
Abstract
This paper develops a novel augmented filtering framework based on information weighted consensus fusion, to achieve the simultaneous localization and tracking (SLAT) via wireless sensor networks (WSNs). By integrating augmented transition and observation models, we formulate a dynamical system that encodes both the target moving manners and coarse sensor locations in an augmented state. We then conduct augmented filtering based on augmented extended Kalman filters to estimate the augmented state. We further refine our target estimate according to information weighted consensus filtering which fuses the target information obtained from neighboring sensors. The fused information is fed back as the target estimate to the augmented filter. Our framework is computationally efficient because it only requires neighboring sensor communications. Experiments on SLAT problem validate the effectiveness of the proposed algorithm in terms of tracking accuracy and localization precision in limited ranging conditions.
1. Introduction
Simultaneous localization and tracking (SLAT) has gained great research interest recently. It is popular to formulate SLAT framework using a centralized architecture, where all the sensors transmit their measurements to a central node that fuses the received information and computes target trajectories. One typical example is the SLAT framework based on Bayesian inference proposed in [1], in which the sensor positions are assumed unknown and thus moment matching is required to obtain the position information. Similarly, in non-line-of-sight environments, cubature Kalman filters have been developed for SLAT [2], with augmented state vector constructed by concatenating a target state and a sensor location. Traditional SLAT frameworks rely on centralized fusion of sensor-based target state estimation, and they suffer from heavy communication overheads and are thus inefficient. Furthermore, the performance of a centralized SLAT solution is significantly affected by the central sensor, which limits the robustness of the whole sensor network.
Distributed SLAT frameworks can possibly overcome the aforementioned problems and have attracted increasing research interest. For one thing, they show significant potential in improving individual sensor functionalities that are usually limited by their simple hardware implementations. For another, they can thoroughly exploit the advantages supported by distributed sensing [3]. One early attempt of the distributed strategies is the decentralized data fusion method with all-to-all sensor communications [4], where a decentralized version of the recursive maximum likelihood for Hidden Markov Model and belief propagation message passing algorithms have been exploited to localize the sensor network simultaneously with target tracking. Almost at the same time, a distributed variational filter for SLAT has been proposed [5], which takes the messages with both belief propagation and bandwidth consumption into consideration. However, these distributed frameworks rely on a specific communication network topology and are not generally applicable to arbitrarily connected networks. Most of them are derived based on the belief propagation method in Bayesian filtering framework, which may lead to heavy computation costs. Moreover, these methods heavily rely on distance measurements, which, however, are not always guaranteed in practice due to the limited sense range (LSR) of individual sensors [6].
The difficulty of sensor localization lies in the fact that a target may not be observed by some or all sensors in a practical network. To overcome this limited observability, many strategies have been proposed, such as the distributed sensor localization framework with weighted consensus [7], the hybrid peer-to-peer tracking architecture with Kalman consensus filter [8], and the information weighted consensus filter [9]. In particular, particle-based distributed message passing algorithms for SLAT have been employed to solve the LSR problem. Here, one representative study is the intersensor measurements composed of nonparametric belief propagation with a likelihood consensus scheme [10]. However, LSR conditions are task-specific and these methods are not applicable to a general SLAT scenario.
In order to solve the practical SLAT problem with LSR constraints, we propose a distributed SLAT algorithm for the networks whose sensors can cooperate by exchanging messages among neighbors. Specifically, we design a distributed augmented consensus estimator for SLAT under LSR conditions. Our framework inherits some desirable properties from the information weighted filter (ICF) [9]. The errors in the information held by each sensor become highly correlated with each other as consensus approaches. We thus utilize the cross-covariances of the information to estimate the optimal weights of prior states and measurements. By employing a general state evolution model, we are able to characterize the coupling state for both the target and one activated sensor and then estimate the model state through augmented filtering based on the augmented extended Kalman filter. We then update the target state through consensus filtering by fusing the distributed filtering information and the weighted consensus information.
Comparing with the belief propagation schemes, our framework has the advantage of low computation cost because it reduces the unnecessary communication overheads. Furthermore, it addresses the error decoupling problem, which is usually unavoidable in the algorithms that distributively estimate sensor positions and target trajectories, by proposing a two-stage filtering architecture.
The structure of the paper is as follows. We begin with the specifications of the statistical model for the localization and tracking problem in Section 2. Section 3 proposes the distributed augmented filter with consensus. Section 4 presents numerical examples on small sized networks and validates the proposed framework. Section 5 discusses and concludes the paper.
2. Preliminaries
Consider one wireless sensor network consisting of a set of N sensors. Assume that the sensor network is an undirected graph and the communication range of the sensors determines the topology of the network. As illustrated in Figure 1, we denote the communication range and sensing range of the sensors as

