
Abstract
We address the problem of finding the boundaries of a set of points by using a limited range-cyclic order detector. This sensor, denoted by lrcod, is able to detect nearby objects and enumerate them by their cyclic order; neither distance nor the angular position of each object is provided. Boundaries are important in many applications such as detecting the breakdown of networks, insufficient coverage or connectivity, abnormal functioning sensors, and virtual coordinates for routing. We studied the information space of the lrcod sensors and established their capabilities to find inner and outer boundaries. Our proposed approach uses local information to recognize points on the boundary. To discover the complete boundary we define the Right Hand Without Crossings (RHWoC) rule. We also provide a correctness proof of this rule. The experimental evaluation confirms the effectiveness to find the boundary of large sensor networks.
1. Introduction
Sensor networks can be seen as a large collection of nodes that reason about the state of the world, that is, their environment. Distributed sensing improves the signal-to-noise ratio because sensors are closer to the phenomena. Obtaining the boundary of a sensor network is important in many engineering applications. Boundaries are useful to detect the breakdown of a network, insufficient coverage or connectivity, abnormal functioning sensors, virtual coordinates for routing, and so forth. Boundary recognition is a challenging issue in wireless sensor networks [1]. The distinction between inner and boundary nodes of the network can provide valuable knowledge to a broad spectrum of algorithms. In practice, sensors are deployed randomly in a given area. Even if the initial deployment is known, the topology may vary because of sensors failure. Furthermore, many applications require dynamic sensors.
Ad hoc networks are often modeled as unit disk graphs (UDG), where each point can reach other points in a given radius λ. Accurately defining the boundary of a UDG without a general position system (GPS) is a challenge that should not be underestimated.
The problem we address in this paper is to find the boundaries of a set of points by using a limited range-cyclic order detector. This sensor, denoted by
Although the model studied in this paper considers a sensor network as its main application, many ideas developed here could be applied to other areas such as mobile robots. For mobile robots, landmarks are like sensors in a network, and the robot provides the communication link between them. Tovar et al. [6] consider a robot that moves in the plane and that is able to sense only the cyclic order of landmarks with respect to its current position. In contrast to [6], which considers an infinite range sensor model, this paper studies a sensor that can only detect objects at a maximum range of λ. A limited sensing model is more convenient for real applications; for example, laser scans have a maximum range, walls in indoor environments can occlude some objects, and so forth.
The rest of the paper is organized as follows: Section 2 introduces some basic definitions used along this paper. Section 3 describes the assumed network model and defines the problem. Section 4 describes how to detect a single point on a boundary and using it to recover the complete boundary. Section 5 describes the simulations and results obtained from the proposed algorithm, showing that it works under different conditions. Section 6 describes the related work. Finally, Section 7 concludes this work.
2. Basic Definitions

Sequence of landmarks detected by the sensor.
A set of landmarks is in
Circular Sector. Given two landmarks
The sensor
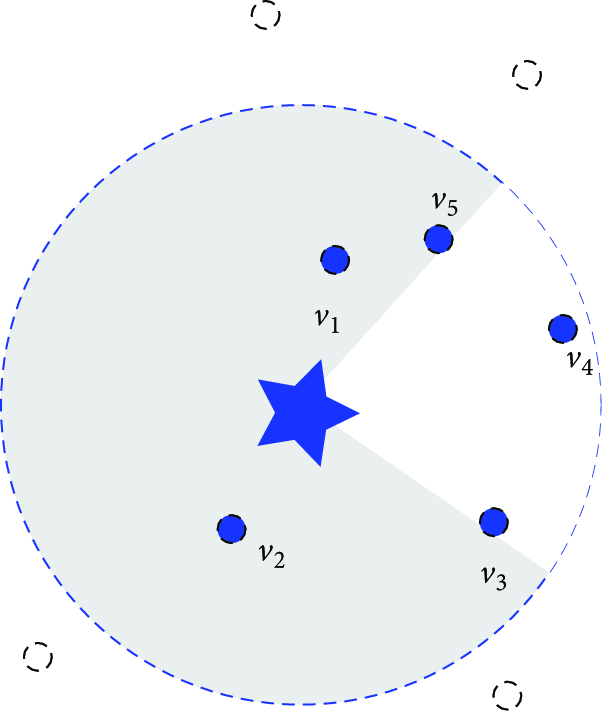
Orientation and circular sectors. Circular sectors detected from
Walk. A walk in a graph G is a sequence
Polygon. A polygon P is a finite sequence
Simple Polygon. A simple polygon is a polygon composed of nonrepeating vertices where none of its edges
The Jordan curve theorem states that every simple closed curve divides the plane into an interior region bounded by the curve and an unbounded region containing all exterior points.
