must be on at all times in order to be able to receive packets from their CMs in every phase, so the consumed energy of these nodes depends on the number of time slots in each round. Each CH dissipates energy in receiving and transmitting the signals received from the cluster nodes. The steady state phase is considered to be of 20 seconds. A GB (geometric backoff) policy is employed for collision handling, with parameters
Parameter setting.
Simulations in this work are conducted until one node in the network has completely depleted its energy (except when network lifetime is studied) and delay is computed as the average time needed for the transmission of every data packet generated by an event for every cluster. Figure 1 presents the basic system considered in this work. Note that a single-hop system is assumed. The rationale behind this is to avoid the use of a routing algorithm that affects the energy consumption on the system. This is because a multihop system must decide the appropriate routes to relay the packets through the multiple available choices. As such, nodes in a preferred route would consume more energy than nodes further away form the sink node. Since the objective of this work is to study the impact of the random access protocols through the use of priorities, we avoid the aforementioned effects of the selected routing protocol. Specifically, it would be very difficult to know if a certain node consumed its energy due to the use of the priority scheme or due to the fact that it was in a high traffic route in the network. Finally, the use of multihop schemes entails a higher packet delay compared to single-hop schemes. This issue will be explained in detail in a future section. Additionally, many routing protocols have been proposed in the literature specifically aimed at WSNs applications and the selection of one of these is not a trivial task. As such, we leave this issue for future work since it is outside the scope of this paper.
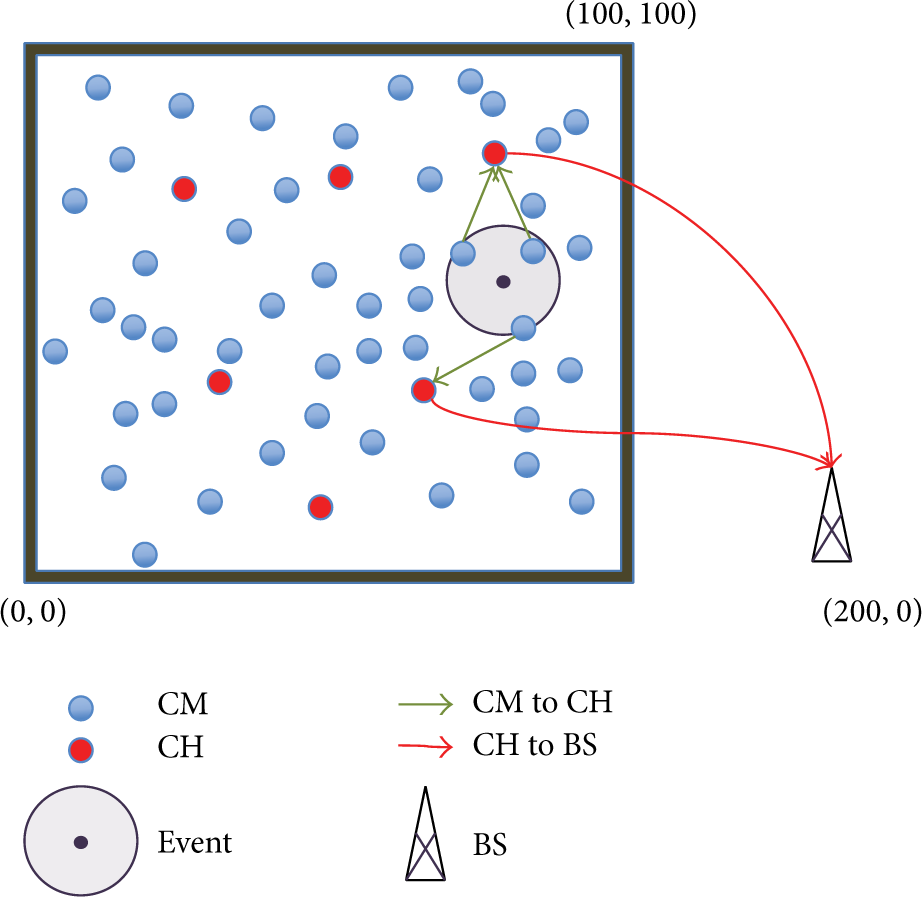
Basic system model for performance analysis.
4. WALTER (WSN Alternating CntM/ED Block Protocol for Nonpreemptive Event Reporting)
Figure 2 presents the basic operation of WALTER, a hybrid protocol with CntM and EDD capabilities.

Time frame for WALTER.
First, clusters are formed in the CF (cluster formation) interval according to [4]. Once the CF is over (when all nodes are either CMs or CHs and all nodes belong to a particular cluster), event detection is performed using a random access (RA) protocol, and it is denoted by the ED period. Whenever an event packet is received by the CH, it is transmitted to the sink node using a particular CDMA code during the next time slot. This is in order to avoid collisions between clusters. When the scheduled time for random access is over and no more cluster members have event data for transmission, TDMA is performed. It is worth noting that TDMA starts only if every node within a cluster has no event packets left for transmission; in case that some event packets are awaiting transmission, TDMA is delayed. This approach is used because we consider that, in a hybrid protocol, event reporting has higher priority than CntM data. At the end of the TDMA interval, the CHs transmit the gathered information to the sink node. This process is repeated for 20 seconds, when the scheduled time for the next CF phase is reached.
The benefits of using a hybrid protocol capable of the transmission of event-related and CntM data, as opposed to using either an EDD or CntM specific protocol, have been studied in [8]. Particularly, a hybrid protocol presents a larger network lifetime than LEACH and TEEN when operating in a low-rate event detection environment and when a CntM-like behavior is needed. Network lifetime for an environment with randomly generated events for LEACH, TEEN, and WALTER with disabled priority is shown in Figure 3.

