
Abstract
Recent trend shows that sensors situated on an axis in two-dimensional scenario measuring the time difference of arrival (TDOA) and frequency difference of arrival (FDOA) of the emitting signal from a moving source can estimate the emitting signal's position and velocity from the intersection point of hyperbola, which derives from TDOA and FDOA. However, estimating the location of an emitter based on hyperbolic measurements is a highly nonlinear problem with inconsistent data, which are created due to the measurement noise, the deviation between assumption model and actual field of the velocity, and so forth. In addition, the coefficient matrix of TDOA and FDOA equations set is singular in the linear sensor array network (LSAN). In this paper, a noniterative and simpler method is proposed to locate the instantaneous position of the moving source in LSAN by estimating the position and velocity based on TDOA and FDOA which does not have the convergence problem. In addition, the method avoids the singularity problem of LSAN by introducing the nuisance variables. The proposed method achieved the theoretical lower bound for near to far field with same and different velocity and different baseline of sensors in low to moderate noise.
1. Introduction
In recent decades, localization awareness has aroused great interest in wireless sensor network (WSN) applications, such as in tracking the mobile, homeland security, defense command and control, ship navigation, and disaster management [1–6]. The instantaneous position of signal emitter is determined by using relative position information as bearing [7], distance, received signal strength (RSS) [8], received signal strength ratio (RSSR) [9], time of arrival (TOA) [10], and time difference of arrival (TDOA) [11] of sensors which capture the signal from the source in WSN. In this paper, the source position was estimated through a passive localization technique, called TDOA, represented in Figure 1 as this technique does not require timestamping. Furthermore, it is easy to implement in the practical localization set-up [12]. For the moving source, velocity estimation applies the vital rule for instantaneous localization of the source [13]. Hence, frequency difference of arrival (FDOA) was combined with the TDOA for improving the localization accuracy of mobile source [14, 15]. Two types of geometrical shapes of sensors in WSN were used, namely, arbitrary sensor array network (ASAN) and linear sensor array network (LSAN). In ASAN geometry, the two-step weighted least square (LS) method was derived in [14] to estimate the position and velocity of moving source based on TDOA and FDOA. Furthermore, an accurate and closed-form solution was proposed based on multidimensional scaling (MDS) analysis that optimized a cost function related to the MDS's scalar product matrix in [16]. In addition, a closed-form of LS estimation was derived for circular array sensor network in [17]. An analytical solution for cuboid network without premeasured wave velocity was proposed in [18]. Another LS method in [19] and an effective closed-form solution in [20] were derived to locate the mobile source position by considering the source and reference sensor motions which create ASAN. Most of the source localization algorithms are for estimating the position of stationary sources. A stationary source localization algorithm using LS estimation that utilized the multiple-input multiple-output radar system with widely separated antennas was derived in [6]. Also, a noniterative method with comparative performance based on TDOA for Global Positioning System (GPS) was proposed in [21, 22]. In this paper, we have focused our research based on the LSAN to locate the position and velocity of moving source at near to far field.

TDOA based localization technique in LSAN.
It has been found from the literature that the TDOA and FDOA equations with high nonlinearity form hyperbolas, which may not be intersected at a single point due to the inconsistent data, such as measurement error and the deviation between assumption model and actual field of the velocity, in LSAN [14, 23]. Also, the singularity problem arises in the coefficient matrix of hyperbolic equations set in 2D LSAN [23, 24]. To overcome the challenges in the 2D scenario, a mathematical solution by approximate ML estimation based on TOA was developed in [25], which was only applicable for three linear sensors. Additionally, the ML estimation in [26], a closed-form of LS estimation in [19, 23], and the geometric solution in [23] were proposed based on the TDOA to predict the position of stationary source in LSAN.
Moreover, the trigonometric mathematical approach in [5] was derived to estimate the position of a moving source in LSAN for only a special case where the range between the source and receivers was large compared to the spacing between receivers (far field). To the best of the authors' knowledge, no literature has been found with the linear sensor array in a 2D scenario for estimating the position as well as velocity of near to far field moving emitter. In the 2D scenario for LSAN, each element in the array lies in same axis [23]. The coordinate of the source position in that axis is also absent in the nonlinear equation set. Hence, coefficient matrix of the LSAN is singular [24]. For overcoming these issues, we have proposed a mathematical approach based on TDOA and FDOA to estimate the position and velocity of a moving source in LSAN. In this paper, we simulated the proposed method to estimate the position and velocity of moving source at near to far field with the same and different velocity in LSAN where Gaussian noise is considered.
