
Abstract
We address the problem of DOA estimation in positioning of nodes in wireless sensor networks. The Stochastic Maximum Likelihood (SML) algorithm is adopted in this paper. The SML algorithm is well-known for its high resolution of DOA estimation. However, its computational complexity is very high because multidimensional nonlinear optimization problem is usually involved. To reduce the computational complexity of SML estimation, we do the following work. (1) We point out the problems of conventional SML criterion and explain why and how these problems happen. (2) A local AM search method is proposed which could be used to find the local solution near/around the initial value. (3) We propose an algorithm which uses the local AM search method together with the estimation of DML or MUSIC as initial value to find the solution of SML. Simulation results are shown to demonstrate the effectiveness and efficiency of the proposed algorithms. In particular, the algorithm which uses the local AM method and estimation of MUSIC as initial value has much higher resolution and comparable computational complexity to MUSIC.
1. Introduction
Wireless sensor networks (WSNs) are commonly employed for many applications including environmental protection, structural monitoring, and passive localization and tracking. Positioning is a basic problem for most wireless sensor network applications [1–3].
There are mainly two categories of WSNs node localization methods, that is, range-based localization scheme and range-free localization scheme. The accuracy of the former is obviously higher than that of the latter. Range-based localization methods include many techniques such as received signal strength indicator (RSSI), time of arrival (TOA), time difference of arrival (TDOA), and direction of arrival (DOA) [4–6]. This paper mainly focuses on the DOA estimation algorithm in WSNs.
To ensure the timeliness and accuracy of the system, the DOA estimation algorithm must have low computational complexity and high DOA resolution. Multiple Signal Classification (MUSIC) [7, 8] and Estimation of Signal Parameters via Rotational Invariance Techniques (ESPRIT) [9] are two widely employed algorithms for DOA estimation in many communication systems [6, 10, 11] because the resolution of them is acceptable in some cases and the computational complexity is low enough such that timeliness of the system can be guaranteed. However, these two algorithms cannot deal with coherent signals directly which happens, for example, in multipath propagation in real environment. In this case, preprocessing techniques such as spatial smoothing [12] and matrix reconstruction [13] methods are needed. These techniques have to reduce the rank of data covariance matrix as a precondition which means that the accuracy or the array aperture would be lost [14]. Furthermore, the resolution of MUSIC and ESPRIT decreases greatly when Signal-to-Noise Ratio (SNR) gets lower for both coherent and noncoherent signals cases.
In this paper, we adopt the Stochastic Maximum Likelihood (SML) algorithm for DOA estimation. The SML algorithm is much more superior to MUSIC and ESPRIT. It can deal with small number of snapshots. It can also handle coherent signals without any preprocessing technique and the resolution is much higher than that of MUSIC and ESPRIT. However, the estimation of SML is a multidimensional nonlinear optimization problem. Therefore, its computational complexity is usually very high. That is the reason why the SML algorithm has not been adopted in practical systems.
For multidimensional nonlinear optimization problem, many estimation algorithms have been proposed such as Alternating Projection (AP) [15], Expectation Maximization (EM) [16], Space Alternating Generalized EM (SAGE) [17], genetic algorithm [18], ant colony algorithm [19], and Particle Swarm Optimization (PSO) [20, 21]. They are all iterative techniques. The computational complexity of SML with these algorithms is still much higher than the estimation of MUSIC or ESPRIT. The main drawback of these algorithms is that they could be trapped into a local maximum.
In this paper, we focus on how to reduce the computational complexity of SML estimation of DOA.
For SML criterion, there are two versions. the first one is proposed by Bohme [22]. Many literatures [23, 24] have pointed out that, in the formulation of this criterion, an important constraint that the estimated signal covariance matrix must be nonnegative definite was omitted. As a result, the global solution of this SML criterion is not unique in some cases. We call this version conventional SML. With consideration of this constraint, [23] has derived a new SML criterion. This criterion shows excellent resolution of DOA estimation and its global solution is always unique. We call it Exact SML. The Exact SML criterion involves large amount of eigendecomposition. Its computational complexity is much higher than that of conventional SML and it is hard to exploit new efficient algorithms for the estimation.
Based on the conventional SML criterion, firstly we impose the omitted constraint to get the solution space. Then, it is clear to distinguish whether the global solution is optimal or not. We find that the optimal or suboptimal solution of conventional SML does exist, but in some cases the optimal solution is not the global one. From large amount of simulation and deep analysis of the intrinsic relationship between DML and SML, we find that the reason is that the distinct part between DML and conventional SML criteria leads to the problem. Based upon the analysis above, firstly we propose a local Alternating Minimization (AM) search method which can find the local solution near/around the initial value. Since the solution of DML is always unique and it is near/around the true DOA (also the solution of Exact SML), the solution of DML becomes the best initial value to get the optimal or suboptimal solution of conventional SML criterion. Simulation results show the validity of the proposed algorithm. The computational complexity of the proposed algorithm is also reduced greatly.
To reduce computational complexity further, we use the solution of MUSIC as initialization and then use the local AM method to find the optimal or suboptimal solution of conventional SML. From simulation results, we can find that this algorithm shows much higher resolution than MUSIC and its computational complexity is comparable to MUSIC. Thus, this proposed algorithm is of great practical value.
The rest of this paper is organized as follows. In Section 2, we introduce the problem of DOA and the formulation of DML and conventional SML. In Section 3, we show the problems of conventional SML and propose two algorithms to get the optimal or suboptimal solution of conventional SML criterion. Simulation results are shown in Section 4 and conclusion is drawn in Section 5.
2. System Model and Problem Formulations
Without loss of generality, consider that there are p sensors and q narrow-band sources far from the array, centered around a known frequency, impinging on the sensor array from distinct directions
Note that the received signals may be coherent because of multipath propagation. In the case where there are signals coherent, the independent signal number is less than q. The task of DOA estimation is to detect all q directions. Also note that here we assume that the signals are narrow-band. For wideband signals, the CSM algorithms [25] can be used as a preprocessing to change into the narrow-band.
Furthermore, we assume that the number of sensors should be greater than the number of received signals; that is,
2.1. Problem Formulation of DOA
Using complex envelope representation, the p-dimensional vector received by the array can be expressed as