Network lifetime comparison between two characteristic WSN protocols and WALTER.
Figure 3 also illustrates the effects that different values of
5. Analytical Model
Given the WALTER protocol, a Markov model [19] is used to analyze energy consumption and report delay depending on the average number of nodes attempting transmission. First, the case where no priorities are enabled is considered. The analysis that follows is the same for the CF or event reporting phases. In the former, we start with N nodes, each one transmitting with probability
The aforementioned system can be modeled as a discrete-time Markov chain, W, depicted in Figure 4, where the states represent the number of nodes that have not yet successfully transmitted their packet.

Markov model for nonpriority event reporting.
The state space of W is thus
The time (number of time slots, each lasting 0.05 s) that W spends in state n,

Therefore, the mean time to form the cluster is

On the other hand, the average event reporting time of all the nodes that sense the event is

Finally, the average energy required for the transition of the system from state n to

where

which gives

where the energetic cost of a failed transmission attempt for each time slot, γ, is

By substituting (11) in (10) we obtain the formula for the required energy for the transition from state n to

This model may be used to calculate energy consumption for both event transmission and cluster formation by adding the consumed energy for each n. As the process of cluster formation requires only one transmission from the CH, the total energy required to form a cluster is

For event reporting, the CH is set to transmit to the BS (base station) each time a packet containing event data is received; therefore,

As stated in Section 3, a single-hop network is considered. This is due to the fact that multihop delivery has been found to present a higher latency when compared to single-hop [9, 20]. To evaluate this statement, consider the following assumptions.
While on TDMA CHs are unable to send data directly to sink, thus assuming that these nodes are able to receive a relay request in these phases, they must wait for RA to send the requested message. The number of TDMA slots left is denoted by
During steady state phases, a same number of time slots are used for both TDMA and RA. Therefore, the probability of requesting a packet retransmission by a specific CH while being busy (performing TDMA) is
The desired number of clusters is set to 5; then, as
As the clusters operate independently, the probability of receiving a relay request in each time slot is uniformly distributed. Then, the average increase in report delay due to a n-hop transmission is

Here,
A bidimensional Markov model as the one shown in Figure 5 is used for the case when nodes are able to detect high and low priority events. Here, N represents the number of nodes detecting a high priority event and M represents the number of nodes that detect the low priority event. Recall that nodes that detect a high priority event transmit with probability
to state
to state
to state
Let

Specifically, we are interested in finding the average time that both the nodes that sense the high and low priority events report their data. Hence, we numerically solve (16) for

Markov model for high and low priority event reporting.
Parameters section at the end of the paper depicts the variables used for analyzing WALTER by means of the described Markov model.
6. Numerical Results
6.1. Static Environments: Priority Disabled
QoS analysis is conducted using the Markov model described in Section 5 and a discrete-time event simulator developed in C++. The proposed Markov model is first used to validate simulations when no priorities are assigned; hence the transmission probability per time slot in each node during RA phases is
Figure 6 shows the average delay for event packets with different values of detections per event in each cluster. In this case, three ways for achieving event detections for each cluster were considered, as shown in Figure 6: (a) a deterministic approach, called Fixed strategy, where a certain number of nodes per cluster are set to perform event detection duties, and then when every node in a cluster is affected by an event, μ detections are triggered; (b) a probabilistic approach, called Average strategy, where a number of reporting nodes are chosen randomly and where a random number of nodes uniformly distributed in the ranges 0 and
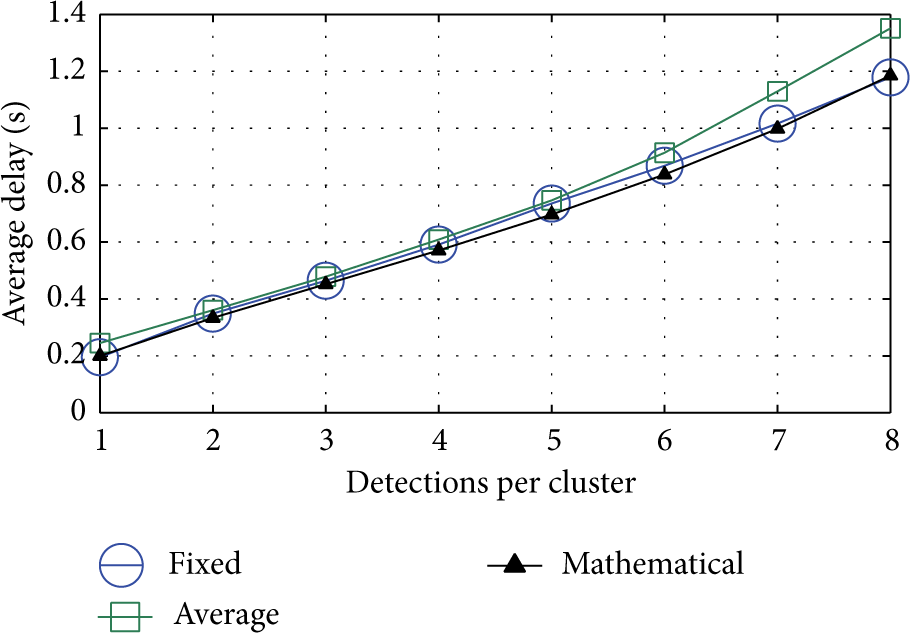
Average event transmission delay in a nonpriority environment for different values of reporting nodes per cluster.
In the Fixed strategy, it is assumed that the network manager decides the number of nodes that report their sensed data whenever an event occurs (given that the event affects the entire cluster); for example, 10% of the nodes in the cluster may report the event. This represents an efficient option in order to limit the amount of transmissions in the network, but the accuracy of the reported event may be reduced. The specific protocol to select these nodes is not straightforward and we leave this issue for a future work. For the Average strategy, each CH broadcasts the value of a uniformly distributed variable
By comparing the results in Figure 6 with (15), it may be seen that the expected increase in report delay due to multihop transmissions is significant. In fact, it is higher than the average delay for successfully reporting an event with a single detection, even for
Building on this, we study the effect of the event detection radius. Here, uniformly distributed events are generated within the area with center

