
Abstract
Beacon or safety messages are broadcasted in vehicular ad hoc networks (VANETs) to disseminate network state or emergency incident information to other vehicles in the network. The freshness of information depends upon the frequent transmission of beacons. Similarly, to increase the awareness area or communicating with the distant nodes, beacons are disseminated with a high transmission power. However, increasing the beacon transmission power or rate has a negative effect on information communication efficiency because of the finite bandwidth of the wireless link. Therefore, different schemes have been proposed to individually control beacon's transmission power, transmission rate, or contention window at the MAC layer, or any combination of those, to achieve quality beacon communication in VANETs. The latter case is called hybrid adaptive beaconing schemes. In literature, there are many hybrid adaptive beaconing schemes that control multiple communication parameters to efficiently broadcast beacon messages in VANETs. In this paper, we explicitly survey and summarized various aspects of those schemes. The open and challenging issues are also highlighted in this paper.
1. Introduction
Intelligent transportation system (ITS) is inevitable for the current growth rate in the number of automobiles around the globe. It consists of applications, technology, and communication infrastructure to provide mobility management and traffic management and enables coordination and safe transportation for various users and operators. Main features and services of ITS include driver and passengers' safety, comfort, efficiency, road, and other information availability and management on the road. The users and operators of ITS make decisions based on the real-time data collected from the system. The main functions of ITS include collection, distribution or communication, and processing of real-time data and take decisions independently (e.g., control traffic light's duration, vary speed limits, control vehicle's maneuver autonomously or with little human intervention, etc.) or provide aid to the operators in transport management. One of the widely researched and potential architectures for ITS is the vehicular ad hoc network (VANET) [1, 2].
VANET mostly provides wireless communication among vehicles (called vehicle to vehicle or V2V communication) and between vehicles and the equipment installed at roadside (called vehicle to infrastructure or V2I communication). As vehicles move at the higher speed, therefore, network topology changes rapidly. Another effect of this mobility is the short link lifetime and variable network density. This makes it challenging to maintain vehicles' proximity information with minimum information exchange within the VANET.
Due to ad hoc in nature, VANETs work without relying on any preestablished network infrastructure. The fast nodes or vehicles mobility on structured roads and streets infrastructure makes this large size network a highly dynamic. Each vehicle is equipped with wireless technology to cooperatively exchange or broadcast information with other vehicles in the network. The wireless technologies that have been investigated in vehicular networks during the past decade include dedicated short-range communications (DSRC)/wireless access in vehicular environment (WAVE) [3–5], cellular [6], satellite [7], and WiMAX [8].
DSRC/WAVE is exclusively proposed for the vehicular networks and it considers IEEE blind spots and lane changing, forward collision, left or right turn assistance, assistance at intersection, emergency breaking, emergence vehicle approaching, real-time road condition, cargo vehicle safety and clearance, eToll and eParking, and so forth.
In WAVE/DSRC stack, WAVE Short Message Protocol (WSMP) is a network layer protocol which provides communication services for the priority based short messages, called Beacons, that are mostly communicated over the control channel (CCH). Dissemination of information through beacon message in a VANET is termed as beaconing. The information inside a beacon may include vehicle's address, location, speed, direction, event, or other information. These short messages are used to satisfy information requirements of the safety and nonsafety applications. In nonsafety applications, general transport awareness information within the network is disseminated through beacons. Each vehicle broadcasts a beacon message within its one hop to keep neighborhood awareness. In case of any emergency situation or an incident, for example, road blocks, landslide, construction sites, accidents, traffic jam, and so forth, similar beacon message (safety beacon message) may also be used to disseminate information about this specific event to warn drivers; refer to Figure 1. Based on severity of the incident, beacon messages may be assigned priorities and broadcasted accordingly. This type of beacon communication is used in vehicular networks to realize safety applications. In case of an incident or emergency situation the vehicle that encounters this event first or the vehicle that is involved in the incident triggers a safety beacon message to inform neighboring and the trailing vehicles about the incident to apply safety precautions proactively. Timely incident information dissemination to assure safety of passengers is the main objective of safety beacon messages. Therefore, the safety beacon message should be disseminated with minimum delay, packet loss, and congestion. The congestion and packet loss can be caused by the beacon broadcast storm, when a large number of vehicles broadcast the beacon message. This leads to an improper information dissemination in the network.

Incident based sparse and dense network situation.
Since the same CCH is used by all vehicles, beaconing load may saturate the capacity of the channel. Therefore, channel congestion due to beaconing load should be avoided to minimize beacon collision and communication delay and improve channel access fairness and reception rate. Several beaconing schemes have been proposed in the literature and are classified into two main categories: periodic and adaptive.
Periodic beacon messages are broadcasted at regular intervals or a constant rate (

Repetitive sparse and dense network scenario.
