
Abstract
The fifth-generation (5G) wireless networks are generally anticipated to be heterogeneous, consisting of macro cells, wireless local area networks, device-to-device networks, ad hoc networks, and so forth. The spectrum occupancy varies on spatial and temporal basis. So sensing the variation of spectrum occupancy and informing the resource scheduler can optimize the utilization efficiency of spectrum. Especially for deployment of cognitive radio in 5G, spectrum sensing is regarded as a key technique. In this work, we study the cooperative sensing in 5G heterogeneous wireless networks with a centralized control module. By formulating this cooperative sensing problem as a sequential binary hypothesis test problem, the number of unnecessary data samples and the associated cost is substantially reduced, with guaranteed detection precision. We develop a cooperative sequential detection algorithm, in which multiple geographically diverse sensors are sequentially set up to measure and transmit measurement results on demand. Furthermore, we consider different sensor sampling schemes to address the cost-delay tradeoff problems and then propose a conditional mean activation and sampling algorithm, in which the number of required samples is predicted based on the quality of the collected samples. The performances of different sensor sampling schemes are demonstrated under different sensing environments.
1. Introduction
Radio signal detection is a common problem in applications such as wireless sensor networks, radio surveillance, source localization, and cognitive radio. The 5G wireless networks are generally anticipated to be heterogeneous [1, 2], which can consist of macro cells, wireless local area networks (WLAN), vehicular networks, ultra-dense networks (UDN), device-to-device networks (D2D), ad hoc networks, and so forth. The spectrum occupancy of these networks varies on spatial and temporal basis. Therefore, sensing the radio environment is beneficial for enhancing the utilization of spectrum. Especially for deployment of cognitive radio in 5G [3–5], spectrum sensing is regarded as an essential approach. The cognitive users (CU) need to collect sufficient information about the spectrum occupancy to opportunistically access the spectrum holes and avoid interfering primary users (PU).
There are a variety of methods in the literatures on radio signals sensing, including energy detection, feature detection, and coherent detection [6]. Framing the detection problem into a binary hypothesis test, the signal detection framework typically requires the collection of a number of samples for computing a test statistic against a threshold. Normally, the larger number of samples provides more accuracy in detection outcome. To guarantee sufficient samples, the detector often takes redundant observations, leading to more energy consumption. In addition, when sensors need to report the samples or their processed versions, more transmission cost is caused in terms of both energy and spectrum usage. Besides, processing capabilities for higher sampling rate increase hardware cost of sensors. Hence, there is a clear tradeoff between detection cost and detection precision.
We consider the utilization of sequential detection [7] as an effective tool to handle the tradeoff between the cost and the precision in cooperative sensing of radio signals. In sequential detection, the samples are taken sequentially to perform the hypothesis test. Instead of setting the fixed number of samples before sensing, only one more sample is taken at a time. As soon as we reach a confident detection conclusion, we stop collecting additional samples, thereby substantially reducing the number of unnecessary data samples and the cost associated with them.
There have already been studies on sequential detection in various scenarios. In [8, 9], a sequential detection framework was applied for the detection of emerging PU in cognitive radio networks, considering single sensor without cooperation. Li et al. extended their work to collaborative spectrum sensing in [10, 11]. Jayaprakasam et al. [12–14] presented a series of works on sequential detection-based cooperative spectrum sensing. The sensors were required to not only take samples but also make calculations, which consumed considerable energy and hardware cost. Hesham et al. [15] proposed a distributed spectrum sensing scheme where all distributed sensors took observations and calculate log likelihood ratios (LLRs) of the observations. Then all the sensors were ranked in descending order of LLR magnitude. Only a few of the sensors ranked in the front transmitted their calculated LLRs to a fusion center for sequential test. Chin and Chuang [16] applied sequential detection in surveillance sensor networks, in which the sensors periodically reported their local decisions to a fusion center. Yilmaz and Wang [17] proposed a novel approach that the random overshoot above or below the sampling thresholds was proportionately encoded into delay, during which the sensors waited to transmit their processed samples. It is noticed that, in the above works, all sensors were required to make observations, although not all of the observations were necessary [15, 17].
