
Abstract
In wireless sensor networks (WSNs), connecting disjoint segments is significant for network restoration, especially in some mission critical applications. However, the variability of distances between disjoint segments has tremendous influence on relay nodes deployment. In fact, finding the optimal solution for connecting disjoint segments in terms of the number and positions of relay nodes is NP-hard. To address this issue, plenty of heuristics, such as STP-MSP (Cheng et al., 2008), MST-1tRN (Lloyd et al., 2007), and CORP (Lee and Younis, 2010) are deeply pursued. In this paper, we propose a distributed restoration algorithm based on optimal relay node placement (simply, ORNP). It aims at federating separated segments by populating the minimum number of relay nodes in a WSN that has suffered a significant damage. In addition, both of complexity and upper bound of the relay count for ORNP are explored. The simulation results show that ORNP performs better than STP-MSP, MST-1tRN, and CORP in terms of relay count and the connectivity of resulting topology.
1. Introduction
Wireless sensor networks (WSNs) are well-known by the significant advantage in monitoring space, such as battlefield surveillance, environment monitoring, and biological detection [1–3]. To accomplish such surveillance missions, a large amount of sensors are intentionally placed over a geographic area (called the area of interest,
Due to this special network architecture,

Segments discovery in a damaged
Some distributed algorithms in references [4, 5] have been designed to relocate some operational nodes such that the network becomes connected. However the algorithms are inappropriate to connectivity restoration for a severely damaged network.
Unlike those algorithms above, this paper aims to design an efficient algorithm that deploys the minimum number of relay nodes (
Our Contribution. This paper presents a polynomial-time algorithm, namely, We subdivide the area of interest A novel strategy for relay nodes selection among cluster members, with respect to the properties of Global Voronoi Coverage, is proposed to execute the prerestoration of a disconnected network. The We propose a geometrical center based algorithm that places relay nodes toward the center of mass of the polygon formed by the remaining disjoint segments to achieve the connectivity of the entire network.
The rest of the paper is organized as follows. Related work is covered in Section 2. The federation problem and Voronoi coverage based system model are described in Section 3. The algorithm
2. Related Work
There are two categories of heuristics pursued for federating segmented
Previous work on
To achieve higher connectivity [9, 10, 13], Tang et al. connected each sensor to at least two
Furthermore, all three networks, sparse mobile ad hoc networks, delay tolerant networks, and fragmented sensor networks, employ mobile nodes for data delivery. As a mobile node, it plays one of three roles: a collector that tours the sensors and carries their data, a base station that processes the data, or a relay that forwards data from one node to another [14, 15]. Furthermore, mobile nodes are deployed to link disjoint nodes as data forwarders [16] or to increase the lifetime of a network that consists of stationary sensors [17]. In [18], Senel and Younis designed a heuristic
3. Preliminary
In this section, we first give the notations and assumptions and then present the network model and the problem statement.
3.1. Notions and Terminologies
We use the following notations throughout the paper:
S: the set of
All sensor nodes deployed in
The Voronoi partition is a well-known geometric structure that has been applied to network clustering. For example, Voronoi trees [19] have been proposed to answer reverse nearest neighbour (
Definition 1 (see [22]).
Given a set S of n sites

Definition 2 (see [23]).
The Voronoi cell
Definition 3 (see [23]).
If every Voronoi cell
As shown in Figure 2(a), the black solid points and hollow points denote the predetermined nodes and ordinary nodes, respectively, while the rectangle represents the

