
Abstract
The coexistence problem occurs when a single wireless body area network (WBAN) is located within a multiple-WBAN environment. This causes WBANs to suffer from severe channel interference that degrades the communication performance of each WBAN. Since a WBAN handles vital signs that affect human life, the detection or prediction of coexistence condition is needed to guarantee reliable communication for each sensor node of a WBAN. Therefore, this paper presents a learning-based algorithm to efficiently predict the coexistence condition in a multiple-WBAN environment. The proposed algorithm jointly applies PRR and SINR, which are commonly used in wireless communication as a way to measure the quality of wireless connections. Our extensive simulation study using Castalia 3.2 simulator based on the OMNet++ platform shows that the proposed algorithm provides more reliable and accurate prediction than existing methods for detecting the coexistence problem in a multiple-WBAN environment.
1. Introduction
A wireless body area network (WBAN) is a human-centered network providing communication among devices that exist in/on/around a human body. IEEE 802.15 Working Group organized IEEE 802.15 Tasking Group 6 in 2007 to establish the standardization for WBANs with the aim of simultaneously providing services for medical and entertainment applications [1].
Due to the limited bandwidth, the performance of WBANs suffers when multiple users occupy the same channel at the same time, referred to as the coexistence problem. This also causes received signal strength to decrease reducing channel capacity. As a result, packet error rate (PER) increases and packet reception ratio (PRR) decreases. PER is defined as the ratio of the number of incorrectly transferred data packets, where a packet is assumed to be incorrect if at least one bit is incorrect, and the total number of transmitted packets. On the other hand, PRR is the ratio of the number of received packets and the number of transmitted packets. Therefore, the coexistence problem increases retransmissions and delay, which decrease the channel utilization rate. Thus, it is important to avoid the coexistence problem by predicting it beforehand.
There are a number of algorithms that detect the coexistence problem based on estimating signal to interference plus noise ratio (SINR) [2–5]. However, estimating SINR using RF transceivers is inaccurate because of errors introduced by the analog circuitry. Therefore, these methods cannot accurately detect the coexistence condition. Furthermore, they neglect the fact that WBANs are human-centric networks. This means that the wireless environment changes frequently with users’ mobility and postural movement, and thus prediction algorithms based on instantaneous estimation of SINR are not reliable.
This paper proposes a learning-based method for predicting the coexistence condition in a multiple-WBAN environment. The learning-based algorithm is used to become aware of changes in the wireless environment and to improve the accuracy of the prediction algorithm. The proposed algorithm jointly applies PRR and SINR, which are commonly used in wireless communication to measure the quality of wireless connections. The learning process can be performed based on supervised and unsupervised learning methods which perform learning tasks with labeled and unlabeled data, respectively. Due to the huge complexity and low estimation accuracy, unsupervised learning methods cannot accomplish the estimation task efficiently in tiny sensor based networks such as wireless sensor networks and wireless body area networks. On the other hand, supervised learning algorithms are easily applied to WBAN because it performs the learning task based on the labeled training data and provides relatively high accuracy with low algorithm complexity [6, 7]. There are several supervised learning methods, for example, neural network, decision tree, and naive-Bayesian classifier. This paper employs the naive-Bayesian classifier because it has relatively low computational complexity and classifies the coexistence condition into four states: Static, Semidynamic, Dynamic, and None. (The specific learning process will be discussed in Section 3.)
The performance of the proposed method is compared with existing techniques using simulations. Our study shows that the proposed algorithm provides more reliable and accurate prediction performance than existing methods to detect the coexistence condition in a multiple-WBAN environment.
The rest of this paper is organized as follows. Section 2 provides the state of the art and the background related to the proposed method. The proposed prediction algorithm is presented in Section 3. Section 4 discusses the performance evaluation of the proposed algorithm. Finally, Section 5 concludes the paper and discusses future work.
2. Related Work and Background
2.1. Related Work
The coexistence problem has been actively researched for WBANs, which require high transmission reliability. There are a number of studies on the performance degradation of a WBAN in a multiple-WBAN environment [8, 9]. However, these studies only measure performance and do not provide an efficient detection or prediction schemes for the coexistence situation.
There are also studies on detection or prediction of the coexistence problem based on wireless transmission technologies, such as wireless local area networks (WLANs) and wireless personal area networks (WPANs). These existing studies target different communication layers. At the physical (PHY) layer, interference is detected prior to transmission, which is the most accurate way to check whether or not a channel is occupied by other users. However, a WBAN requires low power consumption and thus detecting signal power is not viable [10]. A number of methods [2, 3] use SINR or bit error rate (BER) to detect interference. However, an accurate judgment cannot be made with only a single SINR value because it may contain errors. Detecting whether or not received signal strength indicator (RSSI) exceeds a threshold is another way to check if interference exists. RSSI is useful for detecting interference between devices using different types of communication technologies that have a wide variation in signal power, for example, Bluetooth and WLAN [11]. At the medium access control (MAC) layer, PER is the criterion for detecting interference [12]. Finally, packet delivery rate (PDR) is used at the network layer. However, prediction of coexistence based on a single measured value at the MAC or the network layer is not reliable. Therefore, a reliable coexistence prediction model that considers interference characteristics at each layer is required for WBANs.
Due to the aforementioned limitations of the existing methods, this paper aims to provide an algorithm that jointly considers PRR and SINR to improve the accuracy of predicting the coexistence problem. In order to make the prediction algorithm robust to changes in the wireless environment, a learning-based scheme is applied to detect the coexistence condition based on measured PRR and SINR values.
2.2. Naive-Bayesian Classifier
Machine learning techniques are regarded as efficient solutions to improve the performance of adaptive algorithms by learning the patterns of specific factors. Supervised and unsupervised learning methods are particular cases that perform learning tasks with labeled and unlabeled data, respectively. Due to the huge algorithm complexity and low estimation accuracy, unsupervised learning methods cannot efficiently perform the estimation task in wireless networks. On the other hand, supervised learning algorithms are widely applied to wireless networks to estimate the variance of wireless resources and network environment [6, 7].
The naive-Bayesian classifier, which is based on the Bayes rule, is a widely used supervised learning method that exploits posterior probability calculation with a priori information. It performs the classification by counting the number of examples; therefore, it can provide relatively low computational complexity compared with the other supervised learning methods (e.g., neural network and decision tree) and can be easily deployed in sensor devices.
The naive-Bayesian classifier,

