The paper studies the distortion performance of multihop underwater acoustic sensor networks. The network is composed of bottom mounted sensor nodes and the sensor to sensor links experience Rician fading. The distortion is evaluated for the case when there is interference from other sensors in the network. The focus is on the sustainable number of hops in the network for a maximum allowed (target) route distortion requirement. Numerical examples are provided that illustrate the results of the analysis and the regions where the network operation is limited, namely, the coverage-limited region and the interference-limited region. The paper also considers the impact of retransmissions on the distortion performance. It is found that the network connectivity and robustness improve with automatic repeat request (ARQ). The improvements are manifested as a reduction of the regions of limited performance, that is, an increase of the region where the network exhibits full connectivity. The analysis results are illustrated through numerical examples.
1. Introduction
Underwater acoustic communications pose many challenges that are not necessarily imposed in the design of terrestrial radio systems. This includes significant delays due to the low speed at which sound propagates under water. The attenuation (path loss) that the transmitted signal experiences does not only depend on the distance between the transmitter and the receiver, as commonly considered in terrestrial radio communications, but also depend on the carrier operating frequency. As such, the judicious choice of the carrier operating frequency is paramount for an efficient operation of an underwater communication system. The design of underwater communication systems also needs to take into consideration the frequency selective fading that is experienced by a signal transmitted over an underwater acoustic channel.
There have accordingly been significant efforts geared towards physical layer designs for underwater acoustic communications [1]. This has led to a number of studies of underwater acoustic networks [1–4]. Medium access control protocols have been proposed specifically tailored for underwater acoustic networks. Syed et al. [5] proposed T-Lohi, a tone-based contention resolution mechanism that takes advantage of both the space-time uncertainty and high latency in order to detect collisions and count contenders. Propagation delay tolerant MAC protocol design through an improved handshaking mechanism has been proposed by Guo et al. [6]. Diamant and Lampe [7] proposed the application of the spatial reuse concept and the utilization of direct sequence spread spectrum to obtain a hybrid spatial reuse time division multiple access protocol. A hybrid reservation MAC protocol based on channel reservations and spread spectrum technology has also been considered by Fan et al. [8]. Ng et al. focused on MAC protocol based on a concurrent, bidirectional bursty data packet exchange between the sender and the receiver aimed at improving the data transmission efficiency [9]. An extensive survey of MAC protocols for underwater acoustic networks has been presented in [10].
Routing schemes for underwater acoustic networks have also been investigated. Pompili et al. proposed a distributed geographical routing algorithm [11]. Mohapatra et al. proposed to combine routing with node replacement [12] in order to obtain an energy efficient underwater sensor network. Delay sensitive routing schemes for underwater acoustic sensor networks have been explored by Javaid et al. [13], while a survey on routing for delay/disruption tolerant underwater acoustic sensor networks can be found in [14].
The paper considers the distortion performance of multihop underwater acoustic sensor networks. The multihop routes are formed by routing information among nearest neighbor sensor nodes. It is assumed that the sensors are mounted at the bottom and that the channels between neighboring sensors experience Rician fading. The focus of the study is on the network connectivity. The paper investigates the sustainable number of hops in the network given a target route distortion requirement in the presence of interference from other sensors in the network. The distortion performance is characterized through the identification of the coverage-limited region and the interference-limited region. These are regions where the network exhibits limited performance since the number of sensors is too small or too large, respectively, given the coverage area of the network.
In addition, the paper studies the impact of ARQ on the distortion performance of the network. It is found that the network connectivity and robustness can be improved through the consideration of ARQ. The improvements are manifested as a reduction of the regions of limited performance, that is, an increase of the region where the network exhibits full connectivity.
The considered network setting could potentially be of interest in the context of underwater monitoring by a field of sensors, the tracking of targets, which may be either natural or man-made, and so forth.
The organization of the paper is as follows. Section 2 briefly introduces the underwater acoustic propagation model. Section 3 describes the sensor network setup and focuses on the network connectivity. It investigates the distortion performance of the underwater acoustic sensor network and the impact of ARQ. Numerical examples that illustrate the distortion performance are presented in Section 4. Section 5 concludes the paper.