Voronoi partition and global Voronoi coverage.
Since
Definition 4 (see [24]).
Given an arbitrary nonempty finite multiset P in
We denote
Definition 5 (see [24]).
Given an arbitrary nonempty finite multiset P in
We denote
Throughout this paper, we assume the entire area satisfies the global Voronoi coverage (see Figure 2(b)). The rationale is that if the sensing disks of some predetermined sensors can provide complete coverage of the entire area that implies the effective area surveillance, the area of interest is initially subdivided into clusters by Voronoi partition with respect to the positions of some predetermined sensor nodes (cites). Furthermore for each Voronoi cell (cluster), the corresponding sensor is nominated as the cluster head while the other sensors within the cell serve as cluster members; that is, there are six clusters
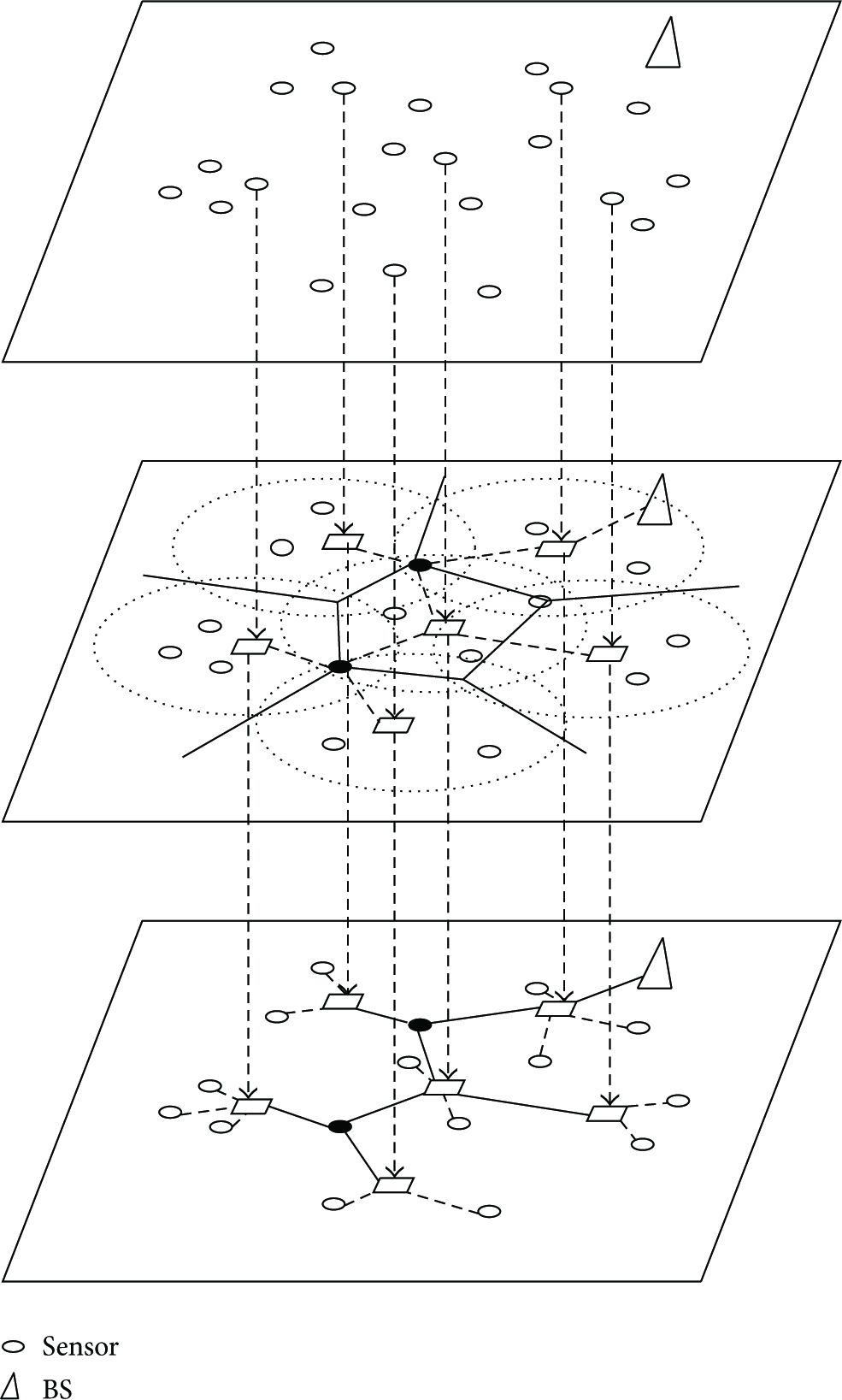
The virtual backbone constructed through Voronoi partition.
Note that although a sensor node could locate within two cluster heads’ sensing area, every sensor can only join one cluster and send all data toward its cluster head. The rationale for that is that two copies of the same data collected by a cluster member are possibly sending towards two cluster heads such that the redundant data could travel through the virtual backbone.
It is worth mentioning that it is pointed out in [25] that the specification of
3.2. Segment Federation Problem
In this paper, we only consider the disjoint
3.2.1. Representative Nodes Localization
For any segment
Then by simply observing the notification messages flooded in the segment, the border node that has most neighbors is selected as a representative. The rationale of the representative selection is that new
3.2.2. Relay Nodes Deployment
Throughout this paper, we assume relay nodes which have the same communication range R as that of sensor only forward data. Since relays are more expensive, the number of deployed relays is to be minimized and they should be populated carefully. Cheng et al. formulate placing the fewest relays to connect nodes as finding the Steiner minimum tree with a minimum number of Steiner points and bounded edge length [27]. Lin and Xue proved that this problem is NP-hard [6]. Therefore heuristics are pursued in this paper.
4. The ORNP Approach
The proposed