where

The prior probabilities
3. Proposed Algorithm
This section discusses the proposed learning algorithm based prediction scheme that can provide high prediction accuracy for the coexistence states.
3.1. System Model and Problem Description
Figure 1 shows the different multiple-WBAN environments, where each WBAN has a different moving speed and in turn influences the duration of the coexistence problem to other WBANs. IEEE Std. 802.15.6 classifies the coexistence condition based on the mobility level shown in Table 1. However, the standard does not clearly define the parameters, such as moving speed, that distinguish among these three states. Therefore, based on IEEE Std. 802.15.6, this paper quantitatively defines the coexistence states of Static, Semidynamic, and Dynamic scenarios using the time duration of interference,
IEEE Std. 802.15.6 defined coexistence environment.


Multiple-WBAN environment.
More specifically, the coexistence states are defined as follows.
Static (S) state indicates that there is a constant interference from other WBANs for a period with no mobility (the definition for time threshold will be given in the following section).
Semidynamic (SD) state indicates that there is a constant interference from other WBANs for a period with slow mobility.
Dynamic (D) state indicates that there is a temporary interference from other WBANs with fast mobility.
None (N) state indicates that there is no interference.
PRR and SINR are utilized as the classification feature variables for interference detection, and the coordinator node calculates average PRR and SINR values of received packets from the sensor nodes.