Average detection for each generated event in a nonpriority environment with uniformly distributed events with radius of detection R.
In order to adequately calculate average report delay for randomly distributed events, the proposed Markov model must include the probability of n nodes detecting the event. Then, (7) becomes

By using (17), the error obtained between simulation and mathematical results is acceptable, as shown in Figure 8. However, computing the probability distribution of detecting nodes,
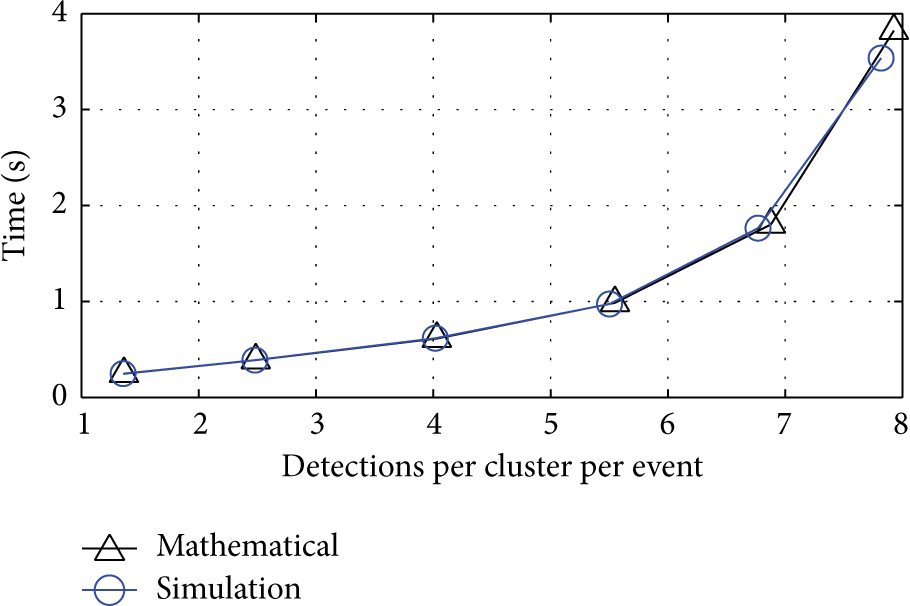
Average event report delay in a nonpriority environment with uniformly distributed events with radius of detection R.
Regarding the detection strategies, it can be seen that the Fixed strategy achieves a lower reporting delay than the Average and Radius strategies. As such, we focus on this strategy for the rest of the results presented in this section, as well as the basis for the mathematical model presented in the previous section, when randomly distributed events are considered. As expected, the average delay increases along with the number of simultaneously triggered transmissions per cluster. It is worth noting that, in order to achieve an adequate performance, a suitable threshold(s) value for event detection duties must be selected. Specifically, when set to a higher value than needed, several events may be overlooked and, when set to a lower level than required, network congestion is likely to occur due to an increased rate of event detections and transmissions. Therefore, the network manager has to carefully select this threshold value. This is of special importance as energy consumption in contention mode highly depends on the number of simultaneously triggered transmissions for both cluster formation and event reporting phases. Figure 9 shows the total energy consumption per event report for different values of nodes detecting the event and a close match between the simulation and mathematical results is observed.
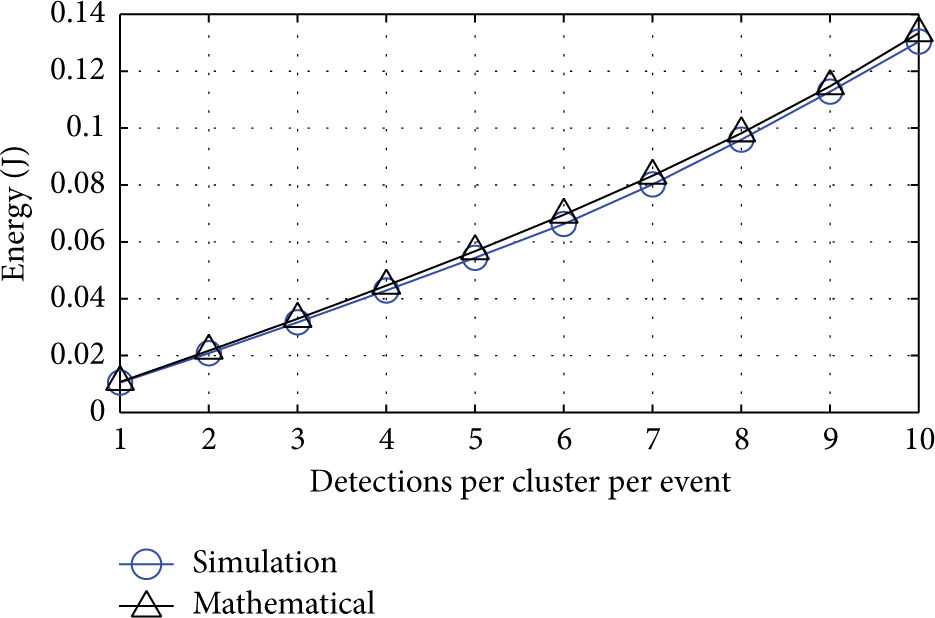
Average energy consumption per event transmission in a nonpriority environment with uniformly distributed events.
Specifically, the error between mathematical and simulation results is lower than
Also, this figure shows that energy consumption is not a linear function of the number of simultaneous detections. As such, the network user must be aware of the compromise between reliability and energy economy, achieved by selecting the number of nodes per cluster that perform event detection duties, μ.
When studying the Radius strategy, this behavior gets intensified. In Figure 10, several event detection radiuses are set by modifying the threshold value at the input of the sensors of the nodes; that is, for achieving a detection radius of 5 m, the threshold is set to a higher value and for the 20 m radius it is set to a lower value.

