
Abstract
Indoor localization on smartphones is an enabler for a number of ubiquitous and mobile computing applications attracting worldwide attentions. Many location-based services rely on WiFi fingerprinting approaches to achieve a reasonable accuracy. However, there is still room for improvement due to the prevalent-existing errors (e.g., 8∼12 m). In this study, we devise and implement a high-accuracy indoor localization solution leveraging the WiFi-based method and pedestrian mobility provided by smartphones. Our basic idea is that WiFi-only localization can generate rough but absolute positions, while user motion is able to bring accurate but relative locations. Taking both sides into account simultaneously, we design techniques to refine the raw WiFi positions in the process of laying the precise local trajectory appropriately down to the absolute coordinate using a novel least median of squares (LMS) fit algorithm. We develop a prototype system, named TraIL, and conduct comprehensive experiments in a building along different shaped routes. The evaluation results show that TraIL can achieve 80% improvement on average error with respect to WiFi-only indoor localization.
1. Introduction
In many mobile computing applications, location-based service (LBS) has become an indispensable element. Indoor localization on a smartphone has prospered in the past two decades in both academia and industry. However, current smartphone-based indoor positioning system is not satisfactory enough to locate or navigate a user [1–3], requiring significant accuracy improvement.
Different from GPS as a dominating solution for outdoor localization, there is a variety of techniques when the issue comes to the indoor environment. WiFi-based RSSI fingerprinting schemes can achieve a reasonable accuracy (e.g., 3~4 m), but large errors (e.g. 8~12 m) still exist [4]. A plethora of academic works seek for assistance from other means, such as precise ranging [5, 6] and peer devices [7] to improve accuracy. However, these extra requirements may result in the loss of ubiquity held by original WiFi localization. Emerging research on leveraging user motion attracts growing attention [7–12]. These works all leverage user motion and WiFi-based technology; however, one means is usually treated as an auxiliary to another. It still remains a research challenge to take advantages of both sides' strengths.
In this paper, we propose TraIL, a trajectory-oriented indoor localization system implemented on off-the-shelf smartphones. We reveal the rationale behind TraIL from two basic observations: WiFi-based methods can provide coarse-grained but absolute positions, while pedestrian mobility is able to offer accurate but relative locations. TraIL adopts an RSSI fingerprinting-based localization method for the absolute coordinate generation; in relative coordinate the user's trajectory can be treated as a rigid graph holding the shape feature of the route. Having both relative and absolute coordinates, we devise a coordinate transformation scheme converting the former to the latter. Speaking of the coordinate transformation, we draw lessons from LMS fit [13] and exert its strong merits of maintaining the rigid core and immunizing against outliers to the utmost. To sum up, the raw WiFi positions are refined, in the process of laying the local trajectory faithfully down to the absolute coordinate, as shown in Figure 1.

An illustration with both absolute and relative trajectories.
To evaluate our design, we implement a prototype system on Android OS using HTC One phones and execute a series of experiments. The results demonstrate that the maximum and mean errors are reduced to 4 m and 2 m, respectively. Around 80% enhancement in indoor localization proves the feasibility of TraIL in real world deployment [14, 15].
We summarize our contribution as follows.
We identify both WiFi-based scheme and pedestrian mobility of equal importance for indoor localization. TraIL can work on a single smartphone without the assistance of other peers, or additional constraints, thus forming a self-contained system. We develop a novel approach to generate the local trajectory. TraIL delivers a motion state and an acceleration measurement to the Kalman filtering process, thus achieving a precise velocity estimation. We introduce the LMS fit algorithm to coordinate transformation. It can cope with the unexpected outliers appearing in WiFi indoor localization due to the merit in preserving more core regions.
The rest of this paper is organized as follows. Section 2 reviews the related literature. We introduce the system design of TraIL in Section 3. In Section 4, we propose a novel user motion estimation scheme for local trajectory generation and employ a WiFi-based localization technique for absolute coordinate generation. Coordinate transformation algorithm is detailed in Section 5. We discuss the system performance in Section 6 and conclude this work in Section 7.
2. Related Work
Indoor localization is studied extensively in pervasive and mobile computing literature. We review the state-of-the-art works most relevant to ours.
2.1. WiFi-Based Localization
The main stream of indoor localization approaches leverages RSSI fingerprinting, such as [16, 17], HORUS [4] and Landmarc [18]. However, this technique takes effect on condition that fingerprints differ from each other among those reference locations, which cannot always be held ideally.
2.2. User Motion-Assisted Localization
Off-the-shelf smartphones, mounted on the stage as a popular mean in localization approaches, provide a plethora of user motion information. There are considerable literature in this area lately [8–12, 19].
Under this context, the most relevant works to ours are [8] and GloCal [19]. In [8], the approach is to determine the absolute location of a pedestrian given a path of step events describing their relative movement and a map of environment. However, foot-mounted IMUs are less pervasively available than smartphones, leaving system deployment difficult.
2.3. Coordinate Transformation
Coordinate transformation using least squares (LS) methods is well known in computer graphics. Particularly, Horn's method is selected into the previous work GloCal using a set of translation, scaling, and rotation operations. For further improvement, least median squares (LMS) fit is taken as an attractive perspective to solve various superposition problems [13], as well as coordinate transformation. We absorb the merits of these two means to solve the transformation problem to our satisfaction. To deal with more outliers in WiFi-based methods, our approach leverages the LMS fit-based coordinate transformation explained later, to make the system insensitive to outliers.
3. System Overview
In this section, we present the system architecture of TraIL, with the problem statement of indoor localization assisted by user motion.
As shown in Figure 2, the working process of TraIL consists of two main parts: coordinate generation and coordinate transformation. The WiFi-based method collects absolute locations and sensor readings forge a relative trajectory representing the user motion information.