2. Underwater Acoustic Propagation
Underwater acoustic communication experiences attenuation, that is, path loss, for a signal transmitted on frequency f, which is characterized by , where is a unit-normalization constant, which also incorporates fixed losses, d is the distance between the communicating sensors, is the absorption coefficient, depicted in Figure 1, and κ is the spreading factor. Commonly
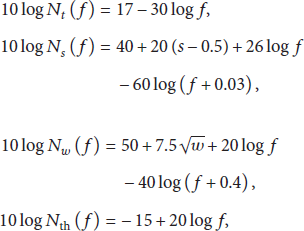
The absorption coefficient given in dB/km for the signal frequency f in kHz: [15].
The overall ocean ambient noise is comprised of turbulence, shipping, waves, and thermal noise, described by Gaussian statistics and continuous power spectral densities (p.s.d.'s) in dB re μPa per Hz for the frequency in kHz [15]:
where s is the shipping activity factor and w is the wind speed in m/s. The p.s.d. of the overall ocean ambient noise is simply the sum of the above four components.
3. Network Connectivity
3.1. Sensor Network Setup
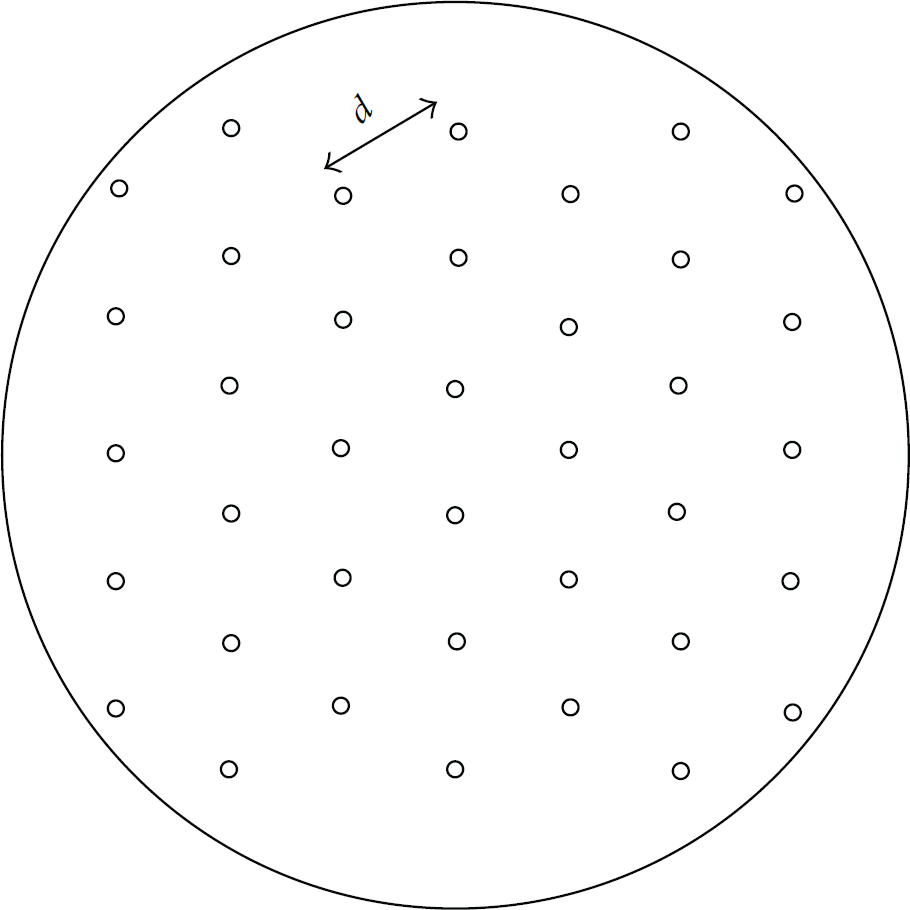
The assumption is that the network has N sensor nodes, uniformly distributed over an area, , as depicted in Figure 2. It is also assumed that the sensors are bottom mounted; therefore a two-dimensional network model is considered. The network density is . It follows that the distance between neighboring sensors is , with c being a constant dependent on the placement of the sensors (we simply let ). The network routes information through multihop transmission among nearest neighbor sensors. It is assumed that the discovery of the route from the source to the destination has been successful. The maximum number of hops is , while the average is [16].