Network activity for a nonpriority environment with uniformly distributed events with radius of detection R.
From this figure it can be inferred that, by increasing the threshold value, the detection radius decreases, so the probability that an event is overlooked is higher. On the other hand, as the threshold value gets lower, the event detection radius increases along with the probability of generating redundant data. Also, the number of detected and successfully transmitted events is almost identical, which implies that packet loss probability is near to zero. Then, transmission probability is guaranteed, even when operating in environments with high rate of event occurrence.
6.2. Mobile Environments: Priority Disabled
In case that detections within the area are generated by movement or the presence of mobile objects (MO), a nonpriority environment is considered. In this scenario, object position or status is transmitted by means of the RA protocol and environmental parameters are reported during the collision-free TDMA schedule. By using

Here,
For validation purposes, hitting time is obtained by simulation and (18), the error obtained when comparing both results, is more than acceptable as shown in Figure 11; then, both methods are considered suitable for calculating hitting time for the selected environment.
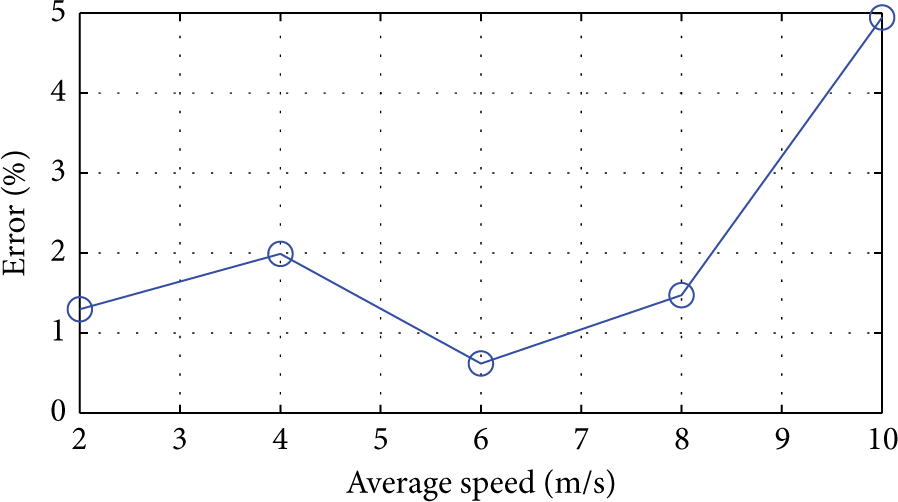
Error percentage when comparing mathematical and simulation results for the hitting time in a network with one mobile object (MO) with detection radius
Building on this, expected hitting time may be calculated for several values of the average speed of the MO,