Wireless channel congestion caused by periodic beacons can be reduced by the adaptive beaconing schemes that adaptively (a) adjust the beacon transmission rate, called adaptive beacon rate schemes, (b) regulate transmission power to reduce beaconing overhead for sparse and dense network conditions, called adaptive beacon power schemes, (c) contention window size (
Adaptive beaconing schemes use network conditions, traffic behavior, and/or wireless channel parameters that include a number of neighbors or 1-hope node density, beacon reception probability, beacon reception rate, distance between nodes, channel quality, channel busy ratio, and packet loss rate, to adjust the beacon rate, transmission power, contention window size, or any combination. For example, if the number of vehicles in the coverage area of a certain vehicle increases, then that vehicle increases the beacon interval to avoid congestion of the wireless link. Similarly, the beacon transmission rate is reduced in case of higher beacon loss rate or low beacon reception rate. In case of sparse network, maximum network proximity awareness can be achieved by increasing the transmission range (
1.1. Motivation
General surveys on beaconing schemes in VANETs have been presented in [11, 12]. However, to the best of our knowledge, there is no work that provides a comprehensive survey of the hybrid adaptive beaconing schemes for VANETs. Therefore, in this paper, we summarize the adaptive beaconing schemes with emphasis on the hybrid adaptive schemes. These schemes are discussed in terms of network characteristics, simulation environment, and parameters such as VANET scenarios, simulation outcomes, and adaption schemes they employ to dynamically regulate beacon transmission rate, power, and/or medium access control (MAC) characteristics for efficient communication of beacon messages.
The rest of the paper is structured as follows. First, we give background information regarding the beacon message and beaconing schemes in Section 2. Then, Section 3 briefly discusses the state of the art hybrid beaconing schemes along with the qualitative analysis of parameters and control methods. The comparison of simulation environments used by hybrid adaptive beaconing schemes is presented in Section 4. Section 5 discusses few open and challenging issues. Finally, Section 6 concludes the discussion.
2. Background
This section briefly discusses the background information related to beacon message and beaconing approaches that efficiently broadcast theses short messages.
2.1. Short Messages (Beacons)
WAVE/DSRC defines different types of short messages for safety applications that include common safety request, emergency vehicle alert, and intersection collision avoidance [4, 13]. The short messages defined in WAVE, called WAVE short messages (WSMs), are triggered by upper layers and sent through wave short message protocol (WSMP). Generally, these short messages are broadcasted in IEEE
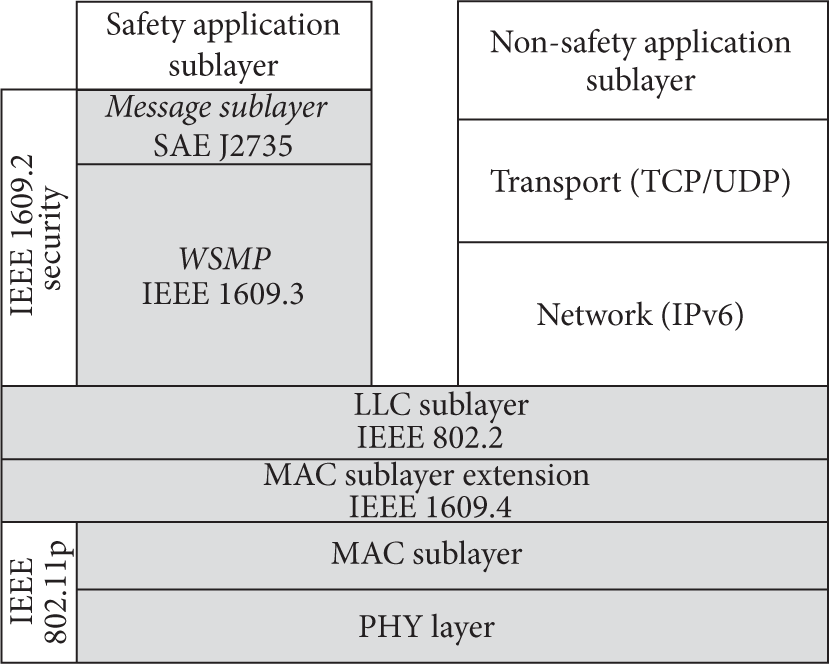
WAVE/DSRC communication's layered architecture.
Figure 4 shows detailed format of WSM message. WSM consists of a variable size header and payload, where the header has 1-byte version field that specifies the WSMP version number (the current version value is 2 [5]). The provider service ID (PSID) is 4-byte long and is analogous to port number in TCP or UDP to associate WSM payload with the specific service, that is, safety service. The incoming and outgoing data between layers is matched with service number and processed accordingly. Extension field is optional in WSM and provides flexibility to communicate additional information in WSM. Generally, header extension field consists of three parts: 1-byte identifier, 1-byte length, and variable size contents field. The recent IEEE 1609.3 version defines different header extension formats that include channel number, data rate, and transmit power used. The content part in each header extension field is 1 byte long. Therefore, each header extension field is 3 bytes long in the current version of IEEE 1609.3, as shown in Figure 4. WAVE element ID field indicates format of WSM payload and marks end of the header extension field. WSM Length represents the length of the WSM payload field. WSM payload/data field contains the data provided by the upper layers, for example, message sublayer, refer to Figure 3. This data is communicated from a sender to the receiver in WSM using WSMP over DSRC channel.

Message format of WAVE short message (WSM).