The paper is arranged in the following manner. In the following section, the proposed mathematical model is presented. Next, the derivation of Cramer-Rao lower bound (CRLB) is provided. After that, the results are analyzed and performance evaluation is explained. Then, the limitation and future work are discussed. Finally, the concluding remarks are provided.
2. Proposed Method
The N linear stationary sensors of LSAN are considered in a 2D space to estimate the locomotive emitter with unknown position



Equation (3) is a nonlinear set with unknown p and

Source position estimation by the hyperbolic technique.
Not only the position but also the velocity estimation is essential for determining the instantaneous position of moving emitter. Conversely, TDOA equations set may not be adequate to provide the needed localization accuracy of moving emitter as TDOA estimates only the position of the source. The FDOA measurement which is obtained from the relative velocity between the source [13] and sensors is applied to improve instantaneous localization accuracy of the source. The relation between the path rate and source position parameters is obtained by the time derivative of (1) as follows:












3. Cramer-Rao Lower Bound
It is important to know the optimum achievable localization accuracy that can be attained with the available measurement set. The CRLB provides a lower bound on the covariance that is asymptotically achievable by any unbiased estimation algorithm [14]. Therefore, the CRLB sets a benchmark of an unbiased estimation, which has been compared with the proposed method. However, the CRLB is equal to the sum of the diagonal elements of covariance matrix estimation. To estimate the covariance matrix of source position and velocity in LSAN based on the TDOA and FDOA, we perturbed the random quantities in θ mentioned as auxiliary vector and proceed as before to obtain the following [23]:




4. Results and Discussion
Simulation results to estimate the position and velocity based on TDOA and FDOA in LSAN for 2D scenario are presented in this section. The sensors positions are (
The MSE of position and velocity estimation of the proposed method against Taylor's series method and CRLB is represented in Figure 3 at the noise levels −100 dB to −5 dB. The position and velocity estimation through the proposed method reaches the CRLB, when the noise is below −30 dB. The proposed method diverges from CRLB with an increase in the noise level starting from −30 dB. The MSEs in both position and velocity of the proposed method are 1.005, 1.21, and 2.85 times higher than the CRLB at noise level −80 dB, −25 dB, and −5 dB, respectively. Below −35 dB noise, the ratio of the proposed method varies between 1.005 and 1.05 against CRLB. It should be noted here that Taylor's series method is also simulated for comparison with the proposed method in the same simulation environment. This method uses truncated Taylor's series expansion (avoiding the higher order terms) to linearize the TDOA and FDOA nonlinear equations with iterative solution. The MSEs of the emitter by Taylor's series depended on the initial guess. Also, they only converges to the local minimum solution. Hence, it gives good position and velocity accuracy when the initial guess is also approximate with actual position and velocity of the emitter at very low level noise. On the other hand, the MSEs are large compared to proposed method. Now, to avoid the initialization limitation of Taylor's series, 1.2 times of actual values of position and velocity are assumed as the initial values of source position and velocity. In this case, a minimum of 4 iterations is needed for each solution when the noise is less than −40 dB. The deviation of Taylor's series results from CRLB starts from −40 dB noise. The iteration number and the deviation increased with the increment of the noise level. The MSE of Taylor's series is higher than the proposed method and CRLB, which is shown in Figure 3 for position and velocity estimation of moving source.
Comparison of (a) position and (b) velocity MSE of the proposed method with Taylor's series and CRLB for near field.