A typical SLAT scenario.
We denote the state vector of a target as

We use a linear Gaussian model to formulate the target state transition:

We denote the coordinate of sensor i as

3. Augmented Filtering Based on Information Weighted Consensus Fusion
This section proposes an augmented filtering framework based on information weighted consensus fusion, for the purpose of target tracking and sensor localization. We first introduce the augmented transition and measurement models and then describe how to exploit augmented filtering to update the coupling information of the target state and sensor localization of each node. We establish the framework by developing an information weighted consensus filtering scheme which exploits online consensus fusion of local neighboring information to refine the target states. As an integrated framework, each augmented filter is specific to a separate sensor subsystem and gets feedback from the local information weighted consensus filter. Such structure enables the elimination of coupling errors for localization and tracking and thus improves the system accuracy.
3.1. Augmented Models
In this subsection, we introduce the basic augmented model used in our framework. Specifically, the distance between a target state described in (2) and the sensor location of i described in (3) is given as follows:

We can integrate the position information of a target and a sensor into one augmented vector

We assume the measurement model as a linear Gaussian model over a set of range measurements under measurement noise. Therefore, the measured receiving power by sensor i at time stamp k,

Following the relations in (4)–(6), we obtain


The aim of our study is to develop a distributed consensus estimator for the system characterized by (5) and (8), which are introduced in the following subsections.
3.2. Preliminary Augmented Filtering
In order to estimate the states of a sensor and the target in a fully decentralized manner, an extended Kalman filter based estimator for augmented state (EKFAug) is applied. This procedure is referred to as augmented filtering where the estimator receives feedback from the information weighted consensus filter.
In this scenario, we assume that the one-step estimate of the augmented state


A single forward operation of the EKFAug on sensor i at the current time step is as follows.
Step 1.
Prediction is as follows:


Step 2.
Estimation is as follows:




3.3. Fusion Based Refinement
The EKFAug discussed in the previous subsection is specific to one individual sensor. The estimate of an augmented state based on (14) and (15) is only concerned with the individual sensor and does not explore information exchange between neighboring sensors. In order to characterize local neighboring information, we fuse their estimates by developing a distributed information filter with weighted consensus fusion and feed such information to the previous extended Kalman estimator. We refer to the overall framework as EKFAug-ICF, which stands for extended Kalman filter based estimator for augmented state with information weighted consensus fusion.
Given the condition that the sensor state prediction


Let
Step 1.
Prepare data for fusion:

Step 2.
Perform information weighted consensus fusion on

Step 3.
After M iterations, compute state estimate and information matrix:


Our framework is suitable for the practical applications which are limited by LSR conditions. The feedback scheme in (21) and (22) enables our framework to have the advantages of fault tolerance and scalability, which are validated in the experimental evaluation.
3.4. Framework Structure and Algorithm
Sections 3.2 and 3.3 have presented the two main filtering procedures of the proposed distributed estimation framework of each sensor. The overall diagram of our proposed framework is illustrated in Figure 2. Estimate

Structure of the augmented filtering framework. In the figure, EKFAug denotes the extended Kalman filter based estimator for augmented state n,
The pseudo code of the proposed two-stage SLAT algorithm is summarized in Algorithm 1.
Generate measurement according to (8); Modify sensor localization with target tracking in augmented filter according to (11)–(16); Compute initial information matrix and vector according to (19); Perform average consensus; (a) Send (b) Receive (c) Update these values according to (20); Update
4. Simulation
In this section, we evaluate the performance of the proposed EKFAug-ICF algorithm using simulation experiments and compare it with the centralized matrix weighted fusion approach [12, 13], denoted as EKFAug-MWF. We simulate a wireless sensor network comprising a moving target and a total of
We commence by demonstrating how to solve the sensor self-localisation and target tracking problem using our framework. Dynamical model (2) is used to compute the target state. The process covariance is set to
For each sensor, the ranging field is considered to be a circle with a radius of 200 units. A sensor can detect a target only if the ground truth position of the target is within its range field. In this case, a measurement is generated using nonlinear observation model (8) with noise covariance
An example of the tracking simulation experiment is demonstrated in Figure 3. The experiment results show that EKFAug-ICF performs better than EKFAug-MWF. This is because the estimation fusion with distributed consensus often achieves better error tolerance and robustness than that of the traditional state fusion approach.