Expected hitting time for different
As expected, hitting time decreases as the mean speed of the objects,
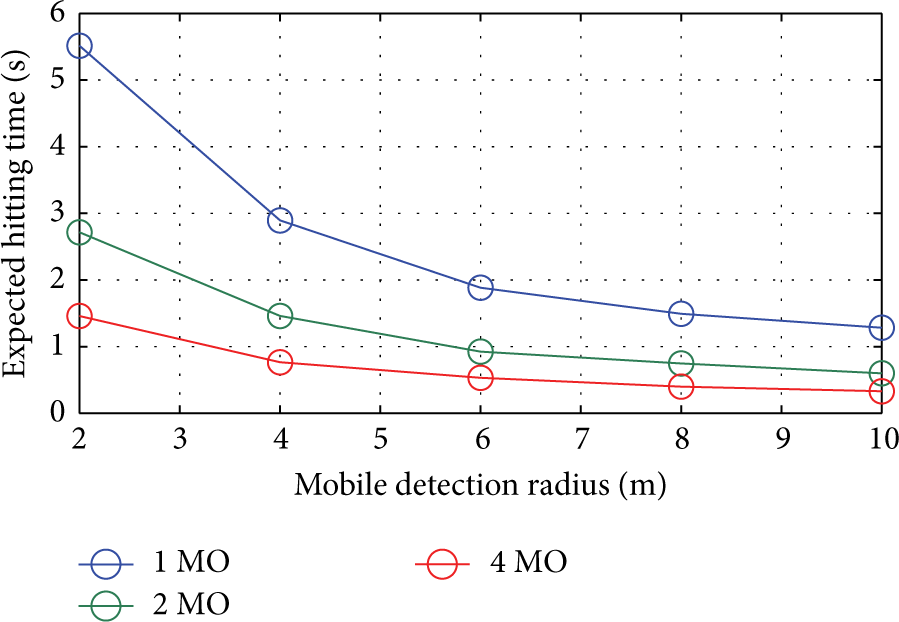
Expected hitting time when considering a number of mobile objects (MO) and detection radiuses with
This behavior occurs due to the fact that when a node has detected an event it is unable to perform a second detection until the event packet has been successfully transmitted. Thus the rate of detection within the simulated network was decreased slightly, an scenario not considered by (18). Building on this, an equation for obtaining the expected hitting time for n mobile nodes is left for future work and, thus, results for environments considering several MOs are obtained by simulation.
Figure 14 shows that as detection radius increases, the detections per second increase, which implies a proportional increase in energy consumption, given that the number of simultaneous detections per cluster remains constant. As the probability of a node entering the detection radius of several nodes in the exact same time slot is significantly low for the given scenario, detections are considered to be simultaneous if a detection is performed while any other node in the cluster is attempting the transmission of a previously detected MO.

Detections per second when considering a number of mobile objects (MO) and detection radiuses with
Nevertheless, as Figure 15 shows, a significant increase in detections per cluster is not observed; in fact, as more mobile objects are added, this value decreases slightly. This occurs due to the fact that as more objects transit the area, the probability that more than one MO is within the detection range of a node increases. But also, as MOs are added to the network, detections are less spatially concentrated and more spread throughout the network.