The message sublayer, Society of Automotive Engineers (SAE)
The efficient beacon broadcast mechanism is one of the challenging issues in VANETs because of the broadcast nature of IEEE The short beacon message communication has no acknowledgment mechanism to inform sender about its successful reception. Therefore, during broadcast of beacons, collision detection or beacon drop is not possible. To avoid beacon broadcast collisions and fast communication of beacons at the MAC layer, no handshaking scheme, that is, request to send/clear to send (RTS/CTS), before beacon transmission, is used. This leads to the usual hidden terminal problem and makes collision detection harder. In presence of no collision detection, the contention window (CW) remains the same that further increases the chances of collision and degrades the performance of beacon broadcast.
The other challenges in scalable and efficient broadcast of beacon message are its short-live nature. The emergency situation information or status information of a vehicle must be timely updated at the neighboring vehicles to make sure the safety of passengers. In presence of beacon collision and channel congestion due to the dynamic nature of VANET, it is difficult to meet this feature of the beacon message. Therefore, the safety applications can easily be realized by controlling the congestion in the network. In literature, there are many beaconing schemes that have been proposed for VANETs and the following is the brief overview of those schemes.
2.2. Beaconing Approaches
Several beaconing schemes have been proposed in the literature [15–49]. There are two main categories of beaconing schemes: fixed rate or periodic beaconing and adaptive or nonperiodic. The adaptive schemes are further classified into subcategories named transmission rate/frequency, transmission power, contention window size, or hybrid schemes that adapt any combination of beacon transmission characteristics mentioned above. Figure 5 shows the classification of beaconing techniques present in the literature.

Classification of beaconing approaches.
The periodic or fixed rate [15] beaconing approaches broadcast beacons at predefined intervals, usually
2.2.1. Adaptive Transmission Rate Based Beaconing Schemes
Adaptive beaconing rate schemes tune beacon interval to adaptively increase or decrease beacon rate to cope congestion of the wireless link. It is evident that small beacon rate will alleviate link congestion at the cost of information accuracy. There are many schemes in literature that use different parameters to adapt beacon rate [16–29]. The following is the short summary of adaptive beacon rate control algorithms.
The simplest connectivity-aware routing (CAR) scheme has been proposed in [16] that considers node density parameter to adjust beacon rate to update neighborhood awareness in the network. In [17], next beacon is transmitted if the difference between predicted position and current position of neighboring vehicle in the previously received beacon message exceeds the predefined threshold. Authors in [18] adaptively adjust beacon rate based on the current traffic condition. More specifically, they consider movement (e.g., acceleration and velocity) of the vehicle itself and the movement of the neighbor vehicles to estimate beacon rate. The adaptive beacon transmission rate scheme in [19] uses statistical and machine learning technique to compute beacon rate based on number of neighbors or node density and number of buffered messages. PULSAR (periodically updated load sensitive adaptive rate control) [20] optimizes beacon rate by considering the target channel busy ratio (CBR) for the given transmission range. Author proposed adaptive traffic beacon (ATB) in [21, 22], which uses two metrics: channel characteristics and message utility/priority. Channel characteristics include the number of collisions on the channel, signal to noise ratio (SNR), and the number of beacons that is considered to be similar to a number of neighbors. Analogously, the utility is a function of message age, distance between vehicle and the event source, and distance to next RSU.
Additive increase and multiplicative decrease (AIMD) beacon rate control algorithm in [23, 24] increases beacon interval if channel busy time (CBT) is less than the threshold. In case when sensed CBT reaches or increases the threshold, then the beacon rate is decremented to half of its current value. The beacon rate adaptation algorithms to control beacon congestion in [25, 26] are divided into two phases: detection phase and regulation phase. In [25], beacon congestion is detected using a metric that combines beacon's reception rate (BRR), loss rate, and average waiting time. If value of this combine metric crosses the threshold, a node that detects this value and triggers the regulation algorithm to calculate the new beacon interval. This new beacon interval is shared with and used by all neighbor vehicles. The regulation algorithm in [26] uses interval from the reception probability metric computed from the average distance between a vehicle and its neighbors. Beacon rate interval variation is performed in a similar manner as in AIMD [23, 24]. A fuzzy logic based adaptive beaconing rate (ABR) in [27] changes beacon rate using the current traffic information. The fuzzy system gets input that includes traffic density, vehicle direction, and vehicle's own or its neighboring vehicle's status (emergency or nonemergency) information to produce new beacon interval as an output. Collision-based beacon rate adaption (CBA) scheme in [28] monitors and detects the network congestion (number of collisions) and adapts the beacon interval accordingly. The authors in [29] proposed a dynamic beacon rate adaptin scheme, called DynB. The proposed scheme uses channel busy time and a number of 1-hop neighbors to adjust beacon rate by keeping the channel load under the desired value.
2.2.2. Adaptive Transmission Power Based Beaconing Schemes
As stated earlier, the adaptive beacon rate algorithms may increase the freshness of information without congesting the channel in a sparse network scenario. However, it is difficult to achieve maximum network proximity awareness at constant transmission power in identical VANET scenario. Likewise, the link lifetime in VANET is unpredictable and limited due to high mobility and can be increased if a vehicle communicates at the higher transmission power. Hence, each vehicle requires to adaptively regulate its transmission power subject to the network and channel characteristics to avoid channel congestion and increase link lifetime. Transmission power adaption impacts the number of neighboring vehicles that are able to hear beacons sent by their neighbors. Low beacon transmission power would allow only the closest neighbors to hear/decode correctly the message. Conversely, high transmission power would increase the transmission range, allowing more neighbors to receive the message correctly and the number of nodes that are involved in interferences. However, adaptive power schemes may unfairly utilize the network channel due to the fixed beacon rate and highly dynamic topology. Researchers have proposed many adaptive beacon transmission power schemes and the following is the short summary of a few selected ones [30–38].
