
Abstract
The estimation of the localization of targets in wireless sensor network is addressed within the Bayesian compressive sensing (BCS) framework. BCS can estimate not only target locations but also noise variance of the environment. Furthermore, we provide adaptive iteration BCS localization (AIBCSL) algorithm, which is based on BCS and will choose measurement sensors according to the environment adaptively with only an initial value, while other frameworks require prior knowledge such as target numbers to choose measurements. AIBCSL suppose that environment noise variance is identical in interested area in a short period of time and change measurement numbers until terminal condition is reached. To suppress noise, we optimize estimation result by energy threshold strategy (ETS), which takes that transmit energy of noise focused on single grid is much lower than signal into consideration. And multisnapshot BCS (MT-BCS) will be explained and lead to a good result in low SNR level situation.
1. Introduction
Wireless sensor network (WSN) has enjoyed tremendous popularity in the last decades [1, 2]. Around it there are lots of subjects. Estimating the localization of target in wireless sensor network is one of the hot topics [3]. Localization subject in most of self-organization networks has experienced excited discussion in both single target environment [4] and multitargets [5] environment, although the location of target is known to sources in some situations which are merely for data aggregation or system management, such as networks based on industrial wireless communication protocol WIA-PA [6]. Wireless network localization often appears in smart applications or tracking system such as road traffic monitoring, health monitoring, or military target tracking, which have enjoyed tremendous popularity. State-of-the-art paper gives to the interested reader several effective approaches proposed in the last decades for localization in WSN. The measurement techniques in wireless sensor network localization can be classified into three categories [3], which include angle-of-arrival estimation (AOA), distance related measurements, and RSS profiling techniques. However, the custom methods lead to poor performance in multitargets situation.
In this paper, we will introduce a novel method to wireless sensor network localization. We assume that target numbers are far less than the number of grids utilized to represent the locations of the targets. Thus target locations could be considered as sparse signal. We will consider using Bayesian compressive sensing (BCS) standpoint to solve the localization problem. BCS originated from custom compressive sensing (CS), while it employs Bayesian formalism to estimate the underlying signal. CS theory has been applied to the area of localization or target counting in [7]. However, there is no information showing that BCS method has been introduced to wireless sensor network localization. BCS have many merits compared to custom CS: (i) BCS provides not only estimation result of sparse signal but also the error message (also be known as error bars); (ii) the BCS framework provides an estimate for the posterior density function of additive noise encountered when implementing the compressive measurements. BCS algorithm is better than many other custom CS algorithms such as OMP, L1-norm, and LASSO. Another attractive advantage is that BCS is suitable for developing adaptive method by using message from error bars. Our paper analyzes the basis of BCS and introduces an adaptive iteration BCS method later. Adaptive iteration BCS will improve the accuracy of localization compared to BCS, which can be seen in the simulation section. Except for that, our paper proposes an energy threshold strategy for postprocess and yields good effect.
The original work about CS is [8]. CS is a novel sampling theory that can reconstruct s sparse signal from a small number of measurements [9]. There are many methods for recovering signal from sparse signal, which include L1-norm in [8], OMP in [10], and LASSO in [11]. Reference[7] has applied CS to the area of target count and localization in wireless sensor network, that is, the first paper to rigorously justify the validity of the problem formulation of CS localization in wireless sensor network. Since CS is put forward, there are many branches from it, such as distributed CS and Bayesian CS. Reference [12] is a work of using distributed CS in wireless sensor network localization. Bayesian compressive sensing was proposed by Ji and Xue in 2008 [13]. Bayesian compressive sensing uses Bayesian standpoint to explain CS problem and has never been seen in the area of wireless sensor network. Reference [14] comes up with an adaptive Bayesian compressed sensing algorithm and applied it to wireless network. Reference [15] executed DOA estimate by Bayesian estimate in antenna array, which directly links measurements with signal directions and an energy method could been applied. Reference [16] utilized a hierarchical form of the Laplace prior to model the sparsity of the unknown signal and in that way provided a method to estimate the localization by BCS in this paper. From another perspective, CS is welcome in the area of multitarget localization [17].
The organization of this paper is as follows. In Section 2, we will first explain the basis of BCS and multisnapshot BCS. Localization model and adaptive iteration BCS algorithm is demonstrated in the second part of Section 2. Section 3 is our simulation work and Section 4 concludes merits and application scenarios of our method.
2. Materials and Methods
2.1. Bayesian Compressive Sensing
Compressive sensing (CS) theory implies that if a signal has a sparse representation by a certain basis then it can be recovered from fewer measurements than Nyquist sampling theorem. A signal



Equation (3) depicts the projection of sparse signal s and measurements y. If we can recover y of N dimension from s of M dimension, then less memory costs and calculation costs will be taken.
2.1.1. Single-Snapshot BCS-Based Sparse Signal Estimation (ST-BCS)
Bayesian compressive sensing (BCS) will recover y from Bayesian estimation standpoint. Because ε is a zero mean Gaussian random, the likelihood model of recovering y from s is


BCS provides a method to estimate s and even noise covariance by only a few measurements y through maximize posterior probability. In that viewpoint, posterior probability of s and