Detections per cluster when considering a number of mobile objects (MO) and detection radiuses with
It can also be seen from Figure 15 that, as the average speed of the MOs increases, the detections per cluster increase. However, that increase is not significant, which also implies that average report delay is not expected to increase.
This can be seen in Figure 16, where average report delay for an environment containing a single MO is considered.
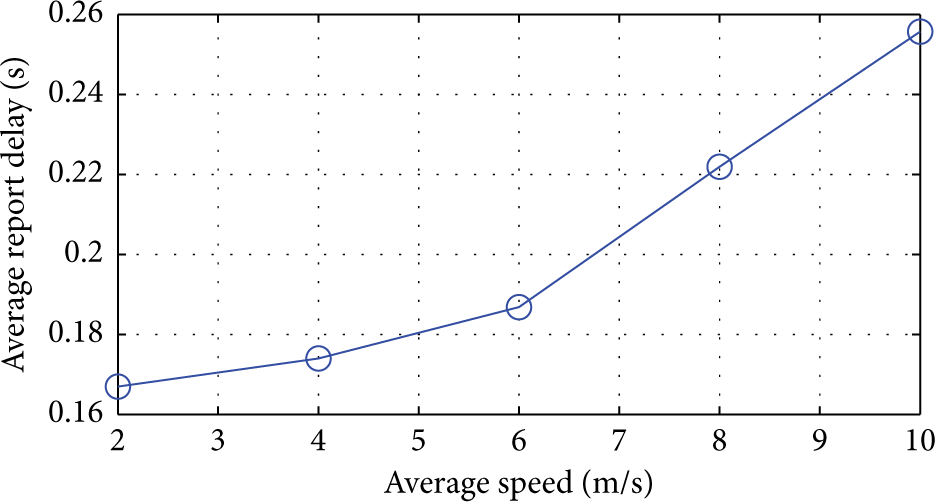
Average report delay for an environment with one mobile object for several values of
As stated above, adding MOs to the network does not increase simultaneous detections, so average report delay is expected to remain constant for these scenarios. While report delay is not significantly affected by neither detection radius nor average speed nor the number of objects inside the area of interest, other QoS parameters may be affected, such as the energy consumption in the system.
Due to the fact that RA transmissions are high energy consuming, an increase in the rate of detection of the events would imply an increase in power consumption; this behavior is shown in Figure 17.
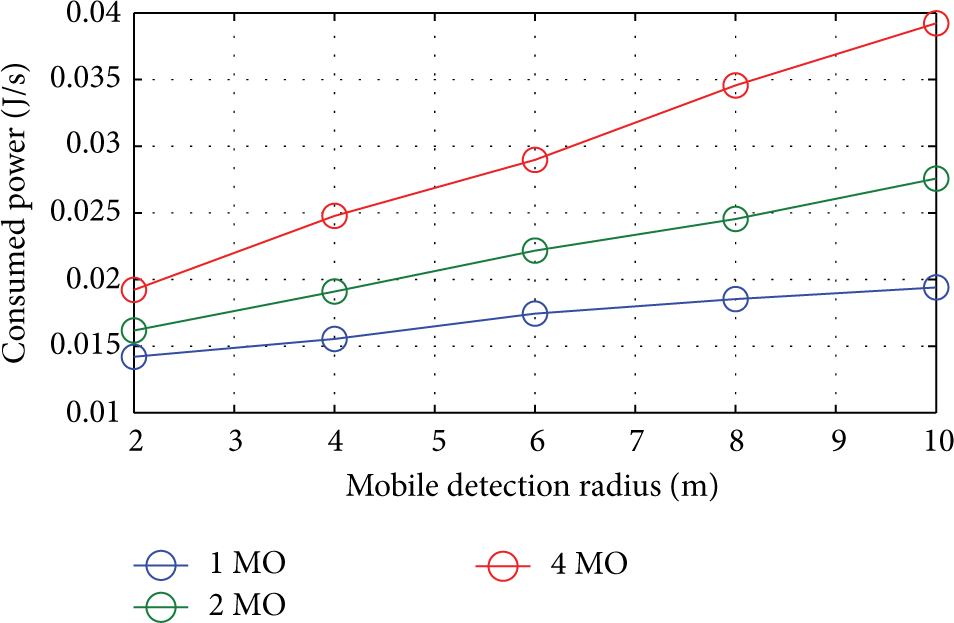
Energy consumption for the Steady Phase when considering a number of mobile objects (MO) and detection radiuses with
It can also be observed that, in this case, energy consumption is mostly affected for scenarios with higher detections per second, rather than detections per cluster. Therefore, by increasing the rate of detection, the consumed energy per time unit is also increased. Building on this, the network operator has to achieve a balance between detection accuracy and low energy consumption, which may be controlled by carefully selecting the threshold value for detection, which in turn leads to achieving the desired detection radius, R.
6.3. Static Environments: Priority Enabled
As reviewed previously in this section, randomly distributed events that affect several nodes simultaneously tend to affect report delay and energy consumption (as a result of increased rate of detection/transmission) significantly. Hence, assigning priority to certain packets is expected to enhance the performance of the system. In this work, priority is enabled by assigning different transmission probabilities, namely,
In Figure 18, it can be seen that the lowest overall delay is achieved when selecting relatively low values of the transmission probability: near
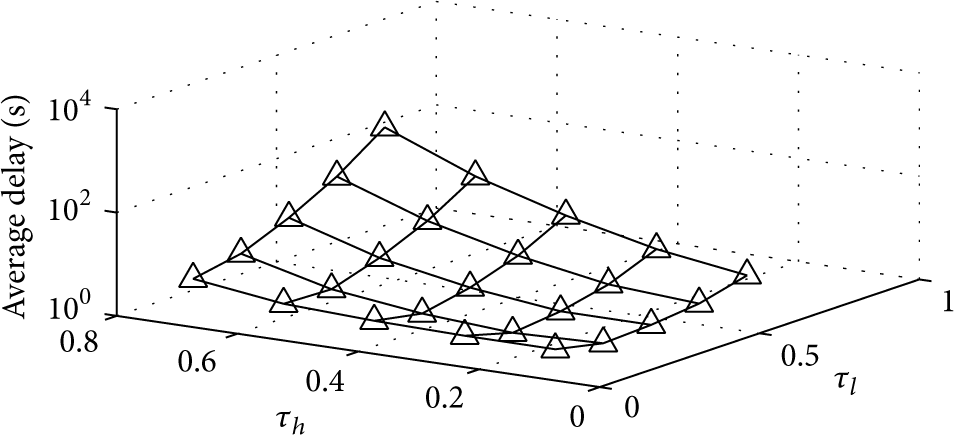
Average report delay for