System architecture of TraIL.
After raw inertial sensor data are transferred into relative coordinate generation operator, forward speed and rotational angular are first estimated by accelerometer and gyroscope, respectively, following the algorithms explained in Section 4. Accordingly, displacement and direction become attainable naturally, delineating our local trajectory together. On the other side, when treating rough locations from WiFi as absolute positions, the TraIL fixes the user traces on the floor plan determinately.
Learned from Figure 1, the relative locations from dead-reckoning preserve a better structure of the actual trajectory than WiFi-based trace. Thus, our aim is to assign the absolute positions to the local trajectory; in other words, place the relative curve properly on the absolute coordinate. We adopt a superposition algorithm to achieve a more precise fitting by improving conventional LS means with robust LMS. Finally, all absolute locations along the user trace are refined with the transformed relative locations.
4. Trajectory Generation
We introduce two components of trajectory generation which are local and absolute ones in this section. The local trajectory is curved by the smartphone-driven dead-reckoning method and the absolute one is depicted by the WiFi-based indoor localization technique.
4.1. User Motion Estimation
Offset and turning are two essential parts to local trajectory generation. They are estimated using only smartphone built-in accelerometer and gyroscope sensors. Offset and turning are characterized by displacement and rotational angle, respectively. Our algorithm regards local user motion and absolute WiFi localization of equal importance.
4.1.1. Displacement Measurement
Ideally, displacement can be obtained by integrating forward acceleration twice directly. However, the accumulative error makes this method unusable for researchers. Heuristically, we treat this as a velocity estimation problem. Since we can easily get the noisy acceleration of y-axis (forward direction, denoted by
If we admit