The framework of
4.1. Major Steps of ORNP
4.1.1. Voronoi Partition Based Prerestoration Phase (VP)
The area of interest is subdivided into clusters through Voronoi partition with some sensor nodes (cites) predetermined. And in each Voronoi cell, the cluster head and cluster members are chosen as we assumed in Section 3.1. Furthermore some cluster members play the role of gateways due to the fact that the maximum communication range of a sensor is assumed less than two times of its sensing range. While the entire network breaks down into disjoint segments, we try to locate a sensor node s covered by at least two distinct cluster heads

The selection of relay nodes.
Figure 4 shows how Voronoi partition based prerestoration federates disjoint segments with the sensor nodes (cluster members) covered by at least two cluster heads. There are 27 disjoint segments that required federation as shown in Figure 6(a). The black nodes denote the cluster members covered by at least two cluster heads (see Figure 6(b)). They are chosen as relays to joint the corresponding cluster heads such that the number of separated segments is reduced from 27 to 11, as shown in Figure 6(c).

Voronoi partition based prerestoration (VP).
4.1.2. CoM Based Restoration Phase (CR)
After the prerestoration phase, we strive to further reduce the number of disjoint segments by establishing as many

CoM based restoration (CR).
Once all

The rationale is that placing

The resulting topology through
4.2. Distributed Implementation
This section describes how
While the networks are partitioned into disjoint segments due to the major damage, each segment
After the prerestoration phase, each segment
Intuitively, the implementation of
5. Performance Evaluation
5.1. Theoretical Analysis
The correctness, complexity, and approximation ratio of
Theorem 6.
If the area A satisfies the global Voronoi coverage, then there exists at least one sensor node
Proof.
Based on the definition of Voronoi Partition, the position of a Voronoi vertex v is the intersection point of three Voronoi edges which is shared by
Theorem 7 (see [24]).
The centre of mass provides a
We denote the optimal solution to the federation problem on a set S of disjoint segments
Theorem 8.
The number of relays deployed by
Proof.
The
For simplicity, we let
Intuitively, the construction of
Theorem 9.
The complexity of relay nodes deployment toward the
Proof.
The
Theorem 10.
The complexity of the
Proof.
Since
The
In addition, the
So, the complexity of the
(1) Calculate the CoM of the SPG on the current set of separated (2) (3) (4) Choose the sensor (5) Update the list of disjoint segments. (6) (7)
(1) (2) Place a sensor s as a relay to federate three segments (3) Update the list of disjoint segments. (4) (5) Calculate the CoM of the SPG on the current set of separated (6) (7) Each (8) (9) Choose the closest (10) Update the list of disjoint segments. (11) (12)
5.2. Validation Experiments
The simulation environment, performance metrics, and experimental results are discussed in this subsection.
5.2.1. Performance Metrics and Baseline Approaches
In our experiments, a partitioned
Communication Range of Relays
Number of Segments
We used the following two metrics to evaluate the overall performance of
Number of
Average Node Degree. The connectivity of the resulting topology is measured by the total number of links among neighboring
We compare the performance of
MST-1tRN. This algorithm strives to place the minimum number of
Note that among three baseline approaches, only
In summary,
5.2.2. Simulation Results and Comparison of the Generated Topology Quality
Several configurations with different combinations of R and
Number of RNs. Figure 9 gives a performance comparison of
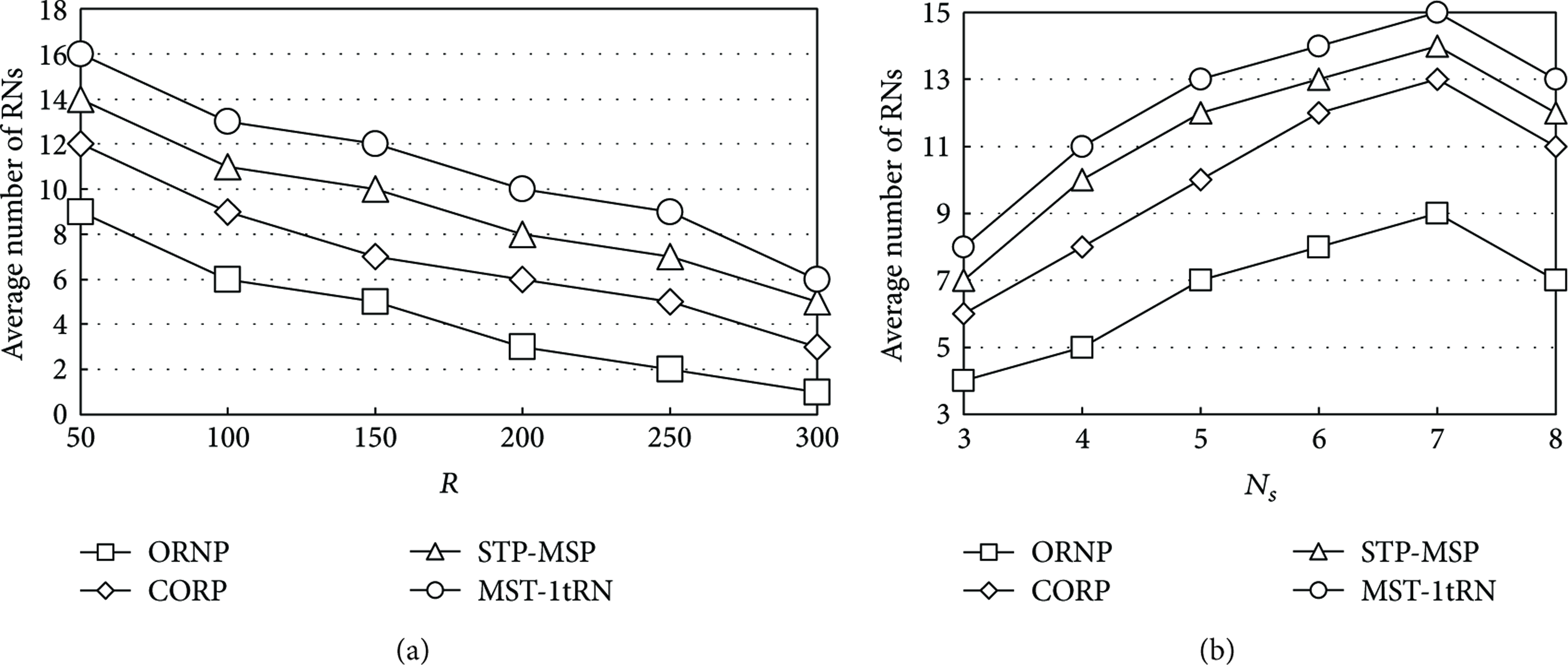
Comparison of RN count.
Figure 9(b) shows how
It is worth mentioning that even if there are no eligible sensors chosen as gateways which implies the Voronoi partition based prerestoration does not work,
Average Node Degree. Seen in Figures 10(a) and 10(b), a better topology with higher connectivity in terms of the average node degree is generated by