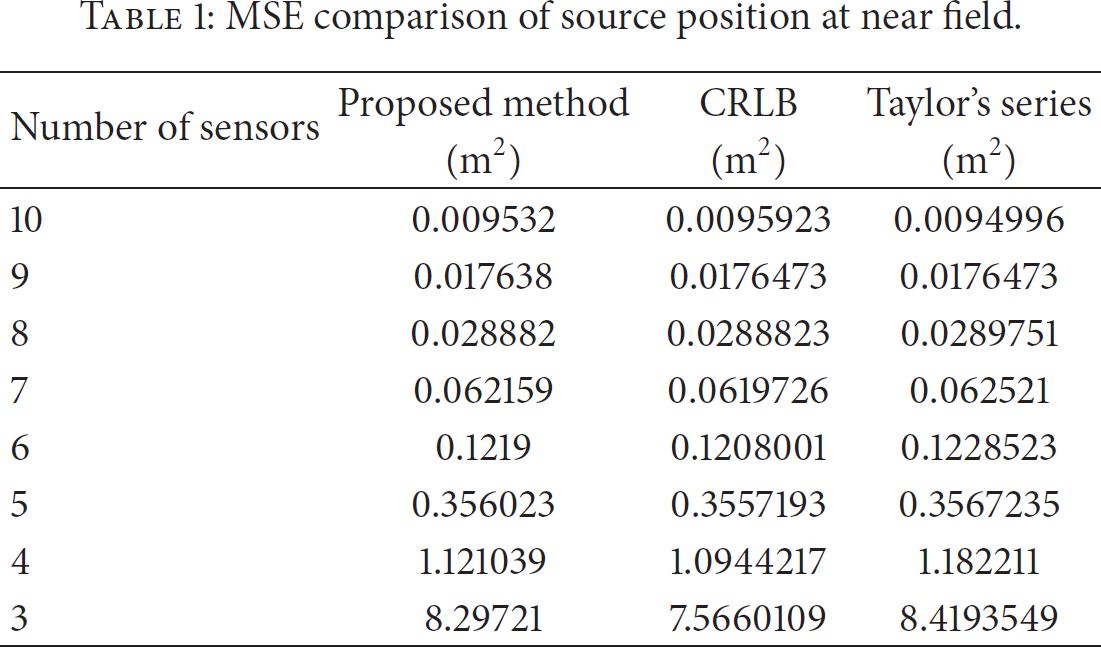
The MSE comparison of source position and velocity estimation at near field for the proposed method, Taylor's series, and CRLB at noise −40 dB is represented in Tables 1 and 2, respectively, where the number of sensors in LSAN is varied. At 10 sensors in LSAN, the MSE of Taylor's series is slightly less than the CRLB and proposed method due to the low effective noise level. Tables 1 and 2 show that the MSE at the near field source position and velocity reduced with the increment of a number of sensors. In addition, the deviation rate of Taylor's series from CRLB is higher than the proposed method at 7 to 3 sensors and 8 to 3 sensors for position and velocity estimation, respectively.
MSE comparison of source position at near field.
MSE comparison of source velocity at near field.

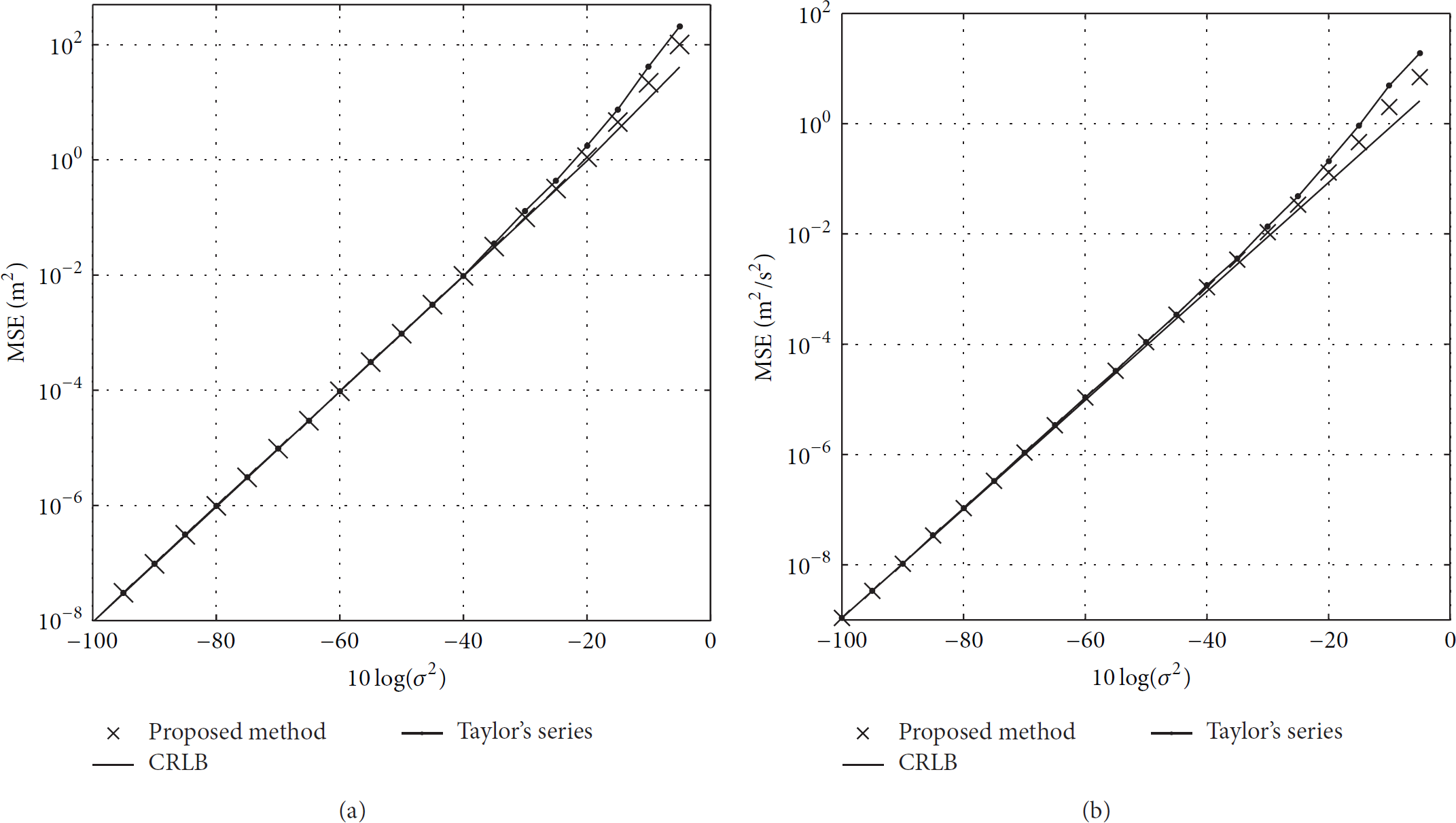
Figure 4 shows the obtained MSE estimation of position and velocity at far field using the proposed method, Taylor's series, and CRLB at noise ranges from −100 dB to −20 dB. The MSEs of the proposed method, Taylor's series, and CRLB are almost same, that is, below −50 dB noise. After −50 dB, the MSE of the proposed method and Taylor's series becomes higher with an increment in noise. However, the rising slope of the proposed method (position and velocity estimation of distant sources) is less than Taylor's series, which is clearly depicted in Figure 4.