2.1.2. Multisnapshot BCS-Based Sparse Signal Estimation (MT-BCS)
To suppress the noise, take the relevant of more than one signal in a short period of time into account. Do W samples at W different times, and then



2.2. Location Sensing Formulation
2.2.1. Localization Model
First we divide localization area to be

Localization girds and index.
Energy attenuation [3] from ith grid to jth gird is

Combining (1) and (13),

2.2.2. BCS Based Adaptive Localization
Compared with custom CS method, BCS not only provides sparse estimation result, but also gives estimation of noise. In this section, we develop an adaptive BCS algorithm that will choose measurements adaptively for target localization in wireless sensor network. The algorithm assumes that noises in the interested area are consistent, which means that the variances of noise in anywhere of interested area are identical in a short period of time. Measurement numbers change based on the feedback of variances of noise by BCS estimation, until the inconsistency of variances comes to be a small value.
At the beginning, we choose
( ( ( ( ( ( ( (9) (10) Increase acquisition from the added (11) (12)
2.2.3. Strategy to Determine Targets
According to (19), s is K-sparse vector. BCS localization returns the energy result of all N locations. Random noise will increase error rate. In this section, we assume that energy of noise source is much less than true target, such that we can estimate targets’ location by energy threshold strategy (ETS) further [15]. More specifically, the entries of estimated sparse signal are sorted according to their energy,
( ( ( ( ( (
3. Results and Discussion
For the purpose of verifying aforementioned algorithms, simulations are executed in this section. Scale of interested area is 30 m × 30 m, in which we have grid size partitioned to be 1.0 m × 1.0 m. Such that there are

Because

Simulations are executed under noise situation, such that signal to noise ratio is defined:

3.1. BCS Simulation
Compared to custom methods, such as L1-norm [18], OMP [19], and LASSO [19], BCS is superior to them at certain circumstance. We will use CVX toolbox to implement L1-norm and SPAMs to implement OMP and LASSO in our experiments. In our simulation, each measurement is corrupted by Gaussian random according to (24). Energy threshold strategy is applied with

MLEs in single target (
Figure 3 shows the MLE result of multitargets localization by BCS and custom CS methods in different SNR level. Target number

MLEs in multitargets (
Figure 4 shows the TNE result in different SNR level for BCS method both in single target and multitargets. In single target (

TNEs vary with SNR using BCS method. Results are statistical data from 100 tests.
Figure 5 examines the MLE under different measurements. It demonstrates directly that BCS is better than other methods for that BCS has less MLE than others. Another clue of that figure tells us that MLE is decreasing along with the increasing of measurements. Figure 6 gives the TNE result of BCS method when measurements increase. The trend of TNE is decreasing along with the increasing of measurements, such that we can improve the localization accuracy through increasing measurements until satisfying our demand.

MLEs under different measurements. Results are statistical data from 100 tests.

TNEs under different measurements using BCS method. Results are statistical data from 100 tests.
The comparison between energy threshold strategy version and the not optimized version is depicted in Figure 7. After ETS optimizing, TNEs and MLEs are smaller than the not optimized version with MLE and TNE decline of about 50%. It proves that ETS is effective in improving accuracy of localization.

Comparison of MLEs and TNEs between ETS version and the not optimized version. M is initial value of measurements here. Results are statistical data from 100 tests.
3.2. AIBCSL Simulation
Adaptive iteration BCS localization algorithm could choose the number of sensors adaptively without user participating except for an initial value. The terminal condition used here for iteration is
Figure 8 shows that AIBCSL leads to less MLE and TNE. AIBCSL is superior to BCS. It almost yields perfect result (results close to zero) when SNR is greater than 20 dB. Figure 9 demonstrates visualizing that number of measurements changes adaptively according to environment with initial value

Compare AIBCSL with BCS. The initial value of measurement is 20 for

AIBCSL will lead to different measurements with the change of SNR. Results are statistical data from 100 tests.
Figure 10 is the iteration process of AIBCSL with different target numbers.

The convergence process of
With the changing of target numbers, AIBCSL choose measurements adaptively. Figure 11 shows the relationship between target numbers and measuments. Measurements at convergence are linear with target number, which means that AIBCSL could determine the measurements just according to the environment without needing any message about target numbers in advance. Figure 12 gives a snapshot of simulation process. In that figure, MLE of AIBCSL is better than OMP, L1-norm, and LASSO.