Comparison of average node degree.
Figure 11 shows the comparison on the resulting topologies obtained by
ORNP versus MST.
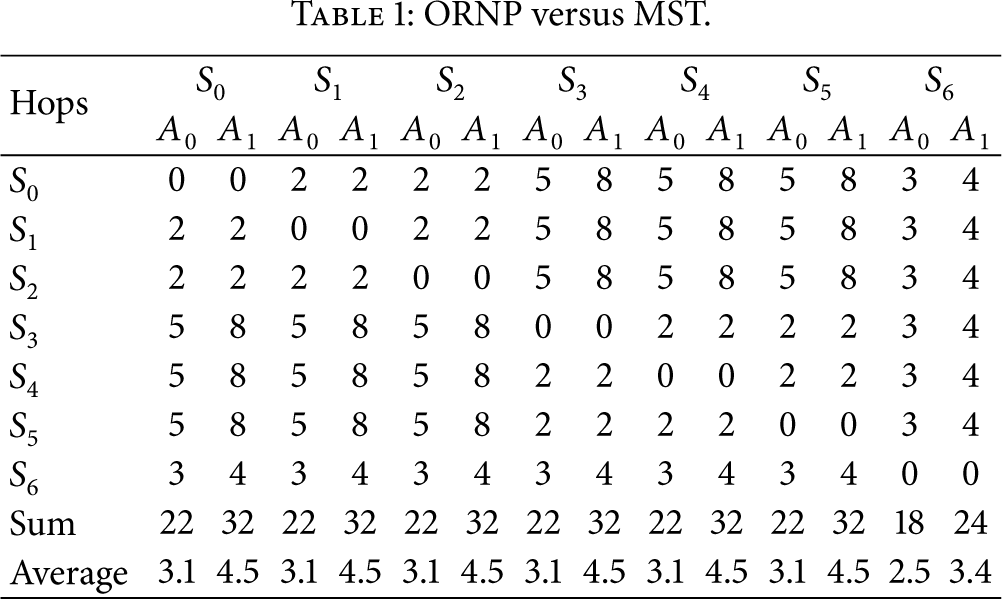

Comparison of resulting topology.
6. Conclusion
In this paper, we have discussed the problem of federating disjoint segments in a partitioned
Here are some open issues that will be addressed in the future. The first one is that relay nodes deployment may consider the quality of service (
Footnotes
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Acknowledgments
The authors wish to thank the National Natural Science Foundation of China (nos. 61072080 and U1405255), the Fujian Normal University Innovative Research Team (no. IRTL1207), the Natural Science Foundation of Fujian Province (nos. 2013J01221, 2013J01222, and J01223), and the Education Department of Fujian Province Science and Technology Project (JB11027).