Comparison of (a) position and (b) velocity MSE of the proposed method with Taylor's series and CRLB for far field.
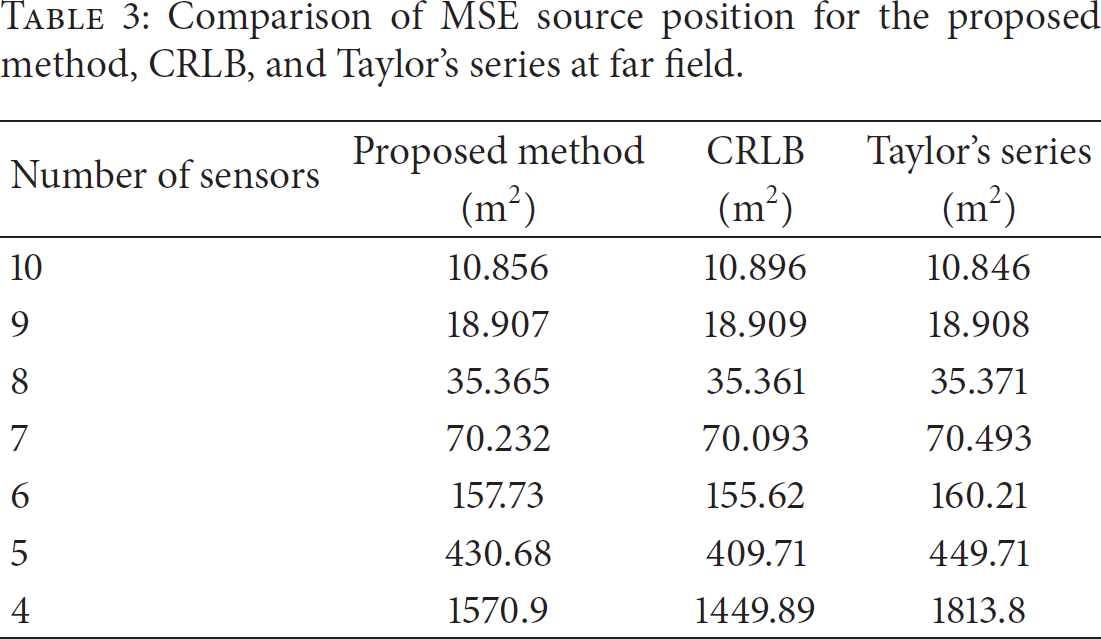
The MSEs of far field source position and velocity estimation differ through variation of the baseline of LSAN, as illustrated in Tables 3 and 4. In this simulation, −50 dB noises are considered. The true baseline of LSAN is decreased by reducing the number of sensors from the network. Also, the comparative baseline (ratio of the true baseline and the range between source and sensor network) of LSAN decreases. In addition, direction control becomes weaker and weaker due to the reduction of true baseline. Here, it describes the accuracy of the position and the velocity for a pair of sensors and is mostly limited to one direction, which is parallel to these two sensors and perpendicular to the LSAN [29, 30]. Hence, the large variation of position and velocity is observed. Most interestingly, it can be observed from Tables 3 and 4 that the MSEs of position and velocity are too large when the number of sensors is three due to the too weak direction control. In addition, the MSEs of Taylor’ series