In this paper, we study the cooperative sequential sensing problem of radio transmission in 5G wireless networks with a centralized control module (CCM). CCM collects samples from multiple sensors and performs the binary hypothesis test. Once CCM calculates a statistic, it will first decide whether or not the current statistic is reliable before requesting additional samples from one or several sensors. To address the issue of cost-precision tradeoff, we propose a cooperative sequential detection algorithm to determine whether or not to take additional sensing samples and how many additional samples we may wish to acquire based on the cost-precision tradeoff considerations. In the proposed algorithm, the sensors are in hibernation until activated by a control signal from CCM, through which approaching the sensors' energy consumption is further reduced. Through the sensors cooperation based on hibernation, we can not only combat measurement noise, shadowing, and multipath fading effect, but also improve fairness of energy consumption across the multiple sensors by averaging their run-time. Such fairness is particularly important in networks consisting of low-cost devices with limited energy.
We also take into consideration the detection delay as a result of sequentially requesting additional observation and transmission. Because a delayed detection of radio signal may lead to interference of the signal's transmission and postponement of access, it is a common objective of most sequential detection approaches to minimize detection delay. As detection delay is affected by how sensors are activated to make observations and transmissions, our investigation of cooperative sequential detection algorithms considers various sampling schemes and their impact on the cost-delay tradeoff. This cost-delay tradeoff can be improved if we can predict the number of required samples and activate corresponding sensors based on the quality of the accumulated samples. Our work proposes a conditional mean activation and sampling algorithm as an option to handle the cost-delay tradeoff.
In this work, the main contributions are as follows: (1) a cooperative sequential detection algorithm was proposed for energy efficient cooperative sensing; (2) different sensor activation algorithms and their cost-delay tradeoff were analyzed; (3) a novel sensor activation and signal sampling algorithm by predicting the number of required samples was proposed to improve the cost-delay tradeoff.
This paper is organized as follows. Section 2 describes the system model and formulates the cooperative sequential detection problem in radio sensing. Section 3 proposes a cooperative sequential detection algorithm and its detection of radio signal transmissions. The detection cost was analyzed in Section 4 together with the cost-benefit of various sampling schemes, especially a novel sensor activation and signal sampling algorithm. Section 5 presents the numerical results and analysis of the proposed algorithm given various sampling schemes.
2. System Model
As shown in Figure 1, the 5G wireless network is heterogeneous based on multi radio access technologies (RAT). To address capacity and data rate challenges in 5G, especially to improve capacity at critical locations, control (C) and user data (U) planes are desirable to be split [1]. In such a C/U-plane split architecture, macro cells provide coverage, while small cells like UDN, WLAN, and so forth provide localized capacity. Centralization of C-plane is implemented in CCM, which can be deployed as a physical entity or a logic function module. It is an option to locate the CCM at the macro cell based station as a physically independent module. The detection enables CCM to construct global resource map and adapt network policies involving issues such as radio access, resource allocation, and multinode cooperation.