The setup of the sensor network.
Without the loss of generality, uncoded BPSK transmission is considered. The sensors forward the information using the demodulate and forward protocol. The multihop route frame error probability (FEP) is
where denotes the number of hops, is the bit error probability (BEP) of a link between two neighboring sensors, and L is the size of the frame in bits.
3.2. Distortion Performance
We focus on the distortion performance for the case of an independent identically distributed (i.i.d.) Gaussian source and single description coding. In this case, for a sequence of i.i.d. Gaussian random variables with variance , encoded at bit rate R using an optimal source coder, the distortion is [17].
The route distortion can be calculated as
It follows that
Hence, the sustainable number of hops can be obtained as
where denotes the maximum allowed route distortion.
3.3. Performance with ARQ
We also consider the scenario where a simple stop and wait ARQ protocol is considered on a hop-by-hop basis. In this case, the link FEP is [16]
where J denotes the maximum number of retransmissions per hop and . The route FEP for hops is
Hence, following arguments similar to the previous section, the sustainable number of hops becomes
3.4. Interference Model
Consider a transmission from a source to a destination. The interference model imposes a protocol constraint, as depicted in Figure 3. No sensors whose distance to the destination is the same as the source-destination distance can transmit while the source is transmitting [4]. Under the assumption of a constant p.s.d. S for all transmitting sensors, the overall interference is
where and are constants that indicate how many sensors contribute to the interference from tier 1 and tier 2, respectively, given a hexagonal grid. In Figure 3 example, (black circles). Given that there are many sensors that contribute to the interference, a Gaussian interference with p.s.d. is assumed.
The model of interference in the network.
Under the assumption of perfect channel state information at the receiving node and flat Rician fading for the channel between two neighboring sensors [18, 19], the BEP is [20]
where γ denotes the signal to interference plus noise ratio (SINR) that evaluated at the operating frequency is
where P denotes the transmission power level and B the bandwidth in kHz centered at the operating frequency. For systems as OFDM [21], this could be the subband of one carrier; this means that indicates the performance on that particular carrier, while the other carriers' performance would depend on each carrier's operating frequency.
4. Numerical Results
The focus is on the distortion performance and the impact of ARQ on the connectivity that the sensor network can provide as indicated by the sustainable number of hops, . Independent Rician fading for each channel between neighboring sensors with is assumed. The variance of the i.i.d. Gaussian random variables is . The route distortion is required to be within a certain percentage of the optimum achievable distortion [17]. The circular network has an area of km2. Any fixed losses are neglected.
We have bits and kHz. The sensors have the capability to vary their transmission power levels to make sure that the sustainable number of hops does not become greater than given in Section 3.1. We let , , and unless otherwise indicated m/s.
4.1. Distortion Performance of the Sensor Network
Figure 4 depicts when there is interference in the network, as illustrated in Figure 3. The transmission power level is dB re μPa. The rate is bits per description and the target (maximum allowed) route distortion is within 10% of the optimum achievable distortion; that is, %. We observe that when the number of sensor nodes in the network is , the network is coverage limited. The number of sensors in the network is small and the sensors are too far apart to be able to maintain routes that satisfy the target route distortion requirement given their transmit power. On the other hand, when the number of sensors in the network is , the network is interference limited. As the number of sensors in the network increases, the interference from the transmissions of other sensors in the network limits the performance and the sustainable number of hops in the network decreases. As observed, when the network cannot even maintain routes with an average number of hops given the route distortion requirement.
for bits per description and %.