Results of the distributed SLAT tracking experiment.
We further investigate the performance of the two approaches through 200 independent trials. The simulation environment is the same with Figure 3. The root mean squared error (RMSE) of
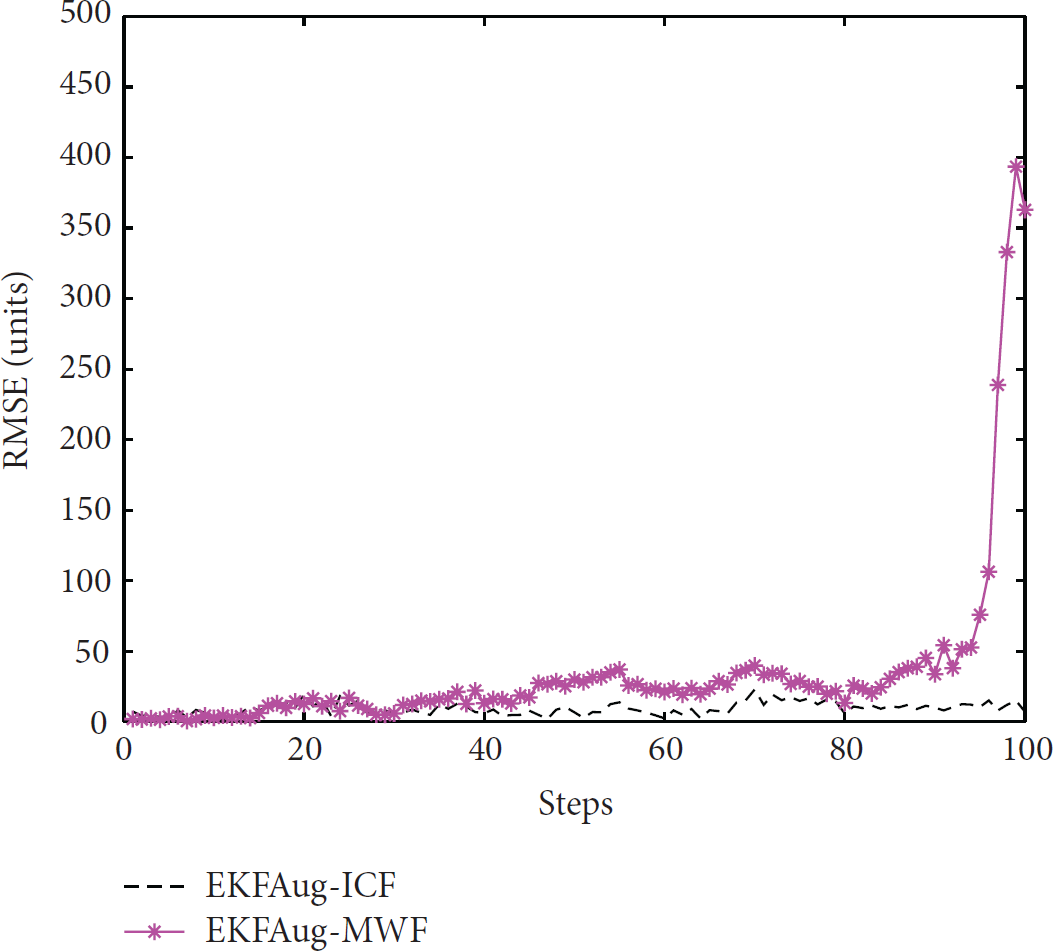
The average error of target estimation.
As target tracking updates online, the positions of sensors, which are prelocalized coarsely beforehand, are modified simultaneously. The ground truth and the estimated sensor locations of EKFAug-ICF and EKFAug-MWF are illustrated in Figure 5, which shows that the precision of sensor localization with EKFAug-ICF is greater than that of EKFAug-MWF.
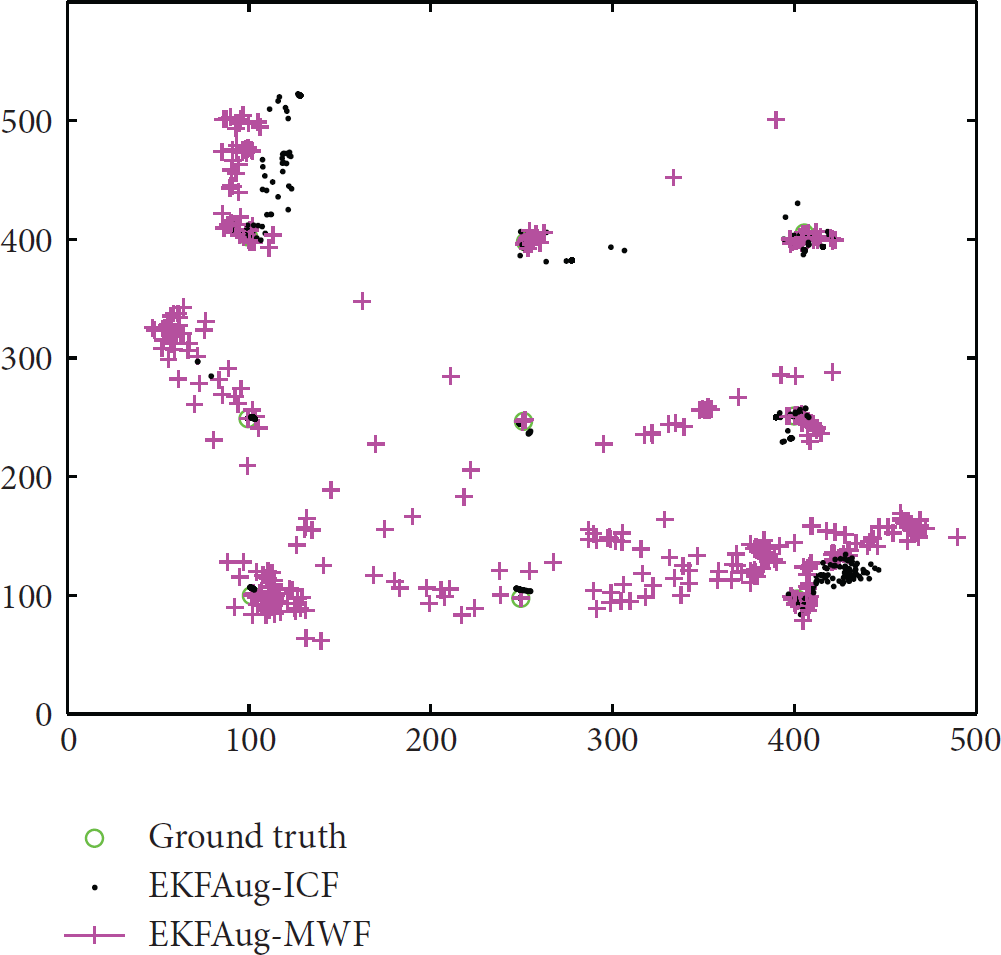
The ground truth and estimated sensor positions.
Figure 6 shows the estimated errors sensor positions using the two approaches, where EKFAug-ICF provides almost identical position estimations to the ground truth. Both EKFAug algorithms work well in SLAT and ICF performs better. It can be seen that the proposed algorithm is able to accurately locate sensors within a wireless sensor network.