Converged measurements with the increasing of target number. Results are statistical data from 100 tests.
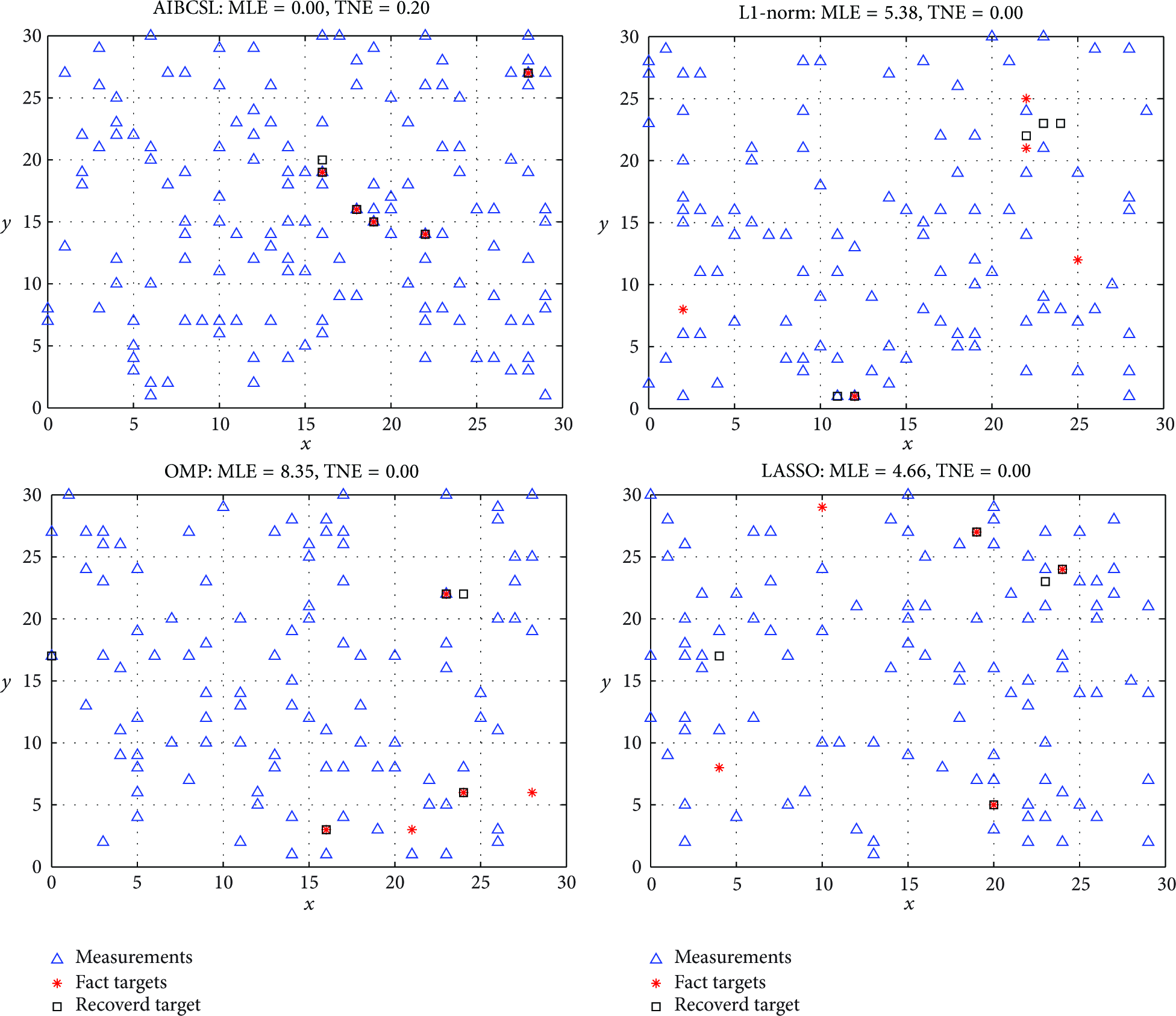
Snapshot of simulation. AIBCSL is compared with custom CS algorithms. Parameters:
3.3. Multisnapshot Simulation
In this simulation work we will combine multisnapshot with adaptive localization algorithm proposed in Section 2, which is called MT-AIBCSL for short in this paper. In this simulation, the terminal condition is

Compare MT-AIBCSL with AIBCSL with different SNR.
Because MT-AIBCSL takes full advantage of correlation of time domain, it suits the situation that the environment is not varied in a short period of time. An excellent choice is applying AIBCSL to real-time requirements and low correlation of time domain situations and vice versa.
4. Conclusions
In this paper, BCS is introduced to wireless sensor network localization and the results compared with custom CS are assessed. We then proposed AIBCSL and MT-AIBCSL to improve the accuracy of localization on the basis of BCS. AIBCSL take the assumption that noise variances are identical in the interested localization area in a short period of time. And simulation results proved that method is effective in noise environment. Advantages and limitations of AIBCSL and MT-AIBCSL have been analyzed in comparison with custom CS methods. The proposed adaptive methods have demonstrated the following superiorities.
Estimating target locations with noise variance being known at the same time. AIBCSL provides higher MLE and TNE than BCS and custom methods. And MT-AIBCSL is better than AIBCSL in low SNR level. There is no need for user to know the number of targets ahead of time and only an initial value of measurement is required by using AIBCSL and MT-AIBCSL.
Expect for that, an ETS provides performance improvement with almost 50% error decline, which is well suited for BCS framework and multitarget localization situation.
Footnotes
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Acknowledgments
The authors gratefully acknowledge the helpful comments from the reviewers, which have improved the paper very significantly. They also acknowledge the support of the National Natural Science Foundation of China (Grant no. 61173150/F020809) and National High Technology Research and Development Program of China (Grant no. 2014AA041801-2).