Pseudocode 1 shows the pseudocode for the proposed scheme. First, the average PRR value is compared with the PRR threshold (
(1) (2) PRR = True (3) (4) PRR = False (5) (6) (7) (8) (9) (10) (11) (12) (13) (14) State = NBClassifier (PRR, (15)
3.2. Training Data and Prior Probability
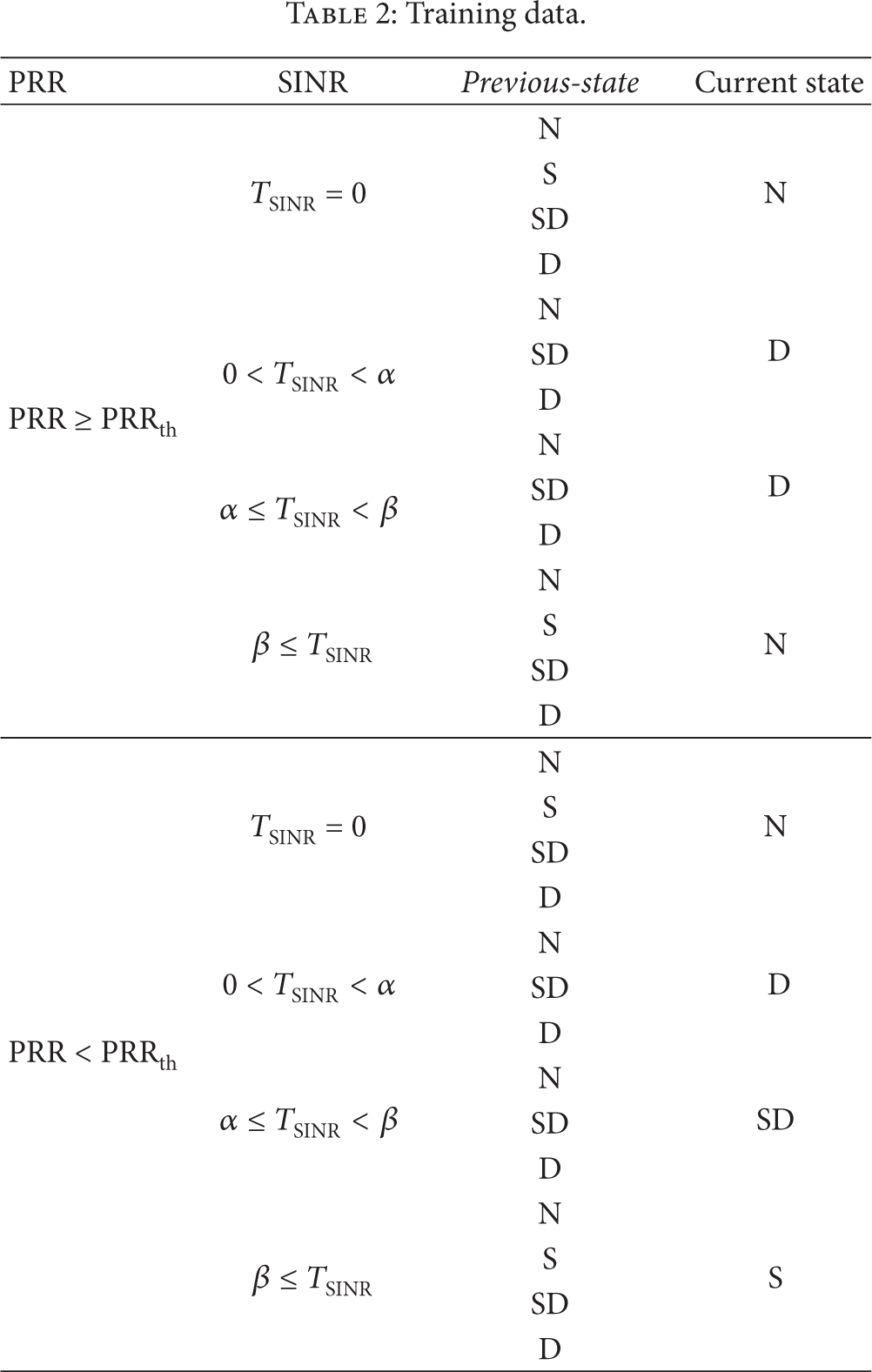
In the naive-Bayesian classifier, the classification algorithm needs to be trained with a set of training data. In general, the training data can be obtained from intuitive knowledge or accumulation of experiential information. In this paper, a set of experiments is performed for a variety of WBAN environments to obtain the labeled training data. These experiments are performed using ZigbeX II modules running an embedded OS and equipped with the CC2420 transceiver. For the implementation of a multiple-WBAN environment, a WBAN consisting of one coordinator node and four sensor nodes is interfered by sensor nodes belonging to the other WBANs.
The labeled training data is obtained using experiments and is shown in Table 2. For example, the labeled training data for the second row is obtained when
Training data.
The coordinator node calculates average PRR based on the number of dropped and received packets from the four sensor nodes. The number of dropped packets can be obtained by checking the sequence number of received packets. In addition, the coordinator node calculates average SINR based on measurements taken from the four sensor nodes using the equation shown below:

where RSS is the average received signal strength from the sensor nodes and RIS is the received interference signal strength from other WBANs and n is the noise level measured at the coordinator node.
In order to generate the training data, we performed experiments for four types of interference cases. In the first case, there is no interference in order to evaluate the None state. In the second case, there is a fixed interfering node that affects the WBAN's communication in order to evaluate the Static state. In the third and fourth cases, the interfering node moves at 0.5 m/s (slow) and 1.5 m/s (fast) to evaluate the Semidynamic and Dynamic states, respectively. Each case is performed 5 times and then average PRR and
The experimental results for different coexistence conditions are shown in Figure 2. None 1 and None 2 represent the results for the first case, where the transmission rate of None 2 is two times higher than None 1. Dynamic 1 and Dynamic 2 represent the fourth case, where the interfering node of Dynamic 2 is closer to the subject WBAN than Dynamic 1. These experimental results show that the current state can be derived based on the previous measured data and exhibit the following characteristics.
Static state: Figure 2(b) shows that average SINR values are relatively stable and less than 0 dBm. Therefore,
Semidynamic state: Figure 2(a) shows that average PRR value is lower than 90%. Moreover, average value of SINR is less than
Dynamic state: Figure 2(a) shows that PRR values may be higher or lower than
None state: Figure 2(a) shows that PRR values may be higher or lower than
Therefore, the training data used to classify the current state in Table 2 can be obtained from analyzing PRR and

Average PRR and SINR values according to the coexistence condition.
3.3. Naive-Bayesian Classifier Application
The naive-Bayesian classifier defined in (2) accepts the measured values PRR,

More specifically, the probability that the current state is Static
Similarly, the probabilities that the current states are Semidynamic, Dynamic, and None are calculated as follows:
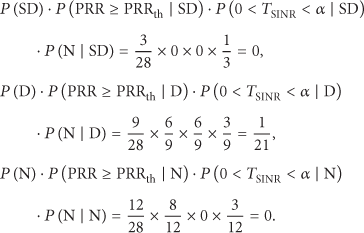
Based on these results, Dynamic is chosen as the most likely state for the current state.
4. Performance Evaluation
4.1. Simulation Model
This section presents our simulation study using the OMNeT++ platform, which is a modular simulation library for studying wired and wireless communication networks, to evaluate the performance of the proposed algorithm. In our simulation environment, a single WBAN consists of one coordinator node and four sensor nodes (i.e., Node 1, Node 2, Node 3, and Node 4), which are located 1 m from the coordinator node as shown in Figure 3.

A single WBAN.
In a WBAN, PRR is calculated by the coordinator node based on the average number of received packets from the four sensor nodes. SINR is obtained from RSS measurements taken directly from the four sensor nodes using (3) as described in Section 3.2, and then
In the simulation, all nodes use CC2420 transceiver that operates in the 2.4 GHz frequency band and the transmit power is fixed at −3 dBm. The packet transmit rate is set to 10 pkts/s and 5 pkts/s, and
Figure 4 shows our simulation environment, which reflects the situations where multiple WBANs exist in the same area. There are 19 WBANs in the simulation area of 24 m × 16 m. Due to the fact that mobility is relative, the subject WBAN (M-BAN1) is mobile while the other 17 WBANs (BAN3–BAN17) are static and act as interfering WBANs. Moreover, in order to provide a more general simulation environment, another mobile interfering WBAN, M-BAN2, is introduced to simulate interference from mobile as well as static WBANs. The simulation area is subdivided into six 8 m × 8 m regions, which are indicated as R1–R6 in Figure 4, and different densities of WBANs are deployed to different regions. In regions R1 and R4, there is no static interference. On the other hand, the subject M-BAN1 suffers from high interference in region R3 and low interference in regions R2 and R5. The region R6 is used to record the initial Previous-state.