are significantly larger than the proposed method when the number of sensors is less (4 or 5) due to its linearization errors [23, 31]. The baseline of the network increases with increasing the number of sensors; as a result, the linearization error reduces. In addition, favorable initial guess is also needed for Taylor's series. In practice, this is not possible and solution divergence may occur.
Comparison of MSE source position for the proposed method, CRLB, and Taylor's series at far field.
Comparison of MSE source velocity for the proposed method, CRLB, and Taylor's series at far field.

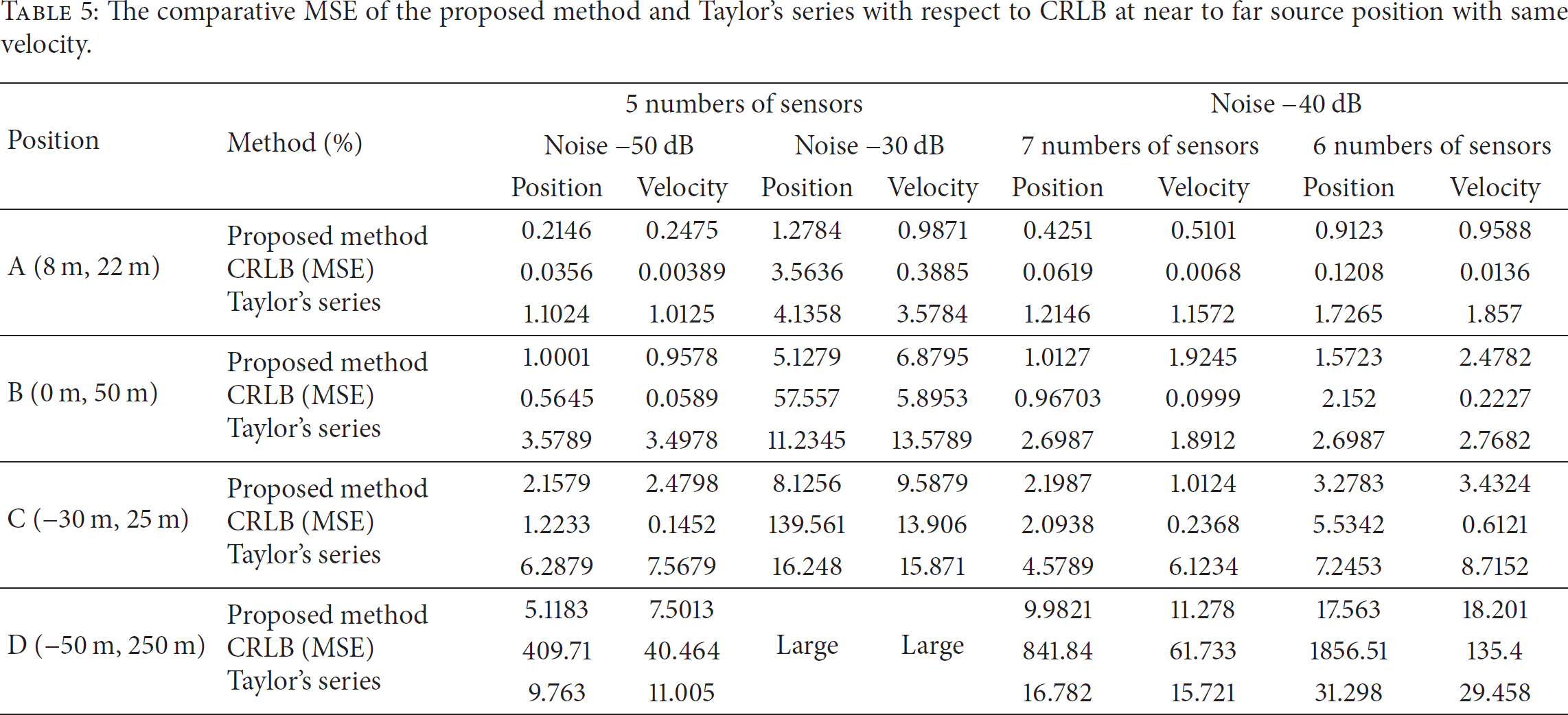
The comparative position and velocity MSE of the proposed method and Taylor's series with respect to theoretical position and velocity MSE are presented in Table 5 where different source positions A, B, C, and D and same velocity V1 for all source positions are considered. First of all, the deviation percentages of positions are 2.15% and 6.28% (when noise is −50 dB and the number of sensors is 5 in LSAN) and the deviation percentages of velocity are 2.47% and 7.56% for the proposed and Taylor's series, respectively, at source position C. In addition, the results of position and velocity obtained for the proposed method are 0.5 and 0.6 times Taylor's series at position C when noise is −30 dB. Secondly, six and seven numbers of sensors in LSAN at noise −40 dB are also considered to measure the comparative position and velocity MSE in Table 5. Here, the deviation of MSE percentage of Taylor's series is 2 to 5 times compared to the proposed method. Moreover, the deviation percentage goes higher with the reduction of the number of sensors in LSAN.
The comparative MSE of the proposed method and Taylor's series with respect to CRLB at near to far source position with same velocity.
The position and velocity MSE's results of the proposed method and Taylor's series with respect to the theoretical MSE are observed at −40 dB noise and 6 numbers of sensors in LSAN where combination of different positions and velocity of sources are considered in Table 6. For all cases, the proposed method's results are found to be 2 to 3 times better than Taylor's series. In addition, the deviation percentage of position MSE is marginally increased through the increment of the source velocity. It is to be noted that the deviation percentage of velocity MSE is higher than the deviation percentage of position MSE.
The comparative MSE of the proposed method and Taylor's series with respect to CRLB at near to far source position with different velocity.