The beacon power control scheme in [30] uses traffic density that is estimated over each vehicle as a basic criterion to adapt transmission power. The focus of this scheme was to increase link connectivity rather than the congestion control in VANETs. Authors in [31, 32] propose fair power adjustment algorithm for VANET (FPAV) and distributed fair power adjustment for vehicular networks (D-FPAV), respectively. Power assignment to each vehicle is achieved by increasing the transmission power of beacon messages and keeping the beaconing load experienced at each vehicle under the threshold, called maximum beaconing load (MBL). To perform power adjustment in a distributive manner, each vehicle shares beaconing load information to its neighbors that increases control overhead [32]. The authors in [33] propose a cooperative power control scheme called delay-bounded dynamic interactive power control (DB-DIPC). The iterative directional antenna based neighbor discovery method is used for transmission power adjustment to maintain 1-hop link connectivity between neighbors. The proposed solution does not alleviate the congestion, as in [30].
In [34], two power control schemes have been proposed, called distributed vehicle density estimation (DVDE) and segment-based power adjustment for vehicular environments (SPAV). The main objective of those schemes is to meet maximum beacon load with low control overhead, that is, in D-FPAV. The D-FPAV based Emergency Message Dissemination for Vehicular environment (EMDV) method is proposed in [35]. The method fairly allocates transmission power, for the predefined safety beacon load, to all vehicles by using the water-filling concept. Efficient transmit power control (ETPC) in [36] mainly aims to increase probability of packet reception at neighboring vehicles at possible maximum transmission range. The power control information is shared with neighbor vehicles by piggybacking it over the periodic beacons. ETPC achieves better reception probability than the D-FPAV at slightly higher control overhead.
The Network Topology p-Persistent (NTPP) scheme in [37] involves road density to adjust transmission power by ensuring the acceptable coverage percentage. In [38], authors proposed the particle swarm optimization Beacon Power Control (PBPC) based dynamic beacon transmission power control for fixed rate beacons. Transmission power is adjusted by analyzing the channel status metric, called collision probability, that is estimated from the number of received beacon messages and number of neighbors.
2.2.3. Adaptive Contention Window Size Based Beaconing Schemes
There are few proposals that adaptively adjust the contention window size,
The authors in [40] proposed centralized and distributed adaptive
The architecture in [41] adaptively configures the MAC and network-layer parameters. The proposed approach adjusts MAC layer and beaconing characteristics to optimal values for VANETs. However, the authors did not consider the dynamic density characteristics of VANET, that is, vehicle density fluctuation between sparse and dense, to estimate the parameters. The adaptive
The above discussed schemes adaptively regulate one parameter of VANET that includes transmission rate, power, or contention window of MAC layer and keep other parameters constant. For example, transmission rate adaptive schemes use constant transmission power and
3. Hybrid Adaptive Beaconing Schemes
In this section, we briefly discuss the hybrid adaptive beaconing schemes that jointly adapt transmission power
3.1. Power and Contention Window Based Schemes
The authors in [43, 44] purposed a hybrid beaconing scheme, which dynamically adapts the transmission power and the contention window size in order to enhance the performance of information broadcast in vehicular ad hoc networks (VANETs). The enhanced distributed channel access (EDCA) mechanism of
The joint

Joint adaption of
Authors validated the proposed hybrid adaptive transmission power and contention window algorithm through simulations in ns-2 [50]. The performance is measured in terms of throughput and average delay and contrasted with the standard IEEE
A cross-layer architecture for congestion detection and control has been proposed in [45] to reduce congestion in VANETs. The congestion detection part of the scheme collects parameters from different layers and maps congestion into congestion levels. Based on the severity of congestion level, congestion avoidance part of the algorithm is executed at vehicle(s) to improve the network performance. Congestion control uses data rate (

Access categories with minimum CW, maximum CW, and AIFSN.

The contention window adaption is the primary algorithm that controls congestion based on the congestion level. In fully congested network, all communications for ACs are blocked except AC3. For high and medium congestion levels,
If congestion level is ideal, all AC traffic will have minimum delay,
Similarly,
Performance of the proposed congestion control schemes is evaluated numerically as well as through simulation in OPENT [51]. Channel busy time, number of lost packs, success rate, and throughput are used as performance evaluation metrics for varying number of vehicles on the road.
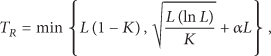
A channel access technique called safety range carrier sense multiple access (SR-CSMA) has been proposed in [46]. A modified physical carrier sensing method in SR-CSMA is proposed with the aim to increase reception probability and minimizes delay for the safety beacons in neighborhood of vehicle. The channel access method takes network characteristics (e.g., vehicles' location that are occupying the channel) to avoid communication collision with distant nodes and reduces collision probability. The safety range (
SR-CSMA carrier sensing scheme [46].
SR-CSMA adapts transmission control in following manner. Vehicle V has any 
Authors performed simulations to measure efficiency of the proposed solution in JiST/SWANS [52]. The simulations show that SR-CSMA scheme slightly increases the beaconing reception rate compared to the default CSMA.