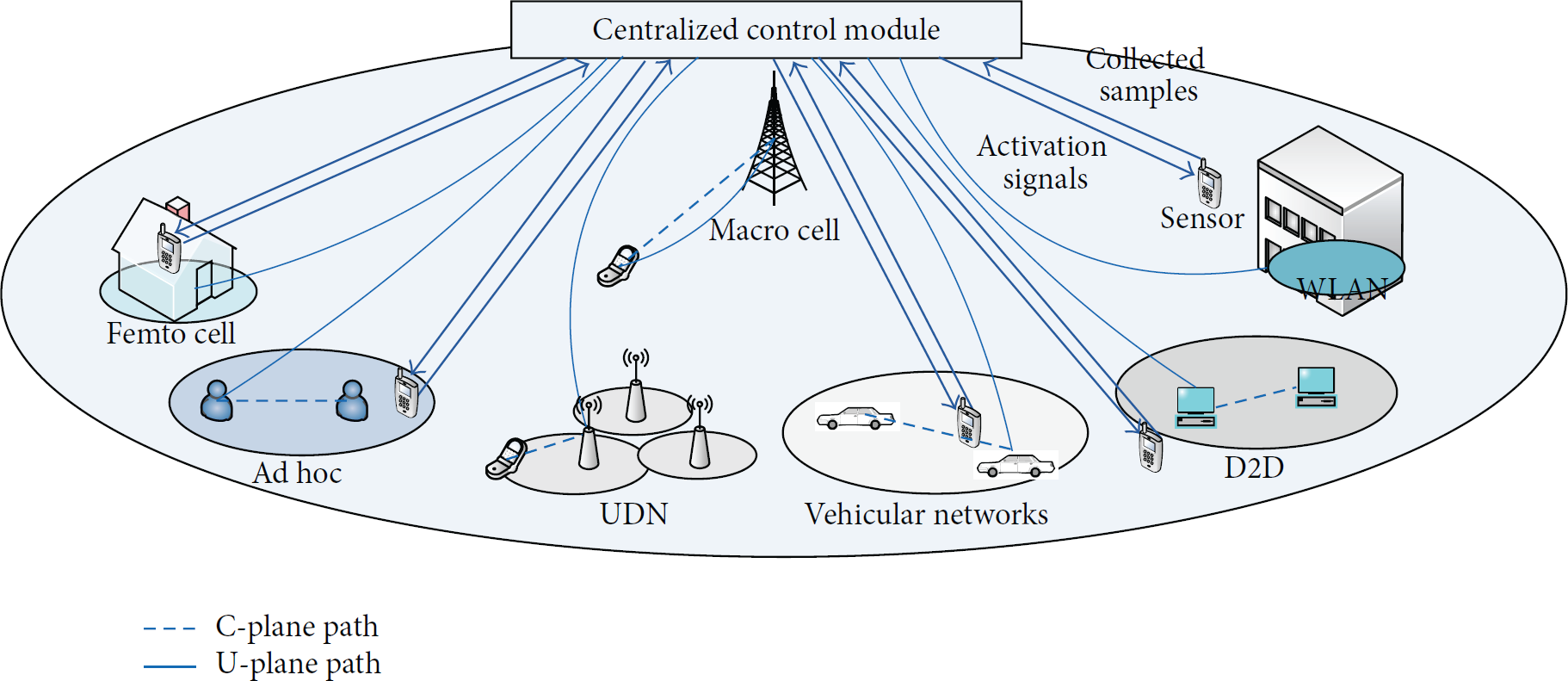
Sensors deployment and signaling in 5G heterogeneous wireless networks with CCM.
The sensors are geographically distributed, in the form of dedicated equipment or sensing components integrated in various terminals. Each sensor sets hibernation as its default mode and makes observations upon reception of an activation control signal from CCM. CCM collects samples from multiple sensors and performs the binary hypothesis test. Once CCM calculates a statistic, it will first decide whether or not the current statistic is reliable before requesting additional samples from one or several sensors. Based on the centralized management of the multi-RAT networks, CCM probably possesses prior knowledge of them and performs the hibernation and activation scheme more efficiently.
Under the scenario shown in Figure 1, K sensors are geographically distributed. Each sensor k,




3. Cooperative Sequential Detection
In this section, a cooperative sequential detection algorithm (CSDA) is proposed for sensing radio transmission. First, we introduce the decision rule of CSDA. Then CSDA is represented in detail.
3.1. Decision Rule of Cooperative Sequential Detection Algorithm
Based on the system model, the observed sample









3.2. Cooperative Sequential Detection Algorithm
In CSDA, all sensors hibernate initially. CCM calculates a lower threshold a and an upper threshold b according to the system requirement, that is, the missing probability
The algorithm is summarized in Algorithm 1. In Algorithm 1,
Algorithm 1 (cooperative sequential detection algorithm (CSDA)).