Kalman filter process and our parameters.
To make it simple, we set
Notice that, in the aforementioned formula,
To obtain an accurate
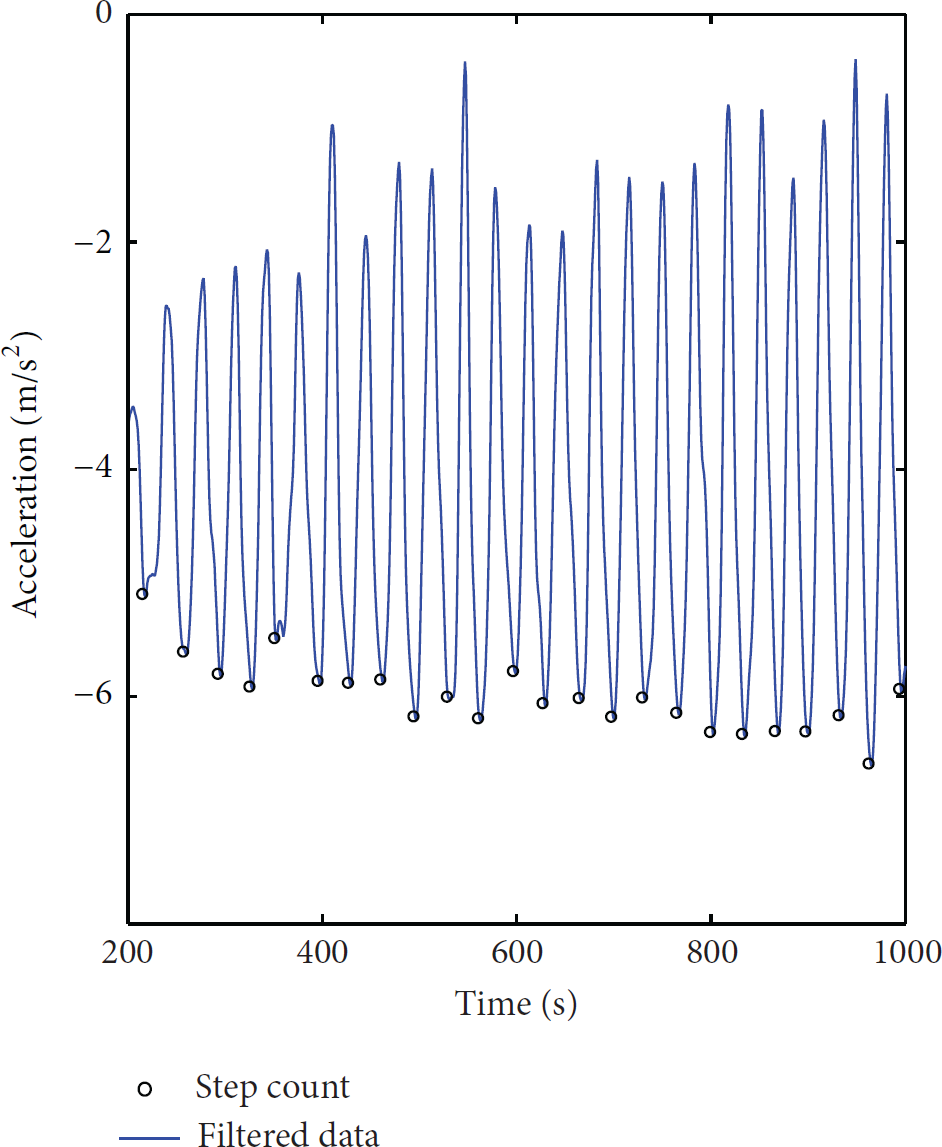
Step counting after wavelet filtering.
As mentioned above, different users exhibit different walking patterns, for example, as shown in Figure 5, mean and variance of

Walking patterns of different users exhibit distinct characteristics.
After the foregoing process, the previous algorithm with new
The cumulative errors in dead reckoning using the accelerometer are used to be avoided in the process of velocity estimation, but we heuristically leverage them to play a role in updating the covariance matrix as residual in Kalman filter process.
4.1.2. Rotational Angle Measurement
As direction estimation is not our main contribution, we generate the rotational angle integrating the angular velocity
4.2. Relative Coordinate Generation
Both offset and direction suffice for sketching moving trajectory. Let

Relative coordinate generation using offset and turning.
4.3. Absolute Coordinate Generation
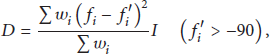
Absolute coordinate consists of the spots we locate using the WiFi fingerprinting technique during the interval. Since RSSI fingerprints acquisition and matching are not our emphasis, we refer to the approach in [11] and adjust it to ours by finding the least distance between the experimental vector and a vector from the WiFi fingerprint database.
We are proceeding on the supposition that there is already a fingerprint database, by whatever means, crowdsourcing, or site survey. During the time when user moves, we record the sensor data and take RSS samples of each obtainable AP using smartphones. Let the offline and online fingerprint sets be
5. Coordinate Transformation
In this section, our purpose is to rectify the absolute location generated by WiFi-based technique by means of coordinate transformation with the help of local trajectory curved by dead reckoning. We describe the problem as a process that places the trajectory in local coordinate into the absolute one perfectly fitting the origin route shown by WiFi located spots. We adopt a robust fitting method for this problem, called least median of squares (LMS) fit algorithm, which is helpful dealing with outliers.
5.1. Problem Analysis
We can see in our case a curve fitting problem instead of coordinate transformation. Suppose that

5.2. Method Details
In this subsection, we explain the solution in detail which consists of LS fit, random sampling algorithm (RANSAC), and forward search.
5.2.1. Least Squares Fit Algorithm
LS fit is an ordinary solution to our problem at the beginning, and it is able to deliver a reasonable report to our problem. LS fit is classical for its robustness to noise, but unfortunately, not immune to outliers which are quite often in this specific scenario where indoor absolute coordinate is generated by untrustworthy WiFi-based technique.
We adopt Horn's method [19] to solve LS fit and get the rotation matrix