In the matrix notation, (1) can be rewritten as




Suppose that the received vectors


For DOA estimation, we have the following common assumptions.
The array configuration is known and any p steering vectors for different q directions are linearly independent; that is, the matrix p, q, and r satisfy the condition that a unique solution of DOA exists in the noise-free case. When the direction θ is expressed by a single real parameter, the sufficient condition of the uniqueness is given by

2.2. Maximum Likelihood Estimation
There are two ML algorithms. One is Deterministic ML, and the other is Stochastic ML. Difference between them lies in their models of signals. The solution of DML is always unique when a unique solution exists, while the solution of the conventional SML is not unique in some cases. Our first task is to reveal the reason why and how the problems happen in the conventional SML. As a contrast, we introduce these two algorithms briefly.
2.2.1. Deterministic ML (DML)
The DML estimator is derived by imposing the following assumption on the signals in addition to (A1)–(A5):
The DML criterion according to [15] is given by


2.2.2. Stochastic ML (SML)
The SML criterion of DOA is formulated under the following assumption:
According to the assumptions (A2), (A3), and (A6S),

The joint density function of the sampled data


The SML estimation of DOA is to be stated as the problem to find Θ which maximizes (15) under the following conditions:
According to [22, 24, 27], when condition (C2) is omitted, the estimation of



As [23, 24] have pointed out, the above conventional SML criterion is formulated by considering that
To overcome this defect, [23] has derived a new SML criterion with consideration of condition (C2). This criterion shows excellent resolution of DOA estimation and its global solution is always unique. It is called Exact SML. The Exact SML criterion involves large amount of eigendecomposition. Its computational complexity is much higher than that of conventional SML and it is hard to exploit new efficient algorithms for the estimation. Therefore, in this paper, we try to find out how these problems of the conventional SML happen and whether there are efficient methods to get the optimal or suboptimal solutions of SML.
3. Properties of Conventional SML and Efficient Algorithms
In this section, firstly we define a new model of observation data, and we express the DML and SML criterions in unified forms. After that we explain why the global solution of conventional SML is not unique in some cases. Then, we analyze the properties of all the local solutions of conventional SML. Finally we propose two effective and efficient algorithms to find the optimal or suboptimal solution of SML.
3.1. Unified Forms of DML and SML
Model (1) or (3) can be rewritten as follows:

Using a square root matrix of a nonnegative definite matrix (for a nonnegative definite matrix



Define the unitary matrix



The DML criterion can be rewritten as




3.2. Problems of Conventional SML
Since in the formulation of conventional SML condition (C2) is omitted, in this subsection, firstly we have an important definition of solution space. Define

Obviously, the global solution of (30) which locates in the solution space is the optimal solution of SML. The global solution which locates out of the solution space is not optimal.
In (30), define


Next, we analyze the nonuniqueness of global solution of conventional SML criterion in two cases.
3.2.1. Noise-Free Case
Because of assumption (A5), a unique solution of DOA exists. As proved in the Appendix, the DML estimator has a unique solution in the noise-free case. Therefore, the DML estimator provides the true directions of arrival Θ.
In the noise-free case,
Next, we consider the question if there exists
Since


The remaining question is whether there exists

Numerical solutions of (35) are shown in Figure 1, where the sensor spacing

Orbits of
From Figure 1, it can be confirmed that there exist an infinite number of
3.2.2. Noisy Case
In noisy case, to analyze the nonuniqueness of the global solution of conventional SML, we do simulations to plot all of the local solutions of it. In Figure 2, we show two samples. The simulations are done with uniform linear arrays of omnidirectional sensors which is the same as above. The true DOA are 0° and 8°. The scenarios are described in captions. In Figure 2, the shadow area is the solution space according to (31). Obviously, the solution which locates in this area can guarantee condition (C2). The crosses represent all local solutions.

Samples in the conventional SML estimation with uniform linear arrays of omnidirectional sensors:
In Figure 2(a), the local solution point A locates in the solution space and it is the closest to the true DOA. Furthermore, we find that this solution coincides with the solution of Exact SML [23]. Therefore, point A is the optimal solution of SML. However, in fact, the local solution point B is the global solution of conventional SML. As a result, global search methods fail in this case of conventional SML estimation.
In Figure 2(b), point C is the solution of exact SML and there is no local solution of conventional SML in the solution space. It means that all the solutions can not guarantee condition (C2). In fact, this case rarely happens only when the SNR is low, for example, when SNR = 0 dB. Point E is the global solution of conventional SML although it is obviously not the adequate solution. Therefore, global search methods also fail in this case.
Note that although point D locates out of the solution space, it is the nearest local solution to the true DOA. We call this local solution the suboptimal solution of SML. Comparing the criterions of DML and conventional SML, that is, (29) and (30), we can find that the minimization of DML criterion equals the minimization of
3.3. Exact SML Estimation
From the analysis above, we can know that the essential reason of the failure of conventional SML is that its criterion is formulated without considering condition (C2). The main idea of the exact formulation of SML is how to guarantee condition (C2) while maximizing the log-likelihood function (15).
According to [23], the exact SML is shown as follows.
Let




Note that the index
3.4. Efficient Algorithms for Conventional SML Estimation
From the analysis above, we can obtain the following two important properties of conventional SML criterion:
Global search methods fail in conventional SML estimation. The optimal or suboptimal solution of conventional SML does exist in all local solutions.
Therefore, the next problem is how to find the optimal or suboptimal solution of conventional SML. Since global search methods fail in DOA estimation of conventional SML, here we propose a local search method. This local search method is based on the Alternating Minimization (AM) algorithm.
3.4.1. Local AM Algorithm
The local AM algorithm contains two phases:
Initialization phase: determine a set of initial values of directions. Convergence phase: repeat the following updating process until all parameters are converged. At each updating process, let one parameter, say
Note that in the convergence phase the parameter is updated by one-dimensional local search. Therefore, the search result is a local minimum which is near/around the initial value. As a result, the initial value is very important. Furthermore, since local search method is used, the computational complexity of this process is low.
3.4.2. Efficient Algorithms
As we have analyzed above, the solution of DML is unique (see the proof in the Appendix). The distinct part between DML and conventional SML criterions leads to the problem of conventional SML but it also makes the optimal solution of conventional SML have higher resolution than that of DML. It can be considered that the solution of DML is just near/around the optimal or suboptimal solution of SML. Then, the solution of DML becomes a best initial value.
Therefore, for conventional SML estimation, we propose the first algorithm which uses the local AM method together with the solution of DML as initial value. The effectiveness of this proposed algorithm can be verified in the simulation section.
For DML estimation, it is still a multidimensional nonlinear optimization problem. Its computational complexity is still much higher than that of MUSIC. Then, an inspiration comes to us that why do not we use the solution of MUSIC as initial value since the solution of MUSIC is unique and it is also near/around the optimal or suboptimal solution of conventional SML. Then, its computational complexity could be greatly decreased.
Therefore, we propose the second algorithm which uses the local AM method together with the solution of MUSIC as initial value. Next we show the effectiveness and efficiency of the proposed two algorithms through simulations.
4. Simulations
In this section, simulations are shown to demonstrate the effectiveness and efficiency of the proposed algorithms by comparing with Exact SML and MUSIC.
In the simulations, the array configuration is a uniform linear array composed of omnidirectional sensors, of which steering vector is represented as
The SNR is defined as