Weakly Simple Polygon. A polygon P is weakly simple if, for any
In other words, a polygon is weakly simple if it can be made simple by an arbitrarily small perturbation of the entire curve. Informally, a weakly simple polygon is a polygon in which sides can touch each other but cannot cross. Any weakly simple polygon P partitions
λ-Polygon. A λ-polygon P is a weakly simple polygon where
λ-Boundary. A λ-boundary or outer boundary P of a set of points V is a λ-polygon such that
Diagonal. A diagonal is a line that connects two nonconsecutive vertices of a polygon; an inner diagonal lies totally in the interior of the polygon.
Hole. A hole or inner boundary is an empty λ-polygon with vertices
3. Network Model
Throughout this paper, we consider sensor networks that satisfy the following assumptions.
The system is composed of a set of sensors V, located in a region Every sensor All wireless sensors have the same maximum transmission range λ.
Assumptions (i) and (iii) involve that each sensor can gather information from other sensors within its transmission range. Therefore, we can build a network graph whose vertices correspond to the labeled nodes and whose edges correspond to communication links. Henceforth, we will indistinctly call them sensors, nodes, or landmarks.
Assumption (i) admits that sensors can move arbitrarily in R but they are static for a period of time τ long enough to recover the boundaries. Furthermore, we assume that landmarks are in general position (i.e., no three landmarks are collinear). Assumption (iii) is usual in ad hoc networks modeled as unit disk graphs (UDG), where each point can reach other points in a given radius λ.
Problem Definition. Given a network V of
The task we are solving is to find the perimeter of a set of points; this task can be done by simply following the sequence of extreme points on the convex hull. Classical algorithms such as the Graham Scan [9] can be used to find the convex hull (CH) of the point set.
Unfortunately, following it by using the limited range-cyclic order detector is in certain cases impossible, because the distance between two consecutive extreme points could be greater than the maximum range of the sensor. Hence, when following the CH of the set of
4. Proposed Algorithm
The proposed approach finds points on the boundary following the procedure described in Section 4.1. Those points can be used as seeds to find the complete sequence of points on the boundary, as described in Section 4.2.
4.1. Boundary Points
This subsection presents a series of definitions and lemmas that are the basis for discerning boundary from inner points. According to our definition of holes a λ-polygon P formed by less than four points cannot be a boundary; hence, three connected points on the vertices of a triangle cannot form a hole; therefore, a hole must have at least four landmarks.
λ-Point. A λ-point is a point
4.2. Detecting a Boundary from
-Points
This subsection addresses how to use λ-points as seeds to find the boundary sequence.
Let
The right-hand rule (RH) is a heuristic rule that has been used extensively to deliver packages in ad hoc networks [10]. It has also been used to find the convex hull for an unlimited cyclic sensor [6]. The right-hand rule states that if the last two previously visited vertices of a walk are
To complete a boundary starting from a border walk, we define the Right Hand Without Crossings (RHWoC)rule. Given a partial walk
4.3. Discovering Intersections
The RHWoC rule selects an edge that does not cross any previous edge in the border walk, but the border walk W could be a long sequence of vertices and edges. The following lemma states that when two edges intersect at a single point, at least one vertex of an edge must see at least one vertex of the other edge.
Lemma 1.
Let
Proof.
When
We are interested in determining if two different edges intersect in a single point. When discovering crossing edges, the endpoints of two edges could be the same; hence, there is only one rather than two distinct edges. This condition is easily detectable and can be used to discover connectivity issues of the network such as bridges and articulation points [11].
Lemma 2 states how to use the information provided by
Lemma 2.
Let
Proof.
Figure 5(a) illustrates this lemma for
Corollary 3.
Let
Proof.
Corollary 3 follows directly from Lemma 2. In Figure 5(b), the edge
Observation 1.
It is always possible to define intersections for a walk with four or more vertices by using Lemma 2.