All K sensors initially hibernate. Let Let Let Let Initialize Rank the K sensors according to Increment Calculate
Let the
Update
CCM receives these samples and updates
CCM makes a decision according to
If
If
Make a final decision on the detection
4. Activation Algorithms and Considerations
In this section, we analyze the detection cost and define its critical factors. Then we discuss the cost-benefit of various sensing algorithms with different numbers of activated sensors. A novel sensor activation and signal sampling algorithm is proposed, aiming at activating an appropriate number of sensors based on the quality of the samples. The proposed algorithm is described in detail, as well as its derivation.
4.1. Detection Cost
The design of sequential cooperative signal detection is motivated by its ability to reduce the cost associated with unnecessary sensor activation, signal sampling, and sensing data transmission. On the other hand, sequential sensor activation may lead to extra delays in acquiring necessary samples. Furthermore, reducing the number of samples also can result in loss of detection accuracy. Clearly, there is a tradeoff between detection cost and detection accuracy.
Firstly, a comprehensive cost function considering the tradeoff is defined. In the function, the detection cost consists of cost resulting from detection error, energy usage during sampling, energy usage during sample transmission, and detection delay. Without loss of generality, we make the following assumptions:
T: stoppage time; that is, no more sample is taken after the Tth iteration: At the stoppage time T, the conditional detection cost is
where where The detection cost without considering detection error is



For one specific system with stationary coefficients,
4.2. Tradeoffs in Activation and Sampling
The number of samples
For example, in the classic sequential sensing algorithm, the sensors are activated one by one; that is,
To shorten detection delay, the classic sequential detection algorithm can be improved by activating more than sensors and taking more samples each time. In order to exploit multisensor diversity and improve fairness of energy consumption across the multiple sensors, we prefer activating multiple sensors to take an assigned number of samples simultaneously instead of activating one sensor at a time to take multiple samples. A conditional mean activation and sampling algorithm (CMA) is proposed to solve the problem. The objective of CMA is to activate an appropriate number of sensors each time based on the obtained samples. In CMA, given the knowledge of the acquired samples, the conditional mean of the number of essential samples for reliable sequence detection is calculated. The proposed CMA will be discussed in detail in the following subsection.
4.3. Conditional Mean Activation and Sampling Algorithm (CMA)
In CMA, the fusion center calculates the average value of the number of essential samples, which are required to make a final decision. At time t, the acquired samples





At time t, if the collected samples
As discussed earlier, for the specific problem in the system model, the sufficient statistics of






Algorithm 2 (CMA-CSDA).
All K sensors initially hibernate. Let Let Let Initialize Rank the K sensors according to Increment Update Calculate
If
Calculate
Update
Perform steps (3), (4), and (5) of Algorithm 1 successively.
5. Numerical Results and Analysis
In this section, the cost-delay tradeoff and the detection performance of the proposed cooperative sequential detection algorithms with various activation and sampling schemes are evaluated. As mentioned before, the detection cost associated with samples number includes energy for making observations, energy for transmission, spectrum usage for transmission, and hardware cost of sensors. In the simulation, three activation and sampling algorithms are compared:
classic sequential sensing: full activation sensing: CMA-CSDA:
In the three algorithms, the numbers of sensors to be activated each time
5.1. Parameters Setting
The simulation tests
Main simulation parameters.