The average error of sensor position estimation.
5. Discussion and Conclusion
EKFAug-ICF and EKFAug-MWF are two types of estimation methods for SLAT, where the first one is in a distributed manner while the second one is in a centralized manner. Theoretically, these two methods should have similar performance in terms of computational complexity and executing time. EKFAug-ICF may, however, encounter more difficulties in practice, especially when there exists time delay or packet loss in the communications among sensors. The proposed system is mainly targeting a typical indoor environment, where the settings are similar to those from [2] and the network setup is the same with [14]. The effect of η in different scenarios, such as outdoor, will be considered in the future research.
This paper proposes a filtering architecture based on extended Kalman filtering for characterizing the correlation of target tracking and sensor localization with augmented states. Specifically, we have described how to refine augmented filtering through the fusing information obtained from neighboring sensors based on the weighted information consensus filtering strategy. Our new scheme not only improves the performance of estimation through the fusion and feedback strategy but also reduces the computational overheads in sensor communication via the neighborhood confinement. The experiment results have shown that our novel framework exhibits robustness in the LSR situations.
Footnotes
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Acknowledgments
This work was partially supported by the National Natural Science Foundation of China (Grant nos. 61503413 and 61411130134), the National Science and Technology Pillar Program (Grant no. 2013BAH54F03), Shandong Provincial Natural Science Foundation (Grant no. ZR2015FL027), Shandong Outstanding Young Scientist Fund (Grant no. BS2013DX006), the UK Royal Society (Grant no. IE131036), and the Fundamental Research Funds for the Central Universities.