3.2. Power and Rate Based Schemes
The authors in [47] proposed a congestion control scheme that alleviates the link congestion caused by periodic beacons and event-driven warning messages. The authors proposed three algorithms: power control, rate control, and joint power and rate control. The main objective of these algorithms is to keep beacon load within a certain limit and leave a portion of bandwidth for high-priority time-critical event-driven warning messages. Functionality of each algorithm is divided into three phases. (1) Observe channel condition during time period T, called monitoring interval. (2) Estimate channel busy time (
As stated earlier that the authors have proposed power, rate, and joint power-rate control schemes, however, in context of this paper we will focus on the joint power-rate vontrol (PRC) scheme only. PRC controls link congestion at each node by tuning both 
Authors performed simulations in ns-2 [50] and measured the performance in terms of reception rate and CBT ratio for constant network size, varying sender-receiver and vehicle-intersection distances. Results show that the joint power-rate algorithm achieves good performance for even-driven prioritized warning messages.
In [25], authors propose power and rate based congestion control scheme for event driven messages. The beacon congestion control scheme consists of three steps. First, each event-driven beacon message is assigned priority (HL, high level; ML, medium level; LL, low level priority) based on its content type. If more than one beacon messages with same content are received, then second metric is the hop-count (not time to live (TTL) because no TTL information is available at MAC layer). Beacon with low hop count is assigned higher priority because it is assumed that the emergency situation is closer.
In second step, link congestion is measured for the specified interval and stored as a three-dimensional vector named congestion index vector (
In last step, congestion control is applied which includes adaption of 
Beacon 