We first deal with the translation, then scaling, and rotation at last, with respect to the sum of residual errors for each process following the method in [19].
5.2.2. Random Sampling Algorithm
RANSAC is an effective way to solve (3). The first step is to select k point pairs randomly in both point sets, computing the initial transformation
5.2.3. Forward Search Algorithm
Noting that the RANSAC is not that satisfactory due to its usage of fixed k and M, we adopt the forward search algorithm to avoid fixed variables. The key point of this algorithm is to search a small subset using LMS first and iteratively update it by adding an eligible point at a time. It is in contrast to the backward algorithms, dealing with the whole set and then deleting ill points. Forward search algorithm is more efficient than the above for our real-time demand.
5.3. LMS Fit Algorithm
Now, putting all these means together, we explain our LMS fit algorithm step by step. For the point sets Generate the small subset Compute the transformation Add the pair of points with the minimal residual in the remaining sets into Repeat (2) and (3) until the minimal residual is larger than a threshold and the iterative times are larger than another threshold. At last, we have the optimal transformation
With the help of the robustness of LMS fit in preserving the rigid core [13], we can have the transformation process less sensitive to outliers, thus achieving a better localization result.
6. Evaluation
We evaluate the proposed approach above, by implementing a prototype system of TraIL on the Android platform. We first explain the experiment settings and methodology, and then we present the performance of the integrated system after the detailed evaluation of each parts.
6.1. Experiment Environment and Methodology
We implemented the TraIL on Android OS on HTC One phones, supporting acceleration, angular velocity, and RSS data collection. The accelerometer and gyroscope are of 50 Hz and 800 Hz frequency, respectively, and the WiFi signals are scanned twice per second. In our TraIL prototype, the sampling rate is set to follow the WiFi signal receiving module for the consideration of energy cost and computation complexity.
We evaluated the performance of TraIL in the East Main Building at Tsinghua University as shown in Figure 1. The experiment area is 50 m × 50 m in size, including hallways, classrooms, stairs, and laboratories. All areas are covered by deployed APs. When users are walking and using their smartphones for localization, the data are meanwhile collected automatically, including RSS and sensor readings. Accordingly, we form absolute and local trajectories for further use.
We collected data from 3 users with diverse heights, different walking paces, and stride lengths. In the mean time, our experiment is tested on 21 traces. In realistic scenarios, users can walk naturally and casually instead of addicting to the predicted routes.
6.2. Performance Evaluation
We first validate the walking speed estimation, along with step counting, velocity, and stride length accuracy. Then we come to the trajectory generation analysis, including the local one and the absolute one. Finally, we can evaluate the localizing accuracy by examining the coordinate transforming method.
6.2.1. Walking Speed Estimation Accuracy
To validate the estimation algorithm, we analyze 21 traces with various velocities. One user's actual walking speed is measured as the quotients of the path length to the time duration. The accuracy of velocity estimation is enhanced by 38% in average under different circumstances. There follows the velocity error of 21 traces in Figure 7(a), where we can get a mean error of 0.21 m/s.

Errors in different traces: (a) the velocity error; (b) the stride length error; (c) the localization error.
6.2.2. Step Counting and Stride Length Estimation Accuracy
In the process, we calculate the user's stride length using the equation
6.2.3. Localization Accuracy
Now we turn to the localization accuracy of the raw WiFi method and the coordinate transformation algorithm. The positioning errors are analyzed in Figure 7(c). As shown in the graph, Horn's method reduces the average and maximum errors by around 6 m and 10 m, respectively, while LMS reduces the average and maximum errors by around by 8 m and 12 m. That is to say, by appropriately placing local trajectories on absolute coordinate, we can achieve an impressive improvement of 80.8%.
TraIL can achieve a submeter accuracy with smartphones. In Figure 8, we can see that the TraIL method works better for indoor localization compared to other four systems, Horus [4], Zee [23], UnLoc [7, 22]. Besides, [8, 12] have competitive reported accuracy of 0.73 m and 0.67 m. In [8], Woodmans work leveraged an extra device, foot-mounted inertial unit, to enhance the performance, while ours do not need additional equipment. As for [12], the authors focus on the fingerprint ambiguity, while we emphasize maintaining the shape of the trace to achieve a better accuracy. Also, [12] and ours both mention the stride length estimation. At this point, their offset measurements have a median and maximum error of 0.13 m and 0.46 m, respectively, while ours are 0.068 m and 0.17 m.

Experiment areas in the 10th district of the East Main Building.
7. Conclusion
In this paper, we have developed a novel architecture to provide a seamless indoor localization leveraging trajectories from RSSI fingerprinting and pedestrian mobility for coordinate transformation. On this basis, the WiFi-based positions are refined by the well-shaped local trajectory through the LMS fit. To explore the feasibility of our approach, we implemented a prototype of TraIL in a building. The experiment results suggest that TraIL can achieve an 80% accuracy improvement on average, manifesting its promising utilization in reality.
Footnotes
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Acknowledgment
This work is supported in part by NSFC under Grants 61171067, 61272429, 61303209, and 20120002130007 and Beijing Nova Program.