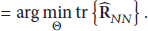
In all figures, “Exact SML” represents the Exact SML criterion and the estimation algorithm is the original AM algorithm [15]. “MUSIC” denotes the MUSIC algorithm [7]. Note that, for coherent cases, the spatial smoothing [12] method is used. “DML + Local” is the proposed algorithm one which uses DML solution as initial value and local AM method of the estimation for conventional SML criterion. In the estimation of DML, we use the AP algorithm [15]. “MUSIC + Local” represents the proposed algorithm two and the only difference to “DML + Local” is that it uses the estimation of MUSIC as initial value. “Operations” represents the summation of all the complex additions, subtractions, multiplications, and divisions in each algorithm, that is, the computational complexity.
Figure 3 is the case that all the received signals are independent. Figures 4 and 5 are the cases that there are signals coherent. The scenarios are described in each caption.

For incoherent case:

For coherent case:
For coherent case:
Figures 3(a), 4(a), and 5(a) show the resolution comparison of each algorithm. We can find the following:
“Exact SML” has the highest resolution while “MUSIC” is the worst. The resolutions of “DML + Local” and “MUSIC + Local” are almost the same. The resolutions of “DML + Local” and “MUSIC + Local” become the same as “Exact SML” when SNR grows to about 10 or 15 dB.
These points mean that the proposed two algorithms outperform the estimation of MUSIC in resolution and they can find the optimal solution of SML when SNR grows to about 10 or 15 dB.
Figures 3(b), 4(b), and 5(b) show the comparison of computational complexity between each algorithm. We can find the following:
“Exact SML” has the highest computational complexity. Its computational complexity grows heavily when the number of received signals (q) becomes larger because it is a multidimensional nonlinear optimization problem and its computational complexity depends on the dimension while AM algorithm is used. “MUSIC” has the lowest computational complexity. Its computational complexity does not grow so dramatically as “Exact SML” when q becomes larger because it is just a one-dimensional search problem. “DML + Local” also shows high computational complexity since the estimation of DML is also a multidimensional nonlinear optimization problem. The computational complexity of “MUSIC + Local” is comparable to “MUSIC” even when q becomes larger because of the local search AM algorithm.
The similar simulation results are observed in other scenarios. Therefore, we can conclude that the proposed two algorithms have good resolutions in DOA estimation which are better than that of MUSIC. In particular, the computational complexity of the proposed algorithm two (MUSIC + Local) is comparable to MUSIC.
5. Conclusions
This paper focused on how to reduce the computational complexity of SML estimation of DOA in positioning of nodes in WSNs. To find the optimal or suboptimal solution of SML, firstly, we proposed a local AM search method which can find a local minimum around the initial value. Then, we proposed two algorithms which use a local AM search method together with solution of DML and MUSIC as initial value, respectively. Simulation results have shown that the proposed two algorithms have better resolutions than that of MUSIC. Furthermore, the proposed algorithm which uses the local AM search method together with solution of MUSIC as initial value has comparable computational complexity to MUSIC. Next we will have practical application of this proposed algorithm in WSNs to check whether it could be applied in real systems and that is our following work.
Footnotes
Appendix
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Acknowledgments
The authors would like to thank all the editors and reviewers for their valuable comments and suggestions. This paper is supported by the following funds: Fundamental Research Funds for the Central University, China, nos. 24720152047A and 15CX05025A, Shandong Provincial Natural Science Foundation, China, no. ZR2014FM017, and Science and Technology Development Plan of Huangdao District, Qingdao, China, no. 2014-1-45.