Figure 5 presents for various values of the target route distortion % when the rate is bits per description. The transmission power level is dB re μPa. We observe that when % the network provides full connectivity for the considered transmit power level regardless of the number of sensor nodes in the network. As the target route distortion gets closer to the optimum achievable distortion, it becomes increasingly more challenging to maintain routes that can meet the more stringent route distortion requirements. Indeed, the network becomes interference limited when the number of sensors in the network is and for the case when % and %, respectively. Moreover, in the case when % and even routes with an average number of hops can no longer be maintained by the network. Note that due to the increased transmission power level needed to meet the route distortion requirement when the number of bits per description is increased, the transmission power level is sufficient to provide connectivity when the number of sensors in the network is small. In other words, the network does not become coverage limited when the number of sensors in the network is small.
for various values of the target route distortion % and bits per description.
4.2. Impact of ARQ
Figure 6 illustrates the impact of ARQ on the sustainable number of hops for various maximum numbers of retransmissions. The rate is bits per description and the target route distortion is within 10% of the optimum achievable distortion. The transmission power level is dB re μPa. For the case of BPSK without retransmissions, the network cannot really provide any connectivity, regardless of the number of sensor nodes in the network. If we consider ARQ transmission with , the network distortion performance can be somewhat improved as illustrated by the fact that the network can maintain routes with an average number of hops when the number of sensors is . It is nonetheless readily observed that the network does not exhibit full connectivity for any value of N. Further improvements in the network performance are possible through an increase of the maximum number of retransmissions per hop. Hence, when ARQ transmission with and is considered, the network becomes coverage limited when the number of sensors in the network is and , respectively. Note that as ARQ makes it possible for the network to operate at a lower transmission power level, the distortion performance of the network is not limited by interference. In other words, the network does not become interference limited when the number of sensors in the network is large.
for various maximum numbers of retransmissions. bits per description and %.
Figure 7 illustrates the robustness that ARQ transmission provides in the presence of increased wind speeds. The wind speed is m/s. The rate is bits per description and the target route distortion is within 10% of the optimum achievable distortion. The transmission power level is dB re μPa. Again, in the case of BPSK without retransmissions, the network does not really provide any connectivity, regardless of the number of sensor nodes in the network. If ARQ transmission, with , , and , is considered, the network becomes coverage limited when the number of sensors in the network is , , and , respectively. Hence, the network distortion performance improves through ARQ as the maximum number of retransmissions per hop is increased. In other words, ARQ improves the robustness of the network with respect to increased wind speeds.
for ARQ transmission with various maximum numbers of retransmissions for m/s. bits per description and %.
Similarly, Figure 8 investigates the robustness that ARQ transmission provides in the scenario when the wind speed is m/s, the rate is bits per description, and the target route distortion is within 10% of the optimum achievable distortion. The transmission power level is dB re μPa. We observe that in the case of BPSK transmission without considering retransmissions the network can provide full connectivity only when the number of sensor nodes in the network is The consideration of ARQ with ensures that the network can provide full connectivity for all values of N. Hence, for the considered transmit power level full connectivity in the network can be readily maintained in spite of the increased wind speed of m/s, through the consideration of ARQ transmission with .
for ARQ transmission when bits per description, %, and m/s.
5. Conclusions
The paper investigated the distortion performance of underwater acoustic sensor networks. The focus was on the network connectivity, as indicated by the sustainable number of hops, given a target (maximum allowed) route distortion for a network of bottom mounted sensors and multihop transmission. The sustainable number of hops was evaluated for the case of an independent identically distributed (i.i.d.) Gaussian source and single description coding. The route distortion was required to be within a certain percentage of the optimum achievable distortion. The distortion analysis revealed the regions where the network operation is limited, namely, the coverage-limited region and the interference-limited region. Numerical results were presented that supported the results of the analysis and illustrated the dependence between the network connectivity and the route distortion requirement.
The paper also considered the impact of ARQ on the distortion performance of the network and found that the number of sustainable hops can be significantly improved through ARQ. The analysis focused on the case of the stop and wait ARQ protocol. It was found that the network connectivity improved as the number of retransmissions increased. Moreover, ARQ was also found to improve the network robustness as specifically considered for the case of increased wind speeds. The analysis results were demonstrated through numerical examples.