5.2. Numerical Results and Analysis
The performance of detection algorithms with various activation and sampling schemes can be shown in terms of the number of samples
Figure 2 shows the detection probability
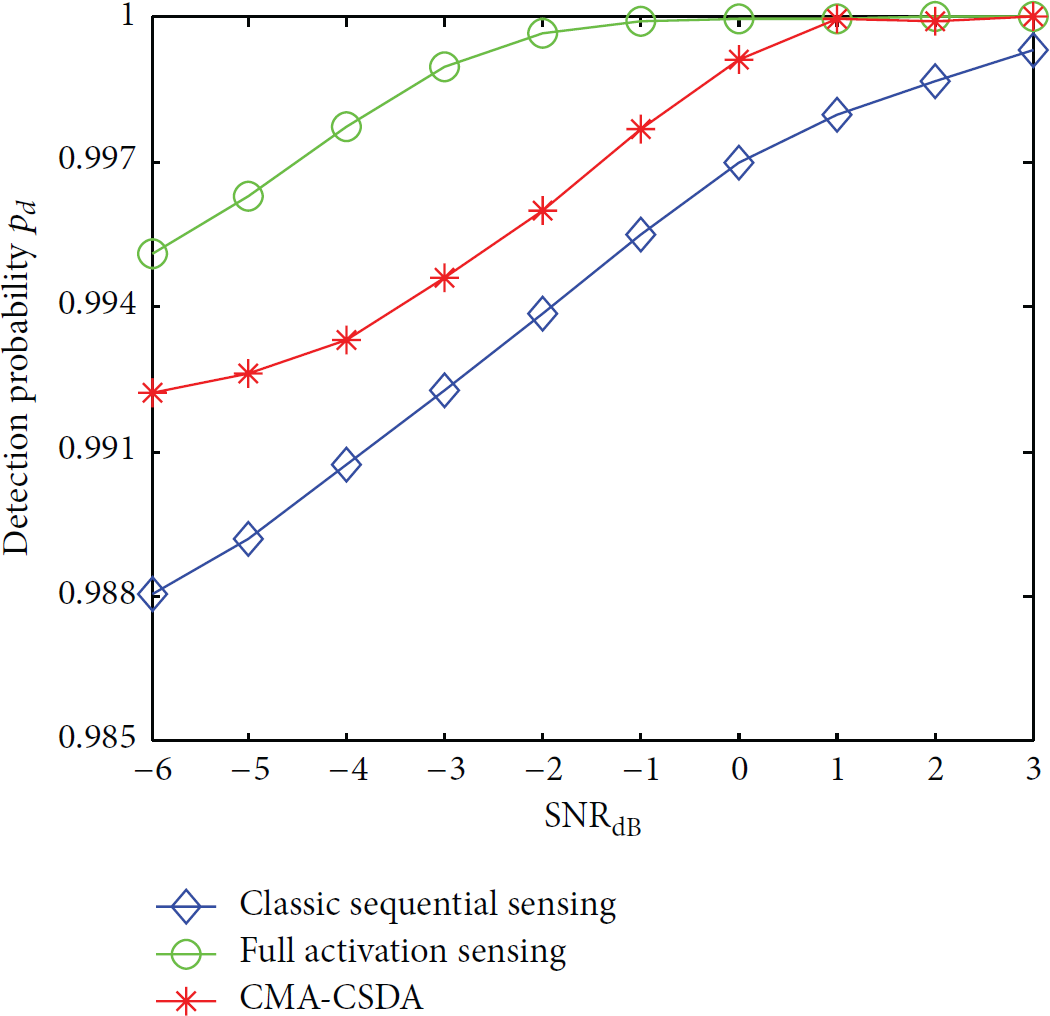
Detection probability
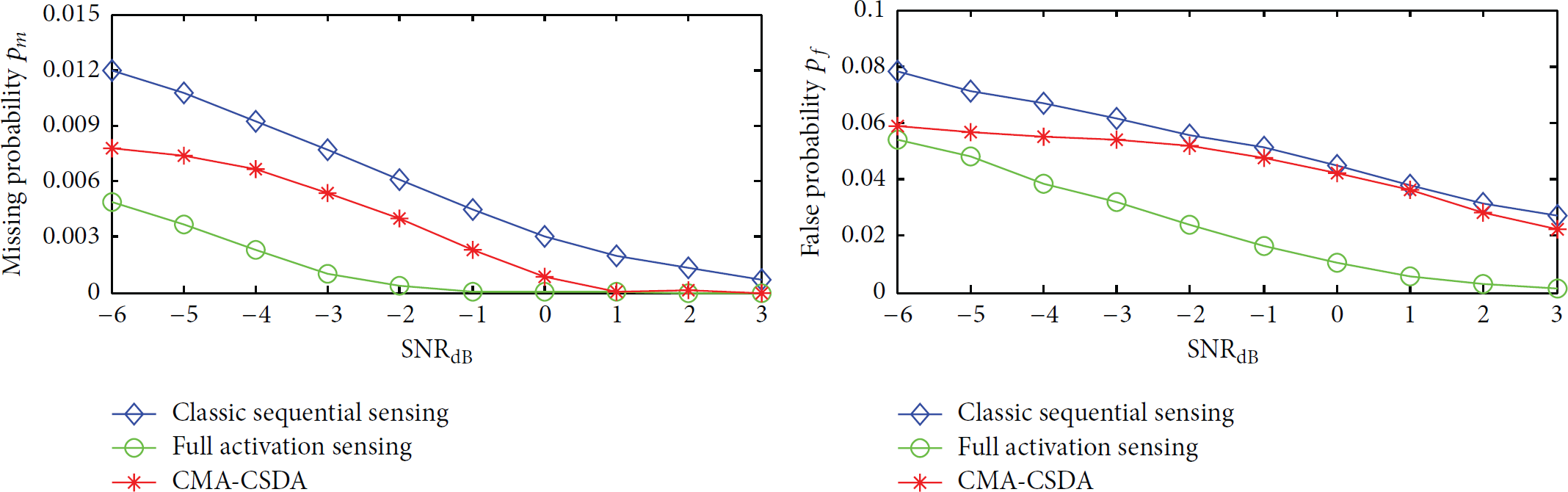
Missing probability
Figure 4 illustrates the number of samples
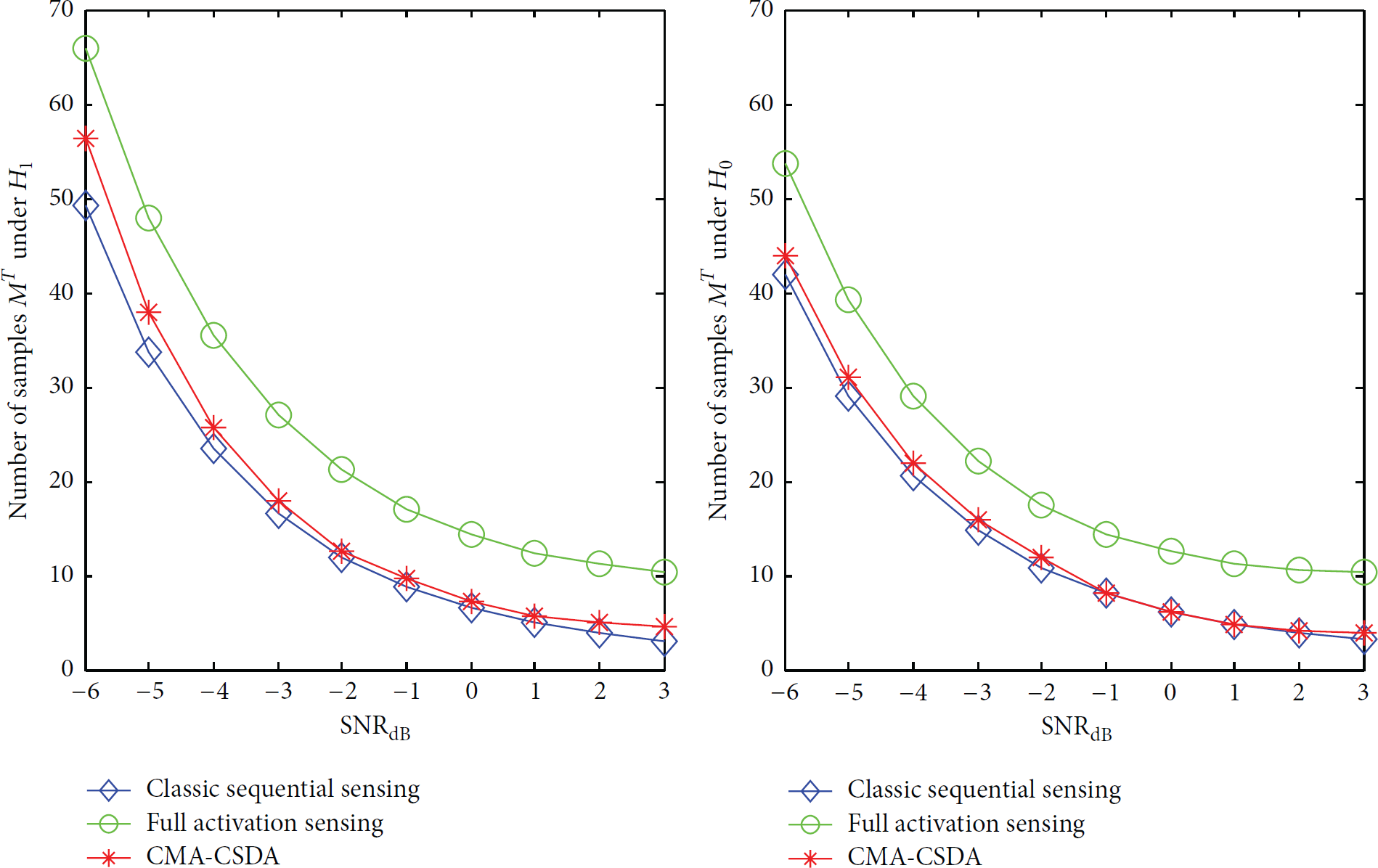
Number of samples
Figure 5 shows the stoppage time T, which represents the detection delay. T of the classic sequential sensing algorithm is the largest, in which the stoppage time is equivalent to the number of samples

Stoppage time T, when
Combined with Figures 3, 4, and 5, we find that both the detection performance and the detection cost of CMA-CSDA have median values. With satisfied detection precision, the number of samples
6. Conclusion
In this work, we considered the detection of radio signal transmissions in 5G wireless networks with multi-RAT. The C/U-plane split architecture with a CCM was well suited for implementing the proposed cooperative sequential detection algorithm. With detection precision guaranty, the number of redundant samples and the cost associated with them was reduced by adopting sequential detection and hibernation scheme.