Delay improvement for high priority packets for several transmission probabilities.
In order to evaluate whether the selected priority handling scheme benefits the transmission of important packets under several conditions, average report delay for high and low priority packets has been obtained for different values of M and N and is shown in Figure 20.
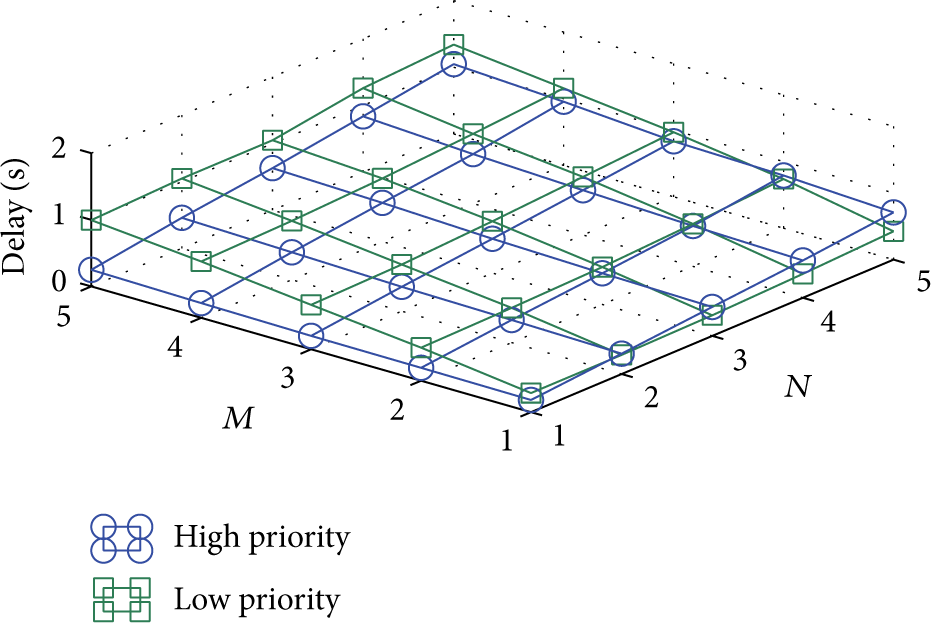
Average report delay for high and low priority packets for different N and M using the Markov model.
As expected, delay for high priority packets is significantly improved when compared to low priority packets. It is worth noting that average report delay is computed as the time it takes for the transmission of every packet corresponding to each priority level within a cluster, which is the reason for high priority packets experimenting higher delay when

Error percentage for average report delay between the Markov model and simulator.

Energy consumed for several transmission probabilities.
It is observed that unless these values are set extremely high, that is,
Delay improvement for high priority packets in a concentric detection scheme.
In this case, it is considered that nodes near the event center (selected by means of a bidimensional uniform random variable) are assigned high priority. Specifically, detections within
6.4. Multievent Environments: Priority Enabled
Results shown in previous sections suggest that energy consumption is significantly affected as detections per second increase. This is specially true when
Figure 24 shows the average expected (mathematical) and obtained (simulation) detections per second for high priority events. Also, low priority detections per second are shown. As observed, specially as average speed increases, low priority events interfere with the detection of the mobile object, leading to loss of information. However, as Figure 25 shows, high priority packets do not experiment a significant increase in report delay, validating the proposed priority model.
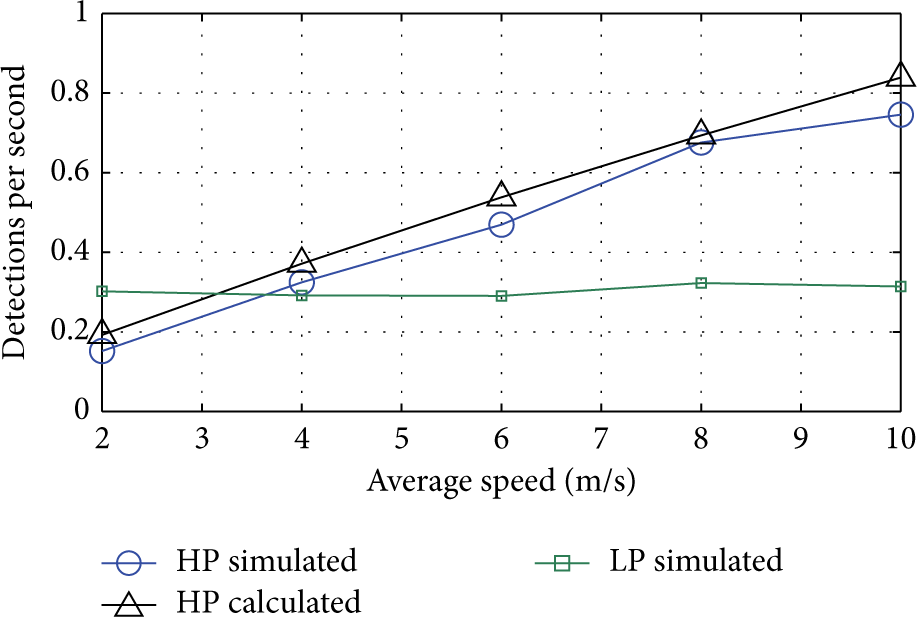
Detections per second for high and low priority packets in a hybrid environment.