Footnotes
Conflict of Interests
The author declares that there is no conflict of interests regarding the publication of this paper.
References
1.
Special Issue on Underwater Wireless Communications and Networks, IEEE Journal on Selected Areas in Communications, vol. 26, no. 9, 2008
2.
Special Issue on Underwater Networks, Ad Hoc Networks, Elsevier, vol. 7, no. 4, 2009
3.
Special Issue on Underwater Sensor Nodes and Underwater Sensor Networks, Sensors, MDPI Publishing, 2011-2012
4.
StefanovA.StojanovicM.Design and performance analysis of underwater acoustic networksIEEE Journal on Selected Areas in Communications201129102012202110.1109/jsac.2011.1112112-s2.0-82055197465
5.
SyedA. A.YeW.HeidemannJ.Comparison and evaluation of the T-Lohi MAC for underwater acoustic sensor networksIEEE Journal on Selected Areas in Communications20082691731174310.1109/JSAC.2008.0812122-s2.0-57049115532
6.
GuoX.FraterM. R.RyanM. J.Design of a propagation-delay-tolerant MAC protocol for underwater acoustic sensor networksIEEE Journal of Oceanic Engineering200934217018010.1109/JOE.2009.20151642-s2.0-67349150126
7.
DiamantR.LampeL.Spatial reuse time-division multiple access for broadcast Ad hoc underwater acoustic communication networksIEEE Journal of Oceanic Engineering201136217218510.1109/joe.2011.21079502-s2.0-79957872481
8.
FanG.ChenH.XieL.WangK.A hybrid reservation-based MAC protocol for underwater acoustic sensor networksAd Hoc Networks20131131178119210.1016/j.adhoc.2013.01.0022-s2.0-84875729440
9.
NgH.-H.SohW.-S.MotaniM.A bidirectional concurrent MAC protocol with packet bursting for underwater acoustic networksIEEE Journal of Oceanic Engineering201338354756510.1109/joe.2012.22275532-s2.0-84880571007
10.
ChenK.MaM.ChengE.YuanF.SuW.A survey on MAC protocols for underwater wireless sensor networksIEEE Communications Surveys and Tutorials20141631433144710.1109/surv.2014.013014.000322-s2.0-84906786932
11.
PompiliD.MelodiaT.AkyildizI. F.Distributed routing algorithms for underwater acoustic sensor networksIEEE Transactions on Wireless Communications2010992934294410.1109/twc.2010.070910.1001452-s2.0-77956945024
12.
MohapatraA. K.GautamN.GibsonR. L.Combined routing and node replacement in energy-efficient underwater sensor networks for seismic monitoringIEEE Journal of Oceanic Engineering2013381809010.1109/JOE.2012.22088502-s2.0-84872338529
13.
JavaidN.JafriM. R.AhmedS.JamilM.KhanZ. A.QasimU.Al-SalehS. S.Delay-sensitive routing schemes for underwater acoustic sensor networksInternational Journal of Distributed Sensor Networks201520151353267610.1155/2015/532676
BrekhovskikhL.LysanovY.Fundamentals of Ocean Acoustics1982Springer10.1007/978-3-662-02342-6
16.
TonguzO.FerrariG.Ad Hoc Wireless Networks: A Communication-Theoretic Perspective2006Wiley
17.
CoverT. M.ThomasJ. A.Elements of Information Theory1991John Wiley & Sons10.1002/0471200611MR1122806
18.
QarabaqiP.StojanovicM.Statistical modeling of a shallow water acoustic communication channelProceedings of the Underwater Acoustic Measurements ConferenceJune 2009Nafplio, Greece
19.
QarabaqiP.StojanovicM.Statistical characterization and computationally efficient modeling of a class of underwater acoustic communication channelsIEEE Journal of Oceanic Engineering201338470171710.1109/JOE.2013.22787872-s2.0-84886907311
20.
BenedettoS.BiglieriE.Principles of Digital Transmission with Wireless Applications1999Kluwer Academic Publishers, Plenum Press
21.
HanzoL.KellerT.OFDM and MC-CDMA: A Primer2006Wiley-IEEE Press