Although it is useful to find inner diagonals of a hole, λ-points are better to find points on the boundary when two consecutive points on the convex hull cannot see each other. Sometimes small holes do not have detectable λ-points; for instance, the

(a) Detectable

Finding the boundary from a partial walk. The boundary is recovered from the walk
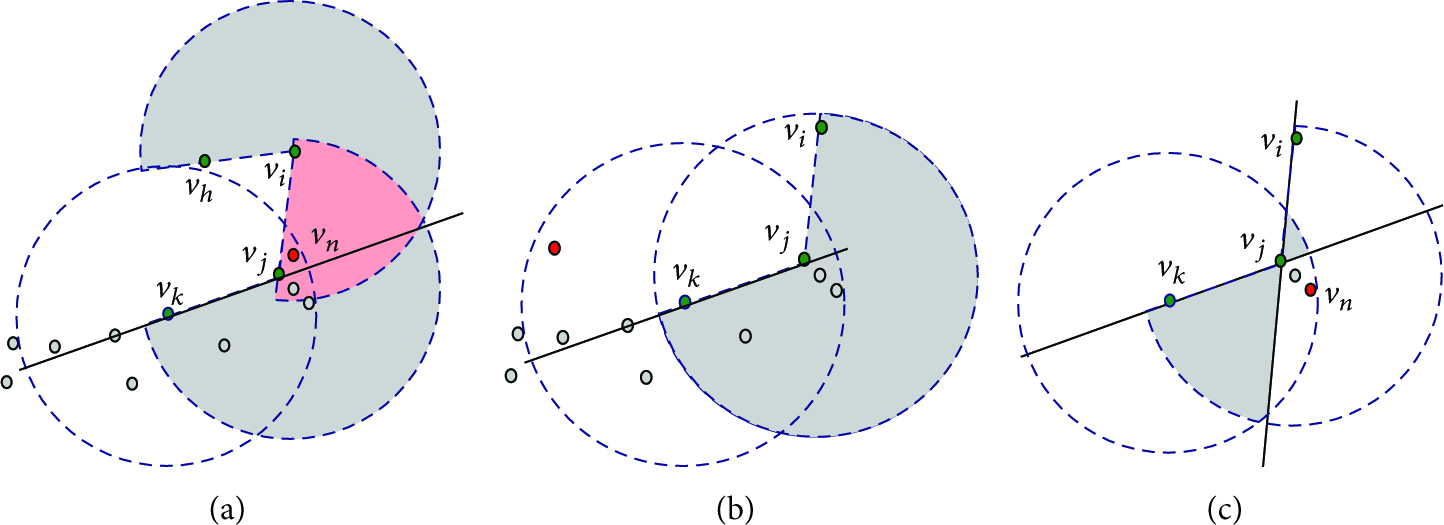
Discovering intersections. Using sectors and landmark ordering, one can determine when two edges intersect at a single point.
Observation 2.
If there is only a single λ-point (a walk with three points instead of four) then Corollary 3 can be used. We can define some other cases such as that shown in Figure 5(c) where
4.4. Algorithm Overview
To find the boundaries of a set of points V we propose Algorithms 1 and 2. In Algorithm 1 each sensor first obtains local information (line 1), then it applies the definition of Section 4.1 to recognize two consecutive λ-points (lines 4–6). If the λ-point and its corresponding adjacent points are not already used, then a boundary (or a hole) has been detected and the function RHWoC is called (line 7). Function alg:closed recovers the complete border until it finds an edge that already is on the boundary. When no more borders can be found then the list
(1) Exchange sensor information between neighbors; (2) (3) (4) (5) (6) (7) (8) (9) (10) (11) (12)
(1) (2) (3) (4) (5) (6) (7) Circular-rotate L until (8) (9) (10) (11) (12) (13) (14) break; (15) (16) (17) (18)
Correctness of Function RHWoC. Let
5. Simulations
The proposed algorithm has been implemented for randomly generated sets in a quadrangle of

Boundaries obtained from a set of N uniform distributed random points within a quadrangle of
6. Related Work
A well-known technique to find the boundary of a set of points is the α-shape [12]. Alpha shapes are closely related to alpha complexes, subcomplexes of the Delaunay triangulation of the point set.
Some approaches to detect boundaries in networks are (a) distribution of nodes in the nonhole regions [13], (b) length of the shortest path between two nodes to detect cycles [14, 15], and (c) patterns that the nodes produce [1].
In robotics, landmarks are useful for navigation, place recognition, localization, and mapping. The proposed approach deals with a more challenging setting compared with [6], on which a robot that is only able to detect the cyclic angular order of landmarks in an unlimited range can accomplish simple tasks, such as navigation and patrolling. One of the advantages of this approach is that the memory of the robot does not save the complete state of the environment. To compensate, it considers an infinite range in the landmark order detector.
7. Conclusions
The problem we address in this paper is to find the boundaries of a sensor network by using a limited range-cyclic order detector. By using local information we show how to detect λ-points; these points are on the boundary or on a hole. The Right Hand Without Crossings (RHWoC) rule can be used to discover other landmarks from an incomplete border walk. We provide a correctness proof of the RHWoC rule.
Some holes could not be detected by using local information. We also show the configurations where the boundary is detectable; the most remarkable case is when there are two consecutive λ-points. Therefore, the proposed technique is appropriate for large sensor networks. The experimental evaluation confirms the effectiveness to find the boundary of large sensor networks.
Footnotes
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.