The proposed hybrid adaptive beaconing scheme is simulated in OPNET [51]. The evaluation parameters include beacon delivery ration, emergency beacon reception ratio, and total delay for varying network densities. Results show that joint power and rate adaption achieves higher delivery, reception ratio, and minimum delay compared to the results with only power, rate, or no adaption.
In [48], authors analyze the effects of joint
Authors consider vehicular environment with variable densities and homogeneous vehicular environment (assign same
The proposed idea considers two optimization parameters: target distance 
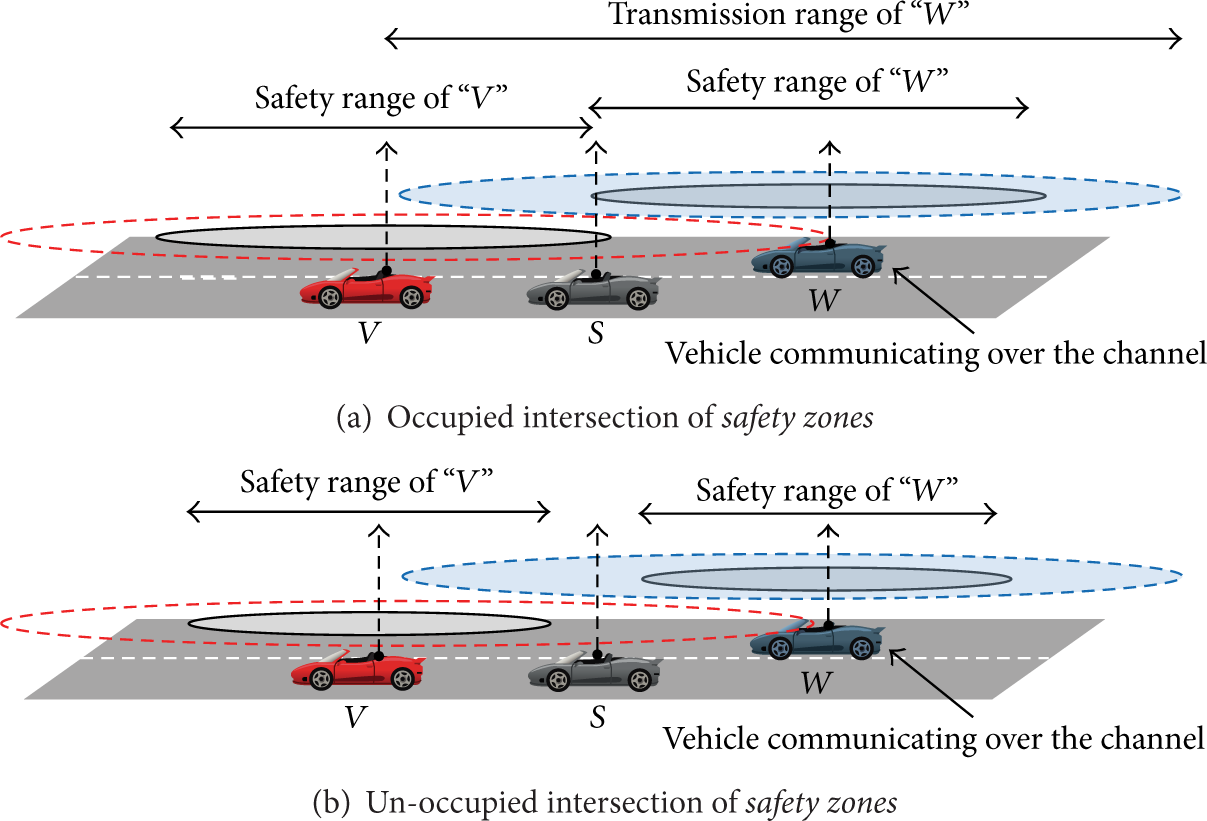
For the fixed packet reception probability p the number of successively lost packets N follows a geometric distribution that is given by



The authors investigated that adaptive transmission power control method is better if optimization on reception performance is required at specific distance. In case of varying the distance between vehicles, channel can efficiently be utilized if optimal
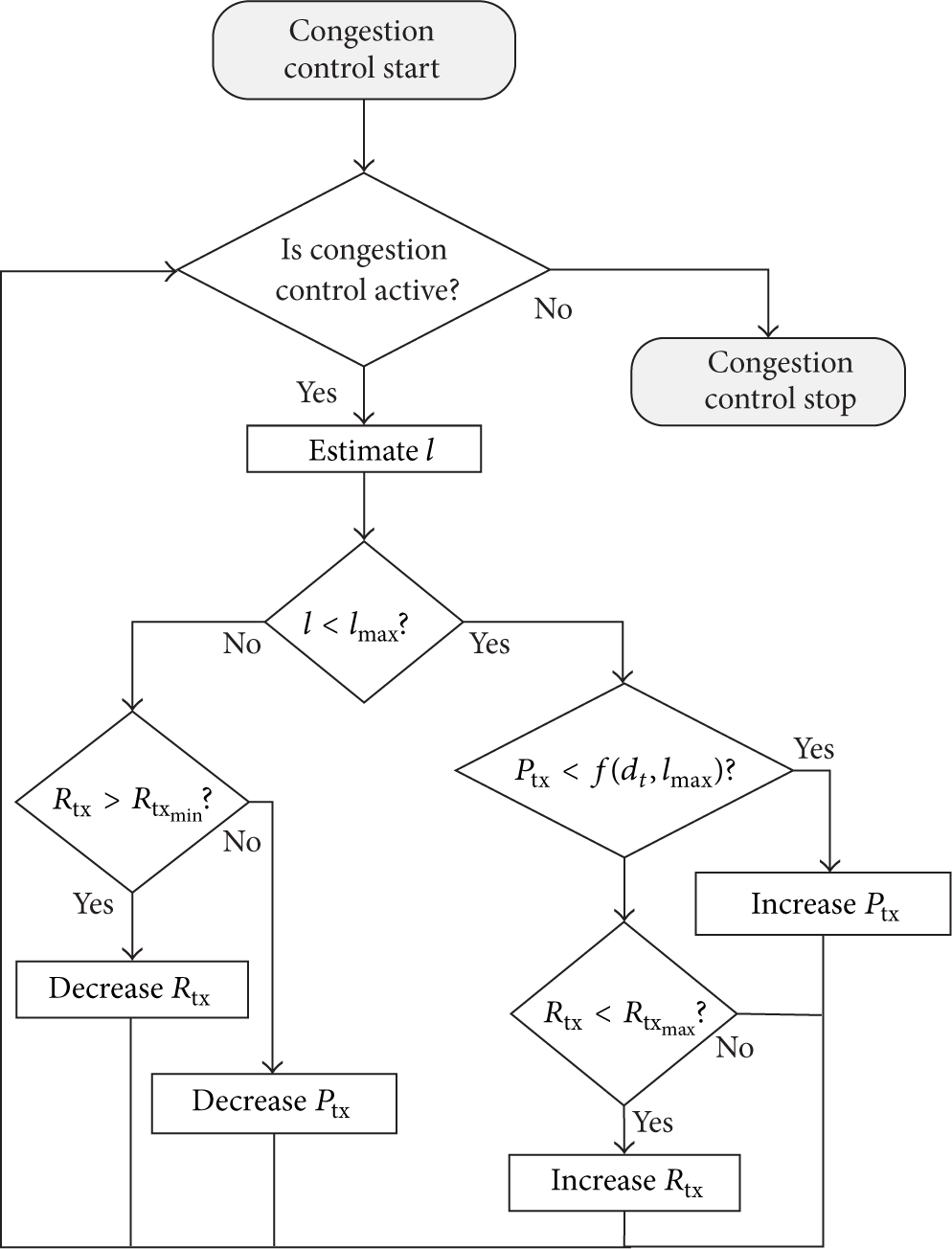
Joint
The following parameters are used by the algorithm: current, minimum, and maximum beacon transmission rates are denoted as
When congestion control mechanism is active, first it estimates the l. The
Simulations have been performed in NS-2.34 [50] for different combinations of
A very simple adaptive rate-rage congestion control scheme has been proposed in [49] that considers time headway metric to control beacon 
After successfully estimating the beacon
Performance evaluation of the proposed rate-range scheme is done through simulations in OPNET [51]. Packet success rate and channel busy percentage are used to measure performance of the proposed scheme for varying sender-receiver distances and vehicle densities, respectively. It is concluded by authors that the adaptive rate-range scheme has higher packet success rate and lower channel busy percentage than fixed rate-range scheme.
The above detailed discussion related to hybrid adaptive beaconing schemes is briefly summarized in Table 2. The main characteristics that we used to summarize include the following.