Average delay for high priority packets in a hybrid environment.
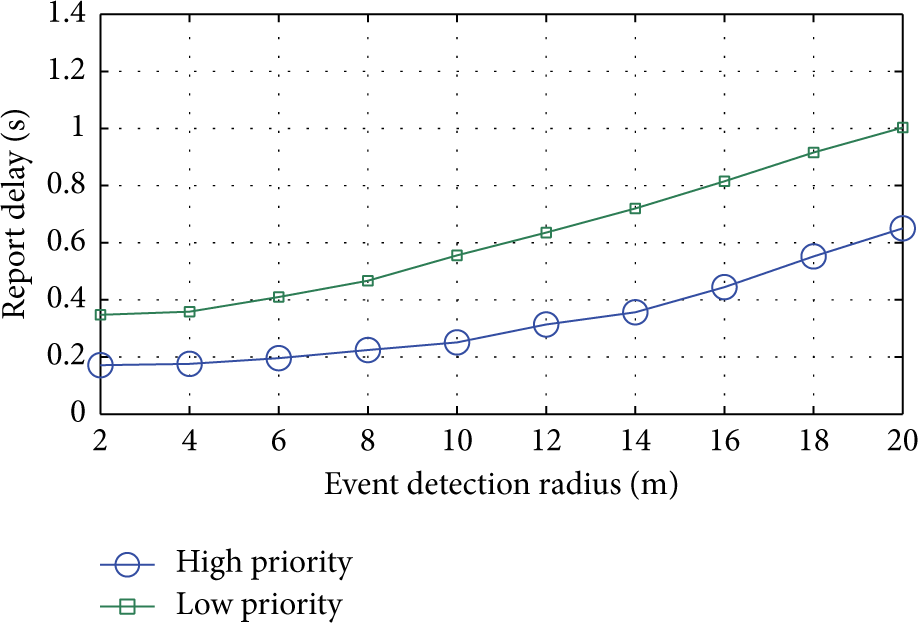
Finally, an experiment is conducted by increasing detection radius and defining
This can be seen in Figure 26 where several mobile detections are ignored due to the fact that the sensing node is in a busy state (where the node is trying to send information related to a low priority detection).

Detections per second for high and low priority packets in a hybrid environment.
Despite the fact that the number of detections increases, delay in high priority packets (Figure 27) tends to behave in a similar manner compared to the previous experiment, where low priority detections were defined constant.

Average delay for high priority packets in a hybrid environment.
This is due to the fact that the probability for a mobile object to be detected inside a busy section of the network, for example, a cluster, is significantly low. Thus, report delay for high priority mobile events is nearly independent from the occurrence of randomly distributed events.
On the other hand, it is likely that some mobile detections are ignored due to the fact that low priority events trigger the transmission of several nodes and while transmission attempts are performed, these nodes are considered unable to detect any other events. It is worth noting then that, in this scenario, important data is lost.
7. Conclusions and Future Work
In this work, WALTER, a nonpreemptive hybrid protocol for WSN, is studied by means of a proposed Markov model and a discrete event simulator. The aforementioned protocol improves network lifetime and energy consumption for low rate event detection environments. Throughout this study, WALTER performance is analyzed under several conditions by defining a wide variety of environments. For each environment, the proposed Markov model may be used to accurately obtain the average report delay and the energy consumed per event transmission. Some key aspects regarding the performance of WALTER are as follows.
(i) Fixed Event Detection Strategy. It is observed that average report delay increases in a nonlinear fashion along with the number of simultaneous detections. By selecting the Fixed strategy, average report delay and energy consumption may be calculated by means of a Markov model similar to the one presented. However, as N and M represent the number of CMs set to perform event detection duties, the calculated QoS parameters correspond to scenarios in which events affect the clusters entirely. Whenever an event affects certain section of the cluster, transmission is triggered in a lower number of nodes. This causes event report delay and energy consumption to adopt lower values than calculated. So, the presented performance analysis for the Fixed strategy represents the maximum values that can occur for average report delay and energy consumption. In case the network user requires to calculate the exact values for those parameters, the described Average and Radius strategies may be used. However, it implies that the user must be aware of the probability distribution function of the detecting nodes, which is not straightforward to calculate. Furthermore, given the worst possible performance for a given scenario meets the monitoring needs of the user, performance is guaranteed throughout the operation of the network.
(ii) Radius Event Detection Strategy. As mentioned in previous sections, the studied environments such as concentric detections are modeled in such a manner that when an event occurs, every node involved in the detection process switches to transmission mode simultaneously. This behavior can de found in some military or industrial applications. On the other hand, when considering events that spread slowly within the network, high priority transmissions are expected to occur before low priority detections, hence lowering congestion within the clusters and enhancing performance.
(iii) Mobile Environments. When operating in this type of environments, detections per second can be calculated in order to predict whether an increase in energy consumption is expected. During this study,
(iv) Multievent Environments. The equation used to calculate
(v) Future Work. Despite the extensive analysis performed during this study, some issues are left for future work, such as developing an algorithm for adequately selecting the reporting nodes in the Fixed strategy for enhancing energy consumption and event report delay while maintaining event report probability. As stated above, (18) may be used to accurately obtain hitting time in mobile-only environments containing a single MO. A new equation may be proposed to adequately model this parameter in mobile environments with several MOs or in multievent environments. For this, the equation must consider report delay and the probability of the MO entering to zones affected by other events. However, this is not straightforward.
Footnotes
Parameters
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Acknowledgments
This work was partially supported by CONACyT under Project 183370. The research of Vicent Pla has been supported in part by the Ministry of Economy and Competitiveness of Spain under Grant TIN2013-47272-C2-1-R.