Simulation area.
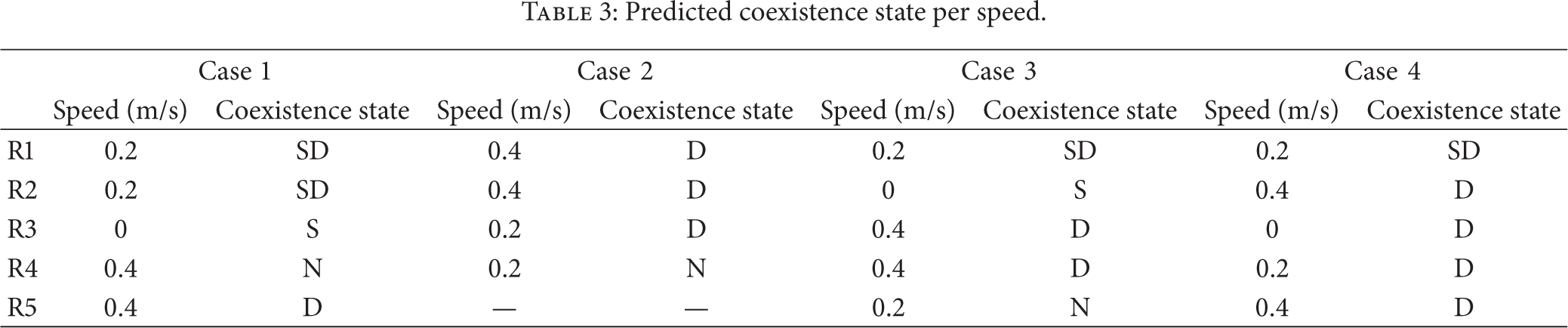
In order to evaluate the performance of the proposed algorithm for various types of interference, four simulation cases are tested based on the moving speeds of M-BAN1 and the interference node density. Case 1 and Case 2 have 17 fixed interfering WBANs, and Case 3 and Case 4 have 17 fixed interfering WBANs and one mobile interfering M-BAN2. The subject M-BAN1 moves along the path shown in red at speeds of 0 m/s, 0.2 m/s, and 0.4 m/s. On the other hand, static interfering WBANs are positioned at fixed locations indicated by dots, and the mobile interfering M-BAN2 moves along the path shown as a dotted red line at 0.4 m/s. While the subject M-BAN1 moves, the coordinator node gathers information and calculates the current values of PRR and
Table 3 shows the different moving speeds of M-BAN1 for the four cases, and the correct coexistence state is labeled based on moving speeds of M-BAN1 and interference density. For example, the data in the first row, first column (i.e., 0.2 m/s), indicates the moving speed of M-BAN1 in region R1. During this time, M-BAN1 experiences low interference and its moving speed is slow; thus the correct state is Semidynamic.
Predicted coexistence state per speed.
4.2. Simulation Result
The coordinator of M-BAN1 measures average PRR and
Simulation results of PRR and

Based on analyzing the simulation data shown in Table 4, we find that even though the value of PRR is sensitive to M-BAN1's moving speed, it does not reflect the interference characteristic. For example, the data in the second row of Table 4 shows that PRR increases significantly as moving speed increases from 0.2 m/s to 0.4 m/s for Case 1 and Case 2. This is also similar for Case 3 and Case 4. However, it is difficult to distinguish the coexistence states by comparing just the PRR value for Case 1 and Case 3, where the correct states are Semidynamic and Static, respectively.
Table 5 compares the predicted states using PRR,
Performance result.

In summary, Table 5 shows that the accuracy is 69% when prediction is performed using a single value of
5. Conclusion
This paper proposed a prediction algorithm for detecting the coexistence problem by applying PRR,
Footnotes
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Acknowledgment
This research was supported by Basic Science Research Program through National Research Foundation of Korea (NRF) funded by the Ministry of Education (NRF-2013R1A1A2059741).