Hybrid adaptive scheme represents the reference to particular scheme. Classification shows the category where hybrid adaptive schemes lie. The hybrid adaptive schemes are further classified into subcategories based on the combination of parameters that they regulate. This includes any combination of transmission power, transmission power, and contention window size. Performance criteria are also known as performance metrics that are the basis to examine performance of the proposed schemes through simulations or experiments. The most notable performance metrics are throughput, end-to-end delay, packet loss, success rate, beacon reception rate, and so forth. Control parameters show the main parameters on which control or adaption decisions are taken. Control method describes the steps that schemes follow to adaptively regulate transmission power, rate, and/or contention window.
Qualitative comparison of hybrid adaptive beaconing schemes for VANETs.
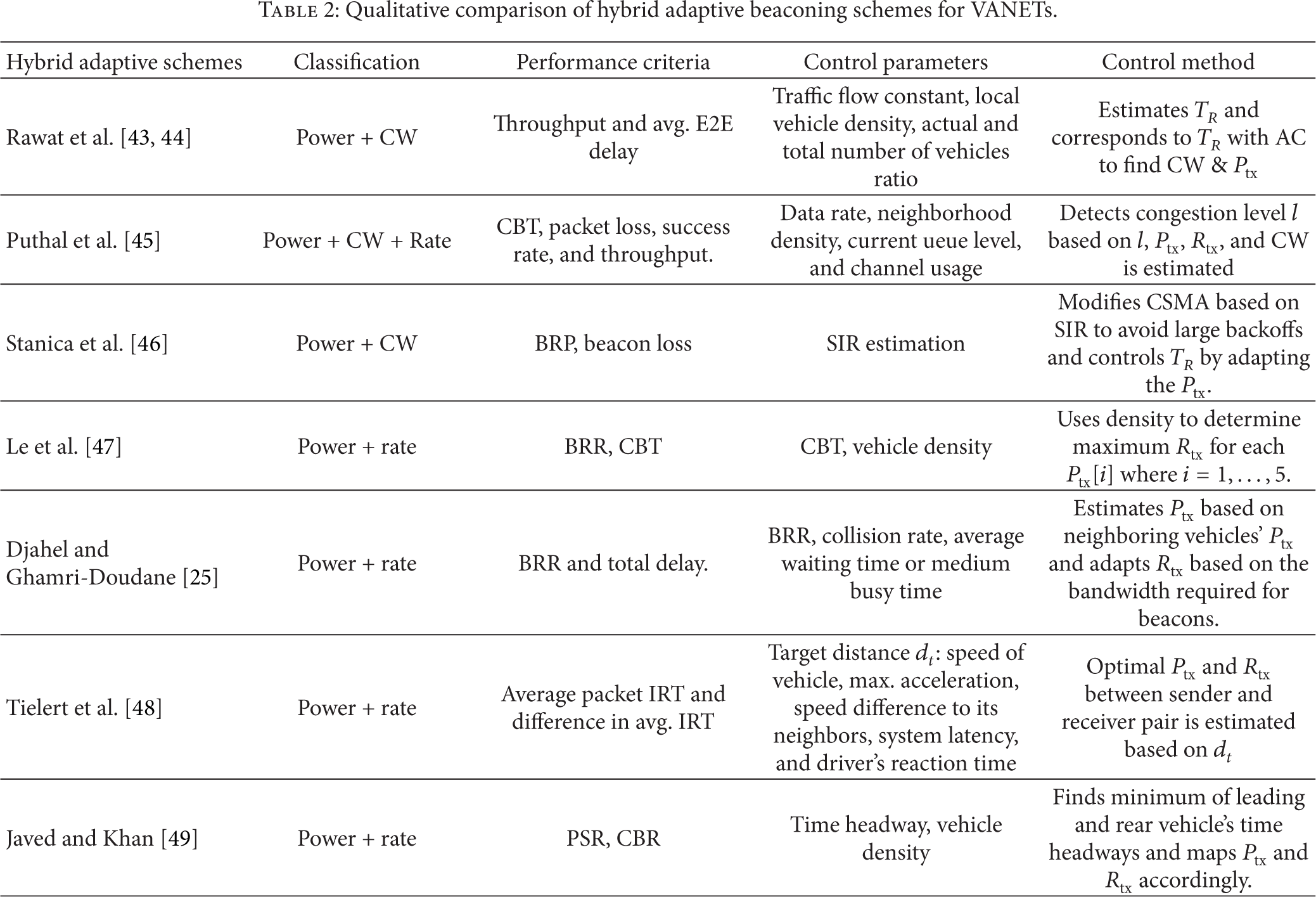
CBT = channel busy time, BRP = beacon reception probability, BRR = beacon reception rate, IRT = interreception time, PSR = packet success rate, CBR = channel busy ratio, and AC = access control.
In next section, we summarize simulation environment that has been used by the above said beaconing schemes.
4. Qualitative Analysis of Simulation Environment
In this section, we summarize the simulation aspects that are used by the hybrid adaptive beaconing schemes under consideration; refer to Table 3 in terms of various aspects that include the following.