We also investigated various activation and sampling schemes by analyzing the tradeoff between detection cost and delay. To optimize the cost-delay tradeoff, we proposed a novel sensor activation and signal sampling algorithm, in which we activated the sensors to make observations according to the conditional mean number of necessary samples and compared it with the classic sequential sensing algorithm and the full activation sensing algorithm. Through the analysis, it is concluded that (1) the target detection performance can be satisfied for all of the cases. (2) To measure the detection cost without consideration of detection error, the critical factors of detection cost were the number of samples and the stoppage time. The classic sequential sensing algorithm requires the least amount of samples. Hence, it is the most energy-efficient activation and sampling scheme. The full activation sensing algorithm is fastest with smallest stoppage time. With contented detection precision, both the number of samples and the stoppage iteration of the proposed CMA-CSDA have median values. Furthermore, both the above values were closer to the smallest one among the three algorithms. (3) It was feasible to adopt the heuristic scheme to achieve less detection cost with different signal quality and system parameters.
In short, the main contributions are (1) development of a cooperative sequential detection algorithm for energy efficient cooperative sensing; (2) analysis of different sensor activation algorithms and their cost-delay tradeoff; (3) proposal of a novel sensor activation and signal sampling algorithm for the cost-delay tradeoff in sequential sensing.
However, it is still a challenge to guarantee sensors detection precision in practical, for it depends on the topology of the sensor deployment and the location of the signal source. Therefore, the deployment of sensors and the corresponding hibernation and activation approach should be designed based on specific network scenarios and real-time spectrum scheduling adapted by CCM. We hope to explore specific methods for these issues in the future work.
Footnotes
Appendix
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Acknowledgment
This work is supported in part by the National High Technology Development 863 Program of China (2014AA01A707).