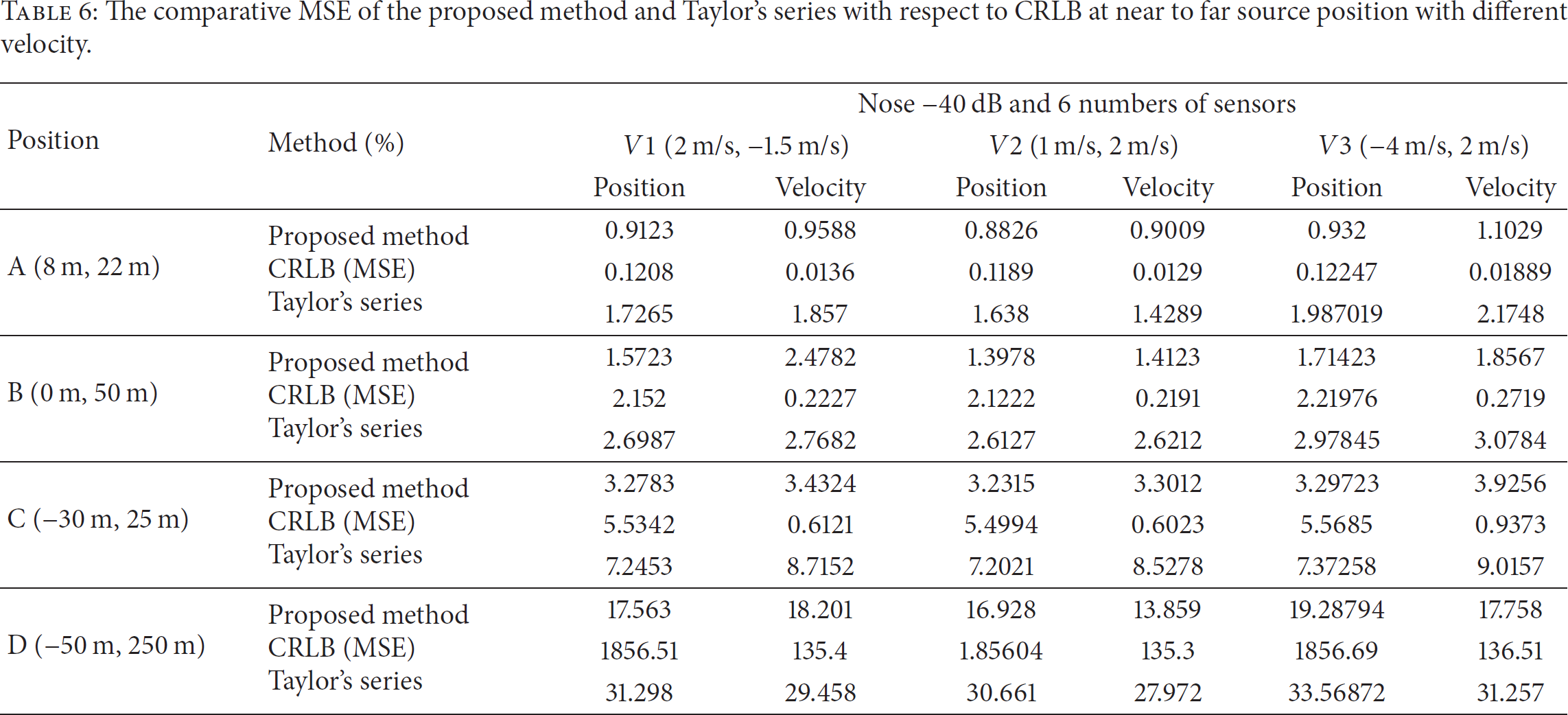
The most interesting observation from Tables 5 and 6 is that the MSE at source position C is larger than at position B despite the long distance between the source position B and network. This happens because (1) the source C is situated behind the outside to LSAN where the control of x-direction is extremely weak and (2) the source B is on the perpendicular line of the LSAN. Therefore, the source position and velocity will be undefined when it is on the axis, but outside (either left or right) of the LSAN. On the other hand, the source position and velocity will be effectively estimated when its position is on the perpendicular line of the LSAN [29, 30].
In conclusion, it is apparent that the MSE of position and velocity of the far field source is higher than the near field because of the geometric spreading that is the ability to estimate the position and the velocity of emitter becomes weaker and weaker as the position moves away from the sensor network [29, 30]. In our simulation results, the proposed method yields better results than Taylor's series due to the initialization problem, local minimum solution, linearization errors, and so forth, of Taylor's series. Therefore, the proposed method in close proximity with the CRLB from near to far field source with same and various velocities and different baseline of network at varying noise levels.
5. Conclusion
The nonlinear localization equations set, measurement noise, and singularity problem in LSAN pose the challenges to locate the position and velocity of the locomotive source in the 2D scenario based on TDOA and FDOA measurements. To overcome these challenges, nuisance variables are introduced in this study. These variables have contributed to avoidance of the singularity problem of LSAN in nonlinear localization equations set and to improvement of the instantaneous source location estimation. The proposed method is found to be noniterative, of low complexity, and attractive and does not have convergence problem and initialization problems, as in Taylor's series. The proposed method accomplished the CRLB for low to moderate noise level in case of moving source, which is positioned at near to far field with same and different velocity under the Gaussian noise.
Footnotes
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Acknowledgments
This research work is supported by the ERGS fund (ER011-2013A), Ministry of Education (MOE), Malaysia, and University of Malaya Research Grant (UMRG) scheme (RG286-14AFR).