Simulation tool: to evaluate performance of the proposed hybrid adaptive beaconing schemes, different simulation tools have been used by the authors. For example, network simulator (ns-2), an open source simulator, has been used in [43, 44, 47, 48] and OPNET (a proprietary software for network performance management) has been employed by [25, 49]. Beacon size: it is the total size of beacon message in bytes. This size may vary and depends on the type of information that it contains. The beacon size used in the simulations of hybrid adaptive beaconing schemes ranges from 100 to 512 bytes. Beacon rate: the amount of data or number of beacons per second sent in VANETs to evaluate efficiency of the proposed solutions. Usually, the beacon rate is 10 beacon/s and the rate adaptive schemes control beacon rate to reduce link congestion. Transmission power: the communication coverage area of a vehicle depends upon the transmission power. Increasing the communication area, at constant vehicle density and beacon rate, will result in more link congestion. Therefore, most of the power adaption schemes control transmission based on different network or link parameters to avoid link congestion. Network size: it is the total number of vehicles on the road segment or in area under simulation consideration; for example, [43–45] consider 150 and upto 1000 nodes, respectively. The other hybrid adaptive schemes in consideration [25, 46–49] use alternate parameter, called vehicle density. The vehicle density is the number of vehicles per unit area, for example, vehicles/km or vehicles/lane/km. Vehicle speed: as evident from the name, this parameter shows how fast vehicles are moving on the road. To check the efficiency of the schemes, authors consider varying vehicle speeds ranging from 12 to 30 m/s in their simulation. Traffic scenario: it is obvious that traffic pattern in rural, urban, and highway cases has different characteristics, for example, node density and speed range. The most common traffic scenarios that have been used in VANET simulations include highway, rural, urban, city, traffic light, and intersection.
Simulation environment and parameters used by hybrid adaptive beaconing schemes.

5. Open and Challenging Issues
The open issues and challenges to reliably broadcast safety and nonsafety related beacons in VANETs are briefly discussed in this section.
Concurrent transmission of safety beacons and nonsafety beacons without compromising the communication of any one is also a challenging issue in VANETs. Most of the schemes just defer transmission of nonsafety related beacons when safety messages are transmitted in a dense VANET environment. The reason behind this scarceness of the control channel bandwidth and efficient utilization of the control channel is still an open issue. The proposed beaconing solutions must be evaluated with a standard traffic scenario and parameters. It is evident from the survey that all previous solutions are analyzed with a completely divergent set of network parameters and scenarios. To set the standard network parameters and scenarios is a challenging issue because of varying driving habits and road conditions around the world. Most of the reviewed beaconing solutions considered unit disc transmission range, which does not hold true in the realistic vehicular environment as shadowing and different types of fading affects the radio propagation. Thus, it is necessary to adapt beacon power and rate by considering shadowing and fading effects of the channel. It is witnessed from the literature that most of the beaconing solutions in VANETs are simulated in unrealistic traffic scenarios, that is, a vehicular scenario without considering short-term and long-term fading. The difference between simulation and real-world field tests may result in a completely diverse network performance [53]. Therefore, the existing beaconing schemes may also need to be validated using real-world vehicular scenarios. Most of the beaconing schemes are proposed with a focus on improving the specific performance metric(s), for example, throughput, delay, reception rate, packet loss, channel busy time, and so forth. There should be a scheme that collectively improves overall network performance with minimum tradeoff. Beacon congestion estimation and control algorithms should be highly convergent to compute link and network status precisely. However, congestion detection is almost impossible without sharing frequent information among vehicles, which can further alleviate congestion. Broadcasting the time-constrained safety beacons in dynamic topology VANETs are one of the major challenges. Network parameters, that is, node density, speed of vehicle, neighborhood speed difference, and so forth, have a high impact on link congestion. Also estimation of these parameters in real VANETs is not possible because of the unpredictable nature of the network due to human factor involved. In addition, the next-generation networks aim to integrate distinct radio access technologies in order to provide seamless mobility and QoS anywhere and anytime. Thus, it is crucial to design efficient adaptive beaconing algorithms over different wireless access technologies such as WiMAX, 3G/LTE, WiFi, and the optimal selection of the suitable one among them in a heterogeneous vehicular network. Also the implementation cost of cellular communication systems is high as compared with infrastructure-based vehicular networks. In vehicular networks, the access points can be used as an intermediate node to relay data packets to other vehicles in multihop fashion. Thus, designing efficient beaconing for V2I in this environment can be used in various applications such as electronic toll collection, and road-side advertisement services.
6. Conclusion
In this paper, we performed a comprehensive study of state of the art hybrid adaptive beaconing schemes proposed for VANETs. The parameters on which these schemes optimize the combination of beacon power, rate, and/or CW, along with their working principles, are discussed in detail. Finally, the evaluation and simulation parameters are summarized in detail to easily insight the contrast between all schemes in literature. In addition, we also provide a list of open challenges and future directions, where we aim to motivate further research interest for existing beaconing constraints in VANETs.
Footnotes
Conflict of Interests
The authors declare that there is no conflict of interests regarding publication of this paper.
Acknowledgments
This research was supported by the MSIP (Ministry of Science, ICT & Future Planning), Korea, under the C-ITRC (Convergence Information Technology Research Center) support program (NIPA-2014-H0401-14-1004) supervised by the NIPA (National IT Industry Promotion Agency). This research was also supported by the Basic Science Research Program through the National Research Foundation of Korea (NRF) funded by the Ministry of Education, Science and Technology (2012R1A1A4A01009954).